一種基于Wi-Fi圖像控制的采摘機械手設(shè)計
2022-03-24 08:29:22崔嘉龍金旭星任宏洋
技術(shù)與市場 2022年3期
崔嘉龍,金旭星,鄔 凱,任宏洋,高 童
(無錫職業(yè)技術(shù)學(xué)院機械學(xué)院,江蘇 無錫 214121)
0 引言
長在較高枝頭處的果實往往個大味美,營養(yǎng)豐富。而基于多種因素,對此處的果實進行人工采摘卻是個難點。對于相關(guān)采摘設(shè)備的實際應(yīng)用上,除了一些功能簡單的輔助機械手外,目前尚無真正具有系統(tǒng)意義的高空采摘機械手。本項目的成果為一種基于Wi-Fi視頻回傳的模塊化采摘機械手,課題來自全國大學(xué)生機械創(chuàng)新設(shè)計大賽,大賽的主題為“關(guān)注民生,美好家園”。設(shè)計的是一種輔助人工進行蘋果、梨、柑橘、柿子等果實采摘的設(shè)備,其輕巧方便,便于攜帶,具有優(yōu)良的經(jīng)濟性。
1 整體方案
本設(shè)計的整體方案如圖1所示,主要包含:絲杠螺母副雙向差動伸縮桿、直流驅(qū)動電機、顯示屏、無線回傳攝像頭、對稱嚙合夾固臂、斜三角鋸齒形剪切刀片、直齒刃剪切刀片轉(zhuǎn)向舵機、轉(zhuǎn)向舵機、連接塊等構(gòu)件。其中,直流電機與雙向差動伸縮桿的輕質(zhì)正反牙梯形絲杠間以三組減速齒輪聯(lián)接,顯示屏通過可調(diào)式支架固定于伸縮桿外殼上,伸縮桿起始位置均設(shè)有行程開關(guān),所述的兩片剪切刀片呈V型聯(lián)接,轉(zhuǎn)向舵機嵌于連接塊中,轉(zhuǎn)向舵機的輸出齒輪與對稱嚙合夾固臂的不完全齒輪固聯(lián),對稱嚙合夾固臂為上下兩組,通過銅柱聯(lián)接。

1—絲杠螺母副雙向差動伸縮桿;2—直流驅(qū)動電機;3—顯示屏;4—無線回傳攝像頭;5—對稱嚙合夾固臂;6—斜三角鋸齒形剪切刀片;7—直齒刃剪切刀片轉(zhuǎn)向舵機;8、9—轉(zhuǎn)向舵機;10—連接塊。
功能的實現(xiàn)原理:利用STC51單片機編程進行電路部分控制,通過無線攝像頭進行遠端視頻實時回傳,兩路舵機控制刀頭部分進行180°旋轉(zhuǎn)定位;主電機經(jīng)齒輪機構(gòu)減速后,帶動絲杠螺母副實現(xiàn)桿的雙向伸縮,實現(xiàn)采摘高度的調(diào)節(jié)功能;利用舵機帶動齒輪連桿機構(gòu)實現(xiàn)剪切刀片的開合;通過網(wǎng)兜及軟管實現(xiàn)果實減震回收。
2 結(jié)構(gòu)設(shè)計與理論計算
2.1 剪切機構(gòu)
為增大剪切力,末端剪切部分采用的鉸鏈五連桿為雙曲柄機構(gòu),2個曲柄末端通過不完全齒輪機構(gòu)嚙合,方案如圖2所示。斜三角鋸齒形刀片除具有剪切作用外,還有收攏果實柄的作用,有效防止果實滑出刃口。
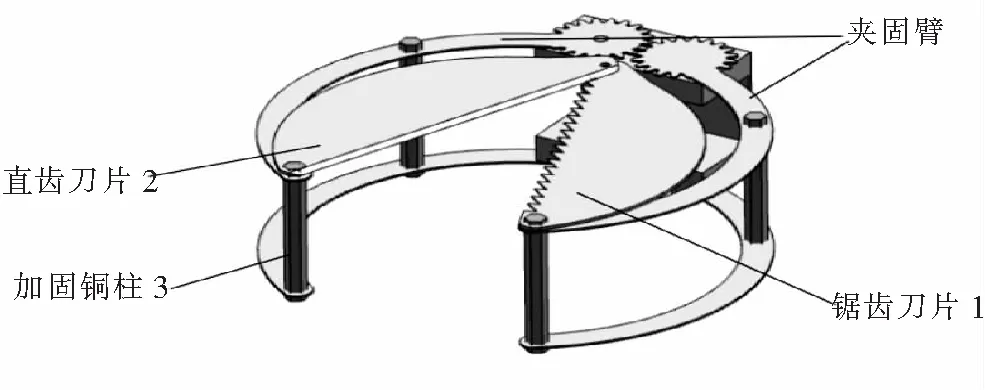
圖2 剪切機構(gòu)
剪切刀片長度選定為l1=150 mm,與不完全齒輪固聯(lián)的齒輪臂長l2=160 mm,兩嚙合齒輪中心距為a=21 mm,兩刀片開合角度為0~180°,為防止鉸鏈五連桿自鎖,須對舵機轉(zhuǎn)角α進行限制,可通過編程來實現(xiàn)。
通過平面幾何知識得:
剪切果柄動作由一個MG995金屬銅齒輪舵機提供動力,它能提供1.3 N·m的工作扭矩,反應(yīng)轉(zhuǎn)速52~63 r/min,非常符合本作品的使用需求。
果柄受到的剪切力為:
相關(guān)調(diào)查[4]統(tǒng)計分析了果實樣本采摘過程的受力。峰值壓力和預(yù)設(shè)壓力通過壓力傳感器標(biāo)定公式求取。表1中壓力差即為分離果柄過程中對果實產(chǎn)生的附加壓力,對應(yīng)果柄折斷瞬間壓力變化,其最大值為3.7 N,最小值為0.7 N,平均值為1.9 N。壓力大小不同可能與果實成熟度有關(guān),果實在成熟期果蒂離層易被折斷,相對應(yīng)壓力小。
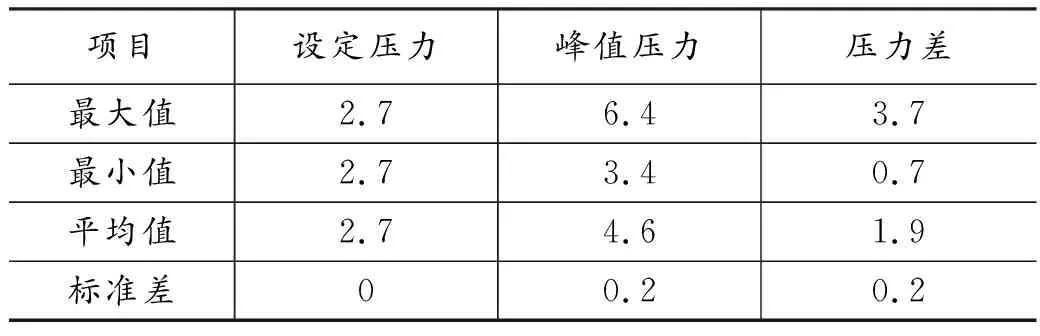
表1 果實樣本受力統(tǒng)計分析 單位:N
若果柄到轉(zhuǎn)軸中心的距離r取值范圍0.01~0.16 m,果柄至少受到的剪切力為8.125 N,完全符合使用要求。
經(jīng)過以上理論計算及分析,該設(shè)計的關(guān)鍵承載部件均無問題,實際模型樣機試驗與理論計算和分析相符。
如圖3所示,雙向伸縮桿采用的是2根旋向相反的梯形絲桿,末端螺母與其配合的套筒在周向定位后,可實現(xiàn)雙向伸縮。采用這種伸縮桿,在相同條件下,伸長縮短相同距離所需時間可節(jié)約50%,大大提高了機器的定位效率。

圖3 伸縮機構(gòu)
相關(guān)調(diào)查[3]研究發(fā)現(xiàn):矮化蘋果果園的果樹行距一般為3.0~4.0 m,果樹高為2.5~3.0 m,約90%以上的果實高度低于2.8 m,冠幅為2.0~2.5 m,枝下高為0.8~1.0 m,結(jié)合采摘對象矮化蘋果樹的生長狀況確定采摘機械手目標(biāo)水平工作空間為0~2.5 m,垂直工作空間為0.8~2.9 m,果實分布深度范圍為0~400 mm[4]。
在實際使用中為方便采摘人員攜帶使用,筆者所在的研究團隊通過調(diào)查研究發(fā)現(xiàn),以下尺寸更符合人體舒適度要求。作品設(shè)計外形尺寸為:1 200 mm(伸長后為2 000 mm)×200 mm×35 mm。
對于伸縮桿,還應(yīng)考慮到剛度問題。建立有限元模型,劃分網(wǎng)格,施加相應(yīng)受力,應(yīng)力云圖如圖4所示,可知桿完全伸出時,最大變形量為1.499 mm,小于本身屈服強度,對于定位也無較大影響。

圖4 伸縮桿的剛度分析
2.2 遠程控制
通過手機app連接末端控制裝置,控制電機的運動角度及伸縮桿的長度來調(diào)節(jié)剪口位置,當(dāng)剪切裝置到適當(dāng)位置后,果實進入剪切口,觸發(fā)剪口進行剪切,果子經(jīng)網(wǎng)兜落入緩沖軟管中。前端監(jiān)測裝置實時傳輸視頻信息給采摘者,協(xié)助采摘者檢查樹上未成熟果子是否有傷疤,剔除不合格的果子。當(dāng)電動伸縮桿沒電后,只需要更換手動伸縮桿,就可繼續(xù)進行果實采摘工作。電路圖如圖5所示。
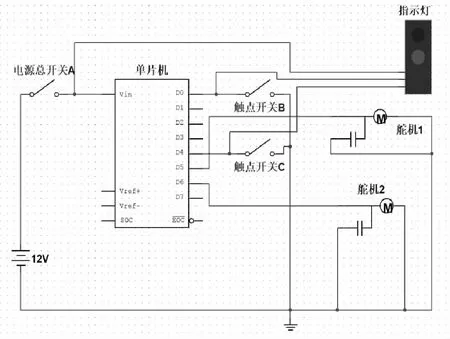
圖5 控制電路
2.3 電機的選型
為減輕整體的重量,采用的梯形絲桿為M6×1 000 mm。為傳遞足夠的扭矩,需要對電機進行選型,為延長續(xù)航時間,選擇使用可拆卸12 V大容量鋰電池,所以相應(yīng)的要選用12 V雙滾珠軸承775直流電機(空轉(zhuǎn)轉(zhuǎn)速11 000 r/min)提供動力。電動機驅(qū)動器型號選A4988電機驅(qū)動器,電動機細分?jǐn)?shù)設(shè)置為400,完成伸縮桿伸縮動作。直線步進電動機設(shè)定速率5.1~30.5 mm/s,可實現(xiàn)推力在75 N以上。配備減速比為1:30的齒輪組,電動機的最大扭矩可達6 N·m。
為了使伸縮桿電機及轉(zhuǎn)向舵機穩(wěn)定運行,防止抖動過大,采用的是基于PI調(diào)節(jié)器的單閉環(huán)自動調(diào)速系統(tǒng)。
3 創(chuàng)新點及應(yīng)用
3.1 創(chuàng)新點
1)通過前端智能識別器來識別果子是否成熟,是否有傷疤,剔除不合格的果子。
2)通過控制伸縮桿和舵機使鋼圈調(diào)整到相應(yīng)的位置,從而可以摘取各個角度的果子。
3)斜三角鋸齒形剪切刀片前端為圓弧形,方便快捷地剪切果子,避免損傷。
4)斜三角鋸齒形剪切刀片具有收攏作用,防止剪切時果實滑出。
5)對稱夾固裝置和對稱剪切刀片防止水果偏出。
6)緩沖軟管用于減小果子掉落時的速度,避免果子的損傷。
7)緩沖軟管可有效防止樹枝干擾、掛擋。
8)模塊化末端裝置,方便電動與手動伸縮桿切換。
9)模塊化可拆卸刀片,可安裝塑料夾具,方便剪切葡萄等水果。
10)果實夾固裝置內(nèi)側(cè)鋪設(shè)EVA泡棉板材質(zhì)柔性內(nèi)襯,減輕水果表皮損傷。
11)便攜背帶讓使用更加省力,提高工作人員工作時長。
12)采用基于PI調(diào)節(jié)器的單閉環(huán)自動調(diào)速系統(tǒng),使伸縮桿電機及轉(zhuǎn)向舵機穩(wěn)定運行,防抖動過大。
3.2 應(yīng)用效果
為驗證該采果器的使用效果,分別在蘋果園及橘園內(nèi)與工作人員同時采摘,將本設(shè)計與徒手采摘的效果進行了比較。
在橘園中,選擇了2棵高矮和果實密度都比較接近的樹,實驗組由一人單獨操作;對照組一人利用剪刀采摘,一人裝箱,高處的果實可以借助梯子類工具。以1 min為限,從果樹下方開始向樹冠方向采摘,一顆果樹采摘完成后,開始采摘下一棵果樹,每分鐘記錄1次2組的采摘情況,數(shù)據(jù)統(tǒng)計如圖6所示。
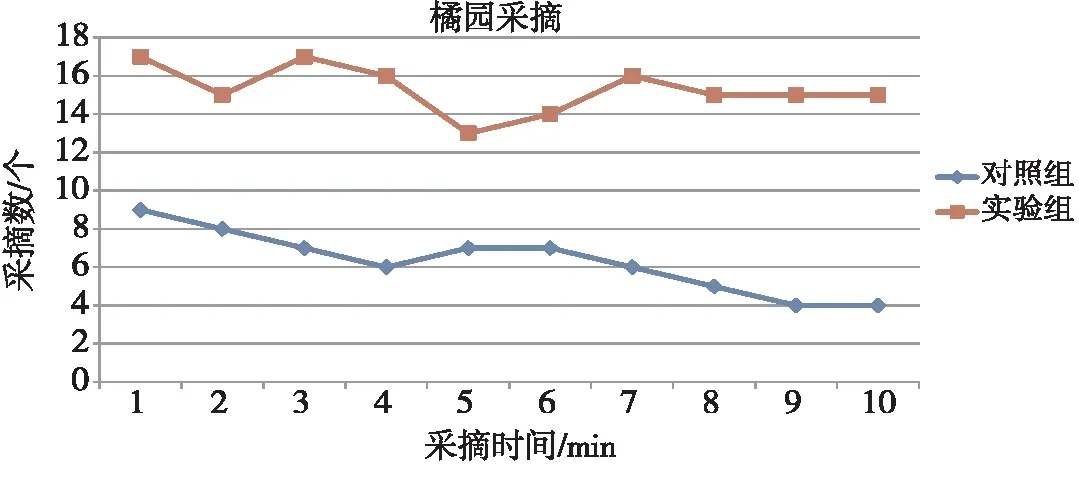
圖6 橘園采摘情況對比
在蘋果園中,蘋果的生長密度相比橘子稍小,樹的高度相對略高,人工采摘組仍可以借助登高工具來采摘樹冠上的蘋果。這組實驗中,仍采用前文所述規(guī)則。以1 min為限,從果樹下層向樹冠方向依次采摘,所得數(shù)據(jù)總結(jié)如圖7所示。
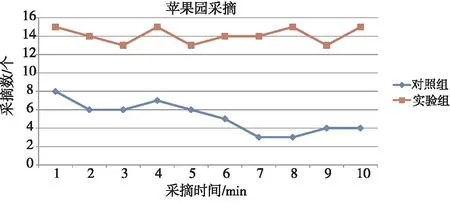
圖7 蘋果園采摘情況對比
通過比較,發(fā)現(xiàn)蘋果園和橘園的采摘效率不同主要是由于果樹的生長情況不同。在橘園中,橘子的生長高度較低,采摘器的主要優(yōu)勢在于省力、快捷。在蘋果園中,由于蘋果生長高度較高,采摘器的伸縮性得到了更好的應(yīng)用,而在采摘后期,因為蘋果的密度較小,尋找采摘目標(biāo)需要一些時問,這一點仍需要改進。將采摘器與人工操作相比較,采摘器的性能明顯占優(yōu),不僅操作迅速,而且省去了果實傳遞的過程,采摘也更加輕松。僅在1 min內(nèi),效率便大約是人工采摘的2.5倍。
