電動自行車鋰電池保護與在線監測系統設計*
2022-03-31 02:35:00李德明
廣西物理 2022年3期
李德明
(廣西師范大學物理科學與技術學院,廣西 桂林 541004)
0 引言
隨著互聯網+項目應用發展,電動車自行車也逐步進入智能化發展趨勢,電動自行車行業產品改進方向及技術提高必定是智能化。電動自行車智能化鋰電池的使用趨勢已經到來,面對新的電池技術和電機控制技術的發展,傳統電動自行車技術滿足不了客戶對新技術的渴望。鋰電池具有體積比、重量比能量高、單體電壓高,但存在電池容量不大、大電流放電性能弱、成本高、無法循環利用等問題。特別是在電動自行車上,鋰電池保護與控制系統不太成熟,替換原使用鉛酸電池車輛,與其儀表不一致等多種問題,使得鋰電池在電動自行車上的應用受到一定的阻力。因此完善鋰電池在電動自行車上的保護與控制系統尤為重要。
現階段大多數電動車鋰電池采用純硬件保護方案,直接使用鋰電池保護IC 進行保護,該方案中電路成本較低,但是純硬件保護方案中整個電池只有輸出與關閉2 個狀態。當電池被關閉時,不能直接定位到具體是某一單體鋰電池故障造成電池關閉,因此對鋰電池單體要求較高,使得鋰電池成本較高。電動自行車在行駛過程中,功率、電壓、電流、溫度等狀態的變化能夠反應出電動車故障的大致情況,比如電流異常,電機出現故障。因此實施在線監測將數據傳輸反饋給管理人員分析就較為重要,采用4G 無線通信方式把監測數據傳輸到手機APP 顯示,實現在線監測功能。另外我國北斗衛星導航系統作為我國科技發展的重要成果之一,已開始給中國和周邊地區提供定位導航服務,因此,引入北斗導航技術開發應用于電動自行車的定位系統并實現產業化,有助于電動自行車智能化發展。
本文設計基于stm32f103 單片機為主控制器的電動自行車鋰電池保護和在線監測系統,完成硬件電路設計和APP 軟件開發調試,并驗證該設計方案的可靠性。
1 系統設計原理
電動自行車用鋰電池保護和在線監測系統能夠有效地保障鋰電池的安全、穩定的運行,能在手機APP端在線實時監測電池運行狀態,并利用北斗定位系統實時查看電動車位置。系統設計將鋰電池保護與監控合二為一,在對電池進行保護的前提下實現按需輸出,實現對電動自行車電機控制的有效補充,提高鋰電池的使用效率,同時具有實時在線監測系統,確保電池運行安全可靠。該系統與電動車控制器相連,實時讀取控制器信息(控制信息、故障信息),并將此信息實時回傳給服務器進行數據處理,實現車況監測與控制。
系統設計由鋰電池保護模塊、鋰電池檢測模塊、鋰電池輸出控制模塊、BD/GPS 定位模塊、NB-IOT/4G網絡模塊、MCU 模塊和電源模塊組成。結構圖如下所示。
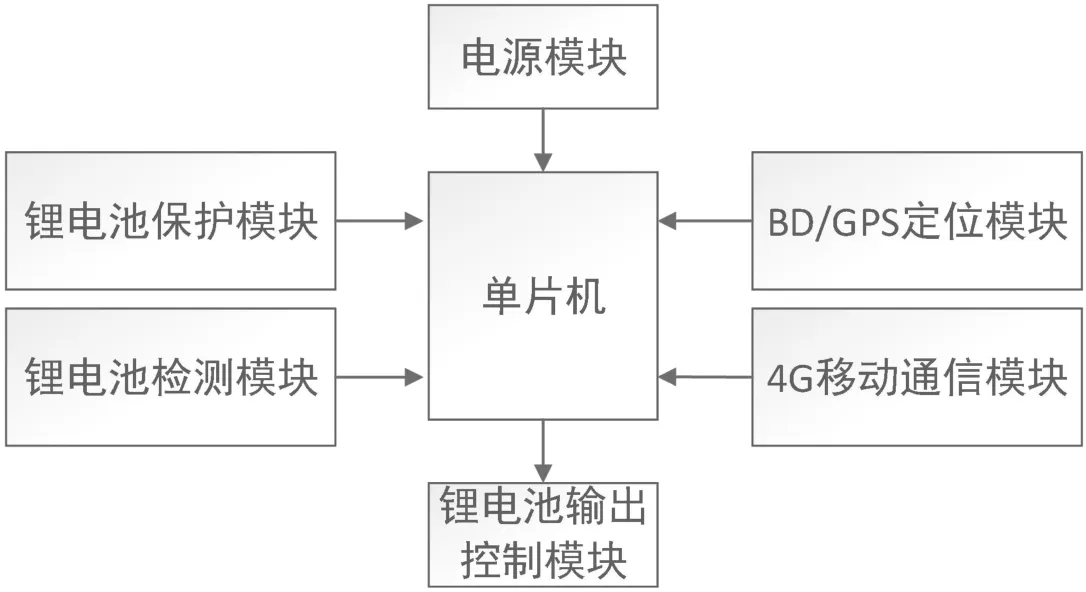
圖1 系統的總原理框圖
鋰電池保護模塊,具有過充保護、過放保護、過溫保護、過流保護、均衡保護等功能,對鋰電池進行實時保護。對充電和放電時的電壓、電流、溫度進行實時檢測,一旦出現過充、過放、過溫、過流等情況立即進入保護,停止充放電。鋰電池檢測模塊,可以監測每一個電池的電壓、電池組總電流、溫度,對鋰電池進行實時檢測。輸出控制模塊是根據負載需求進行功率的輸出,實時監測電量與負載情況,實現按需輸出。BD/GPS 定位模塊,實時獲取衛星數據,實現定位功能,并且將數據發送給單片機,單片機負責處理各個模塊之間的數據,進行處理后,通過NB-IOT/4G 移動網絡采用物聯網協議MQTT 模式進行數據通信,通過網絡發送給云服務器,云服務器完成對數據分析和存儲,手機APP 調取數據顯示,實現在線監測。
2 硬件電路設計分析
2.1 STM32 控制器電路設計
系統采用STM32 單片機作為主控制器,型號為STM32F103RBT6,芯片內部資源豐富,具有性價比高、功耗小等特點,適合嵌入式應用開發,STM32 主控制器的電路原理圖如圖2 所示[1]。
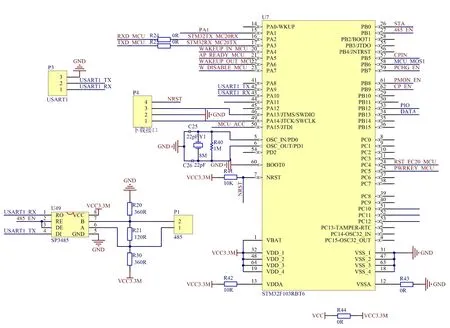
圖2 單片機模塊電路原理圖
單片機與各模塊都有連接關系,控制各模塊按照需求正常穩定工作。單片機采集保護板工作溫度是否正常,溫度檢測采用DS18B20設計。在測試時,DS18B20受熱區域與電池主體接觸,將其安裝在合適位置[2]。單片機模塊通過串行口PA9、PA10口與RS485芯片連接,實現與外圍擴展模塊連接,通過串口與BD/GPS定位模塊相連接,通過PA1-7口與4G移動通信模塊相連接,通過PB12、PB13口與鋰電池檢測模塊相連接,通過PB5、PB7、PB8、PB9口與鋰電池輸出控制模塊相連接。系統采用外部8MHZ晶振作為系統時鐘源,在晶振的輸入管腳以及輸出管腳加上電容實現晶振頻率穩定,STM32的程序下載方式主使用的是SWD接口下載的方式,只需要兩根接口即可實現下載,操作方便且電路簡單[1]。
2.2 系統電源電路設計
系統由鋰電池組供電,鋰電池組電壓較高,需要降壓才能給電路各模塊芯片供電使用,電路設計采用的降壓芯片是SL3036H,這是一款支持寬電壓輸入的開關降壓型DC-DC,芯片內部有大功率MOS 管,可承受輸入電壓超過120V 以上。SL3036H 輸出電流可達到1.5A 以上,并且還有功耗高、效率高、紋波小等特性。鋰電池組電壓經過SL3036H 降壓輸出4.2V 電壓給芯片供電,4.2V 電壓再經過AMS1117 穩壓芯片轉換為3.3V 給單片機等芯片供電,電路原理圖如圖3 所示[3]。
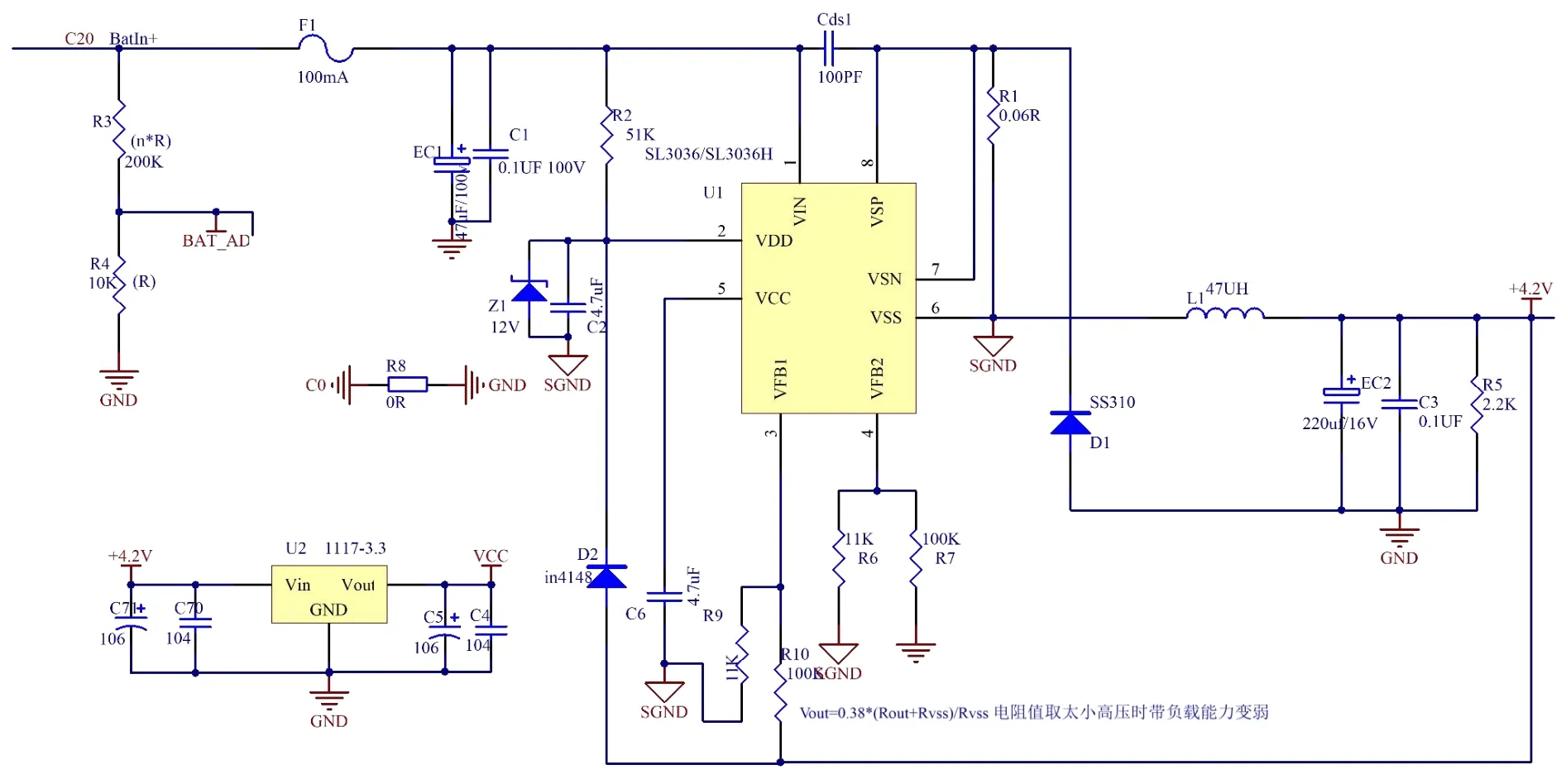
圖3 電源電路原理圖
2.3 鋰電池檢測模塊電路
鋰電池檢測模塊采用的檢測傳感器是DS2780E,用于測量可充電鋰離子和鋰離子聚合物電池的電壓、溫度和電流,并估算剩余電量[4]。該芯片內部有存儲單元,電池特性參數和應用參數存儲在片內EEPROM中,芯片根據電流溫度特性、放電速率、存儲電荷與應用參數對可用電量進行估算。估算電量值以mAh 和滿容量的百分比為單位提供[4]。DS2780E 與主控制器STM32F103 相連,通過單總線方式與主控制器STM32F103 通信實現數據傳輸。
鋰電池的放電曲線比較平緩,因此只依靠測量電池兩端電壓判斷電池容量的方法得不到準確值,但是DS2780E 芯片可以測量經過電池的電量,包括充進電量值、放出電量值和里面還有電量值,它都能檢測出來,通過單片機系統讀取數據就可以很精確的知道電池里的剩余電量了。鋰電池檢測電路原理圖如圖4 所示。
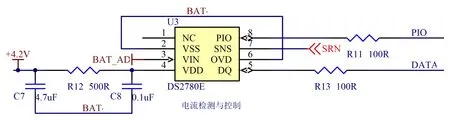
圖4 鋰電池檢測電路原理圖
2.4 鋰電池保護模塊電路
鋰電池保護模塊電路包括兩部分,分別是充電平衡控制電路和電池保護控制電路。
充電平衡控制電路采用HY2212 芯片,該芯片是鋰電池充電平衡芯片,其內置高電壓檢測電路和延遲電路,適用于多節電池組的單節鋰離子電池充電平衡控制的電平監視芯片。芯片過充檢測電壓是3.45V,過放檢測電壓是3.42V。充電平衡控制電路原理圖如圖5 所示,其中2N7002K 是平衡控制N-MOSFET 管,HY2212 輸出端OUT 輸出高電平時平衡控制有效,充電可正常進行。
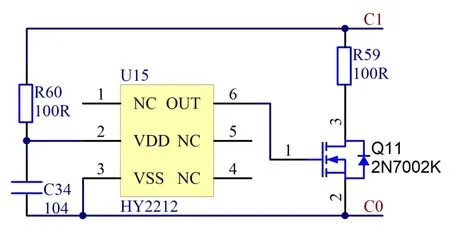
圖5 HY2212 電路原理圖
該集成電路持續監控VDD 和VSS 之間連接的C1 和C0 之間蓄電池電壓,以控制充電和放電。當電池電壓超過過充檢測電壓時,OUT 引腳電平由低變高控制N-MOSFET 管2N7002K 打開;或電池單元電壓低于過充釋放電壓,OUT 引腳輸出管腳輸出電平由高變低到控制N-MOSFET 關斷,這種狀態稱為“正常狀態”,充電時也可以正常運行。
鋰電池保護控制芯片采用HY2112,芯片內置高精度電壓檢測電路和延遲電路,可用于單節鋰電池的保護IC,適合于對單節鋰電池的過充電、過放電和過電流進行保護。電路原理圖如圖6 所示。集成電路監控VDD 引腳和VSS 引腳之間連接的電池電壓,以及CS 引腳和VSS 引腳之間的電壓差,以控制充放電。
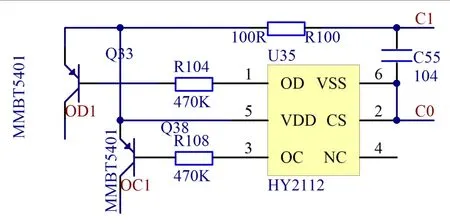
圖6 HY2112 電路原理圖
在正常工作狀態下充電時,電池電壓高于過充電檢測電壓,并且檢測持續時間超過過充電檢測延遲時間,HY2112 將關閉充電控制MOSFET 開關管停止充電,從而保護電池,這種情況稱為“過充保護狀態”[5]。當正常狀態下放電時,電池電壓低于過放電檢測電壓,且檢測持續時間超過過放電檢測延遲時間,HY2112將關閉放電控制MOSFET 開關管,停止放電,這種情況稱為“過放電保護狀態”[6]。HY2212 和HY2112芯片的控制輸出與bq76200 驅動器連接,根據HY2212 和HY2112 芯片檢測到的電池狀態去控制bq76200 驅動器的工作模式。
2.5 鋰電池輸出控制模塊電路
輸出控制選用bq76200 驅動器芯片,bq76200 高側N 通道FET 驅動器是一款電壓電池組前端充放電驅動器。高側保護避免系統接地中斷,還能確保電池組與主機系統之間進行連續的通信。該器件有一個額外的P 通道FET 控件,用于以低電流預充深度耗盡的電池,還有一個PACK+主機電壓監控器控件,用于感測PACK+電壓。獨立使能輸入能夠讓CHG 和DSG FET 單獨打開和關閉,為電池系統提供了更大的執行靈活性。即使當充放電功能電路停止工作,bq76200 也可以對電池進行不間斷監視。
bq76200 數字控制端口與主控制器STM32F103 連接,bq76200 與場效應管FDB2614 連接,FDB2614與電池組正極連接,從而由STM32F103 可以控制電池組的工作狀態。單片機處理器負責控制bq76200 驅動器芯片的工作使能端口,bq76200 驅動器芯片CP_EN 是充放電使能控制端口,PMON_EN 是內部工作監控使能控制端口,PCHG_EN 是場效應管預充電使能控制端口,提供在電池組中實施P 溝道MOSFET 開關管預充電路徑(電流限制路徑)的選項。HY2212 芯片和HY2112 芯片自動檢測電池狀態,根據監控到的狀態去控制bq76200 驅動器芯片連接的PCHG_EN 管腳實現充電使能控制,連接DSG_EN 管腳實現放電使能控制。bq76200 驅動器芯片的PACKDIV 管腳是電池組電壓輸出管腳,bq76200 驅動器芯片的PMON_EN 引腳啟用后,將把電池組正極電壓連接到PACKDIV 引腳上,該引腳連接到外部電阻分壓器,以降低電壓。降低后的電壓連接到單片機處理器的ADC 輸入電壓測量,單片機處理器可根據此電壓信息(電池組總電壓)檢測充電器工作情況或執行其他充電控制操作,如停止充電、停止放電使能等。
過溫保護單元和過流保護單元是通過單片機處理器控制輸出控制模塊的bq76200 驅動器芯片來實現的。當檢測模塊檢測到電池組溫度過高或者電流(電池組由電池單體串聯而成,電池單體電流即為電池組的總電流)過大時,單片機處理器控制bq76200 驅動器芯片的CP_EN 充放電使能控制端口和PCHG_EN 使能端口無效,從而達到過溫保護和過流保護的目的。輸出控制電路原理圖如圖7 所示。
3 系統測試驗證
3.1 電池保護控制板測試驗證
電動自行車鋰電池是一節一節串聯連接的,電池保護板通過接口監控每節電池的正負極電壓、電流、溫度等參數,在電池充放電時能監控鋰電池的總電壓和總電流,避免充放電電壓、電流工作異常,保障鋰電池正常工作。電池保護板和鋰電池連接示意圖和實物測試圖如圖8 所示。
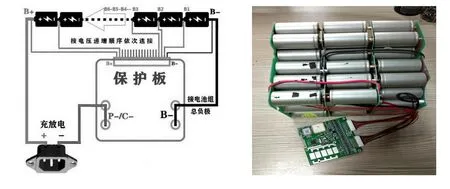
圖8 電池保護板和鋰電池連接示意圖和實物測試圖
經過對電池保護電路的調試和測試,驗證該保護控制電路系統能完成對電動車鋰電池的有效保護監控,系統對鋰電池的充電和放電時的電壓、電流、溫度能實時檢測,一旦出現過充、過放、過溫、過流等情況立即進入保護,停止充放電,同時可以實現監測單體鋰電池的電壓、溫度及內阻等運行參數,全面連續準確地監測鋰電池狀態,捕捉鋰電池的潛在故障,發送預警信號[7]。
3.2 電池保護系統在線監測測試驗證
在線監測功能是在手機端設計APP 軟件實現,無線通信采用型號為EC20 的4G 網絡通信模塊,EC20模塊兼容性能較好,可以實現EDGE 和GSM/GPRS 網絡通信,能保障在沒有3G 或4G 網絡的區域也能正常通信。EC20 模塊由主控制器STM32F103 控制工作狀態,模塊通過TXS0108E 自動雙向電壓轉換器與主控制器相連接,匹配兩者工作電壓,保障電路正常通信。
系統采用北斗導航定位模塊實現車輛實時定位、行駛數據分析、軌跡回放、電子圍欄、防盜等功能,同時緊密結合先進的計算機技術、精密測量技術和鋰電池特性,在APP 軟件設計中融合了鋰電池在線監測、分析、診斷功能。北斗定位模塊采用的型號為Air800 模塊,Air800 模塊由主控制器STM32F103 讀取和寫入相關數據,與STM32F103 通過串口連接通信實現數據傳輸。
利用北斗定位模塊與移動網絡數據傳輸模塊實現鋰電池保護系統在線監測功能,移動網絡采用物聯網協議MQTT 模式進行數據通信,開發手機APP 監控軟件實現數據實時傳輸,并經過多次修改編程,優化程序,取得理想的測試效果。在線監測測試圖如圖9 所示。
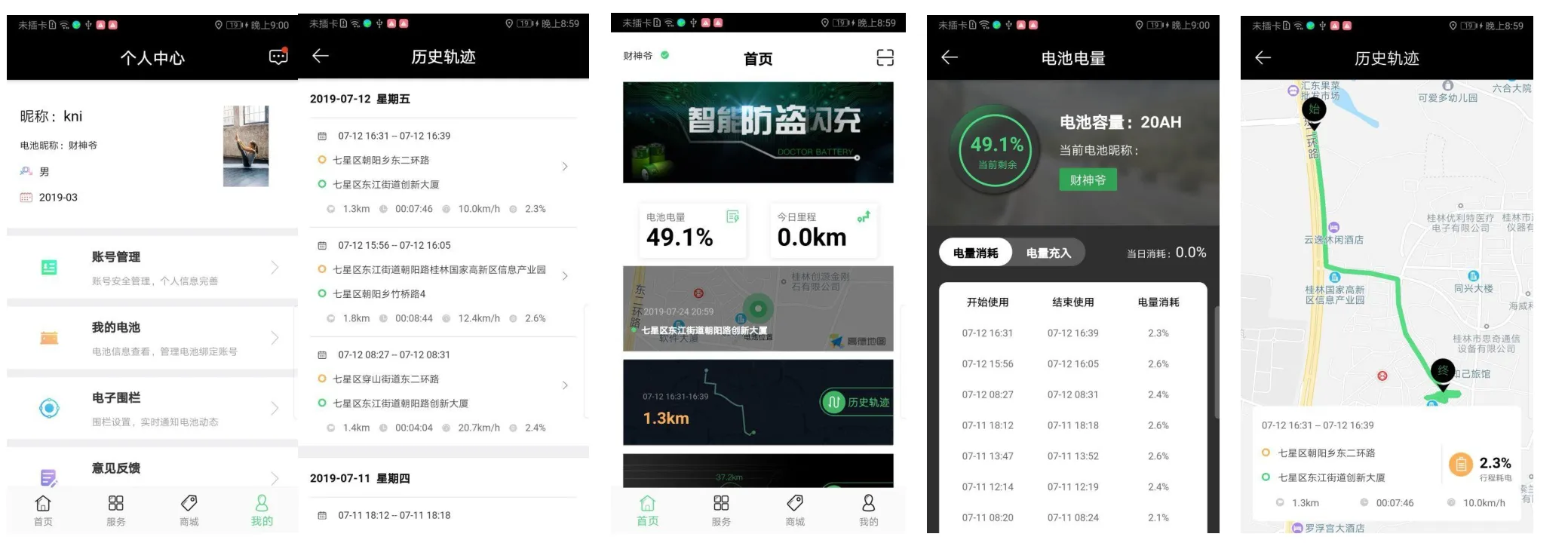
圖9 電池保護板在線監測APP 測試圖
4 結論
設計了一種基于STM32 單片機為主控制器的電動自行車鋰電池在線監測系統,實現對鋰電池相關工作參數的實時監測和實時保護,能夠穩定可靠地監測鋰電池狀態,捕捉鋰電池的潛在故障問題,及時作出保護措施,保證電動自行車使用安全。系統設計采用我國具有自主知識產權的北斗導航定位系統,實現電動自行車輛實施定位、行駛軌跡、電子圍欄防盜報警等功能,同時融合了鋰電池在線監測、分析、診斷功能,實現電池參數實時檢測和故障分析。測試結果證明該設計實現對鋰電池進行有效監測和安全保護,實現在線數據監測,具有較高的應用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
