高超聲速飛行器新型攻角約束反演控制
2022-04-07 12:32:28韋俊寶李海燕
系統(tǒng)工程與電子技術(shù) 2022年4期
關(guān)鍵詞:指令
韋俊寶, 李海燕, 李 靜
(海軍工程大學(xué)兵器工程學(xué)院, 湖北 武漢 430033)
0 引 言
由于高超聲速飛行器在軍事和民事方面具有巨大的應(yīng)用前景,引起了世界廣泛的關(guān)注。而飛行控制技術(shù)作為發(fā)展高超聲速飛行器的關(guān)鍵技術(shù),是實(shí)現(xiàn)飛行器跟蹤軌跡和穩(wěn)定飛行的基本保障,因此研究高超聲速飛行器的控制系統(tǒng)設(shè)計(jì)對(duì)于其發(fā)展具有十分重要的意義。
目前,關(guān)于高超聲速飛行器控制技術(shù)的研究已經(jīng)取得了一定的成果。反演法、動(dòng)態(tài)逆控制、滑模控制以及軌跡線性化等先進(jìn)控制方法在高超聲速飛行器控制器設(shè)計(jì)中均得到了應(yīng)用。其中,反演控制作為一種解決非線性和不確定控制問(wèn)題的有效控制技術(shù),通過(guò)將高超聲速飛行器動(dòng)力學(xué)分解為速度子系統(tǒng)和高度子系統(tǒng),可實(shí)現(xiàn)其控制器設(shè)計(jì)。
盡管高超聲速飛行器的反演控制器設(shè)計(jì)已經(jīng)取得了較大的進(jìn)展,但對(duì)于攻角約束問(wèn)題沒(méi)有足夠的重視。高超聲速飛行器在實(shí)際飛行中,為了保證超燃沖壓發(fā)動(dòng)機(jī)的正常工作,需要攻角幅值滿足一定的約束條件,否則會(huì)造成進(jìn)氣道不啟動(dòng)以及熱力壅塞等問(wèn)題,嚴(yán)重降低飛行性能。目前,大多文獻(xiàn)利用Barrier函數(shù)來(lái)處理攻角約束問(wèn)題。文獻(xiàn)[7-9]基于Barrier函數(shù)將跟蹤誤差約束在一定范圍內(nèi),卻忽略了對(duì)攻擊指令的限制,從而容易出現(xiàn)攻角能實(shí)現(xiàn)指令跟蹤卻超出約束范圍的問(wèn)題。文獻(xiàn)[10-13] 提出一種基于Barrier函數(shù)的自適應(yīng)反演控制方案,首先利用Barrier函數(shù)約束攻角跟蹤誤差,然后通過(guò)構(gòu)造飽和函數(shù)對(duì)攻角指令限幅,從而實(shí)現(xiàn)攻角約束。其中,文獻(xiàn)[10]利用微分跟蹤器估計(jì)限幅后攻角指令的一階導(dǎo)數(shù),卻忽略了該指令在飽和值處不可導(dǎo)的問(wèn)題。文獻(xiàn)[11]通過(guò)分別約束俯仰角和航跡傾角來(lái)處理攻擊約束問(wèn)題,設(shè)計(jì)流程較復(fù)雜。上述關(guān)于攻角約束的文獻(xiàn)中,所提出的控制方案需要假設(shè)攻角初始誤差滿足約束條件。在實(shí)際中,攻角初始誤差難以精確得到,并且該值可能過(guò)大;而通過(guò)擴(kuò)大約束范圍使得初始誤差滿足約束條件,則會(huì)降低攻角的跟蹤性能。另外,大多研究注重于攻角誤差的穩(wěn)態(tài)性能,忽略了其動(dòng)態(tài)性能。而當(dāng)跟蹤誤差具有良好的動(dòng)態(tài)性能時(shí),能夠使得攻角快速跟蹤上滿足約束條件的指令,不僅攻角約束問(wèn)題得到較好處理,而且能進(jìn)一步提高飛行器的機(jī)動(dòng)性能。
基于上述分析,本文針對(duì)考慮攻角約束的高超聲速飛行器控制問(wèn)題,提出一種受限指令濾波器與預(yù)設(shè)性能方法相結(jié)合的反演控制方案。與已有的研究工作不同,本文通過(guò)構(gòu)造受限指令濾波器對(duì)攻角指令限幅,保證攻角指令的有界性;并通過(guò)設(shè)定指令初始值,無(wú)需假設(shè)初始誤差滿足約束條件。在此基礎(chǔ)上,本文進(jìn)一步考慮攻角的跟蹤性能,采用預(yù)設(shè)性能方法對(duì)攻角跟蹤誤差進(jìn)行約束。所提出的方案在解決攻角約束問(wèn)題的同時(shí),能夠提高攻角跟蹤誤差的瞬態(tài)和穩(wěn)態(tài)性能。最后對(duì)該方案的有效性進(jìn)行了理論證明和仿真驗(yàn)證。
1 系統(tǒng)描述與預(yù)備知識(shí)
1.1 系統(tǒng)描述
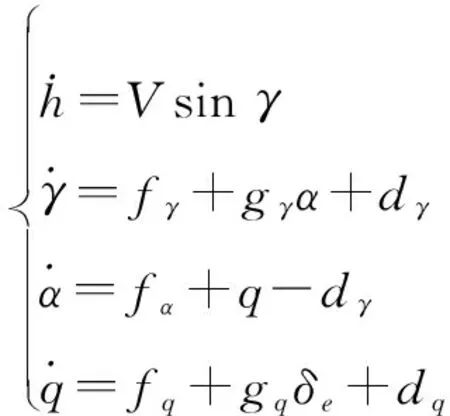
高超聲速飛行器縱向運(yùn)動(dòng)剛體模型為
(1)

(2)
(3)
(4)
(5)
式中:速度、高度、航跡傾角、攻角以及俯仰角速度為剛體狀態(tài)變量;為質(zhì)量;為重力加速度;為轉(zhuǎn)動(dòng)慣量;、、、分別為推力、阻力、升力以及俯仰力矩,可描述為
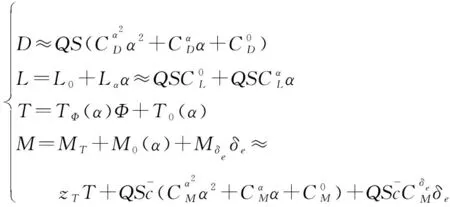
(6)

式(3)中的sin項(xiàng)數(shù)值遠(yuǎn)小于升力值,因此該項(xiàng)可以忽略。
系統(tǒng)模型的輸出為速度、高度;控制輸入為燃油當(dāng)量比、升降舵偏角。結(jié)合模型式(1)~式(5)與假設(shè)1可知,速度的變化主要受燃油當(dāng)量比控制;升降舵偏角通過(guò)直接控制俯仰角速率變化,進(jìn)而控制攻角、航跡傾角的變化,因此飛行器高度變化主要受控制。為了便于控制律設(shè)計(jì),通常情況下,模型式(1)~式(5)可分解為速度子系統(tǒng)和高度子系統(tǒng):

(7)
(8)
式中:
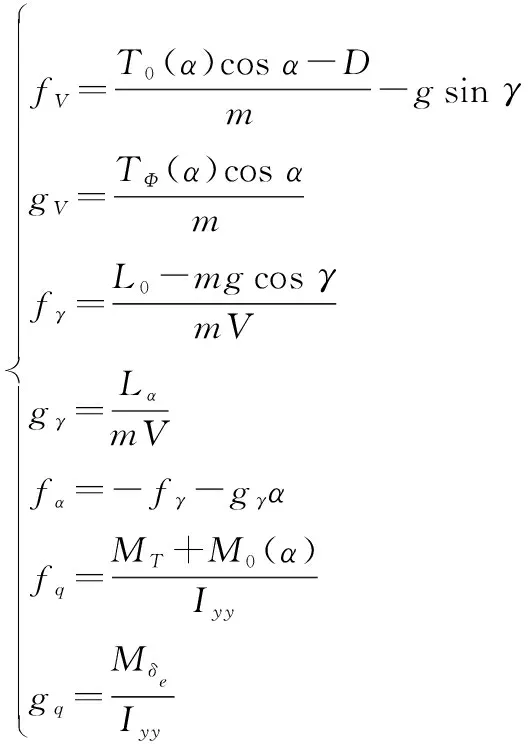
(=,,)為擾動(dòng)項(xiàng),包含外界干擾以及參數(shù)攝動(dòng),且有如下假設(shè)。
擾動(dòng)項(xiàng)(=,,)連續(xù)且一階導(dǎo)數(shù)有界。
1.2 預(yù)設(shè)性能
預(yù)設(shè)性能方法包括性能函數(shù)以及誤差變換,是指跟蹤誤差收斂在一個(gè)預(yù)先設(shè)定的任意小區(qū)域內(nèi)的同時(shí),跟蹤誤差的收斂速度和超調(diào)量均滿足預(yù)設(shè)條件,保證系統(tǒng)的瞬態(tài)和穩(wěn)態(tài)性能滿足預(yù)設(shè)要求。


(9)
為將不等式約束轉(zhuǎn)化為等式約束,建立等式

(10)
式中:為轉(zhuǎn)換誤差。定義轉(zhuǎn)換函數(shù)為
易知,()為光滑、嚴(yán)增可逆函數(shù),滿足:
(11)
進(jìn)一步,()的逆變換為

(12)
根據(jù)式(12),若始終有界,則不等式(9)成立,即系統(tǒng)跟蹤誤差不僅有界而且被限制在設(shè)定的范圍內(nèi),從而保證跟蹤誤差滿足預(yù)設(shè)的瞬態(tài)和穩(wěn)態(tài)性能要求。
1.3 線性擴(kuò)張狀態(tài)觀測(cè)器
考慮如下的一階不確定系統(tǒng):
(13)
式中:()為不確定項(xiàng),假設(shè)()連續(xù)且一階導(dǎo)數(shù)有界。針對(duì)該系統(tǒng),可以建立如下所示的線性擴(kuò)張狀態(tài)觀測(cè)器(linear extended state observer,LESO):
(14)


2 控制器設(shè)計(jì)
由于本文主要研究控制系統(tǒng)中的攻角約束問(wèn)題。考慮到速度子系統(tǒng)結(jié)構(gòu)較為簡(jiǎn)單、階數(shù)較少,通過(guò)設(shè)計(jì)動(dòng)態(tài)逆控制器可使其穩(wěn)定跟蹤指令,因此省略該子系統(tǒng)的控制器設(shè)計(jì)與仿真,而將研究重心放在含有攻角狀態(tài)的高度子系統(tǒng)中。
針對(duì)高度子系統(tǒng)式(8),進(jìn)行控制器設(shè)計(jì)。
首先定義高度跟蹤誤差=-,其中為高度指令。依據(jù)文獻(xiàn)[10],航跡傾角指令取為
(15)


(16)

下面進(jìn)行反演控制器設(shè)計(jì)。
定義航跡角誤差=-以及補(bǔ)償誤差:
=-
(17)
式中:為待設(shè)計(jì)的輔助變量。結(jié)合式(8),對(duì)式(17)求導(dǎo),得

(18)

(19)
設(shè)計(jì)虛擬控制律為

(20)

考慮攻角約束問(wèn)題,首先對(duì)虛擬控制律進(jìn)行限幅,并且為了保證限幅后指令的可導(dǎo)性,以便后續(xù)反演設(shè)計(jì)的順利進(jìn)行,構(gòu)造如下受限指令濾波器:
(21)
式中:、均為正參數(shù)。飽和函數(shù)sat(·)如下:
(22)
式中:常數(shù)>0、<0分別為攻角指令的上下限。取虛擬控制律=1。
式(21)中,取濾波器初值1(0)=(0),2(0)=-(+1)1(0)。目的是一方面使得攻角初始誤差為零,滿足特定的約束條件,無(wú)需假設(shè)初始誤差滿足約束條件。另一方面,通過(guò)賦予初始值,能夠保證虛擬指令滿足限幅條件,相關(guān)證明將在下文給出。
為了抵消攻角指令限幅造成的影響,設(shè)計(jì)如下輔助補(bǔ)償系統(tǒng):

(23)
將式(20)、式(23)代入式(19),得
(24)
定義攻角誤差=-并設(shè)定性能函數(shù)

(25)
(26)
本文通過(guò)采用預(yù)設(shè)性能方法,將攻角跟蹤誤差約束在預(yù)設(shè)范圍內(nèi)。與文獻(xiàn)[7-13]利用Barrier函數(shù)的方法相比,該方法在保證跟蹤誤差穩(wěn)態(tài)性能的同時(shí),能夠進(jìn)一步提高其動(dòng)態(tài)性能。
結(jié)合式(8),對(duì)式(26)求導(dǎo),得

(27)


(28)
設(shè)計(jì)虛擬控制律為

(29)
式中:、均為正參數(shù)。
將式(29)代入式(28),得

(30)

定義俯仰角誤差=-,結(jié)合式(8)對(duì)其求導(dǎo),得

(31)

(32)
設(shè)計(jì)系統(tǒng)控制律為

(33)

(34)
式中:、均為正參數(shù)。
結(jié)合式(33),式(32)變?yōu)?/p>

(35)
3 穩(wěn)定性分析
針對(duì)所設(shè)計(jì)的控制器,可得到如下定理。
系統(tǒng)模型式(8)在參數(shù)攝動(dòng)、外界干擾的情形下,基于假設(shè)1~假設(shè)3,采用式(33)所示的系統(tǒng)控制律,可得到如下結(jié)論:
(1) 高度子系統(tǒng)式(8)內(nèi)所有跟蹤誤差最終一致有界;

(1) 結(jié)論(1)證明
結(jié)合式(24)、式(28)以及式(35),將Lyapunov函數(shù)展開(kāi),得
(36)


(37)
另外,對(duì)于式(10),利用中值定理可得
(38)


(39)
結(jié)合式(37)和式(39),式(36)可以化簡(jiǎn)為
(40)


(41)
(42)
因此可以說(shuō)明有界,根據(jù)的定義可得到,,有界。根據(jù)第12節(jié),由有界可以得到有界且滿足約束條件;當(dāng)攻角指令退出飽和后,根據(jù)式(22),此時(shí)sat()=,則式(23)中→0,因此誤差有界。
(2) 結(jié)論(2)證明
將式(21)進(jìn)行變換,得到

(43)
由于≤sat()≤,則式(43)可改寫為

(44)
取=1,不等式(44)同時(shí)乘exp(),得

(45)
對(duì)不等式(45)積分,得

(46)
≤≤
(47)


(48)
結(jié)合式(47)、式(48),并且=+,顯然:

(49)
證畢
4 仿真分析
為驗(yàn)證本文提出的控制方案的有效性,以高超聲速飛行器縱向運(yùn)動(dòng)模型式(1)~式(5)為對(duì)象,利用第2節(jié)的控制方法進(jìn)行Matlab仿真。飛行器參數(shù)、氣動(dòng)參數(shù)取自文獻(xiàn)[14],如表1所示,仿真控制器參數(shù)如表2所示。
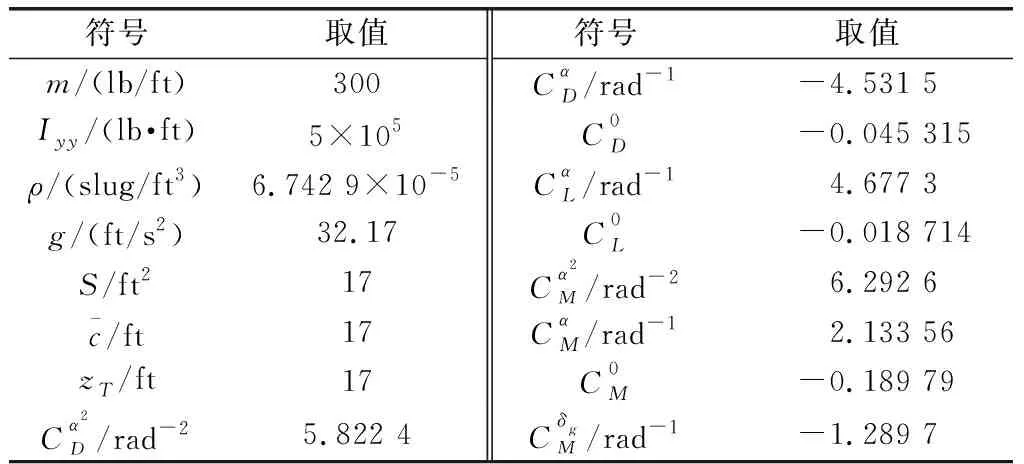
表1 高超聲速飛行器參數(shù)Table 1 Parameters of hypersonic vehicle
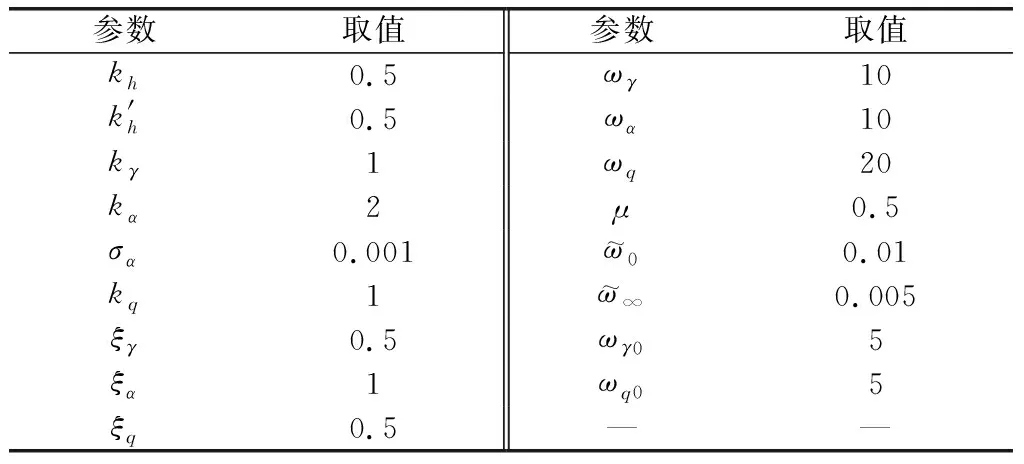
表2 控制器參數(shù)Table 2 Controller parameters
考慮系統(tǒng)參數(shù)攝動(dòng)為+30%;擾動(dòng)和包含的外界干擾分別設(shè)置為0002sin(02)和05sin(02);系統(tǒng)狀態(tài)初始值設(shè)置為=7 702 ft/s,=85 000 ft,=0°,=1515 3°,=0°/s;攻角約束區(qū)間設(shè)置為∈[-6°,8°],則飽和函數(shù)邊界值(單位為rad)分別設(shè)置為
高度階躍指令(單位為ft)設(shè)置為
并通過(guò)如下濾波器產(chǎn)生指令信號(hào):

(50)
針對(duì)本文提出的控制方案(記為Case1),選取文獻(xiàn)[10]所提出的控制方案(記為Case2)進(jìn)行對(duì)比仿真。其中Case2仿真相關(guān)參數(shù)如下。

仿真結(jié)果如圖1~圖7所示。由圖1~圖4可見(jiàn),Case1和Case2系統(tǒng)均能實(shí)現(xiàn)對(duì)指令信號(hào)的跟蹤。顯然,Case1的跟蹤精度更高,控制效果更佳。為了保證初始誤差滿足約束條件,Case2系統(tǒng)需要擴(kuò)大約束范圍,而這一方面導(dǎo)致了跟蹤誤差值較大,造成攻角跟蹤指令的效果不佳(見(jiàn)圖3和圖4);另一方面,使得攻角指令約束區(qū)間縮小,限幅后的攻角指令與理想指令之間誤差增大(見(jiàn)圖5),從而影響了整個(gè)高度子系統(tǒng)的跟蹤性能。雖然Case2系統(tǒng)能夠保證攻角始終滿足約束條件,但攻角指令區(qū)間十分受限,系統(tǒng)跟蹤性能較差,不利于實(shí)際應(yīng)用。而對(duì)于Case1系統(tǒng),顯然攻角能夠快速穩(wěn)定跟蹤上限幅后的指令的同時(shí),始終處于攻角約束區(qū)間內(nèi)(見(jiàn)圖3)。攻角約束問(wèn)題的解決,主要得益于以下兩點(diǎn):Case1無(wú)需考慮初始誤差對(duì)約束條件的影響,并且跟蹤誤差快速收斂到零并保持穩(wěn)定,顯然跟蹤誤差的瞬態(tài)和穩(wěn)態(tài)性能比Case2的更好(見(jiàn)圖4);另外,Case1的攻角指令始終處于攻角約束區(qū)間內(nèi)(見(jiàn)圖5),這也驗(yàn)證了所構(gòu)造的受限指令濾波器限幅指令的有效性。由圖7可見(jiàn),LESO對(duì)系統(tǒng)擾動(dòng)能實(shí)現(xiàn)快速有效的觀測(cè),說(shuō)明系統(tǒng)具有一定的抗干擾能力。綜上,本文設(shè)計(jì)的控制方案在考慮參數(shù)攝動(dòng)和外界干擾的情形下,使得系統(tǒng)實(shí)現(xiàn)了較好的指令跟蹤效果;并且保證攻角滿足約束條件的同時(shí),提高了攻角的跟蹤性能,較好地解決了攻角約束問(wèn)題。這一仿真結(jié)果驗(yàn)證了該控制方案的有效性。
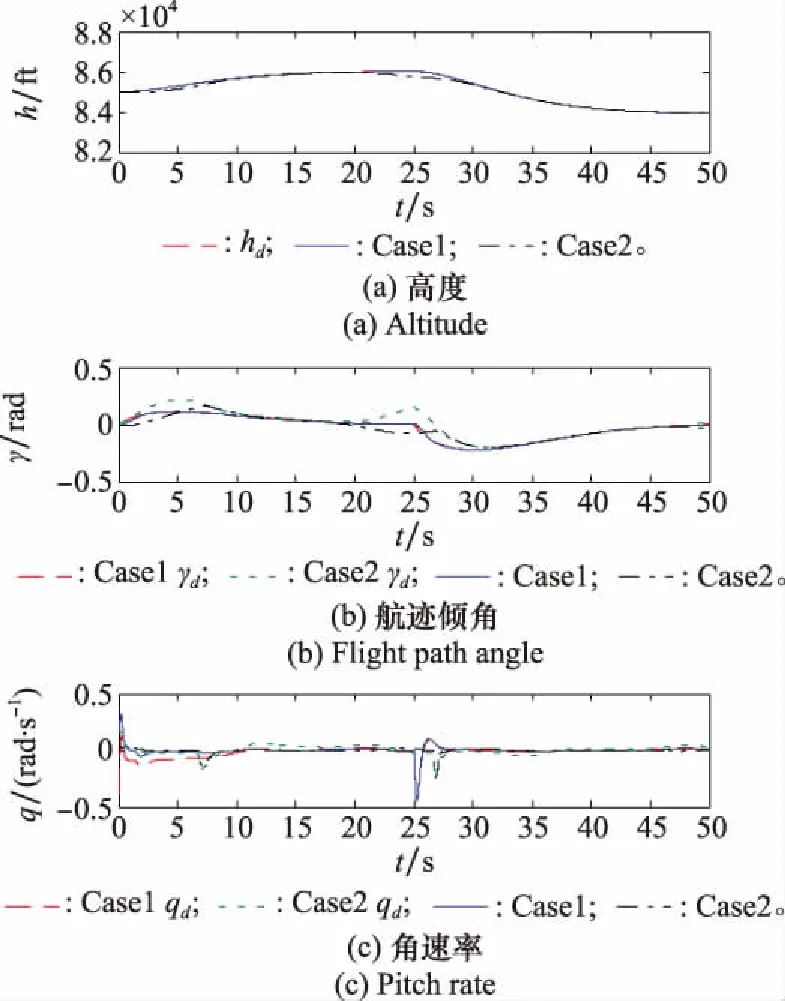
圖1 高度、航跡傾角及俯仰角速率跟蹤曲線Fig.1 Tracking curves of altitude、flight path angle and pitch rate
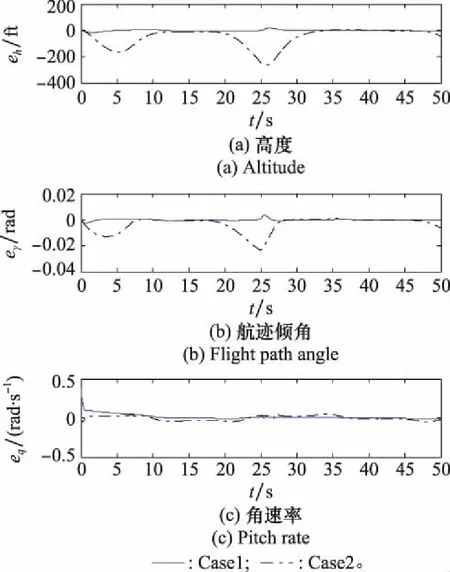
圖2 高度、航跡傾角及俯仰角速率跟蹤誤差曲線Fig.2 Tracking error curves of altitude, flight path angle and pitch rate
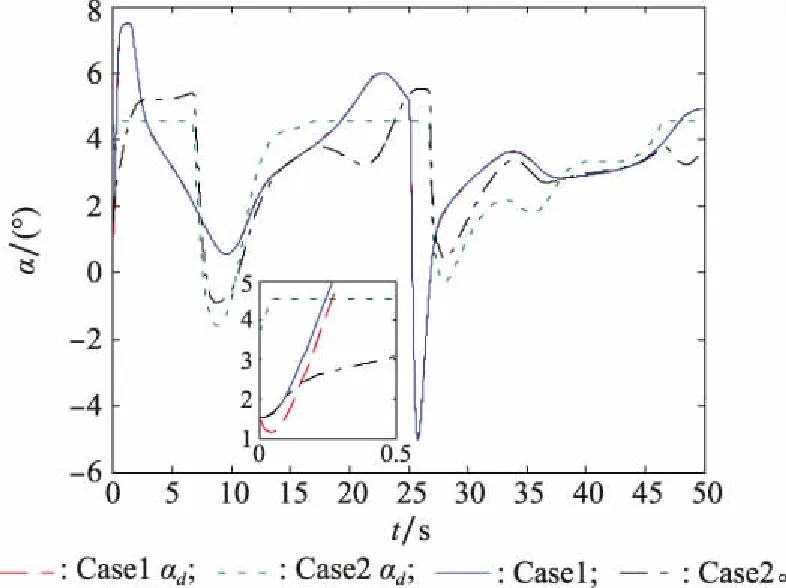
圖3 攻角跟蹤曲線Fig.3 Tracking curves of angle of attack
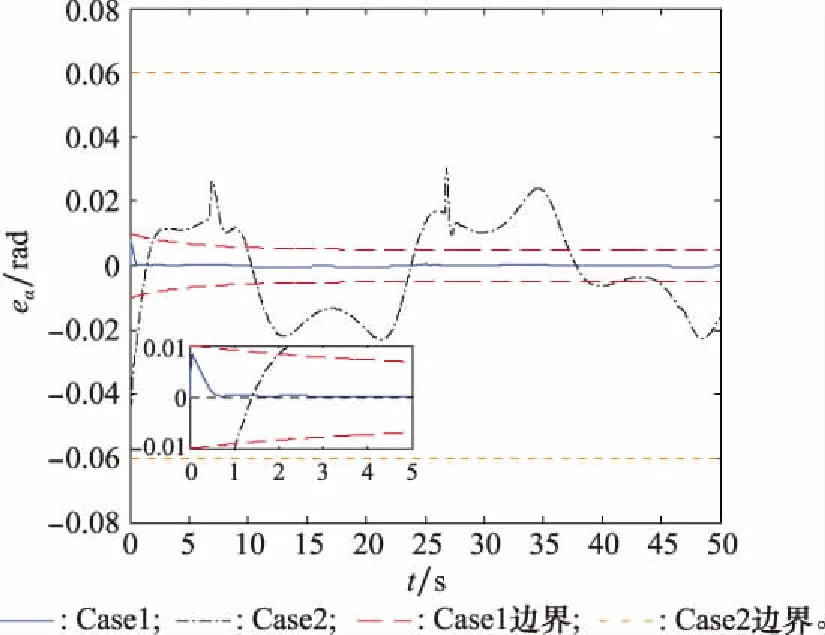
圖4 攻角跟蹤誤差曲線Fig.4 Tracking error curves of angle of attack
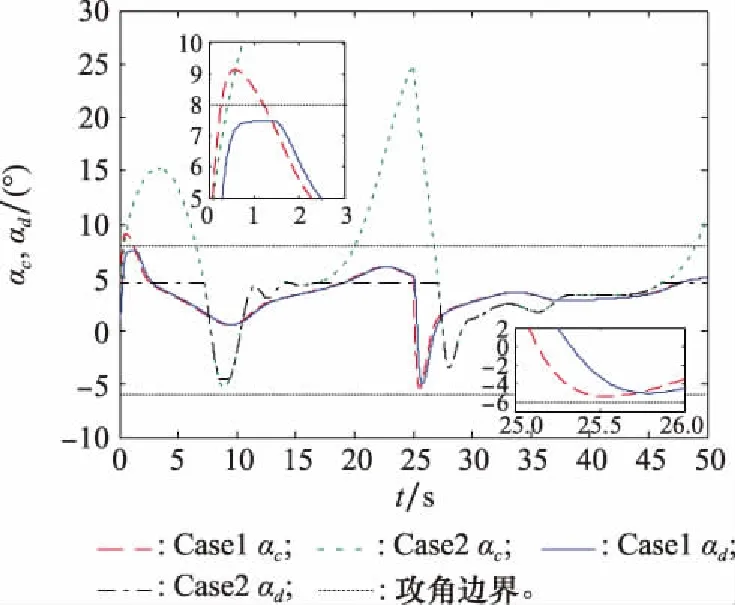
圖5 攻角指令限幅曲線Fig.5 Limited curves of angle of attack command
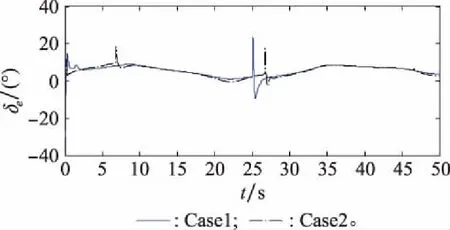
圖6 控制輸入曲線Fig.6 Curves of system input
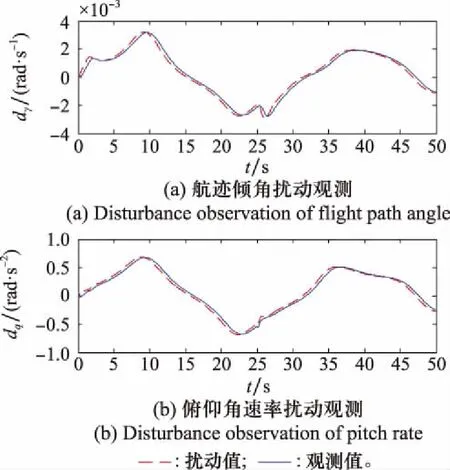
圖7 LESO觀測(cè)曲線Fig.7 Curves of LESO observation
5 結(jié) 論
針對(duì)考慮攻角約束的高超聲速飛行器控制問(wèn)題,本文提出一種受限指令濾波器與預(yù)設(shè)性能相結(jié)合的反演控制方案。該方案基于反演控制器設(shè)計(jì),通過(guò)構(gòu)造受限指令濾波器和采用預(yù)設(shè)性能方法,來(lái)分別約束攻角指令和跟蹤誤差,從而解決攻角約束問(wèn)題,并從理論上完成了證明。最后通過(guò)仿真驗(yàn)證,該方案能夠提供良好的跟蹤性能,攻角始終滿足約束條件,攻角跟蹤誤差滿足預(yù)設(shè)的瞬態(tài)和穩(wěn)態(tài)性能要求。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
時(shí)代農(nóng)機(jī)(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27