超燃沖壓發(fā)動機仿真:從數(shù)值飛行到數(shù)智飛行1)
2022-04-07 06:56:02孫明波汪洪波王成龍
力學學報 2022年3期
孫明波 安 彬 汪洪波 王成龍
(國防科技大學高超聲速沖壓發(fā)動機技術(shù)重點實驗室,長沙 410073)
引言
當前吸氣式高超聲速飛行器技術(shù)已成為世界各大國優(yōu)先發(fā)展的顛覆性技術(shù),其核心是超燃沖壓發(fā)動機技術(shù).出于對全球快速軍事力量投送和低成本空間運輸?shù)确矫娴钠惹行枨?更大尺度、更寬范圍、更長航程的可重復使用超燃沖壓發(fā)動機成為研究熱點.傳統(tǒng)超燃沖壓發(fā)動機的設(shè)計與驗證主要依賴大量各類試驗.但是發(fā)動機尺度增大、試驗范圍拓寬以及試驗時間加長使得試驗成本不斷攀升,聯(lián)同較長的試驗周期一起限制了發(fā)動機方案的快速迭代.
近年來,數(shù)值仿真在超燃沖壓發(fā)動機設(shè)計中的作用越來越大.隨著湍流模型[1]和燃燒化學反應機理[2]等物理模型的快速發(fā)展、數(shù)值計算方法精度的不斷提高[3]和計算能力的指數(shù)型增長[4],基于內(nèi)外流一體化的超燃沖壓發(fā)動機數(shù)值飛行(即采用數(shù)值計算揭示發(fā)動機在整個飛行彈道內(nèi)的工作狀態(tài))已經(jīng)開始應用于工程實際.超燃沖壓發(fā)動機同時涉及強烈的熱、流、固多物理場耦合問題[5-6],長航時工作面臨嚴峻的熱安全問題,廣義的數(shù)值飛行技術(shù)需要疊加多物理場,對發(fā)動機熱結(jié)構(gòu)的可靠性做出評估.
當前人工智能技術(shù)方興未艾,人工智能技術(shù)雖然主要基于計算機科學,但是相關(guān)算法的進步和“TensorFlow”等開源平臺的普及使人工智能迅速滲透至其他領(lǐng)域.目前人工智能已在圖像識別[7]、語言處理[8]和無人駕駛[9]等領(lǐng)域取得令人矚目的成就.在數(shù)值計算領(lǐng)域,人工智能則被應用于湍流建模、流動特征提取和求解偏微分方程等方面[10-11],表現(xiàn)出巨大的發(fā)展?jié)摿?基于當前的研究背景,本文簡要闡述了超燃沖壓發(fā)動機數(shù)值飛行的內(nèi)涵,在數(shù)值飛行的基礎(chǔ)上提出“數(shù)智飛行”這一概念,并對其內(nèi)涵和發(fā)展重點進行梳理.
1 超燃沖壓發(fā)動機數(shù)值飛行的內(nèi)涵
超燃沖壓發(fā)動機數(shù)值飛行旨在利用內(nèi)外流一體化仿真研究發(fā)動機從啟動到完成各種工況到最后關(guān)機的全過程,并以此分析和評估發(fā)動機性能,指導發(fā)動機優(yōu)化設(shè)計.目前,數(shù)值飛行主要關(guān)注與發(fā)動機性能相關(guān)的流動燃燒過程.在未來幾年,發(fā)動機仿真可以進一步考慮傳熱過程和結(jié)構(gòu)形變等現(xiàn)象,實現(xiàn)疊加多物理場的廣義數(shù)值飛行.
1.1 基于內(nèi)外流一體化仿真的數(shù)值飛行
高超聲速飛行器的一個典型特點是必須要將發(fā)動機和機體耦合設(shè)計,超燃沖壓發(fā)動機的推力、工作穩(wěn)定性和性能與來流特性密切相關(guān),而且對來流特性的變化非常敏感,而來流特性取決于飛行器的高度、速度和姿態(tài),在飛行器大空域、寬速域和高機動飛行時尤為突出,發(fā)動機的特性又會影響到飛行器的飛行狀態(tài).如圖1 所示,進氣道與飛行器前體一體化設(shè)計、高反壓下進氣道-隔離段-燃燒室相互作用以及尾噴管和飛行器后體的高度融合進一步加強了內(nèi)外流的耦合作用.

圖1 超燃沖壓發(fā)動機示意圖[12]Fig.1 Scramjet engine concept[12]
傳統(tǒng)航空航天發(fā)動機/飛行器的內(nèi)外流場研究是相對獨立的,通常拆分為不同部件分別研究.從研究目的來看,對外部流場的研究側(cè)重于優(yōu)化飛行器的氣動特性,提高飛行器升力系數(shù)和阻力系數(shù)等關(guān)鍵參數(shù).對發(fā)動機內(nèi)部流場的研究則集中在提升發(fā)動機的推力和比沖.由于超燃沖壓發(fā)動機的進排氣過程與燃燒過程緊密耦合,內(nèi)外流解耦的研究模式無法反映發(fā)動機的實際工作過程.為實現(xiàn)寬范圍的進/發(fā)/排最優(yōu)匹配,充分挖掘發(fā)動機的潛在性能,必須開展發(fā)動機內(nèi)外流一體化仿真,基于彈道的全過程飛行器/發(fā)動機數(shù)值飛行技術(shù)目前逐步得到應用.得益于較為成熟的數(shù)值方法和高性能計算平臺,超燃沖壓發(fā)動機內(nèi)外流一體化仿真已獲得比較豐富的成果.根據(jù)仿真的對象和手段,目前有三類實現(xiàn)內(nèi)外流一體化仿真的方法,其典型結(jié)果如圖2 所示.

圖2 超燃沖壓發(fā)動機內(nèi)外流一體化仿真典型結(jié)果Fig.2 Representative numerical results of internal and external coupling flow
第一類僅針對無反應流場或部分發(fā)動機部件開展仿真.例如采用參數(shù)化的二維仿真優(yōu)化高超聲速飛行器整體構(gòu)型[13];通過大渦模擬研究進氣道與隔離段相互作用,揭示內(nèi)外流耦合作用導致的復雜流場結(jié)構(gòu)和流場振蕩的誘因[14];利用高保真的數(shù)值計算手段獲得全面的發(fā)動機內(nèi)外流場數(shù)據(jù)[15],實現(xiàn)發(fā)動機各部件融合設(shè)計.
第二類對部分發(fā)動機部件開展仿真,對其余部件簡化處理(建模或減少計算維度).何良俊等[16]采用二維數(shù)值計算預測NAL 發(fā)動機進氣道和尾噴管流場,通過準一維流方法獲得燃燒室反應流場.陳兵等[18]采用類似的方法研究了內(nèi)外流耦合對發(fā)動機推力的影響.上述兩類研究成果初步揭示了內(nèi)外流的耦合特性,但是未能實現(xiàn)真實全流場模擬.
第三類對發(fā)動機所有部件開展三維仿真,獲得全部無反應/反應流場.該方法已被用于考察燃料噴注方案對發(fā)動機燃燒效率和推力的影響[17]、進氣道泄壓孔對發(fā)動機各部件流量的調(diào)節(jié)作用和燃燒室工作狀態(tài)對外流場的反作用[19],進一步證明了內(nèi)外流一體化仿真在提升發(fā)動機性能方面的重要作用.
基于當前技術(shù),結(jié)合高超聲速流場的特點開發(fā)高效率、高集成度的仿真平臺是內(nèi)外流一體化仿真的發(fā)展趨勢.如圖3 所示,國防科技大學基于CPU/GPU 異構(gòu)體系開發(fā)了高超聲速飛行器內(nèi)外流一體化高效并行計算平臺,并采用類X-51 A 飛行器進行驗證[20].準確、高效的算法和GPU 的強大算力顯著降低了開展內(nèi)外流一體化仿真的門檻.中國空氣動力研究與發(fā)展中心開發(fā)了高超聲速內(nèi)外流耦合數(shù)值模擬軟件(AHL3 D),建立了三級數(shù)值預測體系[21].在設(shè)計選型階段利用工程算法和一維模型快速估算發(fā)動機關(guān)鍵參數(shù).在詳細設(shè)計階段采用三維外流與二維內(nèi)流相結(jié)合的方法優(yōu)化發(fā)動機設(shè)計.在性能分析階段通過三維內(nèi)外流一體化仿真考察發(fā)動機綜合性能.

圖3 兩種內(nèi)外流一體化仿真平臺Fig.3 Two software platforms for numerical simulation of internal and external coupling flow
1.2 疊加多物理場的廣義數(shù)值飛行
長航時、可重復的超燃沖壓發(fā)動機面臨嚴峻的熱安全問題,這是區(qū)別于其他類型發(fā)動機的一個典型特征.長時間超高溫、強振動環(huán)境,尤其是重復使用要求熱界面保持完整、結(jié)構(gòu)內(nèi)部無疲勞損傷,這些特點對發(fā)動機燃燒、傳熱、結(jié)構(gòu)建模分析提出了更高的要求.如圖4 所示,在高超聲速飛行條件下,超燃沖壓發(fā)動機中氣流速度快、總溫高,燃燒室燃燒溫度高,壁面冷卻可用流量小,其帶來的力/熱載荷以及發(fā)動機內(nèi)部的高溫氧化環(huán)境可能使進氣道壓縮面和燃燒室壁面等結(jié)構(gòu)發(fā)生顯著形變和振動,壁面可能超溫并產(chǎn)生防熱涂層剝蝕、材料燒蝕等問題[5-6].壁面熱流與壁面主動冷卻通道內(nèi)的燃油反應裂解甚至結(jié)焦過程相互影響,也會反向影響發(fā)動機燃燒性能.極端力/熱載荷的持續(xù)作用(約1000 s)和結(jié)構(gòu)高溫下的振動可能使材料發(fā)生疲勞、損傷、失效,影響結(jié)構(gòu)熱匹配和熱密封,乃至破壞發(fā)動機結(jié)構(gòu)完整性.

圖4 超燃沖壓發(fā)動機中的多物理場耦合Fig.4 Multi-physics coupling in a scramjet engine
數(shù)值飛行還需要對結(jié)構(gòu)強度、熱氣動彈性及其導致的長時間振動疲勞問題進行評估.薄壁結(jié)構(gòu)和新型材料的廣泛應用,以及防隔熱/承載一體化設(shè)計進一步加強了熱、流、固多物理場的非線性耦合[22].可以說,發(fā)動機的高效、安全工作強烈依賴于流動、燃燒和結(jié)構(gòu)的合理設(shè)計與有效匹配.有必要在內(nèi)外流一體化仿真的基礎(chǔ)上同步求解傳熱過程、結(jié)構(gòu)變形和結(jié)構(gòu)非穩(wěn)態(tài)響應等多物理場,揭示結(jié)構(gòu)和熱防護系統(tǒng)可能出現(xiàn)的損傷和破壞,支撐發(fā)動機熱傳遞調(diào)控和設(shè)計,此即廣義數(shù)值飛行.
長期的研究使人們對多物理場耦合問題的認識日趨深入,建立了一系列關(guān)于氣動力、氣動熱和非線性結(jié)構(gòu)等子學科的物理模型,根據(jù)物理場的耦合關(guān)系構(gòu)造了強/弱耦合、松/緊耦合、快尺度/慢尺度耦合和單向/雙向耦合等耦合架構(gòu).桂業(yè)偉等[23]和王梓伊等[24]對相關(guān)算法進行了深入的分析和討論.由于超燃沖壓發(fā)動機中物理場具有顯著的多尺度和非線性特征,實現(xiàn)全彈道多物理場仿真需要針對不同部件和飛行狀態(tài)選取不同物理模型和耦合架構(gòu).
在工程應用方面,當前的多物理場耦合求解算法已經(jīng)能夠為發(fā)動機各部件的設(shè)計提供較為全面的數(shù)據(jù).對氣動熱的分析表明,在高飛行馬赫數(shù)下,飛行器表面熱流的峰值可達1 MW/m2量級,不同部位的熱流可相差數(shù)個數(shù)量級[25].微小的結(jié)構(gòu)變形即可導致局部熱流的劇烈變化[26].力/熱載荷的綜合作用可導致進氣道前緣上翹,并進一步導致進氣道捕獲流量上升和流場品質(zhì)顯著下降[27].對燃燒室中再生冷卻的研究表明,煤油裂解吸熱的冷卻效果優(yōu)于流動換熱[28],基于煤油的再生冷卻系統(tǒng)能夠使燃燒室壁面溫度降低至燃氣平均溫度的一半.
目前鮮見發(fā)動機燃燒、力、熱耦合的廣義數(shù)值飛行計算結(jié)果的報道,但針對高超聲速飛行器開展無反應內(nèi)外流和機體結(jié)構(gòu)力熱耦合分析,已經(jīng)被成功應用于工程實際.典型的例子是波音公司針對TX-V 高超聲速飛行器開展了全面的內(nèi)外流一體化仿真和多物理場耦合求解[29-30],極大支撐了TXV 飛行器的方案設(shè)計.
在研究的第一階段,以“Boeing Manta 2025”飛行器為參考確定TX-V 飛行器的基準構(gòu)型.TX-V 飛行器的巡航高度、馬赫數(shù)和時間分別為42 km,7和2000 s,全彈道飛行時間約3600 s.如圖5 所示,在飛行馬赫數(shù)7 條件下,TX-V 面臨嚴酷的熱載荷和復雜的氣動力.對飛行器傳熱過程和結(jié)構(gòu)變形的分析表明,基準構(gòu)型的TX-V 飛行器無法收斂.需要優(yōu)化飛行器結(jié)構(gòu)并將材料的熱膨脹系數(shù)降低60%才能實現(xiàn)飛行器設(shè)計的封閉.這說明極高的熱載荷不僅需要先進的材料,還需要在設(shè)計方法上取得突破.在主要由金屬構(gòu)成的飛行器中有必要采用允許較大熱變形的柔性結(jié)構(gòu).

圖5 TX-V 結(jié)構(gòu)響應與壽命預測[30]Fig.5 Structural response and life prediction of TX-V[30]
在研究的第二階段,在飛行器上選取四個典型位置考察全彈道飛行時力/熱/聲載荷對鑲板結(jié)構(gòu)的影響.以第一階段獲得的數(shù)據(jù)作為各鑲板結(jié)構(gòu)的邊界條件.鑲板1 (Panel 1)位于機體上表面靠近燃燒室的位置,鑲板2 (Panel 2)位于機體的腹部,鑲板3(Panel 3)位于機體上壁面油箱的上方,鑲板4 (Panel 4)在機翼的下壁面,這些位置承受的溫度、聲載荷和機械載荷各有差異.采用相同的研究模式分析各鑲板結(jié)構(gòu)對力/熱/聲載荷的響應.具體研究內(nèi)容包括傳熱過程、靜力學分析、動力學分析和疲勞失效分析等.相關(guān)研究結(jié)果對飛行器各模塊的優(yōu)化設(shè)計具有重要的參考價值.波音公司的這些工作驗證了多物理場求解的可行性,雖然還有很多未開展的計算(比如未實現(xiàn)多物理場雙向耦合求解、未模擬材料的變形與疲勞等),但已經(jīng)初步展現(xiàn)出未來多場耦合設(shè)計的前景,這對于發(fā)展高保真度的發(fā)動機廣義數(shù)值飛行技術(shù)提供了對照和參考.
2 從數(shù)值飛行到數(shù)智飛行
近年來人工智能技術(shù)的迅猛發(fā)展和對傳統(tǒng)領(lǐng)域的賦能作用,為全面提升發(fā)動機數(shù)值飛行的能力、實現(xiàn)智能化數(shù)值飛行提供了可能.從數(shù)值飛行到數(shù)智飛行,將是數(shù)值計算的一次變革和飛躍.首先是全面改善原有數(shù)值飛行對應的物理模型、數(shù)值計算方法和計算能力等方面的限制,使數(shù)值飛行技術(shù)更準確、更精確以及更迅速的應用于發(fā)動機方案的快速迭代.以人工智能技術(shù)和數(shù)值飛行的海量數(shù)據(jù)為基礎(chǔ),進一步構(gòu)建智能賦能的數(shù)字孿生發(fā)動機,可以實現(xiàn)發(fā)動機研制模式的變革.
2.1 智能化數(shù)值飛行
人工智能技術(shù)目前已滲透至數(shù)值飛行的各個環(huán)節(jié),其對數(shù)值飛行技術(shù)的優(yōu)化和提升作用已得到初步驗證.盡管相關(guān)研究尚未形成完整體系,數(shù)值飛行的智能化趨勢已十分明朗.數(shù)值飛行智能化的內(nèi)涵主要包括網(wǎng)格的智能化生成與自適應、智能化的數(shù)值計算方法、高保真的物理模型和高效的數(shù)據(jù)處理與知識挖掘.
2.1.1 網(wǎng)格的智能化生成與自適應
網(wǎng)格是連接研究對象和數(shù)值飛行算法的橋梁,其生成速度和質(zhì)量直接影響數(shù)值飛行的效率和精度.復雜網(wǎng)格的生成和優(yōu)化嚴重依賴研究人員的經(jīng)驗.超燃沖壓發(fā)動機復雜的內(nèi)外結(jié)構(gòu)和多物理場的緊密耦合可能給網(wǎng)格的生成與自適應帶來新的嚴峻挑戰(zhàn).當前網(wǎng)格生成的自動化水平和質(zhì)量可能無法滿足廣義數(shù)值飛行的需求.
自20 世紀90 年代起,神經(jīng)網(wǎng)絡即被引入到網(wǎng)格生成領(lǐng)域.文獻[31]采用神經(jīng)網(wǎng)絡預測網(wǎng)格密度.將網(wǎng)格密度輸入“Kohonen”神經(jīng)網(wǎng)絡后生成最終的網(wǎng)格.文獻[32-33]基于名為Let-It-Grow 的神經(jīng)網(wǎng)絡開發(fā)了一種自動網(wǎng)格生成器.該方法以稀疏網(wǎng)格為基礎(chǔ),通過神經(jīng)網(wǎng)絡逐漸將網(wǎng)格節(jié)點增加到用戶設(shè)定的數(shù)值.
近年來人工智能輔助的網(wǎng)格生成與自適應再次成為研究熱點.Zhang 等[34]將計算域的幾何構(gòu)型、偏微分方程的參數(shù)和邊界條件輸入神經(jīng)網(wǎng)絡,由神經(jīng)網(wǎng)絡直接生成接近最優(yōu)的非均勻網(wǎng)格.王年華等[35]采用神經(jīng)網(wǎng)絡提高陣面推進法的效率,在不降低網(wǎng)格質(zhì)量的前提下將生成二維非結(jié)構(gòu)網(wǎng)格的時間縮短了近30%.如圖6 所示,在網(wǎng)格自適應領(lǐng)域,文獻[36]采用卷積神經(jīng)網(wǎng)絡識別邊界層位置,判斷是否需要調(diào)整網(wǎng)格密度.上述成果具有重要的啟發(fā)意義,但是使人工智能在網(wǎng)格生成和自適應領(lǐng)域完全代替人工經(jīng)驗仍然需要開展更深入、更系統(tǒng)的研究.
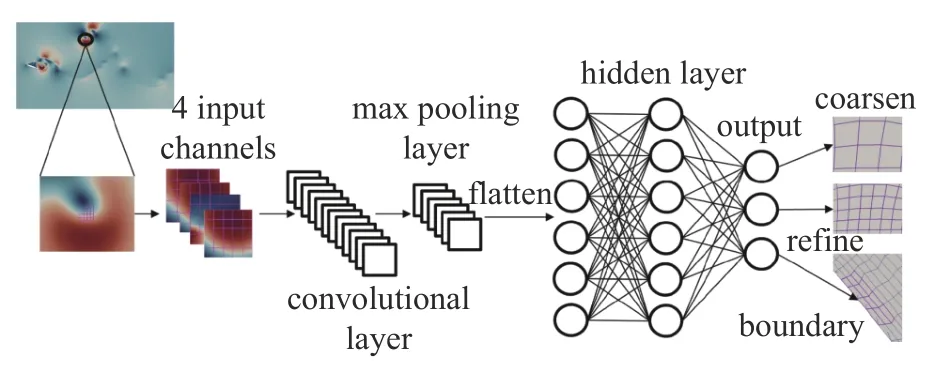
圖6 基于卷積神經(jīng)網(wǎng)絡的網(wǎng)格分類器[36]Fig.6 A mesh classifier based on convolutional neural network[36]
2.1.2 數(shù)值計算方法的智能化
超燃沖壓發(fā)動機的工作過程具有顯著的多尺度特征.從微觀的界面燒蝕、結(jié)構(gòu)損傷、小尺度渦摻混反應,到宏觀的結(jié)構(gòu)變形、疲勞破壞、流動燃燒模式切換.從高頻的機械振動和熱聲振蕩,到低頻的結(jié)構(gòu)顫振和流場喘振.精確求解各物理場在不同空間/時間尺度上的特征需要進一步提升數(shù)值計算方法的精度和效率.人工智能技術(shù)在圖像超分辨率重構(gòu)和數(shù)據(jù)壓縮等領(lǐng)域的成果對提升數(shù)值飛行的空間和時間分辨率具有重要參考價值.以卷積神經(jīng)網(wǎng)絡為主的模型可根據(jù)稀疏網(wǎng)格的計算結(jié)果重構(gòu)高分辨率的湍流結(jié)構(gòu)[37].進一步考慮湍流結(jié)構(gòu)隨時間的變化,采用多個時刻的流場作為神經(jīng)網(wǎng)絡的輸入,可獲得更符合物理規(guī)律的高分辨率重構(gòu)流場[38].自編碼器能實現(xiàn)流場數(shù)據(jù)的壓縮,也可根據(jù)少數(shù)時間步的流場重構(gòu)高時間分辨率的動態(tài)流場[39].
在加快數(shù)值計算的速度方面,人工智能在計算機動畫領(lǐng)域的應用已比較成熟.相比于求解控制方程,人工智能算法直接生成物理場可獲得1 × 103量級的加速比[40].基于U-Net 結(jié)構(gòu)設(shè)計的神經(jīng)網(wǎng)絡(見圖7)已能夠比較準確地預測機翼繞流[41]和凹腔燃燒室的反應流場[42],平均計算誤差在3%以內(nèi).計算效率的大幅提升使實時仿真成為可能.但是上述研究主要集中在二維問題,將相關(guān)方法進一步拓展到超燃沖壓發(fā)動機三維物理場構(gòu)建還需要開展更為深入的研究.

圖7 基于神經(jīng)網(wǎng)絡的流場快速預測[42]Fig.7 Fast flow field prediction based on neural network[42]
2.1.3 高保真的物理模型
高保真的物理模型是準確模擬多物理場的前提.關(guān)于超燃沖壓發(fā)動機中物理現(xiàn)象的模型已比較豐富,但是對部分物理現(xiàn)象的認識仍不夠深入,模型的精度和效率有待提升.多物理場耦合的機理尚不明確,而且短期內(nèi)在理論分析上取得突破性進展比較困難.以理論分析和人工智能技術(shù)為基礎(chǔ),構(gòu)建物理約束與數(shù)據(jù)驅(qū)動相結(jié)合的物理模型是未來的發(fā)展趨勢.
采用人工智能技術(shù)改進傳統(tǒng)物理模型是該領(lǐng)域的研究熱點.例如利用人工智能算法和試驗數(shù)據(jù)提升數(shù)值仿真預測壁面湍流剪切應力[43]、機翼表面壓力系數(shù)[44]和邊界層轉(zhuǎn)捩位置[45]等流場關(guān)鍵參數(shù)的能力.相比于一般的神經(jīng)網(wǎng)絡,嵌入了不變性特征(伽利略不變性和旋轉(zhuǎn)不變性等)的神經(jīng)網(wǎng)絡具有更好的表現(xiàn)[46].基于人工智能技術(shù)的物理模型也可完全取代傳統(tǒng)物理模型.Zhu 等[47]驗證了采用神經(jīng)網(wǎng)絡代替“Spallart-Allmaras”模型的可行性,構(gòu)建神經(jīng)網(wǎng)絡的過程如圖8 所示.以神經(jīng)網(wǎng)絡為基礎(chǔ)的模型成功預測了亞格子應力[48]、熱流[49]、燃燒化學反應速率[50]和進度變量耗散率等[51]關(guān)鍵參數(shù).

圖8 構(gòu)建數(shù)據(jù)驅(qū)動湍流模型的流程圖[47]Fig.8 Flow chart for building a data-driven turbulence model[47]
為進一步提升預測反應流場的效率和精度,任嘉豪等[52]采用神經(jīng)網(wǎng)絡和隨機森林建立了湍流火焰切向應變率的低維預測模型.Wan 等[53]建立了基于神經(jīng)網(wǎng)絡的燃燒化學反應機理,其計算速度是詳細化學反應機理的25 倍.Pulga 等[54]實現(xiàn)了神經(jīng)網(wǎng)絡與傳統(tǒng)燃燒化學反應機理的高度融合,在保證較高計算精度的條件下大大縮短了計算時間.Chung等[55]采用隨機森林分類器識別流場中的不同燃燒模式,并據(jù)此選擇不同的燃燒模型.該方法的計算精度顯著高于單一燃燒模型.此外,人工智能技術(shù)也可評估物理模型和數(shù)值計算方法的不確定度[56-57],為進一步優(yōu)化模型參數(shù)提供參考.
2.1.4 數(shù)據(jù)處理與知識挖掘
超燃沖壓發(fā)動機的數(shù)值飛行會產(chǎn)生海量的多物理場數(shù)據(jù).人在回路的研究方法無法從海量數(shù)據(jù)中快速歸納發(fā)動機工作的基本原理,準確提取設(shè)計發(fā)動機的關(guān)鍵參數(shù).有必要利用人工智能技術(shù)強大的特征提取能力和非線性映射能力輔助數(shù)據(jù)處理和知識挖掘.人工智能在該領(lǐng)域的應用主要分為多物理場特征結(jié)構(gòu)識別、高維數(shù)據(jù)降階和構(gòu)建關(guān)鍵參數(shù)的預測模型三個方面.
目前,識別特征結(jié)構(gòu)的方法大多依賴于研究人員對物理現(xiàn)象的認識,這導致相應的方法易受主觀影響[58].人工智能技術(shù)提供了一種解決上述問題的方案.基于卷積神經(jīng)網(wǎng)絡的特征結(jié)構(gòu)識別方法已在回流區(qū)識別[59]、快速激波檢測[60]和流線/流面提取[61]等方面取得成功,典型結(jié)果如圖9 所示.在新特征結(jié)構(gòu)的識別方面,文獻[62]采用聚類算法發(fā)現(xiàn)了混合層中的單/雙渦相互作用和多渦相互作用,證明了人工智能技術(shù)發(fā)現(xiàn)新特征結(jié)構(gòu)的能力.

圖9 Shock-Net和Tecplot 軟件識別的激波[60]Fig.9 Shock waves detected by Shock-Net and Tecplot[60]
以本征正交分解為代表的降階方法可以降低數(shù)據(jù)的維度和復雜性,構(gòu)建降階模型.但是傳統(tǒng)降階方法可能難以處理具有顯著高維度、非線性、隨機性和多尺度等特征的多物理場數(shù)據(jù)[63].為拓展傳統(tǒng)降階方法的適用范圍,Pawar[64]等采用本征正交分解和長短時神經(jīng)網(wǎng)絡分別模化已知和未知的物理現(xiàn)象(如圖10 所示),取得了遠高于傳統(tǒng)降階方法的精度.文獻[65-66]的研究表明,完全數(shù)據(jù)驅(qū)動的模型降階方法也能夠處理復雜的動力學系統(tǒng).降階模型既可快速預測物理場變化,也可大幅降低設(shè)計物理場控制方案的難度,對發(fā)動機智能控制具有重要意義.

圖10 基于本征正交分解和長短時記憶神經(jīng)網(wǎng)絡的混合模型降階方法[64]Fig.10 A hybrid model order reduction method based on proper orthogonal decomposition and long short-term memory neural network[64]
從數(shù)值飛行數(shù)據(jù)中提取關(guān)鍵參數(shù)并建立基于神經(jīng)網(wǎng)絡的預測模型可以實現(xiàn)快速工程估算.該方法已被用于預測飛行器表面熱流[67]、評估氣膜冷卻效果[68]和氣動性能分析等方面[69].得益于豐富的數(shù)據(jù)和神經(jīng)網(wǎng)絡強大的非線性映射能力,數(shù)據(jù)驅(qū)動的方法能夠取得與數(shù)值計算相當?shù)念A測精度.
2.2 超燃沖壓發(fā)動機智能數(shù)字孿生體
數(shù)值飛行智能化能夠提升傳統(tǒng)數(shù)值飛行技術(shù)的準確性、空間/時間分辨率和計算速度.進一步采用人工智能技術(shù)融合數(shù)值飛行數(shù)據(jù)、試驗數(shù)據(jù)和以往研究成果,構(gòu)建數(shù)據(jù)驅(qū)動與物理約束相結(jié)合的超燃沖壓發(fā)動機數(shù)字孿生體,可以加快發(fā)動機技術(shù)迭代,體現(xiàn)了數(shù)智飛行對傳統(tǒng)發(fā)動機研發(fā)模式的突破.
2.2.1 數(shù)字孿生技術(shù)在航空發(fā)動機中的應用
數(shù)字孿生是一種基于高保真物理模型、傳感器實時數(shù)據(jù)和歷史數(shù)據(jù)的虛擬模型,能夠完整刻畫物理系統(tǒng)的全壽命工作狀態(tài)[70].該技術(shù)最初被應用于開發(fā)面向未來的飛行器,近年來被逐漸引入到推進系統(tǒng)領(lǐng)域.
劉永泉等[71]和劉婷等[72]詳細闡述了航空發(fā)動機數(shù)字孿生概念.如圖11 所示,航空發(fā)動機的數(shù)字孿生體主要包括一系列面向發(fā)動機不同視角構(gòu)建的數(shù)字化模型.發(fā)動機實體和數(shù)字孿生體之間的動態(tài)交互使該技術(shù)能夠在發(fā)動機的全生命周期內(nèi)發(fā)揮作用.在發(fā)動機設(shè)計階段,根據(jù)發(fā)動機關(guān)鍵指標構(gòu)建數(shù)字樣機,在虛擬空間中實現(xiàn)發(fā)動機設(shè)計的快速優(yōu)化.在發(fā)動機生產(chǎn)/試驗/運行/維護階段,源自實體發(fā)動機的數(shù)據(jù)不斷提升數(shù)字孿生體的精度.數(shù)字孿生體對發(fā)動機工作狀態(tài)的實時預測可為故障診斷、控制優(yōu)化和性能預測提供參考,大幅降低發(fā)動機的運行維護成本.

圖11 航空發(fā)動機的數(shù)字孿生體Fig.11 Digital twin of an aero engine
2.2.2 超燃沖壓發(fā)動機智能數(shù)字孿生體的內(nèi)涵
相比于航空發(fā)動機,超燃沖壓發(fā)動機的工作環(huán)境更加嚴酷、物理過程更加復雜、各部件耦合更加緊密.其技術(shù)成熟度和實際壽命遠低于航空發(fā)動機.基于當前的技術(shù)基礎(chǔ),數(shù)字孿生體在超燃沖壓發(fā)動機優(yōu)化設(shè)計和試驗驗證等方面具有更廣闊的應用前景.數(shù)字孿生、人工智能和數(shù)值飛行的跨領(lǐng)域融合將為超燃沖壓發(fā)動機研制注入新的動力,推動發(fā)動機研發(fā)模式的變革.
結(jié)合超燃沖壓發(fā)動機的特點和發(fā)動機研制的需求,本文提出了能夠精確刻畫發(fā)動機不同層次關(guān)鍵參數(shù)的智能數(shù)字孿生發(fā)動機.如圖12 所示,數(shù)值飛行數(shù)據(jù)、試驗數(shù)據(jù)和先驗經(jīng)驗是構(gòu)建數(shù)字孿生體的數(shù)據(jù)基礎(chǔ).采用人工智能技術(shù)提取數(shù)據(jù)中蘊含的物理規(guī)律,根據(jù)數(shù)據(jù)的可靠性校驗并融合多源數(shù)據(jù).

圖12 超燃沖壓發(fā)動機的數(shù)字孿生體Fig.12 Digital twin of a scramjet engine
在完成數(shù)據(jù)深度挖掘和融合的基礎(chǔ)上建立包含三級預測模型的數(shù)字孿生體.第一級是關(guān)于發(fā)動機比沖和升阻比等關(guān)鍵參數(shù)的零維/一維數(shù)學模型.通過輸入發(fā)動機幾何構(gòu)型和來流條件等參數(shù)快速(約0.01 s)估算發(fā)動機各部件和整機性能,獲得發(fā)動機優(yōu)化設(shè)計的宏觀規(guī)律.第二級是利用U-Net 網(wǎng)絡、自編碼器和對抗性生成網(wǎng)絡等人工智能技術(shù)構(gòu)建能夠以約0.1 s 的速度生成發(fā)動機進氣道、燃燒室和尾噴管等部件多物理場的預測模型,獲得部件級多物理場的主要特征.在部件級預測模型的基礎(chǔ)上構(gòu)建能夠以約1 s 的速度生成發(fā)動機整機多物理場的預測模型(第三級),分析各部件間的耦合作用.
2.2.3 虛實交互的發(fā)動機研發(fā)模式
數(shù)字孿生體是實體發(fā)動機在虛擬空間中的映射.在虛擬空間中構(gòu)建和優(yōu)化發(fā)動機可大幅降低研制成本,縮短研發(fā)周期.數(shù)字孿生體在超燃沖壓發(fā)動機設(shè)計中的應用如圖13 所示.數(shù)字孿生體包含的三類模型分別對應發(fā)動機虛擬設(shè)計的三個階段.

圖13 數(shù)字孿生體在超燃沖壓發(fā)動機設(shè)計中的應用Fig.13 Application of digital twin in the field of scramjet engine design
在發(fā)動機設(shè)計的初期,利用關(guān)鍵參數(shù)的數(shù)學模型反演基本滿足各項設(shè)計目標和約束條件的發(fā)動機構(gòu)型,分析影響發(fā)動機性能的主要因素.確定發(fā)動機基準構(gòu)型后,采用各部件預測模型生成發(fā)動機內(nèi)部多物理場.根據(jù)多物理場細節(jié)進一步優(yōu)化各部件設(shè)計,探索發(fā)動機性能的極限.在虛擬設(shè)計的第三階段,通過整機預測模型生成發(fā)動機在不同飛行狀態(tài)下的完整多物理場,著重分析各部件之間的耦合作用對發(fā)動機性能的影響,明晰誘導和削弱耦合作用的主導因素,實現(xiàn)發(fā)動機不同彈道的虛擬飛行.
完成發(fā)動機在虛擬空間中的初步設(shè)計后,開展地面試驗和飛行試驗以驗證設(shè)計方案.在長程試驗中,發(fā)動機內(nèi)部存在多種流動、燃燒模式,發(fā)動機結(jié)構(gòu)應力/應變不斷發(fā)生變化.有必要在試驗中對發(fā)動機工作狀態(tài)進行實時仿真.這樣數(shù)智飛行已經(jīng)不只是一種評估手段,而是與真實試驗相融合,特別是針對各種變工況、大機動、變馬赫數(shù)等瞬變條件能夠?qū)崟r地反饋,對在地面準定常試驗極其難以評估的情況實現(xiàn)判讀,比如發(fā)動機燃燒不穩(wěn)定、結(jié)構(gòu)疲勞和可靠性等.
基于當前的數(shù)值計算方法和計算硬件,在億級網(wǎng)格下高精度求解發(fā)動機非穩(wěn)態(tài)多物理場在一秒內(nèi)的變化需要一周乃至更長時間.智能化發(fā)動機數(shù)字孿生體提供了一種解決的方法.在試驗中,實體發(fā)動機及其數(shù)字孿生體并行運行.數(shù)字孿生體根據(jù)飛行條件和傳感器的數(shù)據(jù)感知實時生成發(fā)動機多物理場.基于人工智能技術(shù)的數(shù)字孿生體無需求解控制方程且容易實現(xiàn)并行計算,其運行速度可比傳統(tǒng)的數(shù)值計算方法高數(shù)個數(shù)量級.通過采用循環(huán)神經(jīng)網(wǎng)絡和長短時記憶神經(jīng)網(wǎng)絡,數(shù)字孿生體可獲得處理時間相關(guān)數(shù)據(jù)的能力,實現(xiàn)對發(fā)動機工作狀態(tài)的實時監(jiān)測和評估,特別是對于狀態(tài)的瞬變過程,可以給出快速評估.試驗結(jié)束后可利用試驗數(shù)據(jù)進一步提升數(shù)字孿生體的精度.
顯然,依托試驗校正的數(shù)字孿生體開展試驗復盤和參數(shù)化虛擬試驗能夠減少試驗次數(shù)、削減試驗成本、加快技術(shù)迭代.對于更高階精度的數(shù)智飛行的應用,還可以作為一種標準和規(guī)范,用于方案階段的全彈道飛行考核,并作為研制程序的環(huán)節(jié),真正提升方案設(shè)計水平.
3 超燃沖壓發(fā)動機數(shù)智飛行的發(fā)展重點
充分發(fā)揮人工智能對發(fā)動機研發(fā)的賦能作用,實現(xiàn)從數(shù)值飛行到數(shù)智飛行的跨越,需著重開展以下三個方面的工作.
3.1 數(shù)據(jù)驅(qū)動與物理約束的有機結(jié)合
人工智能在提升數(shù)值飛行精度和效率等方面的作用已得到初步驗證.基于人工智能算法的各類預測模型也具有較高的預測精度.但是,作為一種數(shù)據(jù)驅(qū)動的研究方法,該方法存在物理意義不明確、可解釋性不足和泛化能力有限等問題.由于獲得多物理場數(shù)據(jù)的高昂成本,無法通過大幅擴充樣本數(shù)量的方法解決上述問題.這使得物理約束在數(shù)智飛行領(lǐng)域尤為重要,構(gòu)建相關(guān)模型時需采用數(shù)據(jù)驅(qū)動與物理約束相結(jié)合的方法.
目前主要有兩種將物理約束嵌入人工智能模型的方法,分別是改進樣本數(shù)據(jù)分布[46]和構(gòu)造自定義損失函數(shù)[73].合理設(shè)計樣本數(shù)據(jù)分布可將伽利略不變性和旋轉(zhuǎn)不變性等規(guī)律嵌入模型,但是該方法很難使模型自然滿足各類守恒律(例如質(zhì)量守恒、動量守恒)和其他物理約束.在常見損失函數(shù)的基礎(chǔ)上添加各類物理約束的殘差可使人工智能模型的預測結(jié)果盡可能滿足已知物理規(guī)律.但是殘差項系數(shù)的設(shè)置依賴研究人員經(jīng)驗.過大的系數(shù)可能導致物理場細節(jié)消失.在后續(xù)研究中,有必要針對發(fā)動機數(shù)值仿真和多物理場的特點開發(fā)本領(lǐng)域獨特的激活函數(shù)、神經(jīng)元、網(wǎng)絡結(jié)構(gòu)和優(yōu)化算法等,使相關(guān)模型自然滿足各類物理規(guī)律和先驗經(jīng)驗.
3.2 智能化多物理場聯(lián)合仿真平臺
超燃沖壓發(fā)動機工作過程中涉及復雜的物理現(xiàn)象,且各物理場緊密耦合.相關(guān)物理現(xiàn)象具有顯著的非線性和多尺度特征,涉及不同的控制方程和求解方法.人工智能的引入使相關(guān)算法更為復雜.實現(xiàn)智能化多物理場聯(lián)合仿真需要構(gòu)建一個囊括豐富物理模型和多種求解器的仿真架構(gòu),并建立擁有強大算力的計算平臺.
在軟件方面,FlowStar,OpenFOAM,CFDFASTRAN和NASTRAN 等一系列開源或商業(yè)軟件已能比較準確地求解單個物理場.COMSOL和ANSYS 平臺已可以實現(xiàn)多物理場的松耦合求解.但是目前尚無能夠準確求解超燃沖壓發(fā)動機中多物理場耦合效應的仿真平臺.構(gòu)建聯(lián)合仿真平臺一方面要充分吸納現(xiàn)有代碼,另一方面要針對超燃沖壓發(fā)動機的特點開展優(yōu)化,在保證物理場緊密耦合前提下盡可能實現(xiàn)各求解模塊的解耦.目前計算機硬件發(fā)展飛速,E 級巨型機、GPU 異構(gòu)并行都投入使用,結(jié)合計算硬件體系開展大規(guī)模高效率求解多物理場是智能化數(shù)值飛行的重要發(fā)展方向.
3.3 發(fā)動機數(shù)字孿生體的構(gòu)建
基于多源數(shù)據(jù)構(gòu)建實體發(fā)動機的數(shù)字孿生體是實現(xiàn)虛實交互的發(fā)動機設(shè)計的關(guān)鍵.數(shù)字孿生體的精度和效率直接影響發(fā)動機虛擬設(shè)計和虛擬飛行的工程應用價值,決定了數(shù)字孿生體能否在地面/飛行試驗中實時監(jiān)測和預測發(fā)動機工作狀態(tài).
構(gòu)建高保真、高效率的發(fā)動機數(shù)字孿生體至少可以從以下幾個方面著手.一是進行數(shù)據(jù)降維,根據(jù)發(fā)動機設(shè)計需要合理舍棄部分物理場細節(jié),降低建模難度.二是在飛行包線內(nèi)科學選取典型工況和發(fā)動機關(guān)鍵設(shè)計參數(shù),降低準備數(shù)值飛行數(shù)據(jù)庫和訓練預測模型的計算成本.三是根據(jù)發(fā)動機中的關(guān)鍵物理現(xiàn)象(如激波和反應回流區(qū)等)和各物理場之間的約束關(guān)系有針對性地設(shè)計模型結(jié)構(gòu)和訓練方法.四是不斷將發(fā)動機研發(fā)獲得的新數(shù)據(jù)輸入數(shù)字孿生體,使數(shù)字孿生體隨發(fā)動機設(shè)計方案動態(tài)進化.
4 總結(jié)
超燃沖壓發(fā)動機數(shù)值飛行旨在利用內(nèi)外流一體化仿真研究發(fā)動機從啟動到完成各種狀態(tài)和工況到最后關(guān)機的全過程,分析內(nèi)外流的耦合作用和影響因素,預示發(fā)動機性能和工作穩(wěn)定性.廣義數(shù)值飛行還需在內(nèi)外流一體化仿真的基礎(chǔ)上同步求解傳熱過程和結(jié)構(gòu)形變等多物理場,揭示多物理場耦合效應對發(fā)動機綜合性能和熱結(jié)構(gòu)安全的影響,預示發(fā)動機的可靠性.相關(guān)模型、算法的發(fā)展和計算硬件算力的提升使廣義數(shù)值飛行有望在未來5 年內(nèi)實現(xiàn).
伴隨著人工智能的興起,相關(guān)研究方法正快速滲透至發(fā)動機數(shù)值飛行的各個方面.基于數(shù)值飛行的發(fā)展趨勢,本文提出“數(shù)智飛行”這一概念.數(shù)智飛行的具體內(nèi)涵主要體現(xiàn)在以下兩個方面:一是借助人工智能突破數(shù)值飛行的發(fā)展瓶頸,全面提升數(shù)值飛行的準確性、精度和速度,提高數(shù)據(jù)處理和知識挖掘的效率.二是利用人工智能技術(shù)融合數(shù)值飛行數(shù)據(jù)、試驗數(shù)據(jù)和先驗經(jīng)驗,并在數(shù)據(jù)融合的基礎(chǔ)上構(gòu)建實體發(fā)動機的數(shù)字孿生體,最終實現(xiàn)虛實交互的發(fā)動機設(shè)計.基于數(shù)值飛行和人工智能的發(fā)展水平,有望在未來10 內(nèi)實現(xiàn)超燃沖壓發(fā)動機數(shù)智飛行.
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
民用飛機設(shè)計與研究(2019年2期)2019-08-05 01:33:40
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
中學生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05
南風窗(2016年19期)2016-09-21 16:51:29
中學生(2015年2期)2015-03-01 03:43:33
汽車與新動力(2015年1期)2015-02-27 12:11:01