基于扭擺的微沖量測量方法及實(shí)驗(yàn)研究1)
2022-04-07 06:56:20楊超賀建武
力學(xué)學(xué)報(bào) 2022年3期
楊超 賀建武 章 楚 康 琦,2) 段 俐
* (中國科學(xué)院力學(xué)研究所,北京 100190)
? (中國科學(xué)院大學(xué)工程科學(xué)學(xué)院,北京 100049)
引言
2019 年8 月31 日,中國科學(xué)院空間科學(xué)(二期)戰(zhàn)略性先導(dǎo)科技專項(xiàng)首發(fā)星,微重力技術(shù)實(shí)驗(yàn)衛(wèi)星,也是我國首顆空間引力波探測技術(shù)實(shí)驗(yàn)衛(wèi)星,在酒泉衛(wèi)星發(fā)射中心成功發(fā)射.微重力技術(shù)實(shí)驗(yàn)衛(wèi)星(后命名為“太極一號”)是以重大基礎(chǔ)科學(xué)前沿涉及的關(guān)鍵技術(shù)驗(yàn)證為任務(wù)目標(biāo)的技術(shù)驗(yàn)證星,對航天器平臺高微重力水平控制技術(shù)以及空間超高精度測距技術(shù)進(jìn)行在軌實(shí)驗(yàn)驗(yàn)證.“太極一號”的成功發(fā)射與第一階段在軌測試任務(wù)順利完成,邁出了我國空間引力波探測的第一步,為我國在空間引力波探測領(lǐng)域率先取得突破奠定了基礎(chǔ).脈沖寬度調(diào)制式冷氣微推力器在“太極一號”姿態(tài)控制中起到關(guān)鍵作用.此外,近年來微納衛(wèi)星的快速發(fā)展,微納衛(wèi)星在空間軌道上精確編隊(duì)飛行,協(xié)同工作、集群、星座以及軌道維持、姿態(tài)調(diào)整等任務(wù)都需依靠微推力器.除上述脈沖冷氣微推力器外,脈沖等離子體推力器(pulsed plasma thruster,PPT)也是有著廣闊的應(yīng)用前景.PPT 因比沖高、體積小、質(zhì)量輕、結(jié)構(gòu)簡單和耐用,以及所需星上電源功率小等優(yōu)點(diǎn),在微納衛(wèi)星研究領(lǐng)域得到了越來越多的重視[1].脈沖式微推力器產(chǎn)生的沖量元一般從1 μN(yùn)·s 到百 μN(yùn)·s[2]不等,分辨力可達(dá)0.1 μN(yùn)·s,這就對微推力器推力沖量的測量提出新的挑戰(zhàn).
國內(nèi)外研究學(xué)者針對微沖量測量設(shè)計(jì)加工了多種測量裝置,主要有懸絲扭擺[3-5]與樞軸扭擺[6-13]兩種結(jié)構(gòu).樞軸扭擺結(jié)構(gòu)相比于懸絲扭擺只有一個敏感自由度,抗干擾能力強(qiáng),應(yīng)用更為廣泛.常用的基于扭擺的微沖量測量方法有兩種,方法一是根據(jù)單個沖量元瞬間作用于無阻尼扭擺后,扭擺轉(zhuǎn)動最大角位移計(jì)算沖量[3-11,14-17];方法二是根據(jù)高固定頻率的連續(xù)脈沖作用于有阻尼扭擺后,扭擺轉(zhuǎn)動的平均角位移計(jì)算沖量[10,13,18-21].在沖量測量的性能方面,Koizumi 等[2]研制的推力測量裝置已成功應(yīng)用于液體工質(zhì)PPT 與二極管激光燒蝕微推進(jìn)器的沖量測量,在兩種推力器沖量測量中,測量裝置的精度分別為2.1 μN(yùn)·s和0.7 μN(yùn)·s.Cubbin 等[9]研制的推力測量裝置可測沖量范圍100 μN(yùn)·s 到10 N·s,測量誤差小于2%,并已應(yīng)用于PPT 沖量測量.Haag[10]利用平均推力方法即方法二測得某一型號脈沖等離子體推力器沖量元為260 μN(yùn)·s,由扭擺漂移帶來的誤差小于1%.華中科技大學(xué)研制的懸絲扭擺推力測量裝置推力測量范圍達(dá)264 μN(yùn),分辨力0.09 μN(yùn),此外該推力臺架最高可測1350 μN(yùn)·s 的沖量,分辨力為0.47 μN(yùn)·s,測得用于中國TEPO 航天任務(wù)的PPT 的沖量元為58.4 μN(yùn)·s,重復(fù)性約為5%[3-4].國防科學(xué)技術(shù)大學(xué)魯高飛[18]使用扭擺測得推力器在20 J和11.25 J 放電能量下產(chǎn)生沖量分別為422.415 μN(yùn)·s,244.266 μN(yùn)·s,相對誤差分別為 1.28%,2.05%;航天工程大學(xué)激光推進(jìn)及其應(yīng)用國家重點(diǎn)實(shí)驗(yàn)室針對脈沖激光推力器的微沖量測量進(jìn)行了大量系統(tǒng)且深入的研究[14,22],研制的基于懸絲的水平扭擺沖量測量裝置測量了激光與工質(zhì)作用產(chǎn)生的微沖量,結(jié)果表明該測試系統(tǒng)分辨率為0.02 μN(yùn)·s,量程為0.2~ 80 μN(yùn)·s[5];此外研制的樞軸扭擺測試臺架理論推力測量范圍達(dá)609.6 μN(yùn),分辨力0.024 4 μN(yùn),利用平均推力測量方法,以電磁螺線圈與永磁體作為激勵器,對微推力器進(jìn)行仿真,進(jìn)一步研究了推力架的性能.測試了具有相同振幅和脈沖寬度的17,33.5和55 Hz 的3 組力脈沖,各頻率重復(fù)性誤差分別為7.04%,1.78%和5.08%[13].
研究團(tuán)隊(duì)在微推力器推力大小、分辨力、噪聲測量方面進(jìn)行了一系列研究[23-25],針對脈沖推力器的沖量測量,本文工作采用常見的兩種基于扭擺的沖量測量方法,以電磁螺線圈與永磁體作為激勵器,對團(tuán)隊(duì)研制的亞微牛級推力測量系統(tǒng)微沖量測量能力進(jìn)行評估,以期服務(wù)于脈沖微推力器研制改進(jìn)與性能評價.
1 推力測量系統(tǒng)
1.1 系統(tǒng)組成
推力測量系統(tǒng)主要包括推力測量裝置、真空罐、電容式位移傳感器、高精度電子天平、源表和電腦等硬件,以及基于Labview 的標(biāo)準(zhǔn)力產(chǎn)生與扭擺自標(biāo)定軟件、微推力標(biāo)定軟件,系統(tǒng)組成如圖1 所示.推力測量裝置中的扭擺與底座光學(xué)平臺通過樞軸連接,平衡并固定.推力器安裝在扭擺的一側(cè),另一側(cè)安裝了電容位移傳感器,同時通過位移限制裝置保護(hù)傳感器頭免于扭擺的碰撞.靜電梳接地端安裝在扭擺上,而接高壓端則安裝在三維位移臺上.扭擺上為配重預(yù)留諸多螺絲孔,配重根據(jù)實(shí)際需要添加.磁阻尼裝置則由U 型鐵和兩個強(qiáng)磁塊組成,放置在扭擺右端前后側(cè).樞軸正上方通過設(shè)計(jì)以金屬液體作為橋接的通電導(dǎo)線,避免了實(shí)際推力器測量中導(dǎo)線帶來的扭矩干擾[26],同時設(shè)計(jì)供氣軟管道與樞軸同心,盡可能降低氣管帶來的扭矩影響.

圖1 推力測量系統(tǒng)[25]Fig.1 Thrust measurement system[25]
1.2 推力測量原理
標(biāo)準(zhǔn)力產(chǎn)生裝置原理圖如圖2 所示,靜電梳由高壓端與接地端兩個梳齒組成.在插入方向上,其交叉齒間產(chǎn)生的靜電力與輸入電壓的二次方具有良好的線性關(guān)系[27-28]

圖2 標(biāo)準(zhǔn)力產(chǎn)生裝置原理Fig.2 Principle of standard force generating device

其中F是靜電力,方向平行于靜電梳齒,N為靜電梳齒對數(shù),ε0為真空介電常數(shù),V是所加正高壓,h為靜電梳寬度,g為靜電梳交叉齒間距.
通過高精度電子天平測量不同電壓下靜電力即標(biāo)準(zhǔn)力大小,采用最小二乘法對電壓平方和靜電力做一次擬合,得到兩者之間的關(guān)系式為[25]

其中,Q1=-0.024 39 μN(yùn),Q2=0.001 107 μN(yùn)/V2,均方差為0.001 61.
相同規(guī)格的靜電梳對也安裝在推力測量裝置上,高壓端由源表提供正電壓,與接地端產(chǎn)生標(biāo)準(zhǔn)靜電力,帶動扭擺轉(zhuǎn)動,根據(jù)式(2)以及源表高壓監(jiān)測可得該力大小,扭擺轉(zhuǎn)動帶來的位移由電容位移傳感器測量;結(jié)合標(biāo)準(zhǔn)力大小可得位移與標(biāo)準(zhǔn)力關(guān)系.此后當(dāng)推力器工作時,推力可由位移和標(biāo)準(zhǔn)力關(guān)系式計(jì)算得出.
1.3 靜態(tài)推力測量性能
如圖3 與圖4 所示,經(jīng)過優(yōu)化,該系統(tǒng)的推力分辨力達(dá)到0.025 μN(yùn),背景噪聲在1 mHz~ 1 Hz 之間優(yōu)于0.1 μN(yùn)/Hz1/2.具體標(biāo)定方法可查閱文獻(xiàn)[25].

圖3 推力測量系統(tǒng)分辨力[25]Fig.3 Resolution of thrust measurement system[25]

圖4 推力測量系統(tǒng)背景噪聲[25]Fig.4 Thrust measurement system background noise[25]
2 微沖量測量方法
2.1 最大角位移測量沖量元
扭擺的運(yùn)動方程可以表示為

其中,J為扭擺的轉(zhuǎn)動慣量,θ 為扭擺的運(yùn)動角位移,λ為阻尼因子,k為樞軸扭轉(zhuǎn)系數(shù),F(t)和L分別為作用在扭擺上的力與力臂長度.
為方便二階方程的求解,一般將其轉(zhuǎn)換為如下形式[16]

ζ為無量綱參數(shù)阻尼比,
假設(shè)沖量作用時間極短的情況下,扭擺運(yùn)動為單自由度系統(tǒng)的有阻尼振動,其運(yùn)動方程如下
此時,由動量矩定理

得

當(dāng)阻尼比趨近于零時,單個沖量元表達(dá)式為

2.2 平均角位移測量沖量元
以固定的周期T對扭擺施加相同的單沖量元,此時扭擺運(yùn)動狀態(tài)為單自由度系統(tǒng)的有阻尼受迫振動.作用力矩M(t)=F(t)L=M(t+kT) (T=1,2,···),滿足狄利赫里條件,進(jìn)行傅里葉級數(shù)展開
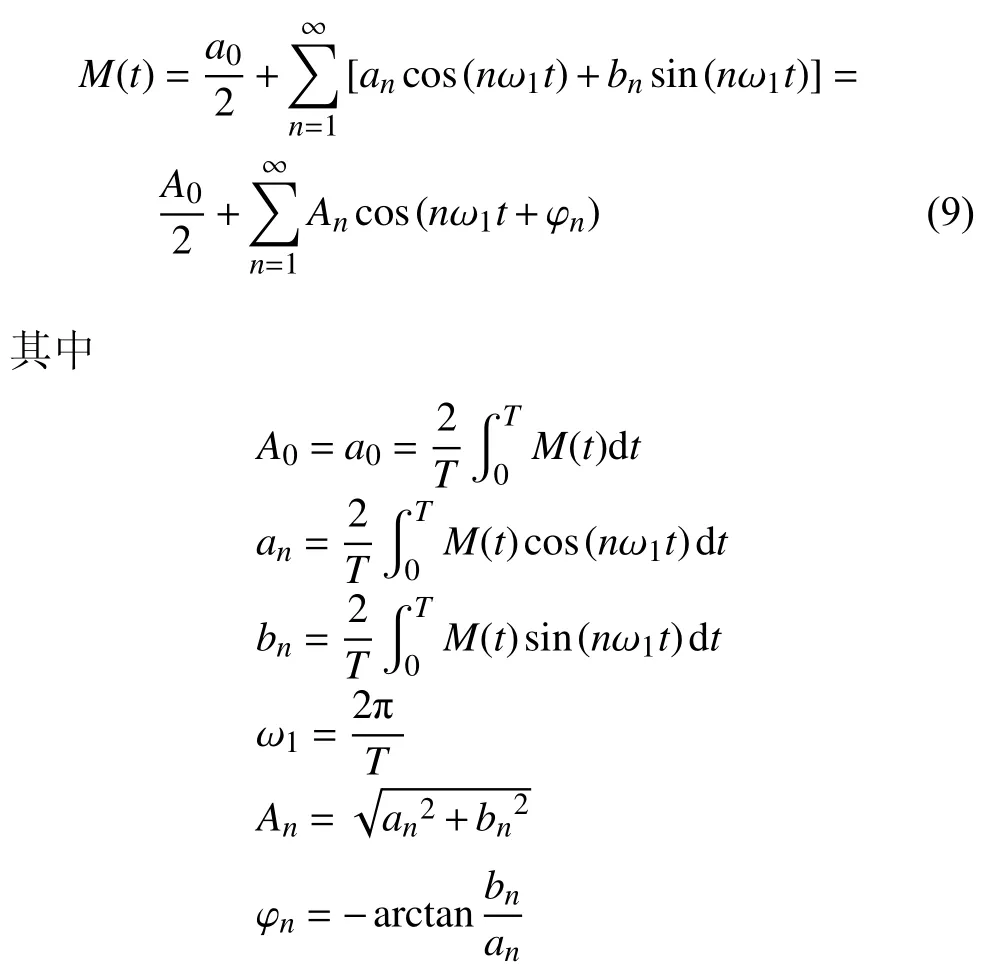

則系統(tǒng)響應(yīng)為[13,19]

有阻尼受迫振動由衰減振動與受迫振動合成,衰減振動隨時間增加很快衰減,以后系統(tǒng)基本上按受迫振動的規(guī)律進(jìn)行周期振動[29].在阻尼較大情況下,即當(dāng) ω1?ωd時,最終扭擺在一固定位置以極微小振幅上下振動,該位置記為


3 微沖量測量實(shí)驗(yàn)
3.1 扭擺系統(tǒng)參數(shù)標(biāo)定
進(jìn)行微沖量測量前需要對扭擺系統(tǒng)參數(shù)J,λ,k進(jìn)行標(biāo)定.
利用靜電梳,對扭擺施加一已知大小的恒定推力F,該力力臂設(shè)為R,扭擺微小擺動,J,λ和k為常數(shù).扭擺的運(yùn)動角位移 θ 在實(shí)際中難以測量,常用位移傳感器測量擺端位移再換算擺動角度,在小角度下有

其中x是位移傳感器測量的位移量,b是傳感器測量點(diǎn)到扭擺轉(zhuǎn)動中心的長度,于是式(3)可改寫為

扭擺振動在有阻尼情況下逐漸收斂穩(wěn)定,此時扭擺速度、加速度為0,根據(jù)式(16)得到扭轉(zhuǎn)系數(shù)表達(dá)式為

同樣利用靜電梳對扭擺施加瞬時激勵,此后扭擺自由振蕩,通過對位移傳感器測量的位移量進(jìn)行頻譜分析,找到扭擺無阻尼振蕩頻率f0和有阻尼振蕩頻率fd,分別對應(yīng)的角頻率為

則扭擺轉(zhuǎn)動慣量為

阻尼因子為

3.2 最大角位移測量沖量元實(shí)驗(yàn)
以電磁螺線圈與永磁體作為激勵器,對微推力器進(jìn)行仿真,與文獻(xiàn)[13]永磁體固定于扭擺上不同的是,如圖5 所示,本實(shí)驗(yàn)中永磁體固定于扭擺外,螺線圈則固定于扭擺之上,電磁螺線圈與控制裝置即函數(shù)發(fā)生器通過設(shè)計(jì)電極橋接裝置連接,從而避免導(dǎo)線帶來的扭矩,如此布局更符合脈沖推力器的測量實(shí)際.

圖5 實(shí)驗(yàn)布局[25]Fig.5 Experiment layout[25]
利用函數(shù)發(fā)生器對電磁螺線圈輸入恒定電壓,根據(jù)偏轉(zhuǎn)位移與扭轉(zhuǎn)系數(shù)k測得該電磁力大小約為36.65 μN(yùn),電磁力大學(xué)如圖6 所示.

圖6 電磁力大小Fig.6 The magnitude of electromagnetic force
取下永磁阻尼裝置后,調(diào)節(jié)函數(shù)發(fā)生器輸出持續(xù)3 ms 同一恒壓,扭擺自由轉(zhuǎn)動,根據(jù)測得的轉(zhuǎn)動位移結(jié)合式(8)和式(15)計(jì)算該沖量元,其表達(dá)式為圖7 為測量結(jié)果.以扭擺最大位移計(jì)算測得該沖量大小為0.11 μN(yùn)·s.


圖7 3ms 沖量測量結(jié)果Fig.7 Three millisecond impulse measurement result
同一恒壓持續(xù)時間改變成300 ms.此時測量結(jié)果如圖8 所示,大小為9.249 μN(yùn)·s,與理論值10.991 μN(yùn)·s 相差甚遠(yuǎn),這是因?yàn)槭?8)是基于沖量瞬間耦合且無阻尼兩個假設(shè)建模得出,300 ms 的沖量持續(xù)時間已不滿足該假設(shè),仍以最大角位移測量沖量元,導(dǎo)致測量誤差增大,將在第5 節(jié)誤差分析中進(jìn)行系統(tǒng)誤差分析.

圖8 300ms 沖量測量結(jié)果Fig.8 Three hundred milliseconds of impulse measurement result
若以該方法測量,可測沖量分辨力、大小由測量位移的分辨力與量程決定,考慮位移噪聲影響,本系統(tǒng)沖量測量范圍為0.05~ 220 μN(yùn)·s,分辨力可達(dá)0.02 μN(yùn)·s.
3.3 平均角位移測量沖量元實(shí)驗(yàn)
加上永磁阻尼裝置后,設(shè)置函數(shù)發(fā)生器輸出波形為方波,輸出頻率1 kHz,占空比從10%,以10%的臺階調(diào)節(jié)到90%.
扭擺在該高頻電磁力作用下自由轉(zhuǎn)動,根據(jù)測得的轉(zhuǎn)動位移結(jié)合式(8)和式(15)計(jì)算該沖量元,其表達(dá)式為

圖9 為9 個臺階推力測量結(jié)果.若以該方法測量,由式(23)可知,可測沖量分辨力、大小,除了推力測量范圍與分辨力外還與脈沖周期有關(guān).本系統(tǒng)的推力分辨力可達(dá)0.025 μN(yùn),最大推力測量可達(dá)400 μN(yùn)[25],所以當(dāng)該周期為1 ms 時,本系統(tǒng)沖量最低可測25 pN·s 的沖量,分辨力可達(dá)25 pN·s.周期為一秒時最高可測400 μN(yùn)·s 沖量,分辨力為25 nN·s.

圖9 平均推力Fig.9 Average thrust
4 誤差分析
4.1 最大角位移測量法誤差分析
(1)系統(tǒng)誤差分析
實(shí)際測量中阻尼不可能完全不存在,且沖量存在持續(xù)時間,需要對阻尼以及沖量持續(xù)時間帶來的誤差進(jìn)行分析.
阻尼帶來的誤差可表示為

式中 ε 與 ζ 的關(guān)系如表1 所示.

表1 誤差與阻尼比的關(guān)系[16]Table 1 The relationship between error and damping ratio[16]
沖量存在持續(xù)時間帶來的誤差分析如下.忽略阻尼影響,當(dāng)沖量非瞬間耦合,在作用力持續(xù)時間tf內(nèi),扭擺的運(yùn)動單自由度系統(tǒng)無阻尼受迫振動,此后為無阻尼自由振動,受迫振動階段運(yùn)動方程可表示為[14]

自由振動階段為

通過數(shù)值模擬法來計(jì)算誤差更為方便.固定扭擺系統(tǒng)參數(shù)J和k,改變tf大小,根據(jù)數(shù)值解中最大偏轉(zhuǎn)角 θmax與式(8)得到?jīng)_量的數(shù)值解,而實(shí)際沖量大小則為

引入無量綱參數(shù):tf/T0,為沖量存在持續(xù)時間與扭擺自由振動周期之比,以方波為例,當(dāng)此無量綱參數(shù)為0.313 時,時間取4 s,步長為1/20 000,數(shù)值模擬結(jié)果如圖10 所示,此時誤差約為15.35%.

圖10 誤差分析數(shù)值模擬結(jié)果Fig.10 Error analysis numerical simulation result
表2 為tf/T0與系統(tǒng)誤差 ε 的關(guān)系.

表2 系統(tǒng)誤差與 tf/T0 的關(guān)系Table 2 The relationship between systematic error and tf/T0
(2) 測量誤差分析
根據(jù)式(1)、式(2)、式(15)、式(17)、式(18)、式(20)、式(22)可得測量誤差的傳遞關(guān)系

相對誤差則為

源表為吉時利2410 系列,電壓輸出與測量精度可達(dá)0.015%,所以由電壓測量帶來的誤差為0.03%;扭擺加工精度高,力臂采用千分尺測量,誤差小于0.20 mm,由此對標(biāo)準(zhǔn)力力臂與推力力臂造成的相對誤差分別小于0.20%和0.10%;周期測量帶來的誤差小于5 ms,由此帶來的相對誤差小于0.51%,位移噪聲約為15 nm,由此帶來的絕對誤差約為0.025 μN(yùn)·s,因此單沖量測量誤差可表示為[30]

4.2 平均角位移測量法誤差分析
根據(jù)式(1)、式(2)、式(15)、式(17)、式(23)可得測量誤差的傳遞關(guān)系為

相對誤差則為

在忽略位移噪聲對推力測量影響的前提下,結(jié)合第5.1 節(jié)的分析,相對測量誤差小于0.33%.
5 結(jié)論
本文針對超高水平空間微重力平臺建設(shè)中所用到的脈沖型微推力器的沖量測量需求,根據(jù)兩種基于扭擺的微沖量測量的方法:分別通過單一沖量元與連續(xù)沖量元作用于扭擺后的最大和平均角位移測量沖量,利用已有的微推力測量系統(tǒng),以電磁螺線圈與永磁體作為激勵器,進(jìn)行了實(shí)驗(yàn),對本系統(tǒng)的微沖量測量能力進(jìn)行評估,得出以下結(jié)論.
(1)單個沖量元瞬間作用于無阻尼扭擺后,通過扭擺轉(zhuǎn)動最大角位移計(jì)算沖量時,推力測量系統(tǒng)沖量測量范圍為0.05 μN(yùn)·s~ 220 μN(yùn)·s,分辨力可達(dá)到0.02 μN(yùn)·s.
(2)本系統(tǒng)的推力分辨力達(dá)到0.025 μN(yùn),最大推力測量可達(dá)400 μN(yùn);固定頻率的連續(xù)脈沖作用于有阻尼扭擺后,通過扭擺轉(zhuǎn)動的平均角位移即平均推力計(jì)算沖量時,沖量范圍、分辨力與連續(xù)脈沖的固定頻率有關(guān),頻率高時,沖量分辨力能力提高;頻率低時,可測沖量測量范圍更廣.
實(shí)際測量中,需要根據(jù)脈沖微推力器性能、特性等合理選擇測量方法.此外,本推力測量系統(tǒng)已成功應(yīng)用于“太極一號”技術(shù)試驗(yàn)衛(wèi)星無拖曳控制射頻離子微推進(jìn)系統(tǒng)和姿態(tài)控制冷氣微推進(jìn)系統(tǒng)模樣件、鑒定件和飛行件產(chǎn)品的各項(xiàng)地面推力參數(shù)標(biāo)定,為空間超高水平空間微重力平臺的建設(shè)做出了貢獻(xiàn).
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45