聽障跆拳道運動員在雙腿站立到單腿站立過渡任務中的平衡能力研究
2022-04-08 06:50:34段傳勇張劍波劉衛軍張瑛秋
中國體育科技 2022年3期
關鍵詞:研究
段傳勇,張劍波,李 明,劉衛軍,張瑛秋
平衡能力或姿勢控制是指在活動中保持身體在空間位置上的穩定性(stability)和定向性(orientation)的能力,是一種復雜的感覺運動控制技巧(Shumway et al.,1995)。它不僅需要肌肉力量控制身體的空間位置,還需要通過中樞神經系統來整合各種環境或任務下感覺系統(視覺、本體和前庭)提供的與身體空間位置和運動狀態相關的信息(付奕等,2010),從而產生適當的糾正力矩(Horak et al.,2010;Johansson et al.,1991)。由于不同的感覺信息并不總是可用或準確的,中樞神經系統必須以某種方式進行感覺運動調整,以在各種運動環境下保持姿態(Lord et al.,2005;Shumway et al.,1995)。對聽障跆拳道運動員來說,由于先天性聽力缺失或障礙引起的前庭窩神經的部分損傷,導致對平衡能力影響較大,可能引發姿勢控制障 礙(Collins et al.,1991;Meredith,2013;Potter et al.,1984),從而增加下肢關節損傷概率(Dallinga et al.,2012;De Noronha et al.,2008;Durall et al.,2011;Mcguine,2006;Wang et al.,2006)。
目前研究多致力于尋找敏感的平衡測試區分病理和健全的受試者(Dingenen et al.,2013;Gribble et al.,2009;Levin et al.,2012;Patterson et al.,2013;Phillips et al.,2008;Potter et al.,1984)。由于測試過程相對容易,研究通常在安靜狀態下評估平衡能力,不易引起姿勢控制缺陷(Reimann et al.,1999)。有研究強調動態姿勢穩定性測試極有可能引發肢體控制障礙(Duysens et al.,2010;Mckeon et al.,2008)。有些動態測試(如Biodex Stability System)雖能客觀地測量平衡能力,且測試有較高的可靠性并與靜力板的數據相關性較高(Arnold et al.,1998),但在不穩定的支撐面上(持續刺激)保持平衡并不能代表真實運動條件(Hinman,2000)。還有一些早期基于實驗室條件下的人體姿態控制的研究采用瞬態刺激(如支持表面突然運動)喚起典型的姿態反應(Allum,1983;Diener et al.,1984;Horak et al.,1986;Nashner et al.,1977)或人為刺激感受器(如肌肉或肌腱振動)(Kavounoudias et al.,1999)和前庭神經電刺激(Nashner et al.,1974;Watson et al.,1998)方法,其完全被動的應答類型脫離了運動實際。
聽障受試者傾向于在動態環境中表現出神經肌肉控制策略和模式的差異性(付奕 等,2011;Horak et al.,1990;Maheu et al.,2017;Oliveira et al.,2011;Peterka,2002),因此,一種可選擇的測試方法就是重心轉移(weight-shifting)。Gribble等(2009)認為,穩定用時(TTS)技術是一種重心轉移動作模式的測量動態穩定性的方法,研究分析了受試者從姿態擾動中恢復穩定并將地面反作用力控制在穩定姿態范圍內所需的時間。目前,TTS技術已經被廣泛用于病理識別測試,如膝關節損傷(Lord et al.,2005;Patterson et al.,2013)、踝關節損傷(Dingenen et al.,2013;Gribble et al.,2009;Levin et al.,2012)、偏癱患者(Dickstein et al.,1989)、中風患者(Haart et al.,2005)、帕金森患者(Mancini et al.,2012)等。但目前關于TTS識別技術的研究多關注于康復和醫療,還未從根本上認識到運動專項化特征對姿勢穩定性的要求,不能完全滿足體育科研的需求。聽障跆拳道運動員兼具有病理和競技雙重屬性,研究聽障運動員姿勢穩定性,對于提高其運動表現,降低運動損傷風險具有實踐意義。
采用雙腿站立階段(DLSP)向單腿站立階段(SLSP)重心轉移的過程來研究聽障跆拳道運動員的姿勢控制,重點關注了重心轉移過程中和轉移后的平衡控制過程。本研究假設:1)聽障跆拳道運動員壓力中心(center of presure,COP)轉移需要更長的時間,即過渡用時(TTR)、準穩定用時(TQSP)和TTS增加;2)聽障跆拳道運動員在準穩定階段(QSP)和SLSP的COP位移均方根值和速度均方根值增大。
1 研究對象與方法
1.1 研究對象
以22名備戰2019年第10屆殘疾人運動會的北京隊和山東隊聽障跆拳道運動員為受試者。從北京體育大學競技體育學院跆拳道專項班和附屬競技體校征募22名健全跆拳道運動員,并與聽障跆拳道運動員在身高、年齡、訓練水平上進行匹配。受試者基本情況如表1所示。
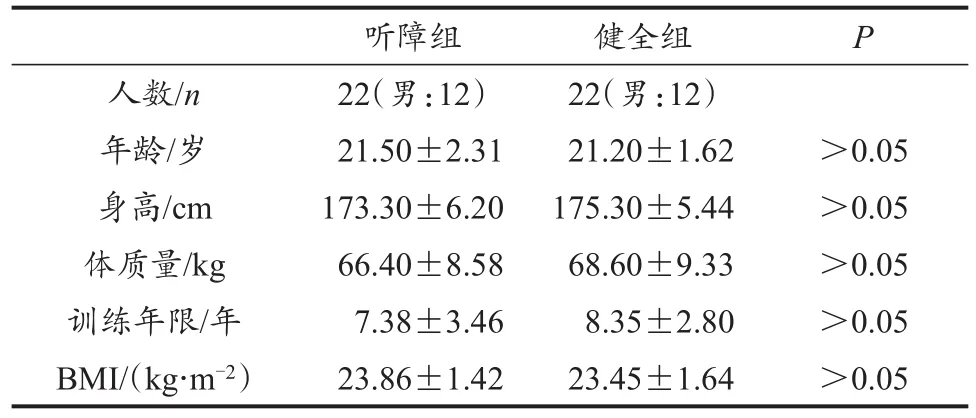
表1 受試者基本信息Table 1 Basic Information of Subjects
受試者通過健康狀況問卷調查,顯示健康狀況良好,聽障組受試者均具有10年以上的聽障生活和學習經歷,視覺和其他感官知覺發育完善,近3個月無急性下肢和頭部損傷,也無任何平衡障礙。此外,無任何慢性踝關節或膝關節損傷或損傷史,無任何急性或慢性背痛或損傷。在完成相應動作時無任何劇烈的疼痛影響他們以習慣的方式完成規定動作。受試者保持常規作息和飲食,未服用任何形式的保健品和藥物,均同意參加本次實驗,正式實驗之前,只告知受試者具體實驗過程,但對實驗目的不知情。所有受試者優勢腿皆為右腿,所有測試均采用左腿支撐,右腿擺動。測試地點為北京體育大學科研中心。
1.2 研究方法
1.2.1 數據收集
使用Micro 1401數據采集系統和Spike 2軟件(Cam‐bridge Electronic Design,UK),采樣頻率 500 Hz的瑞士Kistler(Kistler Instruments AG Corp.Winterthur,Switzer‐land)三維測力臺(90 cm×60 cm)上和低通濾波(截止頻率為5 Hz)測量地面反作用力、力矩和COP等參數。
1.2.2 實驗步驟
測試以裸足方式進行,實驗前受試者著寬松運動服、運動鞋在室內跑步機上完成5 min慢跑(速度為6 km/h)和5 min拉伸等熱身。正式測試時受試者站在測力臺上,雙腿與肩同寬,雙臂自然下垂,完成1次從DLSP(約30 s)到SLSP(>5 s)的過渡任務。DLSP時將腳的位置標記在測力臺上,以確保受試者每次試驗后回到相同的起始位置。DLSP時要求受試者盡量保持30 s靜止,在測試人員的動作信號(輕觸肩膀)下抬起對側腿至髖部屈曲90°位置,保持至少5 s的SLSP。受試者按下列順序,在睜眼偏好速度(preferred speed with eyes open,PSEO)、睜眼最大速度(maximum speed with eyes open,MSEO)、閉眼偏好速度(preferred speed with eyes closed,PSEC)和閉眼最大速度(maximum speed with eyes closed,MSEC)4種條件下完成重心轉移過渡任務,每種條件下重復4次測試,受試者測試順序隨機。在睜眼條件下測試時,要求受試者直視前方的白色墻壁;在閉眼條件下測試時,要求受試者閉眼,頭部保持水平。在實際測量前,受試者在每種測試條件下進行2次練習以熟悉動作。兩種測試條件之間,受試者可以休息以避免疲勞。
1.2.3 數據處理
綜合Van Deun等(2011)描述的方法進行數據分析,從DLSP過渡到SLSP時,人體COP首先向擺動腿方向移動,擺動腿抬腿之前往對側(支撐腿側)推離,從而進入SLSP。將整個任務分為4個階段:1)DLSP,定義為過渡任務開始點(SP)之前的階段;2)過渡階段(TRP),定義為SP與COP在ML方向速度矢量第2次為零之間的階段;3)QSP,定義為COP在ML方向的速度矢量第2次為零至新穩定點(NSP)之間的階段;4)SLSP,定義為新穩定點(NSP)之后的階段。其中TRP和QSP的時間總和為TTS(圖1)。
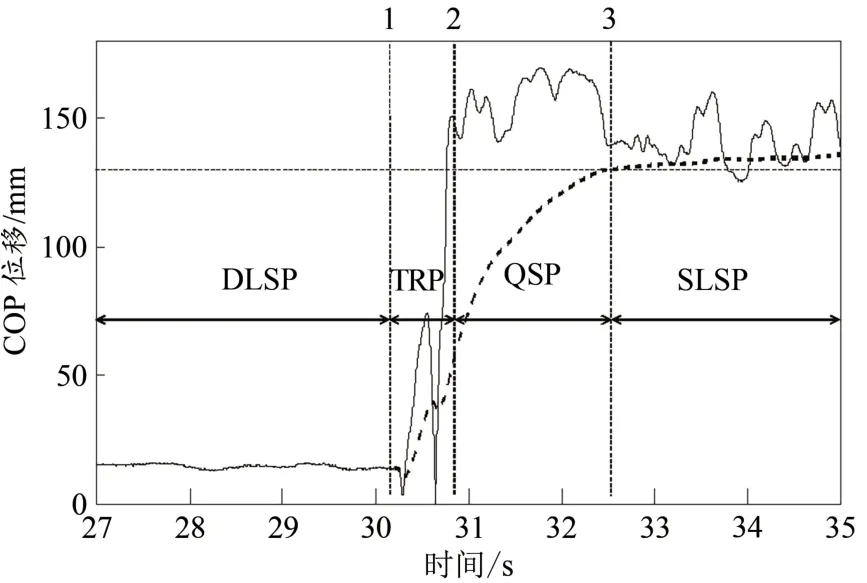
圖1 某聽障受試者MSEC下從DLS到SLS過程中COP位移隨時間變化示意圖Figure 1.Schematic Diagram of a Hearing-Impaired Subject’s COP Displacement Changing with Time from DLS to SLS Under the Condition of MSEC
AP和ML方向的COP軌跡數據是從開始重心轉移的前10 s開始計算的,此期間受試者處于DLSP。首先,分別用AP和ML方向力矩除垂直力計算AP和ML方向COP位移。COP位移由AP和ML方向位移均方根值計算得到,公式為Dingenen et al.,2013)。TTS需要通過序貫估計方法(sequential estimation method)計算COP向量模(vector modulus)的累積平均值來確定(Colby et al.,1999)。為確定累積平均值,先對COP向量的調制解調器的前2個數據點取平均值,然后對前3個數據點取平均值,再對前4個數據點取平均值,以此類推。直到計算最后1個COP向量模時,各點的累計平均值(估計值)達到其最終值減去其標準差0.25的時間點被認為是新穩定點(Colby et al.,1999),此時受試者進入SLSP(圖1)。此外,本研究計算了QSP后3 s的COP位移均方根值和速度均方根值。
2名聽障組受試者和1名健全受試者由于SLSP的穩定持續時間短(<5 s)且COP過度搖擺,序列估計方法未能計算出TTS。因此這3名參與者的數據不包括在統計數據中。
采用的參數包括:4個階段的COP位移均方根值和速度均方根值、TTR、TQSP、TTS。
1.3 統計分析
所有受試者基本特征均呈正態分布。年齡、體質量、身高、訓練年限、BMI組間比較采用獨立樣本t檢驗,性別采用卡方檢驗。計算所有姿態穩定性結果的4次試驗的平均值,所有結果均呈正態分布(P<0.05)。采用重復測量方差分析(ANOVA),分析條件與組間的差異。Tukey測試用于事后比較。所有分析的顯著性為P<0.05。使用SPSS 22.0進行統計分析。
2 研究結果
2.1 聽障組與健全組TRP時間參數對比
2.1.1 TTR、TQSP和TTS
圖2所示為聽障組與健全組TTS、TQSP、TTR“平均數±標準差”和“組×視覺×速度”方差分析結果。總體而言,聽障組在PSEC條件下需要更多TTR、TTS(P<0.05)。與最大速度條件相比,兩組在偏好速度條件下的TTS(圖2A)和TTR(圖2B)顯著增加(P<0.001),閉眼條件下的TQSP(圖2C)也顯著增大(P<0.001)。

圖2 聽障組與健全組組間及不同條件下差異Figure 2.Differences between Groups and Under Different Conditions
2.1.2 相關性
TTR與TTS結果間呈高度正相關,表明TTS的延長與過渡的延緩有關(圖3A、圖3C)。上述效應在各組和各種條件下都已經觀察到了。但閉眼條件下(聽障組:RPSEC=0.72,PPSEC=0.025;RMSEC=0.65,PMSEC=0.038;健全組 :RPSEC=0.82,PPSEC=0.046;RMSEC=0.67,PMSEC=0.022)比睜眼條件下(聽障組:RPSEO=0.66,PPSEO=0.017;RMSEO=0.56,PMSEO=0.048;健全組:RPSEO=0.60,PPSEO=0.029;RMSEO=0.54,PMSEO=0.011)更明顯;偏好速度條件下(聽障組:RPSEC=0.72,PPSEC=0.025;RPSEO=0.66,PPSEO=0.017;健全組:RPSEC=0.82,PPSEC=0.046;RPSEO=0.60,PPSEO=0.029)比最大速度條件下(聽障組:RMSEC=0.65,PMSEC=0.038;RMSEO=0.56,PMSEO=0.048;健全組:RMSEC=0.67,PMSEC=0.022;RMSEO=0.54,PMSEO=0.011)更明顯。TQSP結果與TTS結果間呈低度正相關或不相關,表明更長的穩定區間與QSP恢復可能沒有關系(圖3B、圖3D)。

圖3 過渡任務中TTR與TTS、TQSP與TTS間的相關性Figure 3.Correlation Between TTR and TTS,TQSP and TTS in Transition Tasks
2.2 聽障組與健全組COP軌跡對比
2.2.1 COP位移均方根值、速度均方根值、峰值位移、峰值速度對比
由于不同研究結果的差異可能是因使用不同COP搖擺參數造成的,本研究COP分析使用了4種不同的參數,即峰值位移(peak DISP)、峰值速度(peak VEL)、位移均方根值(DISP RMS)和速度均方根(VEL RMS)。
在峰值位移方面,速度對峰值位移的影響顯著(P<0.001),而病理和視覺對峰值位移的影響不顯著(P>0.05)。例如,研究發現TRP、QSP峰值位移在最大速度條件下顯著增加(P<0.001)(圖4)。

圖4 聽障組與健全組不同條件下COP峰值位移和峰值速度在TRP時的差異Figure 4.Differences of COP Peak Displacement and Peak Velocity Between Groups and Conditions in the Transitional Phase(TRP)
聽障組和健全組在TQSP以最快速度完成重心轉移任務時位移均方根值顯著增加(P<0.001);在閉眼條件下,聽障組位移均方根值顯著增加(P<0.001;圖5B)。SLSP時,兩組在閉眼條件下位移均方根值顯著增加(P<0.001;圖5C)。

圖5 聽障組與健全組不同條件下COP位移均方根值在DLSP(A)、QSP(B)、SLSP(C)的差異Figure 5.Differences of COP Displacement Root Mean Square Value in the DLSP(A)、QSP(B)、and SLSP(C)between Groups and Under Different Conditions
2.2.2 相關性
假設2表明,當達到SLSP時,COP轉移的延遲與不穩定性的增大相關。根據這一假設,本研究發現,聽障組(而非健全組)在睜眼條件下的過渡過程中,COP速度均方根值與TTS呈正相關(R=0.52,P<0.05)。然而,對過渡期間TTR和閉眼條件下TTS,后者的觀察沒有得到證實(P>0.05)。相比之下,研究發現無論是健全組還是聽障組,COP位移均方根值和TTR之間沒有顯著的相關性(P>0.05;圖6)。

圖6 聽障組與健全組在不同條件下COP速度均方根值在DLSP(A)、QSP(B)、SLSP(C)的差異Figure 6.Differences of COP Velocity Root Mean Square Values in the Two Groups in the DLSP(A),QSP(B)and SLSP(C)Under Different Conditions
3 分析與討論
重心轉移是一種非常自然且信息豐富的測試方法,對多種類型的患者姿態評估都較為方便(De Haart et al.,2005;Dickstein et al.,1989;Geurts et al.,2005;Ishii et al.,2010)。本研究表明,TTS評估是一種有效識別聽障跆拳道運動員姿勢穩定性缺陷的方法,聽障跆拳道運動員的姿勢穩定性要低于健全跆拳道運動員。本研究發現,將TTR、TTS及COP擺動量作為鑒別參數,TTR的延長與TTS的延長有關;TQSP與TTS不相關,且TTS的延長與SLSP的COP擺動幅度的增加沒有聯系。目前部分數據支持聽障跆拳道運動員使用重心轉移保護策略(某些條件下較長的TTR)。然而,這些數據無法用來證明觀測事件之間存在因果關系(較慢的TTR、較長的TTS和轉移后較大的COP擺動),事實上,這些過程可能是獨立的。
TTS評估測試將受試者置于4種不同的條件下,通過改變重心轉移時視環境條件、擾動程度以及支撐面的大小,有步驟地控制視覺和本體感覺的信息輸入,從而分別對視覺、本體和前庭系統等成分在維持姿勢穩定性的作用上進行單因素分析,對比聽障跆拳道運動員與健全跆拳道運動員的神經系統組織并適應有限的感覺信息的區別。基于跆拳道運動員的姿勢穩定性高于普通人的基本事實,在TRP時對擺動腿提膝高度做了與髖部呈90°規定,以加大擺動腿動作幅度和身體姿態不對稱性,增加了擾動,同時,受試者更能準確做到擺動腿提膝至與髖部呈90°,尤其在去除視覺后,這也更加符合跆拳道專項運動特征。
3.1 DLSP平衡能力分析
本研究發現,聽障組和健全組TTS評估在DLSP的姿勢穩定性(COP位移均方根值和速度均方根值)沒有顯著性差異。Fitzpatrick等(1994)研究表明,前庭閾值比視覺或本體感覺閾值大1個數量級,且高于正常站立時可以記錄到的最大搖擺運動,這意味著在DLSP中幾乎不依賴前庭覺控制姿態。本研究聽障跆拳道運動員因內耳前庭器的前庭傳入纖維破壞導致的聽力障礙或缺陷,使多感覺整合過程缺乏聽覺通道信息的反饋,是影響平衡能力的重要原因之一(雷正方等,2018),但雙腿站立在穩定支撐面時,即便將視覺去除,本體感覺也可以代償維持姿態控制。有證據表明,當大腦被剝奪了一種感官模式的輸入時,通常會通過1個或多個完整的感官系統的超常表現來補償,即使在沒有聲音輸入的情況下,聽覺皮層的跨模態重組可能提供調節視覺代償功能的神經基質(Lomber et al.,2010)。張鳳琴(2000)研究表明,聽障人群往往因過度依賴視覺輸入維持姿勢控制,發展出“直覺捕捉”反應策略。Fitzpatrick等(1994)也報道了站立時本體覺感知搖擺的閾值非常小,閉眼并不影響感知搖擺的閾值。
而在DLSP之后的重心轉移過程以及非穩定支撐面階段,聽障組和健全組的姿勢穩定性開始出現差異(P<0.05),提示視覺和本體感覺受到干擾或破壞時(即支持面不穩時),前庭覺將發揮重要作用。Horak等(2015)報道,在穩定支撐平面上,本體覺、前庭覺和視覺在維持穩定功能中分別占70%、20%和10%。意味著在非穩定階段,人體進行姿勢控制時對3種感覺依賴程度比例將發生變化。
3.2 TRP和QSP平衡能力分析
TRP的主要挑戰是將重心從相對穩定的DLSP轉移至SLSP(Hodges,1997);QSP的主要任務是盡量消除TRP的“擾動”,獲得“新穩定”,2個階段的共同任務是縮短TTS。本研究測量了TTR、COP峰值位移和峰值速度來描述TRP的姿勢穩定性。采用TQSP、COP位移均方根值和速度均方根值來描述QSP的姿勢穩定性。還測量了TTS來描述整個中間轉換過程的姿勢穩定性。
與健全組相比,聽障組在PSEC條件下TTR顯著增加,而在最高速度條件下各組間差異無顯著性意義。TTR增加可能是為了保持相同的運動表現(擺動腿速度)。除此類較慢的TTR外,聽障組TRP COP峰值位移和峰值速度都有所減小。
姿勢控制是一種復雜的運動控制技巧,當人體要完成指定任務時,中樞神經系統對多種感覺信息進行整合分析后下達運動指令,這時人體通過3種運動調節機制和姿勢協同運動來做出相應的改變,即踝關節調節、髖關節調節及跨步調節(Horak,2006;Shumway et al.,1995)。TRP中受試者需要建立穩定的支撐基礎以便重心轉移。當身體重心向目標移動時,需要恰當的速度,準確的目標和協調性,及時的姿勢穩定性,踝關節(大幅度,緩慢運動)、膝關節、髖關節(小幅度,短距離運動)和軀干周圍肌群參與維持姿勢運動控制能力(金挺劍等,2009;Fabio et al.,1990;Liston,1996)。
在隨意運動開始之前,中樞神經系統(CNS)將通過身體兩側預期姿勢調整來消除擺動腿的“擾動”從而保持身體穩定性。這種預期姿態調整發生在隨意運動之前,可能發揮 雙 重 作 用(Bouisset et al.,2009;Yiou et al.,2012a):一是“反擾動”,通過向計劃擾動(即擺動腿運動)的預期效果的相反方向進行運動,以減少因隨后的隨意運動而引起的姿勢干擾;二是通過產生必要的推進力來引發運動,從而起到一種姿勢上的“擾動”作用(Bouisset et al.,2009;Yiou et al.,2012a)。預期姿勢調整的特性可以根據預期自主運動引起的擾動來分級,其中運動速度可能是至關重要的(Rogers,1992;Rogers et al.,1990,1993;Yiou et al.,2012b)。
除TTR較長外,本研究發現聽障組在4種條件下COP峰值位移和峰值速度均小于健全組,但無顯著性意義。而有研究指出,在神經性失調患者(Hass et al.,2005,2008)以及慢性踝關節不穩定患者(Dingenen et al.,2015)中觀察到了COP位移和COP速度的減小,表明預期姿勢調整的不充分。不穩定或病態的受試者可能會使用一種他們感覺更安全的策略來控制負荷轉移,以盡可能降低單腿站立時的姿勢挑戰(Dingenen et al.,2015;Yiou et al.,2011)。在對踝關節不穩定患者研究中發現,中樞神經系統可以減少或抑制TRP的預期姿勢調整,以最小化其潛在的不穩定影響(Bouisset et al.,2009),這一現象還在急性卒中后患者(Haart et al.,2005)、髖關節骨關節炎患者(Tateuchi et al.,2011)、膝關節炎患者(Viton et al.,1999)的姿勢控制中有過描述。另外聽障運動員多年的生活和學習使得其更依賴視覺信息,閉眼后會對外界不確定刺激產生恐懼心理,從而影響平衡信息在大腦中傳播(Walicka-Cupry? et al.,2014)。本研究推測聽障運動員在某些條件下整合各種軀體感覺信息從而做出充分的姿勢調整的能力較健全運動員弱,但需要更多的實驗證據進一步驗證此假設。
本研究中以最大速度運動時,聽障組與健全組受試者TTR和TTS均顯著縮短,COP峰值速度和峰值位移均顯著增加。研究表明,擺動腿運動時間縮短時COP運動速度會增加(Rogers,1992;Rogers et al.,1993;Yiou et al.,2012b)。在最大速度條件下,組間的COP峰值速度和TTR無顯著差異。在偏好速度條件下,聽障組閉眼后的TTR時間顯著長于健全組,提示當有時間壓力時,聽障跆拳道運動員能夠達到和健全組相同的過渡速度,當沒有時間壓力時會選擇降低過渡時的速度。這同時表明,在PSEC條件下,可以將TTR作為鑒別聽障跆拳道運動員的敏感指標。
注意到當聽障組和健全組皆以最大速度運動時,TRP COP峰值位移和峰值速度顯著增加,而TTR顯著縮短,且沒有影響動態穩定性。這支持了在快速過渡時,縮短的TTR可能由更大的COP位移補償(Yiou et al.,2012b)的觀點。還支持了與之相似的觀點,即在沒有充分反饋控制的情況下執行過渡任務以節省時間,是以動作精確性為代價的(Diener et al.,1988)。挑戰增大,卻沒有足夠的TTR進行預期姿勢調整(Frank et al.,1990),受試者可能通過更側向地移動擺動腿來恢復兩側平衡,以補償兩側預期姿勢調整的不足(Zettel et al.,2002a.,2002b)。因此本研究認為,在時間壓力下,受試者為了更快地開始自主運動,縮短了TTR,同時增加了COP振幅,以保持最佳的動態穩定狀態。
Mergner等(2009)研究表明,在動態空間平衡中,空間感覺反饋(前庭)比動力反饋(力線索)更重要,且人體姿態在高速變換的狀態下保持平衡時對前庭覺依賴加大。這種人體保持平衡時對不同感官信息利用程度受具體運動條件影響的觀點,大體上與先前姿勢控制研究的觀點一致(Forssberg et al.,1982;Horak et al.,2010;Nash‐ner,1982),包括基于前庭電刺激實驗以及一般的運動控制實驗(Hultborn,2001;Prochazka,1989)的結果也證明這一觀點。這意味著,受試者視覺、聽覺、重心轉移的速度、幅度以及支撐條件會極大影響姿勢控制對不同感覺的依賴程度,也會影響某些指標的敏感性。在正常放松狀態下本體感覺閾值和視覺閾值都足夠小,足以讓受試者感知到身體的搖擺,但在運動速度較高時閾值也升高(Fitz‐patrick et al.,1994),因而獲取身體位置和狀態信息也變得更有挑戰。
聽障組TTS的增加可能主要是由于TTR的增加。本研究發現,TTS與TTR有良好的正相關關系,而TTS與TQSP則只有微弱的相關。當受試者閉眼以他們喜歡的速度移動時,聽障組的過渡速度明顯慢一些。聽障與健全受試者達到一個新穩定點所需要的時間差在很大程度上取決于運動速度。然而,在新穩定點之后,聽障組在閉眼后的搖擺量顯著增加,提示,聽障受試者克服自主運動造成的姿勢擾動的能力下降。但只關注TTS可能會導致至少在某些情況下,在評估姿勢穩定性時產生誤解(Ding‐enen et al.,2015)。本研究還發現,兩組受試者在閉眼時,運動速度越快,TTR和TTS明顯越短。當以最快速度運動時,無論是睜眼還是閉眼,兩組間均未發現明顯差異。因此,當在最快速度條件下時,TTR和TTS可能不是識別聽障受試者的最佳參數。這也表明,聽障跆拳道運動員具有良好的適應機制,能根據不同的環境能做出不同的時空參數調整。
3.3 SLSP平衡能力分析
SLSP時,受試者面臨的主要挑戰是保持新平衡(Hodges,1997)。本研究測量了COP位移均方根值和速度均方根值來描述SLSP的姿勢穩定性。
在閉眼條件下,聽障組COP位移均方根值和速度均方根值顯著大于健全組。在此階段,連續的姿勢調整作為一種機制來平衡由隨意運動產生的反作用力(Memari et al.,2013)。有證據表明,一些聽覺損失的受試者使用增加肌肉剛度的策略來補償其前庭覺損失(Peterka,2002),肌肉緊張時感知腳踝運動的閾值明顯增加(Fitz‐patrick et al.,1994)。個人行為的調整會影響并調整感覺與運動之間的映射(Horak et al.,1997;Kuo,2005)。本研究受試者在單腿不穩定支撐條件下,踝關節本體感覺通道遭到一定程度破壞,尤其在失去視覺信息時,受試者對前庭覺利用加大,而聽障組無法從聽覺通道進行平衡信息補償,導致姿勢控制能力低于健全組。
Black等(1983)發現,前庭覺通常提供絕對的空間參考,以修正不準確的視覺和軀體感覺空間參考。Lund等(2010)發現,相同的前庭刺激會根據軀體感覺系統的狀態導致不同的姿勢反應。Inglis等(1995)發現,站在不穩定表面上的正常受試者對前庭電刺激的反應增強。當受試者同時做自主運動時,對電流的姿勢反應也更大(Brit‐ton et al.,1993;Gurfinkel et al.,1988)。Horak等(1994)研究表明,當受試者站在不穩定表面時,踝關節肌肉對頭部擾動的反應增加。這些證據表明,測試條件對前庭覺利用的重要性,當受試者沒有或不確定身體空間方位的體感信息時,對前庭信號的反應似乎會上升。一些對動物感官損失后的補償研究也表明,在失去一種感覺時,會發生前庭覺和本體感覺相互替代的現象(Britton et al.,1993;Dieringer et al.,1984;Pfaltz et al.,1973;Putkonen et al.,1977)。在人體實驗中,前庭功能受損會導致從足和頸部(頸-眼)獲得更強的軀體感覺信息(Bles et al.,1984),并在神經上適當地轉換各種感官信號,以便通過各種感官信息控制COP運動(Mergner et al.,1991,1997)。本研究認為,在閉眼單腿站立時,聽障與健全跆拳道運動員控制COP的能力有差異。雖然,Mittelstaedt(1998)研究表明,人體能夠接收源自非前庭系統的重力性刺激信號,Horak等(1986)也認為,前庭感覺系統和軀體感覺系統很可能存在類似于協調替代的復雜相互作用。但本研究結果提示,即使存在感覺之間的代償機制,聽障跆拳道運動員在閉眼單腿支撐的條件下也不能完全彌補因聽力損失導致的前庭覺缺失。事實上,支持面穩定時(如DLSP),健全受試者主要依賴體感信息來確定姿勢定向,前庭信息被認為只在支持面不穩定時用于后定位(Mergner et al.,1998)。因此本研究推測,閉眼DLSP穩定支撐狀態,主要依靠軀體感覺維持姿勢穩定,而SLSP非穩定支撐狀態,則更加依賴前庭信息來控制平衡,尤其在去除視覺信息時。
3.4 研究局限
TTS評估包含了人體姿態控制或恢復的動態部分和靜態部分。應注意到,很多時空參數不顯著可能由多種原因造成,限制人體不同的感覺可能會產生多種效果,然而對感官因素與運動表現之間的因果關系知之甚少,這需要在進一步的研究中加以探討。
本研究的一些局限性需要加以解決:1)由于沒有進行運動學測量,無法準確測量擺動腿的運動速度和運動位置,也無法驗證聽障運動員是否采用各種“平衡策略”;2)研究發現受試者的耐力及認知水平直接影響姿勢穩定性,TTS評估要求較高,耐力及認知水平較差的受試者不能很好地完成評估;3)受試者的依從性與自信心在評估過程中也起到非常重要的作用。綜上,在應用TTS評估姿勢控制過程中應對聽障受試者耐力、認知水平及心理因素有比較深入的了解。
4 結論與建議
4.1 結論
聽障跆拳道運動員睜眼條件下姿勢穩定性與健全跆拳道運動員的沒有差異(P>0.05),能夠較好地利用多感覺通道信息維持平衡,在閉眼條件下的姿勢穩定性要明顯弱于健全跆拳道運動員。聽障跆拳道運動員閉眼條件下SLSP的COP位移均方根值和速度均方根值都小于健全跆拳道運動員,在以偏好速度完成重心轉移時,聽障跆拳道運動員需更多的TTS達到穩定,更多的TTR進行姿勢調整。在DLSP向SLSP重心轉移過程中,TQSP不是區分穩定和不穩定受試者的敏感參數,相比之下,TTS、TTR以及SLSP的COP位移均方根值和速度均方根值能明顯區分為聽障與健全跆拳道運動員。
4.2 建議
由于本研究結果大多受擺動腿動作速度和幅度的影響,建議未來的研究在比較健全和聽障受試者的姿勢穩定性時,根據不同的專項技術來設計重心轉移的動作速度和幅度。TTS測試可能有助于識別聽障跆拳道運動員過渡任務后穩定缺陷,可以將這些信息將作為制定康復或訓練方案的依據。比如,通過聽障受試者恢復到動態姿勢穩定性基線的時間來判斷其是否處于良好的運動狀態。TTS測試也可用于康復和訓練。在運動中,大腦會從各種感覺信息輸入中選擇最重要的信息并做出相應地運動反應,并存入記憶,使有意識的隨意運動變成一種無意識的模式化運動(Mulder,1991;Shumway et al.,1995)。控制多種感覺輸入,受試者會做出相應地運動反應維持姿勢的穩定性,可以通過反復多次強化,直至形成模式化運動,從而提高聽障運動員的平衡能力,進而改善運動表現。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19