非合作目標動態RCS特性的實時估計方法
2022-05-06 04:56:30吳元偉劉廣君
艦船電子對抗 2022年2期
吳元偉,劉廣君,2
(1.中國空空導彈研究院,河南 洛陽 471009;2.航空制導武器航空科技重點實驗室,河南 洛陽 471009)
0 引 言
雷達截面(RCS)是與測量雷達波段、極化、目標運動姿態相關的物理量,RCS測量與評估是雷達目標特性研究的主要內容。動態RCS特性的描述包含目標運動的俯仰、方位、橫滾姿態信息,在計算目標的極化矩陣、探測和識別目標類型、判斷目標攻擊態勢方面有十分重要的應用。
在現代空戰中,敵方目標的氣動、散射特性未知,是典型的非合作目標。交戰雙方在預警機或機載雷達的指引下發現目標,鎖定目標。根據敵機的動態目標RCS的信息可以優化作戰方案,提前占位,以更好地發揮我方武器裝備的作戰性能,提高對敵方目標攔截的成功率。但在交戰前,很難得到非合作目標的準確RCS特性信息,嚴重地限制了武器裝備性能的發揮。因此,研究非合作目標的動態RCS特性測量方法是很有必要的。
目標的RCS特性主要通過實測和建模仿真兩種方法獲得,傳統的測量方法對于非合作目標無法實現。近年來,對于中段彈道、飛機、衛星等飛行器,通過建模和電磁計算的方法,對目標的動態RCS分布特性進行了仿真和統計分析。文獻[6]提出了基于航跡的飛機姿態角估計方法,但缺乏從戰場態勢感知方面對非合作目標的動態RCS特性進行實時評估的方法。
本文以空戰三維動態仿真為場景,提出了一種以雷達測量信息為基準,估計非合作目標的實時飛行態勢,評估其動態RCS的方法。
1 動態RCS估計方法
目標的動態RCS特性的描述包含目標運動的俯仰、方位、橫滾姿態以及對應的RCS數據。對于非合作目標的雷達量測信息,以測量雷達所在的慣性坐標系為基準,目標的相對位置為:
()=((),(),())
(1)
目標的速度為:
()=((),(),())
(2)
據此估算目標動態RCS特性的方法如下。
1.1 目標RCS估計原理
估算目標RCS的原理是雷達方程,需要提前對測量雷達不同模式、不同工作狀態下的信號回波進行校正,以脈沖多普勒雷達為例,在距離處的RCS為的目標,其信噪比為:

(3)
式中:為天線峰值功率;為雷達發射波形占空比;為天線增益;為工作波長;為天線罩單程透過率;為波爾茲曼常數1.38e;為常溫290 K;為信號處理帶寬;為雷達噪聲系數;為系統損失;為波段電磁波在大氣中的單程衰減系數;為雷達的熱噪聲本底。
對于非合作目標,測量其在距離處的目標,假設在工作過程中,雷達輻射功率、收發增益、信號處理損失等條件的變化可以忽略,則根據雷達方程,可以計算出對應距離=1 m處目標的信噪比S/N。據此得到非合作目標RCS的序列為:
=·S/N
(4)
1.2 目標姿態估計方法
由于非合作目標的結構、氣動特性未知,因此假設目標為六自由度剛體,目標軸向與速度方向一致,依據飛行器的動力學模型和雷達測量得到的軌跡信息,可以計算目標的近似姿態角。
目標俯仰角計算公式為:

(5)
當()+()≠0時,目標方位角為:
()=arctan2((),()),-π≤≤π
(6)
根據目標的動力學模型,目標的橫滾角滿足以下公式:
(7)
式中:()、()分別為目標在方位和俯仰向運動的角速度,可以得到:

(8)

與公式(6)類似,由此可得目標的橫滾角()。
假若在=時刻,()+()=0,目標在水平面上的速度為0,該狀態是瞬時的,定義:

(9)
根據公式(5)、(6)、(7)可以求得目標的姿態序列,但由于目標的航跡是雷達量測結果根據航跡通過差分方式計算得到的,姿態角序列起伏較大,可以通過卡爾曼濾波實現對目標姿態的平滑和實時預測。
1.3 目標動態RCS特性估計
由于目標姿態是在測量雷達所在的慣性坐標系進行計算的,為了將目標運動姿態與RCS進行關聯,需要將目標相對雷達的位置轉換到目標機體坐標系,從而得到雷達視線在目標機體內的入射角度。
根據估計得到的目標機體的姿態,可得慣性坐標系至機體坐標系的轉換矩陣分別為:
(10)

(11)

(12)
據此計算雷達視線在目標坐標系的矢量為:
()=()
(13)
進而得到雷達視線在目標坐標系的極坐標位置為:
()=((),(),())
(14)
式中:()、()為雷達視線入射的俯仰、方位角序列。
根據得到的RCS序列,整理得到雷達入射角度-RCS關系,從而得到目標的動態RCS特性,用于對目標進行識別,對作戰方案進行規劃決策。
2 仿真驗證
以下利用某型雷達產品在掛飛試驗中測量得到的目標信息,結合試驗獲得的目標的真實GPS位置與姿態信息,對本文目標動態RCS特性估算方法的有效性進行驗證。試驗中目標相對于雷達運動的航跡如圖1所示,目標在雷達前方約25 km、下方約1.5 km、左方1.8 km處向雷達飛行,在距離接近的過程中同時做S機動,S機動的角度約為±30°。

圖1 目標運動航跡
利用雷達測量的目標位置和速度信息,計算得到其俯仰、方位和橫滾角如圖2、圖3和圖4所示。由圖中可以發現,俯仰角的估算值與真值的差異較明顯,這是由于目標運動過程中垂直方向的速度分量較低,使測量形成的誤差消除較慢。目標機動時三維姿態估值的變化都滯后于真實信息,這是因為物理上目標機動時是姿態先作出調整,后續才反映在目標速度的變化上,而目標姿態的估算方法利用的是位置和速度的差分信息,由果推因,需要目標運動產生一定的變化量后才能顯現出來。該滯后效應在橫滾角的估值中更加明顯,因為橫滾角的估值用到了位置的二階差分,其估值的離散性也更大。
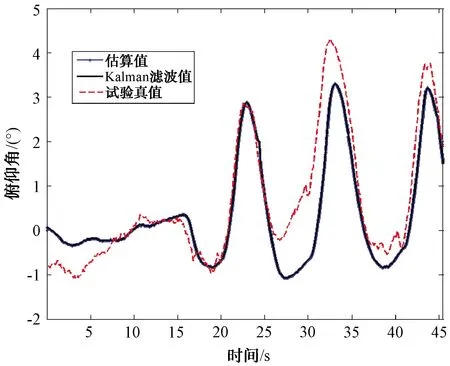
圖2 目標運動俯仰角估值與真值對比

圖3 目標運動方位角估值與真值對比
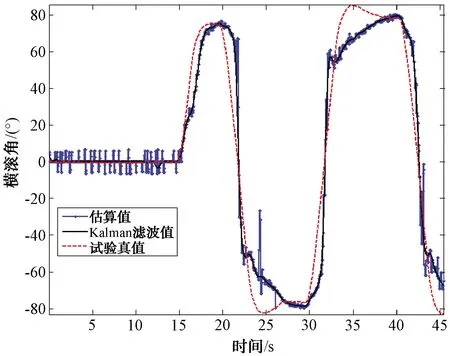
圖4 目標運動橫滾角估值與真值對比
另外,對非合作目標姿態估算時,假設目標的速度方向與其軸向一致,而實際飛行器機動時的氣動過程決定了其速度方向與軸向必然存在一定的攻角,也將導致該滯后現象的產生。總體上,目標姿態的估計值與真實值吻合得較好,算法的有效性得到了驗證。由圖中也可以發現,Kalman濾波能夠很好地實現對目標姿態信息的平滑和預測。
根據雷達對目標測量的信噪比以及標定后的雷達狀態參數,估計得到該目標的RCS序列如圖5所示,目標機動過程中姿態變化引起RCS的起伏大于10 dB。

圖5 估計得到的目標RCS-時間序列
估計得到目標的姿態數據后,根據雷達測量得到的目標位置坐標,通過坐標轉換至目標機體坐標系內,計算得到雷達入射的俯仰和方位角,如圖6所示。結合目標RCS的時間序列,得到目標的動態RCS特性。

圖6 估計得到的目標RCS-時間序列
改變雷達的波形可以獲得目標不同維度的特征信息,通過長時的觀測積累可構建非合作目標的運動特征模型、RCS特征庫,用于對非合作目標的識別,對目標態勢的評估,對作戰方案的決策。對于合作目標,該方法也可應用于對目標RCS建模仿真結果的驗證。
3 結束語
戰場環境中非合作目標的飛行姿態以及其動態RCS的實時估計對于戰場態勢的綜合感知十分重要。本文基于雷達對非合作目標的測量信息,提出了對目標的姿態進行實時估算和預測的方法,進一步得到目標的動態RCS。通過飛行試驗結果的分析,驗證了算法的有效性。
本文提出的算法對于雷達的平臺、雷達波形無使用限制,可應用于戰斗機、預警機、岸基或艦載雷達對目標的跟蹤與數據分析,構建目標的多維RCS特征樣本庫,用于戰場目標識別和態勢評估。但由于算法依賴目標測量信息的準確性,干擾環境下有效信息的篩選以及算法的適用性有待進一步研究。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28