新型海生物捕撈機器人系統設計
2022-05-12 01:26:16張繼威于復生雋志龍魏井波范銀輝
制造業自動化 2022年4期
張繼威,于復生,雋志龍,魏井波,范銀輝
(山東建筑大學 機電工程學院,濟南 250101)
0 引言
目前在國內海參、海膽等海生物的捕撈工作依舊主要由人力來完成,這種捕撈方式不僅會隨著氣溫的降低而增加人工下潛的困難程度,且長期從事此項工作則會對捕撈者自身健康造成影響。近年來研究人員水下機器人進行了廣泛研究,故在海生物捕撈領域產生了一些海生物捕撈機器人,但對其研究主要基于吸取式與手爪抓取式來進行開展[1~5],這兩種捕撈方式只能實現單個海生物順次捕撈,導致其捕撈效率低下。因此,在此基礎上設計了一種新型海生物捕撈機器人,該裝置采用履帶輪、螺旋槳混合驅動,通過拔取式爪手進行捕撈工作,此種捕撈方式單次動作即可實現小范圍內海生物一次性捕撈,該裝置的設計不僅為海生物捕撈機器人的設計提供了一種新的思路,且在較為平坦的海域及海洋牧場或是近海養殖區域應用將會提高海產品的捕撈效率。
1 機械結構設計
常見水下機器人形體結構主要有框架型、流線型兩種[6],框架型水下機器人空間布置比較自由,對水下海生物捕撈與收集來說最為適用。
海生物捕撈機器人的機械結構部分主要由履帶輪組件、車架底盤、驅動馬達、浮力材料、浮力控制裝置、攝像裝置、電子密封艙、收集筐組件、水下電動推桿、車體框架及拔取組件組成,各部件連接關系如圖1所示。

圖1 海生物捕撈機器人結構示意圖
整體設計的工作原理為:當裝置開始工作時,通過推進器配合浮力控制裝置使水下機器人下潛至待工作區域,通過上位機軟件觀察海生物的位置,控制履帶輪移動至捕撈區域,此時控制豎置電動推桿使收集筐降至地面,收集筐組件前蓋固接在車體框架上表面,故此時筐體與前蓋錯開空間,舵機配合電動推桿動作使拔取爪手完成海生物歸攏及抓取工作,同時收集筐組件采用柔性蒙皮框底,可以通過海生物的自重使框底呈凹陷狀,有效防止海生物因海流等因素掉至筐外。
1.1 推進系統
傳統水下機器人的推進系統通常由多螺旋槳推進器構成,通過控制核心合理分配推力從而實現水下推進。而對于本設計來說,工作環境主要為養殖區域、海洋牧場或是近海領域,故采用兩組驅動馬達帶動履帶輪實現水下推進,履帶輪不僅可以用于海底越障行走,而且還可以配合浮力材料有效實現整體配重,此外通過螺旋槳推進器配合浮力控制裝置可以有效實現水下機器人的上浮及下潛動作,浮力控制裝置結構如圖2所示,螺旋槳推進器采用雙平行正反槳方式布置,其布置方式及推進時本體受力情況如圖3所示。
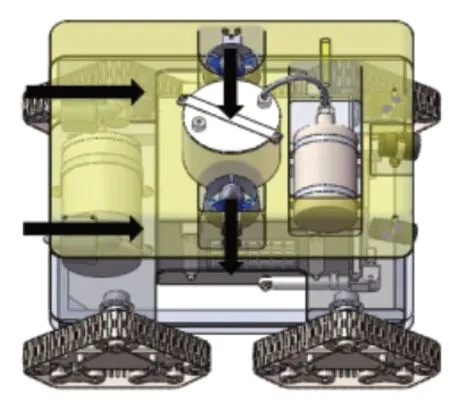
圖2 推進系統布置圖

圖3 浮力控制裝置結構圖
當裝置開始下潛時,打開氣閥,適當釋放氣室中的氣體,同時打開水閥使海水進入氣室,配合螺旋槳推進器使機器人下潛,當裝置沉到水底時,再打開氣閥適當釋放氣室中的氣體,使機器人減小浮力,從而增加其穩定性,在機器人捕撈完成上浮時,打開電磁三通閥,而后打開水閥,使高壓氣體充滿氣室,增大浮力,從而配合螺旋槳推進器實現上浮動作。
1.2 關鍵部件校核
電子密封艙是裝載水下機器人控制系統和電子元器件的重要部件,其強度和穩定性必須滿足要求[7,8],當耐壓殼體發生屈曲失穩時,其主應遠小于屈服應力[9],故應重點校核其穩定性。而對于本設計來說,基于圓柱形耐壓殼因其良好的承載能力、結構強度及高的空間利用率等特點[10,11],選用圓柱形電子密封艙,其整體結構如圖4所示。因電子密封艙兩端采用圓形端蓋及法蘭密封,法蘭的設置增強了端蓋的穩定性,故重點通過理論計算及有限元分析校核其艙體穩定性。
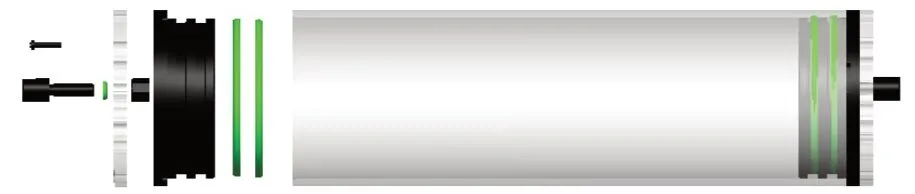
圖4 電子密封艙結構圖
耐壓殼體的壁厚和殼體長度決定了抗失穩能力的大小[12],考慮到密封艙空間及端蓋處采用螺栓固定等問題,初步設計艙體壁厚δ為5mm,外徑D為160mm,長度L為300mm。受外力的圓柱型殼體可分為長圓筒與短圓筒[13],通過代入判別公式求得Lcr為1059mm,由此可知該艙體為短圓筒。

對于短圓筒來說,需考慮邊界條件對臨界壓力的影響[14],現有的簡化公式的計算結果雖然可以滿足工程要求,但都是基于鋼材的泊松比進行簡化的,對于本設計來說材料選用為有機玻璃,其泊松比為0.38,彈性模量為3000MPa,波形n取3,采用Mises公式進行計算。
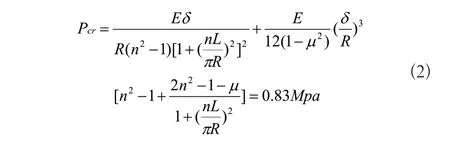
該裝置最大設計深度為50 m,故工作壓力P取0.5MPa,根據英國勞氏規范取安全系數為2.5,則0.83/0.5≈1.66<2.5,故不符合安全要求,則取艙體壁厚為6mm,求得臨界壓力Pcr=1.39MPa,則1.39/0.5≈2.78>2.5,故符合安全要求。
進一步通過有限元軟件分析艙體的穩定性。將有機玻璃材料屬性添加至材料庫,網格大小設置為2mm,網格單元選擇六面體solid186單元,通過掃略方式進行網格劃分,考慮到艙體兩端通過螺栓與端蓋進行固定,則邊界條件設置為兩端簡支約束,即除一端留有軸向位移外其他自由度均約束,對艙體外表面施加0.5Mpa壓力,進行特征值屈曲分析求得一階模態變形云圖如圖5所示。

圖5 艙體特征值屈曲分析
由圖5可以看出,失穩時最大位移發生在艙體中部,且出現褶皺,波形為3個,符合短圓筒側向失穩特征,最大位移值仍在材料的延伸極限內,其臨界壓力為2.937×0.5=1.46Mpa,與理論計算值較為接近。
非線性屈曲分析較線性屈曲分析考慮了邊界條件、初始缺陷以及材料非線性等因素,結果更具有工程意義[15],故引用特征值屈曲分析一階模態作為結構缺陷,取缺陷因子為0.1,進行非線性屈曲分析,為減小計算量,且保證仿真結果的精確性,步長設置為10,子步設置為200,仿真結果如圖6所示。

圖6 非線性屈曲分析變形曲線
當壓力達到了1.41MPa時出現拐點,即此處發生失穩,故其臨界壓力為1.41MPa,此結果更接近于理論計算結果。綜上分析,通過有限元分析結果與理論計算結果相對比,證明了有限元分析的可靠性,且通過結果可以看出艙體穩定性滿足要求。
2 控制系統結構設計
水下機器人的核心是其控制系統,需要具有通信、傳感器信息采集及運動控制等功能[16~18]。本設計控制系統分為水上控制部分及水下控制部分,其中水上控制部分由上位機、遙控手柄、電量檢測模塊、蓄電池、上電力載波模塊及圖像顯示卡組成,水下控制部分由主MCU、電源模塊、下電力載波模塊、傳感器模塊、照明觀測模塊、驅動模塊及執行模塊組成。其總體結構如圖7所示,其主控制程序流程如圖8所示。
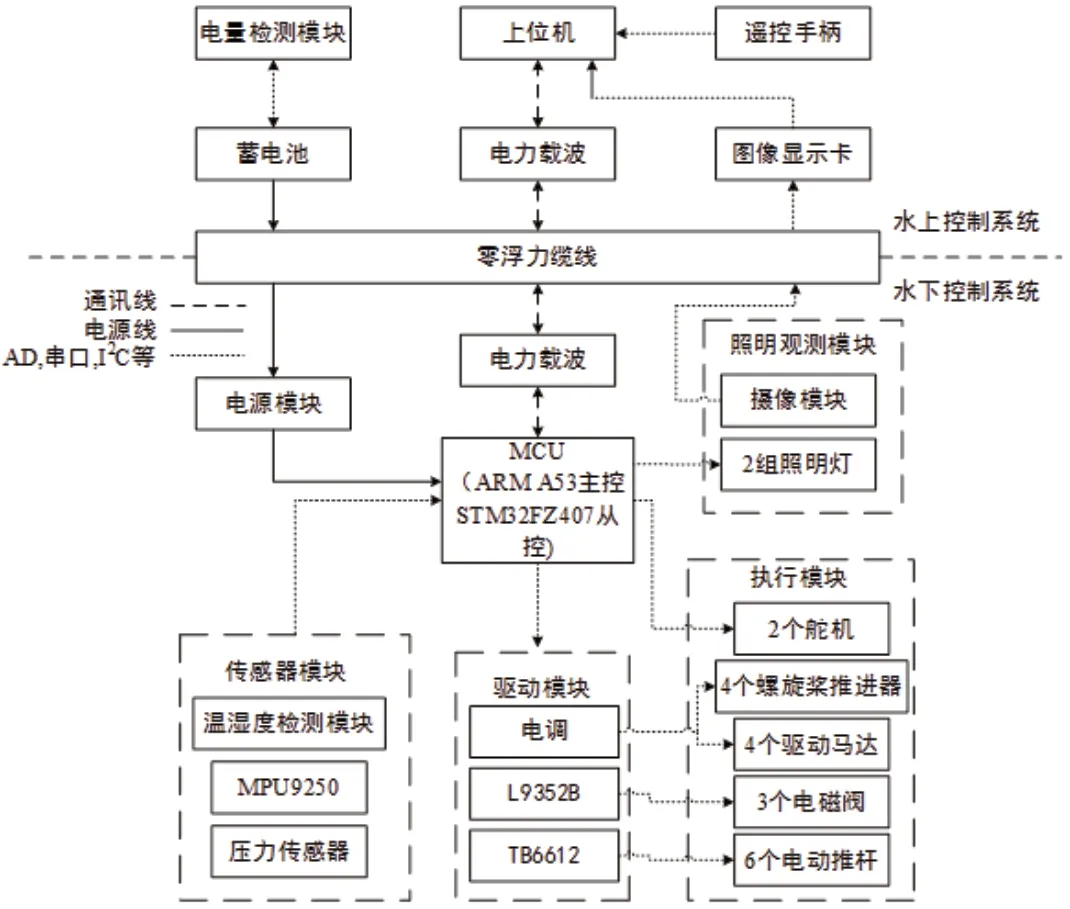
圖7 控制系統結構圖

圖8 主控制程序流程圖
MCU采用ARM Cortex-A53主控STM32F407從控式嵌入式系統,其主要負責傳感器的采集數據及濾波、機器人本體姿態控制、照明燈控制及上位機通訊等工作。其中STM32F407系列單片機內部封裝有多個定時器,通過內部定時器輸出PWM波經電調模塊驅動舵機、螺旋槳推進器及驅動馬達,經I/O口驅動芯片TB6612、L9352B實現電動推桿及電磁閥的控制。
蓄電池通過電量檢測模塊實時檢測運行狀態,經零浮力線纜接電源模塊實現水下供電。
傳感器模塊主要負責水下實時狀態信息采集。其中MPU9250傳感器內部集成了三軸陀螺儀、三軸加速度傳感器及三軸磁力計,具有良好的動態響應特性;壓力傳感器選用MS5837,其提供高精度24位壓力和溫度數學傳輸,且防水性能優異;溫濕度傳感器選用DHT11,其具有高的可靠性和穩定性。MPU9250傳感器、壓力傳感器及濕度傳感器經I2C總線及單總線實現數據傳輸。
3 結語
基于目前海生物捕撈領域存在的問題,以實用性及提高捕撈效率為出發點設計了一種新型履帶式海生物捕撈機器人,對機械結構及其控制系統進行了闡述,通過對該裝置的關鍵部件校核,確保了海生物捕撈機器人水下安全運行。
本設計提出了一種新型捕撈形式,且解決了海生物捕撈領域存在的難題,為海生物捕撈機器人的研究提供了一個新的研究平臺,并為其發展提供了一定的參考作用。目前國內海生物捕撈機器人的研究仍處于初期階段,下一步將在此基礎上重點進行自主目標識別控制的應用,從而進一步提高其自動化程度。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
科學大眾(2021年9期)2021-07-16 07:02:54
軍事文摘(2020年20期)2020-11-28 11:42:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
航空世界(2020年10期)2020-01-19 14:36:20
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
