輸電線路導線斷股和表面損傷識別技術
2022-05-25 08:16:22曾軍趙子根劉景立劉宏君曹磊耿少博萬紅艷
哈爾濱理工大學學報 2022年2期
關鍵詞:輸電線路
曾軍 趙子根 劉景立 劉宏君 曹磊 耿少博 萬紅艷
摘要:為找出輸電線路中潛在的斷股導線和表面損傷故障并防止其進一步惡化,提出了一種基于無人機巡檢的輸電線路導線斷股和表面缺陷的識別方法。首先,通過無人機獲得導線圖像;然后,在通過灰度方差歸一化方法(GVN)進行增強處理之后,通過自適應閾值分割來提取導線區域。其次,通過其灰度分布曲線的方波變換(SWT)檢測導線斷股。同時,通過導線區域的GVN圖像的投影算法來識別導線表面缺陷。最后,計算斷股數并分割得到可疑缺陷,獲得最終的故障診斷結果。通過一系列實驗分析了該技術的性能,結果表明該方法可以測量導線斷股和表面缺陷故障,平均準確度分別為90.45%和92.05%。
關鍵詞:關導線斷股;表面缺陷;圖像處理;輸電線路
DOI:10.15938/j.jhust.2022.02.016
中圖分類號: TM726.4
文獻標志碼: A
文章編號: 1007-2683(2022)02-0122-11
A Recognition Technology of Transmission Lines
Conductor Break and Surface Damage
ZENG Jun ZHAO Zi-gen LIU Jing-li LIU Hong-jun CAO Lei GENG Shao-bo WAN Hong-yan
(1.Baoding Power Supply Company of SGCC, Baoding 071000; 2.CYG SUNRI CO., LTD. Shenzhen 518057;
3.State Grid Hebei Electric Power Limited Company, Shijiazhuang 050021)
Abstract:In order to find out the potential strands break and damage faults and prevent its further deterioration, a recognition method of conductor break and surface defects in transmission lines′ unmanned aerial vehicle (UAV) inspection is presented in this paper. First, a conductor image is obtained by the UAV image acquisition system, and then, the conductor region is extracted by the adaptive threshold segmentation after the enhancement processing by the gray variance normalization method (GVN). Second, the conductor break is detected by the square wave transformation (SWT) of its grayscale distribution curves, which is simple and effective. Meanwhile, the conductor surface defects are identified by the projection algorithm of the GVN image of the conductor region. Finally, calculating the number of broken strands and filtering the suspect defects, the final fault diagnosis results can be obtained. We analyze the performance of the technology by a series of experiments, and the results show that the proposed method can measure the conductor break and surface defects faults with the average accuracy of 90.45% and 92.05%, respectively.
Keywords:conductor break; surface defects; image processing; transmission lines
0引言
鋼芯鋁絞線(aluminum conductors steel-reinforced,ACSR)作為高壓輸電線路的重要組成部分,起著輸送電能和耐受機械強度的雙重作用。由于長期暴露在野外環境中,受風力、覆冰、導線舞動、環境侵蝕等影響,ACSR容易發生各種類型的損傷,從表面損傷到局部斷裂,進而發展為整個鋼芯鋁絞線的斷股[1-4]。鋁絞線損壞后,承載能力降低,導線斷股風險增大,對導線、輸變電設備和人身安全構成潛在風險[5,6]。
為了有效地提高輸電線路的運行效率,降低故障頻率,國內外許多研究機構對輸電導線的組成材料、故障機理和運行狀態進行了大量的研究[1,7-12],取得了一些研究成果,如輸電導線組成材料的改進、導線表面損傷的微觀變化過程、斷線的故障檢測等。這些方法主要從材料和機理上進行預防,對運行中導線存在的斷股、破損等問題主要采用人工檢測,這種方法費時、準確度低、安全性差。
近年來,隨著航空圖像傳感器和計算機視覺技術的飛速發展,無人機檢測技術在輸電線路中得到了廣泛應用。研究學者提出了不同的算法用于航空圖像中的輸電線路檢測和提取[13-15],也有學者則聚焦在航空絕緣子圖像的分割和故障檢測算法以及高壓線路鳥巢的檢測[3,16,17]。此外,視覺技術也被用于焊道和軌頭的缺陷檢測,以及金屬導線鋪設長度的測量[18];然而,由于圖像采集的局限性以及硬件條件影響,目前視覺算法還未應用于導線斷股和缺陷監測。
本文提出了一種基于航空圖像處理的輸電線路斷股和缺陷的測量方法,該方法利用航空視覺系統和圖像處理算法,獲取導線的斷股和其他缺陷信息。視覺系統獲取輸電導線圖像的多個視圖,用于提取導線不同區域。通過分析導線區域灰度分布信息,可以利用所提出的Z形波形模型對導線斷股進行分析,利用導線區域投影算法對導線表面缺陷進行檢測,實現了輸電導線的斷股和缺陷監測。
1輸電線路導線斷股與缺陷檢測技術
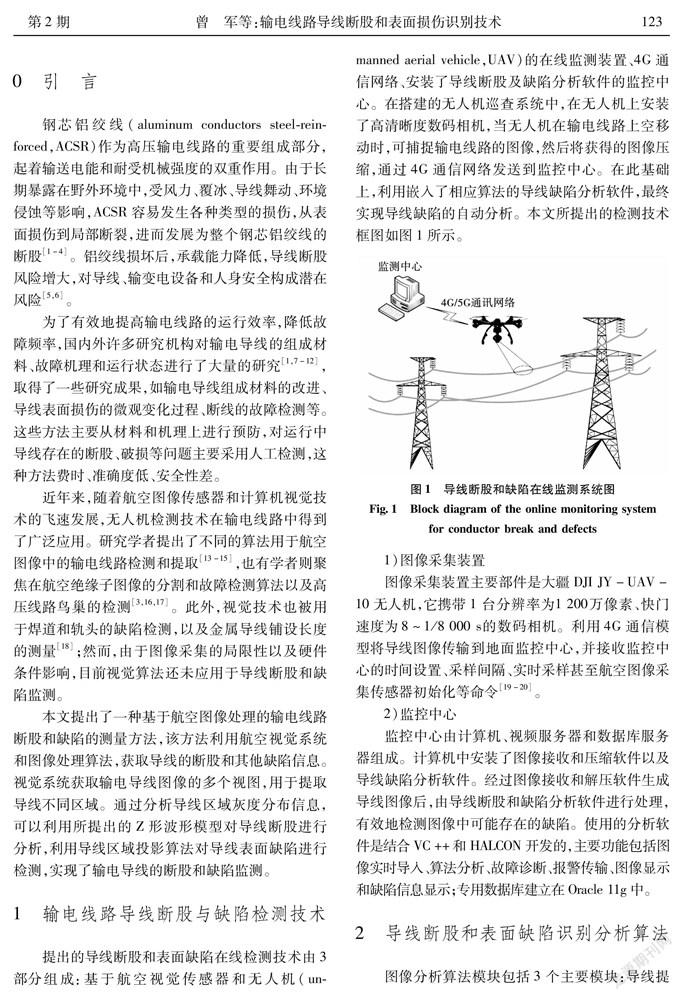
提出的導線斷股和表面缺陷在線檢測技術由3部分組成:基于航空視覺傳感器和無人機(unmanned aerial vehicle,UAV)的在線監測裝置、4G通信網絡、安裝了導線斷股及缺陷分析軟件的監控中心。在搭建的無人機巡查系統中,在無人機上安裝了高清晰度數碼相機,當無人機在輸電線路上空移動時,可捕捉輸電線路的圖像,然后將獲得的圖像壓縮,通過4G通信網絡發送到監控中心。在此基礎上,利用嵌入了相應算法的導線缺陷分析軟件,最終實現導線缺陷的自動分析。本文所提出的檢測技術框圖如圖1所示。
1)圖像采集裝置
圖像采集裝置主要部件是大疆DJI JY-UAV-10無人機,它攜帶1臺分辨率為1 200萬像素、快門速度為8~1/8 000 s的數碼相機。利用4G通信模型將導線圖像傳輸到地面監控中心,并接收監控中心的時間設置、采樣間隔、實時采樣甚至航空圖像采集傳感器初始化等命令[19-20]。
2)監控中心
監控中心由計算機、視頻服務器和數據庫服務器組成。計算機中安裝了圖像接收和壓縮軟件以及導線缺陷分析軟件。經過圖像接收和解壓軟件生成導線圖像后,由導線斷股和缺陷分析軟件進行處理,有效地檢測圖像中可能存在的缺陷。使用的分析軟件是結合VC++和HALCON開發的,主要功能包括圖像實時導入、算法分析、故障診斷、報警傳輸、圖像顯示和缺陷信息顯示;專用數據庫建立在Oracle 11g中。
2導線斷股和表面缺陷識別分析算法
圖像分析算法模塊包括3個主要模塊:導線提取、導線斷股檢測和表面缺陷識別。
2.1導線提取
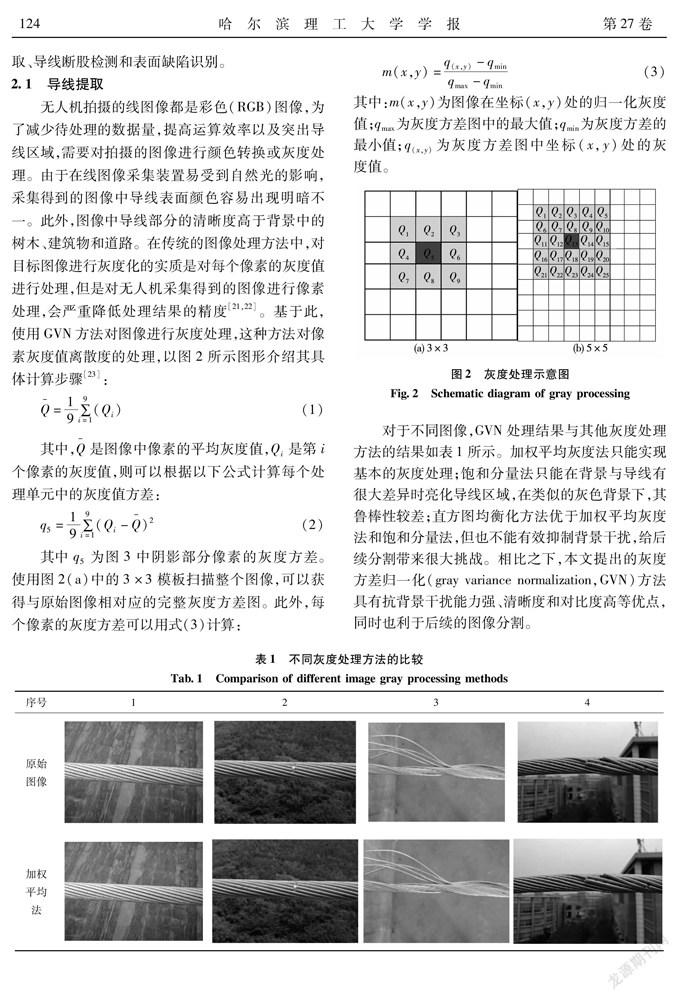
無人機拍攝的線圖像都是彩色(RGB)圖像,為了減少待處理的數據量,提高運算效率以及突出導線區域,需要對拍攝的圖像進行顏色轉換或灰度處理。由于在線圖像采集裝置易受到自然光的影響,采集得到的圖像中導線表面顏色容易出現明暗不一。此外,圖像中導線部分的清晰度高于背景中的樹木、建筑物和道路。在傳統的圖像處理方法中,對目標圖像進行灰度化的實質是對每個像素的灰度值進行處理,但是對無人機采集得到的圖像進行像素處理,會嚴重降低處理結果的精度[21,22]。基于此,使用GVN方法對圖像進行灰度處理,這種方法對像素灰度值離散度的處理,以圖2所示圖形介紹其具體計算步驟[23]:
其中q為圖3中陰影部分像素的灰度方差。使用圖2(a)中的3×3模板掃描整個圖像,可以獲得與原始圖像相對應的完整灰度方差圖。 此外,每個像素的灰度方差可以用式(3)計算:
其中:m(x,y)為圖像在坐標(x,y)處的歸一化灰度值;q為灰度方差圖中的最大值;q為灰度方差的最小值;q為灰度方差圖中坐標(x,y)處的灰度值。
對于不同圖像,GVN處理結果與其他灰度處理方法的結果如表1所示。加權平均灰度法只能實現基本的灰度處理;飽和分量法只能在背景與導線有很大差異時亮化導線區域,在類似的灰色背景下,其魯棒性較差;直方圖均衡化方法優于加權平均灰度法和飽和分量法,但也不能有效抑制背景干擾,給后續分割帶來很大挑戰。相比之下,本文提出的灰度方差歸一化(gray variance normalization,GVN)方法具有抗背景干擾能力強、清晰度和對比度高等優點,同時也利于后續的圖像分割。
基于GVN的處理結果,采用自適應閾值分割結合形態學的方法對導線進行分割。與基于普通灰度處理或增強圖像的分割方法相比,該方法對導線的分割效果更好。
4幅圖像在不同條件下的分割結果如表2所示。基于灰度或增強處理的圖像分割結果顯示在第三列,分割結果中仍然有一些背景噪聲,并且部分圖像分割不完整。而基于GVN方法的4幅圖像分割效果都比較理想,可以有效避免外界因素的影響。
2.2導線斷股檢測
導線部分分割完成后,可著重分析沒有背景干擾的導線圖像,提取的導線圖像需映射回其GVN圖像,因為GVN圖像上的灰度分布是導線斷股檢測的重要參數。以圖3為例深入分析導線斷股檢測方法,主要分為3步:灰度分布提取、方波變換和斷股識別。鋁絞線的灰度分布直接反映了導線表面的完整性,使用方波變換(the square wave transformation,SWT)可突出其灰度分布的周期性[24]。最后,通過分析所獲得的各Z形波形的寬度,得到傳輸導線斷股的情況。
2.2.1灰度分布提取
如圖3所示,每根導線表面的灰度值均高于之間空隙的灰度值,根據鋼芯鋁絞線的結構,最外層未斷股導線表面的灰度分布將呈現完整的“循環”特征。由于不同層的鋁絞線纏繞方向相反,纏繞角度不同,一旦發生導線斷股,不僅使導線斷股處隆起或與原導線分離,而且使內部鋁絞線裸露出來,此時將導致外層鋁絞線橫向間距發生變化,由于導線斷股使得內層鋁絞線裸露,此處灰度值較低,將進一步破壞原有的灰度值周期性特征。
基于上述分析,將導體斷股檢測轉化為導體表面灰度分布的周期性檢測。首先,通過最小二乘法(least square fitting,LSF)擬合得到導線的中心軸,如圖4所示。
由于斷股的導線沒有完全從內層導線上散開,僅在中心軸上檢測斷股導線是不夠的。因此,首先得到導體直徑所占據的像素數,然后分別提取導線厚度為1/4、1/2和3/4軸上的灰度值分布。由于輸電導線常年裸露,受各種噪聲的影響,導線表面的高灰區常出現一些低灰點。這將影響循環灰度值分布的準確提取,導致斷股的檢測錯誤。因此,在提取各軸上的灰度值分布時需要進行中值濾波處理,最終結果如圖5所示。
2.2.2方波變換
2.2.3斷股識別
為了清楚地描述每個Z形波形的寬度變化,有必要對每個Z形波形的寬度p進行統計分析。各軸的統計結果如圖7所示。
圖7中,x坐標表示每個Z形波形的標記號,y坐標表示每個Z形波形的寬度(以像素為單位)。在圖7中,大多數Z形波形寬度接近,代表導線未出現斷股。此外,部分Z形波形的寬度比未斷股處的鋁絞線要大或小得多。
基于上述觀測結果,Z形波形的寬度可以用來區分導線斷股區和導線未斷股區。因此,獲得單根未斷股導線的水平寬度尤為重要,可進一步測量斷股絞線的數量。
根據攝像機標定,可獲得單根鋁絞線直徑寬度所占用的像素數,如圖8中的w所示。假設外層鋁絞線以α角度進行纏繞(忽略其微小變化),單根鋁絞線的水平寬度,即圖8中的l可以表示為w/sinα。
在上述分析的基礎上,以w/sinα為基準,根據實際需要選擇合適的檢測精度υ。
如果Z形波形的寬度滿足|P-w/sinα|SymbolcB@υ,其中P表示第i個Z形波形的寬度,則它被識別為導線未斷股;反之,如果Z形波形的寬度滿足|P-w/sinα|>υ,則認為導線波形異常,存在斷股現象。
此外,為了直觀獲得斷股Z形波形的寬度變化,可對相鄰異常波形的寬度求和:將圖7中相鄰異常波形的寬度疊加,結果如圖9所示。其中x軸代表疊加后Z形波形,y軸代表增強處理后Z形波形的寬度分布,單位仍為像素。
根據圖9,經過相鄰異常波形寬度疊加后,結果出現明顯的峰值,與可疑斷股的位置一致,斷股數越多,其峰值越大。此外,假設圖10中H代表第k個可疑斷股區域的寬度,可從y軸讀取具體的寬度值。l表示導線斷股數目,則l可表示為l=|H/|w/sinα||,其最大值l是鋁絞線實際斷股數。例如,根據圖9(b)w/sinα約為100像素,峰值約為228像素和200像素的點位疑似斷股區域,則可確定在中心軸上有2個位置出現斷股。結合1/4厚度和3/4厚度軸的分析結果,可以綜合確定斷股的位置和數量。
2.3導線缺陷識別
將導線的分割結果映射到其GVN圖像,結果如圖10所示。對比圖10(a)和圖10(b),可以觀察到在導線的GVN圖像中,導體表面存在表面缺陷的灰度值比其他區域的更高,并且缺陷的像素聚集在一起。因此,如果缺陷部位呈縱向分布,則列方向上的歸一化灰度方差值之和將較大。類似地,如果缺陷呈橫向分布,則局部區域的行方向上的和也將變大,基于此提出了PGVN算法。
PGVN算法包括3個主要步驟:垂直投影、局部水平投影和缺陷識別。首先,分析導體區域GVN圖像的垂直投影,定位缺陷的水平可疑位置;其次,分析第一步得到的局部圖像的水平投影;最后,根據前面兩步及濾波處理,用矩形標識每個可疑缺陷位置。
2.3.1垂直投影
針對圖10(b)中導體的GVN圖像,其垂直投影的具體計算過程為:
其中F(x,y)為坐標(x,y)處的歸一化灰度方差值;m表示每列中F(x,y)的總和。
垂直投影的結果如圖11(a)所示,其中包括許多局部峰值。局部小峰值主要由噪聲引起,需要通過中值濾波進行平滑處理。圖11(b)給出了圖11(a)的平滑結果。
為了明確缺陷的可疑位置,對垂直投影的結果進行閾值化處理,其中閾值T被設置為垂直投影中最大和最小灰度值的平均值,即T=(M′+M′)/2。如果m大于T,則顯示其閾值T的差值;否則顯示為零,如圖12所示。
此外,對圖12中的結果進行高通濾波處理,濾波寬度設置為單股鋁絞線的半徑r。如果水平軸上峰值的像素范圍小于r,則將其過濾掉;否則保持原值。
2.3.2局部水平投影
局部水平投影與垂直投影類似,只是水平投影是通過分析由上述垂直投影確定的局部子圖像中每行的歸一化灰度方差值之和來執行的。
首先,通過下式給出其水平投影的具體計算過程:
其中:F(x,y)為坐標(x,y)處的歸一化灰度方差值;m表示每行中F(x,y)的總和。將m經過中值濾波平滑處理。
其次,按照m的處理順序,利用閾值高通濾波和缺陷標記對m進行處理。最后,根據高通濾波結果對應的水平坐標,得到可疑缺陷的起始位置和終止位置。
2.3.3缺陷識別
3導體表面缺陷檢測算法性能測試
主要分析了導線斷線檢測算法和導線表面缺陷識別算法的性能。測試中使用的所有圖像均是使用無人機拍攝的實際輸電線路的圖像。
3.1導線斷線檢測算法性能測試
3.1.1算法驗證
為了系統地驗證本文提出的導線斷線檢測算法的有效性和實用性,以2幅現場圖像為例進行了處理和分析,一幅是三股鋁絞線斷裂的導線損傷圖像,另一幅是未斷股的導線圖像。檢測處理的流程圖如圖15所示。
原始圖像如圖15(a)所示。圖15(b)是各圖像的導體區域的中心軸提取結果。圖15(c)顯示了導體3個橫向軸上的灰度值分布圖。可以觀察到,未斷股導體軸上的灰度值分布具有完美的周期性特征。
對于斷股導線,當軸線穿過未損傷部分時,其灰度值仍呈一定的周期性分布;當軸線穿過斷股鋁絞線區域時,其灰度值的周期性分布被破壞。圖15(d)顯示了SWT的結果,很明顯,未斷股導體圖像的Z形波形彼此具有幾乎相同的寬度,而對應于斷股鋁絞線部分的Z形波形具有局部的寬度突然增加或連續減小。在圖15(e)所示的每個軸上Z形波形寬度的統計分布中,這種現象更為明顯。圖15(f)顯示了相鄰異常Z形波的寬度疊加結果。整個導線上斷股鋁絞線的位置在圖15(f)中一目了然。Z形波形寬度疊加結果中的最大值告訴我們,斷股導線中有3根斷鋁絞線,這與實際情況相符。
3.1.2現場數據驗證
如表3所示,構建了1個包含400幅簡單背景下的現場圖像和400幅復雜背景下的圖像集,驗證了導線斷股檢測算法的有效性和魯棒性。結果表明,簡單條件下的檢測精度高于復雜條件下的檢測精度,平均檢測精度可達90.45%,能有效地檢測出輸電線路中的導線斷線。
3.2導體表面缺陷檢測算法性能測試
3.2.1算法驗證
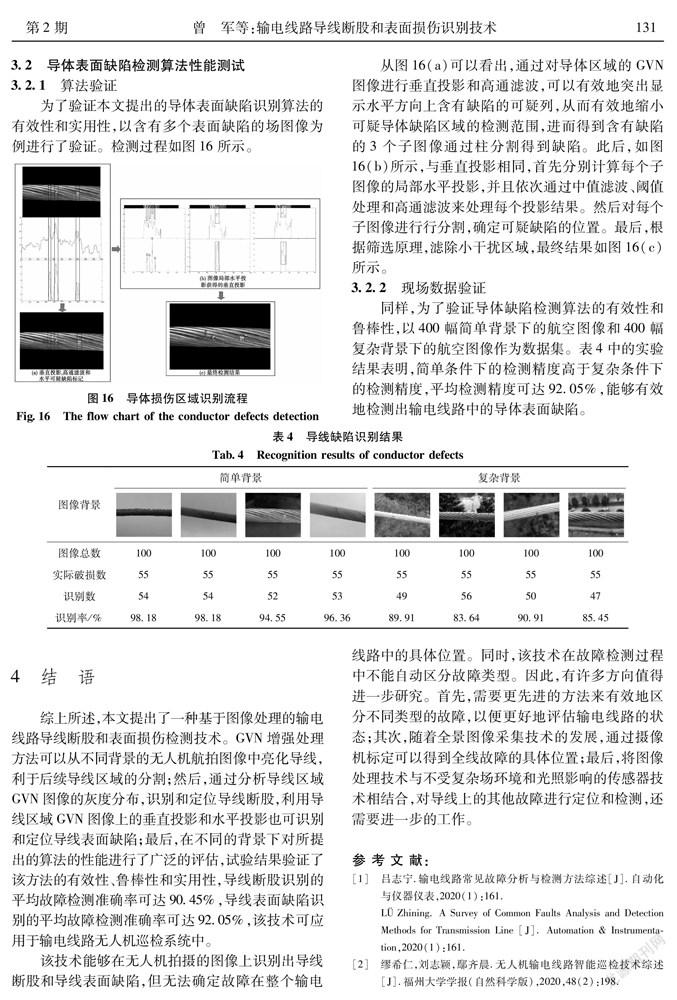
為了驗證本文提出的導體表面缺陷識別算法的有效性和實用性,以含有多個表面缺陷的場圖像為例進行了驗證。檢測過程如圖16所示。
從圖16(a)可以看出,通過對導體區域的GVN圖像進行垂直投影和高通濾波,可以有效地突出顯示水平方向上含有缺陷的可疑列,從而有效地縮小可疑導體缺陷區域的檢測范圍,進而得到含有缺陷的3個子圖像通過柱分割得到缺陷。此后,如圖16(b)所示,與垂直投影相同,首先分別計算每個子圖像的局部水平投影,并且依次通過中值濾波、閾值處理和高通濾波來處理每個投影結果。然后對每個子圖像進行行分割,確定可疑缺陷的位置。最后,根據篩選原理,濾除小干擾區域,最終結果如圖16(c)所示。
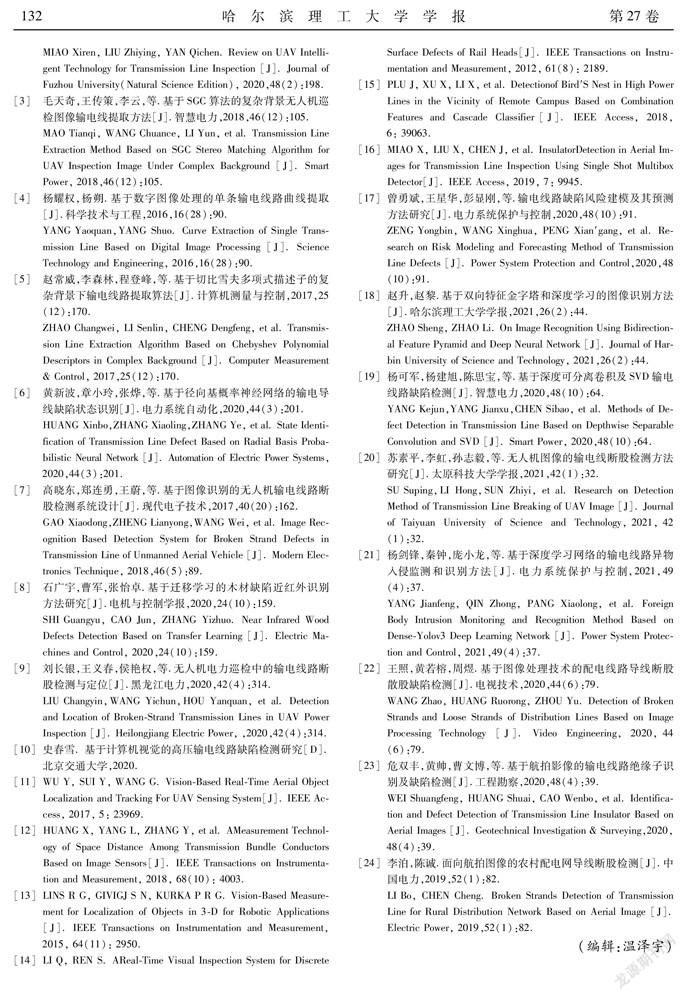
3.2.2現場數據驗證
同樣,為了驗證導體缺陷檢測算法的有效性和魯棒性,以400幅簡單背景下的航空圖像和400幅復雜背景下的航空圖像作為數據集。表4中的實驗結果表明,簡單條件下的檢測精度高于復雜條件下的檢測精度,平均檢測精度可達92.05%,能夠有效地檢測出輸電線路中的導體表面缺陷。
4結語
綜上所述,本文提出了一種基于圖像處理的輸電線路導線斷股和表面損傷檢測技術。GVN增強處理方法可以從不同背景的無人機航拍圖像中亮化導線,利于后續導線區域的分割;然后,通過分析導線區域GVN圖像的灰度分布,識別和定位導線斷股,利用導線區域GVN圖像上的垂直投影和水平投影也可識別和定位導線表面缺陷;最后,在不同的背景下對所提出的算法的性能進行了廣泛的評估,試驗結果驗證了該方法的有效性、魯棒性和實用性,導線斷股識別的平均故障檢測準確率可達90.45%,導線表面缺陷識別的平均故障檢測準確率可達92.05%,該技術可應用于輸電線路無人機巡檢系統中。
該技術能夠在無人機拍攝的圖像上識別出導線斷股和導線表面缺陷,但無法確定故障在整個輸電線路中的具體位置。同時,該技術在故障檢測過程中不能自動區分故障類型。因此,有許多方向值得進一步研究。首先,需要更先進的方法來有效地區分不同類型的故障,以便更好地評估輸電線路的狀態;其次,隨著全景圖像采集技術的發展,通過攝像機標定可以得到全線故障的具體位置;最后,將圖像處理技術與不受復雜場環境和光照影響的傳感器技術相結合,對導線上的其他故障進行定位和檢測,還需要進一步的工作。
參 考 文 獻:
[1]呂志寧.輸電線路常見故障分析與檢測方法綜述[J].自動化與儀器儀表,2020(1):161.Lü Zhining. A Survey of Common Faults Analysis and Detection Methods for Transmission Line [J]. Automation & Instrumentation,2020(1):161.
[2]繆希仁,劉志穎,鄢齊晨.無人機輸電線路智能巡檢技術綜述[J].福州大學學報(自然科學版),2020,48(2):198.MIAO Xiren, LIU Zhiying, YAN Qichen. Review on UAV Intelligent Technology for Transmission Line Inspection [J]. Journal of Fuzhou University(Natural Science Edition), 2020,48(2):198.
[3]毛天奇,王傳策,李云,等.基于SGC算法的復雜背景無人機巡檢圖像輸電線提取方法[J].智慧電力,2018,46(12):105.MAO Tianqi, WANG Chuance, LI Yun, et al. Transmission Line Extraction Method Based on SGC Stereo Matching Algorithm for UAV Inspection Image Under Complex Background [J]. Smart Power, 2018,46(12):105.
[4]楊耀權,楊朔.基于數字圖像處理的單條輸電線路曲線提取[J].科學技術與工程,2016,16(28):90.YANG Yaoquan,YANG Shuo. Curve Extraction of Single Transmission Line Based on Digital Image Processing [J]. Science Technology and Engineering, 2016,16(28):90.
[5]趙常威,李森林,程登峰,等.基于切比雪夫多項式描述子的復雜背景下輸電線路提取算法[J].計算機測量與控制,2017,25(12):170.ZHAO Changwei, LI Senlin, CHENG Dengfeng, et al. Transmission Line Extraction Algorithm Based on Chebyshev Polynomial Descriptors in Complex Background [J]. Computer Measurement & Control, 2017,25(12):170.
[6]黃新波,章小玲,張燁,等.基于徑向基概率神經網絡的輸電導線缺陷狀態識別[J].電力系統自動化,2020,44(3):201.HUANG Xinbo,ZHANG Xiaoling,ZHANG Ye, et al. State Identification of Transmission Line Defect Based on Radial Basis Probabilistic Neural Network [J]. Automation of Electric Power Systems,2020,44(3):201.
[7]高曉東,鄭連勇,王蔚,等.基于圖像識別的無人機輸電線路斷股檢測系統設計[J].現代電子技術,2017,40(20):162.GAO Xiaodong,ZHENG Lianyong,WANG Wei, et al. Image Recognition Based Detection System for Broken Strand Defects in Transmission Line of Unmanned Aerial Vehicle [J]. Modern Electronics Technique, 2018,46(5):89.
[8]石廣宇,曹軍,張怡卓.基于遷移學習的木材缺陷近紅外識別方法研究[J].電機與控制學報,2020,24(10):159.SHI Guangyu, CAO Jun, ZHANG Yizhuo. Near Infrared Wood Defects Detection Based on Transfer Learning [J]. Electric Machines and Control, 2020,24(10):159.
[9]劉長銀,王義春,侯艷權,等.無人機電力巡檢中的輸電線路斷股檢測與定位[J].黑龍江電力,2020,42(4):314.LIU Changyin,WANG Yichun,HOU Yanquan, et al. Detection and Location of Broken-Strand Transmission Lines in UAV Power Inspection [J]. Heilongjiang Electric Power, ,2020,42(4):314.
[10]史春雪. 基于計算機視覺的高壓輸電線路缺陷檢測研究[D].北京交通大學,2020.
[11]WU Y, SUI Y, WANG G. Vision-Based Real-Time Aerial Object Localization and Tracking For UAV Sensing System[J]. IEEE Access, 2017, 5: 23969.
[12]HUANG X, YANG L, ZHANG Y, et al. AMeasurement Technology of Space Distance Among Transmission Bundle Conductors Based on Image Sensors[J]. IEEE Transactions on Instrumentation and Measurement, 2018, 68(10): 4003.
[13]LINS R G, GIVIGJ S N, KURKA P R G. Vision-Based Measurement for Localization of Objects in 3-D for Robotic Applications[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(11): 2950.
[14]LI Q, REN S. AReal-Time Visual Inspection System for Discrete Surface Defects of Rail Heads[J]. IEEE Transactions on Instrumentation and Measurement, 2012, 61(8): 2189.
[15]PLU J, XU X, LI X, et al. Detectionof Bird′S Nest in High Power Lines in the Vicinity of Remote Campus Based on Combination Features and Cascade Classifier[J]. IEEE Access, 2018, 6: 39063.
[16]MIAO X, LIU X, CHEN J, et al. InsulatorDetection in Aerial Images for Transmission Line Inspection Using Single Shot Multibox Detector[J]. IEEE Access, 2019, 7: 9945.
[17]曾勇斌,王星華,彭顯剛,等.輸電線路缺陷風險建模及其預測方法研究[J].電力系統保護與控制,2020,48(10):91.ZENG Yongbin, WANG Xinghua, PENG Xian′gang, et al. Research on Risk Modeling and Forecasting Method of Transmission Line Defects [J]. Power System Protection and Control,2020,48(10):91.
[18]趙升,趙黎.基于雙向特征金字塔和深度學習的圖像識別方法[J].哈爾濱理工大學學報,2021,26(2):44.ZHAO Sheng, ZHAO Li. On Image Recognition Using Bidirectional Feature Pyramid and Deep Neural Network [J]. Journal of Harbin University of Science and Technology, 2021,26(2):44.
[19]楊可軍,楊建旭,陳思寶,等.基于深度可分離卷積及SVD輸電線路缺陷檢測[J].智慧電力,2020,48(10):64.YANG Kejun,YANG Jianxu,CHEN Sibao, et al. Methods of Defect Detection in Transmission Line Based on Depthwise Separable Convolution and SVD [J]. Smart Power, 2020,48(10):64.
[20]蘇素平,李虹,孫志毅,等.無人機圖像的輸電線斷股檢測方法研究[J].太原科技大學學報,2021,42(1):32.SU Suping,LI Hong,SUN Zhiyi, et al. Research on Detection Method of Transmission Line Breaking of UAV Image [J]. Journal of Taiyuan University of Science and Technology,2021,42(1):32.
[21]楊劍鋒,秦鐘,龐小龍,等.基于深度學習網絡的輸電線路異物入侵監測和識別方法[J].電力系統保護與控制,2021,49(4):37.YANG Jianfeng, QIN Zhong, PANG Xiaolong, et al. Foreign Body Intrusion Monitoring and Recognition Method Based on Dense-Yolov3 Deep Learning Network [J]. Power System Protection and Control, 2021,49(4):37.
[22]王照,黃若榕,周煜.基于圖像處理技術的配電線路導線斷股散股缺陷檢測[J].電視技術,2020,44(6):79.WANG Zhao, HUANG Ruorong, ZHOU Yu. Detection of Broken Strands and Loose Strands of Distribution Lines Based on Image Processing Technology [J]. Video Engineering, 2020,44(6):79.
[23]危雙豐,黃帥,曹文博,等.基于航拍影像的輸電線路絕緣子識別及缺陷檢測[J].工程勘察,2020,48(4):39.WEI Shuangfeng, HUANG Shuai, CAO Wenbo, et al. Identification and Defect Detection of Transmission Line Insulator Based on Aerial Images [J]. Geotechnical Investigation & Surveying,2020,48(4):39.
[24]李泊,陳誠.面向航拍圖像的農村配電網導線斷股檢測[J].中國電力,2019,52(1):82.LI Bo, CHEN Cheng. Broken Strands Detection of Transmission Line for Rural Distribution Network Based on Aerial Image [J]. Electric Power, 2019,52(1):82.
(編輯:溫澤宇)
猜你喜歡
科學與財富(2016年26期)2016-12-01 21:27:59
中國新技術新產品(2016年22期)2016-11-29 05:33:48
中國新技術新產品(2016年22期)2016-11-29 05:23:01
企業技術開發·中旬刊(2016年10期)2016-11-12 16:58:56
企業技術開發·中旬刊(2016年10期)2016-11-12 15:13:52
中國科技博覽(2016年22期)2016-11-01 18:19:47
中國科技博覽(2016年19期)2016-10-19 13:11:05
科學與財富(2016年28期)2016-10-14 20:23:24
科學與財富(2016年28期)2016-10-14 04:19:29
科學與財富(2016年28期)2016-10-14 03:48:23
