基于機(jī)器視覺的小貫小綠葉蟬智能識別的研究與應(yīng)用
2022-06-21 11:11:50邊磊何旭棟季慧華蔡曉明羅宗秀陳華才陳宗懋
茶葉科學(xué) 2022年3期
邊磊,何旭棟,季慧華,蔡曉明,羅宗秀,陳華才,陳宗懋*
基于機(jī)器視覺的小貫小綠葉蟬智能識別的研究與應(yīng)用
邊磊1,何旭棟2,3,季慧華2,蔡曉明1,羅宗秀1,陳華才3*,陳宗懋1*
1. 中國農(nóng)業(yè)科學(xué)院茶葉研究所,浙江 杭州 310008;2. 杭州益昊農(nóng)業(yè)科技有限公司,浙江 杭州 310018;3. 中國計量大學(xué),浙江 杭州 310018
深度學(xué)習(xí)已經(jīng)在農(nóng)作物害蟲實時監(jiān)測的智能識別過程中廣泛應(yīng)用。以小貫小綠葉蟬()識別模型為基礎(chǔ),研究深度學(xué)習(xí)在誘蟲板上葉蟬識別中的應(yīng)用,旨在提高小貫小綠葉蟬田間種群調(diào)查的準(zhǔn)確性。本研究設(shè)計了一種茶園小貫小綠葉蟬的識別、計數(shù)方法,首先采用黃色誘蟲板誘集小貫小綠葉蟬,利用相機(jī)對誘蟲板進(jìn)行圖像采集并上傳至服務(wù)器,然后通過服務(wù)器部署的目標(biāo)檢測算法,對圖像中葉蟬進(jìn)行識別與計數(shù)。通過算法篩選,確定YOLOv3作為識別算法,用改進(jìn)后的Soft-NMS代替原來的NMS,用K-means聚類方法計算新的先驗框的尺寸,提升YOLOv3對目標(biāo)識別的速度和準(zhǔn)確率。通過田間試驗對比誘蟲板上葉蟬的真實數(shù)量,結(jié)果顯示優(yōu)化后識別算法的準(zhǔn)確率可達(dá)到95.35%以上。本研究驗證了誘蟲板誘集、目標(biāo)識別算法和物聯(lián)網(wǎng)技術(shù)相結(jié)合,能夠為小貫小綠葉蟬田間種群的實時監(jiān)測提供技術(shù)支持,可為其他具有顏色偏愛性昆蟲的實時監(jiān)測和茶園害蟲綜合治理提供參考。
深度學(xué)習(xí);目標(biāo)檢測;小貫小綠葉蟬;種群監(jiān)測;YOLOv3
茶樹是我國重要的經(jīng)濟(jì)作物,有害生物綜合治理(IPM)是當(dāng)下茶園害蟲防治的要求,害蟲種群的實時監(jiān)測是IPM的基礎(chǔ),是各種防治技術(shù)精準(zhǔn)施用的依據(jù)[1-2]。長期以來,許多茶樹害蟲的種群監(jiān)測采用人工統(tǒng)計的方法[3],不僅消耗大量的時間和人力,而且統(tǒng)計結(jié)果會因調(diào)查人員的變動產(chǎn)生誤差。因此,消除人工誤差,降低勞力成本,實時高效地監(jiān)測茶園害蟲的種群動態(tài),對于茶園害蟲的精準(zhǔn)防治至關(guān)重要。目前,人工智能相關(guān)的自動檢測識別技術(shù)已在害蟲的識別和監(jiān)測中廣泛應(yīng)用,將深度學(xué)習(xí)的概念融入關(guān)聯(lián)的設(shè)備中,實現(xiàn)在沒有人為干預(yù)的情況下,高效準(zhǔn)確統(tǒng)計穩(wěn)定區(qū)域內(nèi)目標(biāo)昆蟲的數(shù)量[4]。
小貫小綠葉蟬是中國茶園的重大害蟲之一,對黃色具有偏愛性[5],所以統(tǒng)計黃色誘蟲板上的葉蟬蟲口是監(jiān)測茶園葉蟬種群的一種常見的方法[6]。由于誘蟲板上葉蟬的體表特征和其他具有黃色偏愛性的昆蟲具有差異性,所以結(jié)合人工智能的視覺自動檢測識別方法是可行的。計算機(jī)視覺是一種常見、有效、并且能快速鑒別昆蟲種類的方法,將深度卷積神經(jīng)網(wǎng)絡(luò)(CNN)用于昆蟲檢測和識別的體系在植物害蟲監(jiān)測任務(wù)中具備良好的前景[7]。例如對稻田中殺蟲燈內(nèi)稻飛虱(包括白背飛虱和褐飛虱)[8]和蔬菜大棚中誘蟲板上薊馬的自動識別和檢測,已體現(xiàn)出智能識別技術(shù)在昆蟲種群動態(tài)監(jiān)測的優(yōu)勢[9]。
本研究采用圖像深度學(xué)習(xí)篩選并優(yōu)化小貫小綠葉蟬的識別技術(shù),包括圖像的預(yù)處理、目標(biāo)檢測算法的選擇和優(yōu)化,以及識別模型的田間評估,以期為小貫小綠葉蟬的遠(yuǎn)程實時監(jiān)測提供技術(shù)支持。
1 材料與方法
1.1 圖像采集
1.1.1 圖像預(yù)處理
采用黃色誘蟲板(25?cm×20?cm,杭州益昊農(nóng)業(yè)科技有限公司)誘集茶園中的小貫小綠葉蟬。通過工業(yè)相機(jī)(1?200萬像素,杭州海康威視數(shù)字技術(shù)股份有限公司,參數(shù)見表1)對茶園的誘蟲板進(jìn)行實時拍照,采集圖像(圖1),對其中成像存在問題的圖片進(jìn)行預(yù)處理。

表1 工業(yè)相機(jī)參數(shù)
對于在強(qiáng)光下圖片存在過度曝光的問題(圖1-c,圖2-a),采用直方圖變換的方法預(yù)處理[10]。先通過灰度值分布求出概率密度函數(shù),再根據(jù)公式將原有圖像的灰度值做映射處理,最后用新的灰度值代替原位置像素的灰度值,將灰度值范圍進(jìn)行拉伸,起到增強(qiáng)對比度的作用(圖2-b)。
1.1.2 小目標(biāo)檢測
小目標(biāo)檢測在深度學(xué)習(xí)目標(biāo)檢測領(lǐng)域一直屬于難題[11]。小貫小綠葉蟬檢測屬于小目標(biāo)檢測,其主要難點在于兩點:(1)大多數(shù)的樣本不包含小目標(biāo);(2)即使在包含小目標(biāo)的樣本中,小目標(biāo)的出現(xiàn)次數(shù)也極其有限。在本研究所有圖像中,小貫小綠葉蟬的大小在(20×20)~(70×70)范圍內(nèi),整幅圖像大小為4?000×3?000,所占的面積極少,同時每幅圖的樣本數(shù)量也不足,導(dǎo)致目標(biāo)檢測算法很難學(xué)習(xí)到小貫小綠葉蟬的相關(guān)特征。

注:a、b、c、d分別為采集自雨天、晴天、強(qiáng)光和弱光條件下的圖片

注:(a)過度曝光原圖,(b)直方圖變化處理后
1.1.3 數(shù)據(jù)增強(qiáng)
鑒于采集圖像的數(shù)量有限,需通過數(shù)據(jù)增強(qiáng)的方法來提升深度學(xué)習(xí)訓(xùn)練效果[12]。訓(xùn)練之前不僅對圖像進(jìn)行了常規(guī)的垂直水平翻轉(zhuǎn)和任意角度的旋轉(zhuǎn),同時為了解決小目標(biāo)樣本不足的問題,采用特殊的Copy-Paste技術(shù)。對整張圖片進(jìn)行操作之后分別得到含目標(biāo)的前景區(qū)域和不含目標(biāo)的背景區(qū)域,然后把前景疊加在背景圖上,將得到的新圖加到訓(xùn)練集中進(jìn)行訓(xùn)練。

圖3 采用Copy-Paste技術(shù)進(jìn)行圖像數(shù)據(jù)增強(qiáng)
本研究為了得到Copy-Paste的最佳效果,嘗試了多種不同的方法。第一種嘗試是把不同小貫小綠葉蟬目標(biāo)復(fù)制,并融合到一張圖中;第二種方式是把同一小貫小綠葉蟬目標(biāo)復(fù)制多次,融合到一張圖中,效果如圖3所示。結(jié)果表明,這兩種方法使算法的性能得到了提升。試驗中深度學(xué)習(xí)訓(xùn)練的圖片數(shù)量為2?000張,其中1?800張用于模型學(xué)習(xí),200張用于測試。
1.2 算法選擇
1.2.1 Faster R-CNN
Faster R-CNN由Ross Girshick在2015年推出[13],為了提高檢測速度與精度,F(xiàn)aster R-CNN將R-CNN和RPN(Region proposal network)進(jìn)行了結(jié)合[14]。Faster R-CNN的核心是提出了RPN,代替了傳統(tǒng)產(chǎn)生候選區(qū)域的方法,實現(xiàn)了端到端的訓(xùn)練。在結(jié)構(gòu)上,F(xiàn)aster R-CNN已經(jīng)將特征抽取(Feature extraction)、proposal提取、bounding box regression(Rect refine)、classification整合在了一個網(wǎng)絡(luò)中,使得綜合性能有較大提高,在檢測速度方面尤為明顯。采用ROI Pooling(Region of interest pooling)使用最大值池化將特征圖上ROI(Region of interest pooling)固定為特定大小的特征圖,采用NMS(Non-maximum suppression,非極大值抑制)技術(shù),篩選候選框數(shù)量。
1.2.2 SSD
SSD(Single shot multibox detector)于2016年提出,是經(jīng)典的one-stage目標(biāo)檢測模型之一[15]。SSD消除了邊界框候選以及特征的上采樣過程,精度上和Faster R-CNN目標(biāo)檢測方法相同,在速度上也能滿足實時性的要求。SSD提取了不同尺度的特征圖進(jìn)行檢測,大尺度特征圖(較靠前的特征圖)可以用來檢測小物體,而小尺度特征圖(較靠后的特征圖)用來檢測大物體;并且采用不同尺度和長寬比的先驗框。SSD借鑒了Faster R-CNN中錨的理念,每個單元設(shè)置尺度或者長寬比不同的先驗框,預(yù)測的邊界框(Bounding boxes)以先驗框為基準(zhǔn),減少了訓(xùn)練難度。但是SSD也存在一些不足,如小目標(biāo)的檢測效果不好,定位不準(zhǔn)等。
1.2.3 YOLOv3
YOLOv3是YOLO(You only look once)系列目標(biāo)檢測算法中的第3版,由Redmon等[16]提出,是以Darknet53作為Backbone的一個全卷積神經(jīng)網(wǎng)絡(luò)。相比之前YOLO系列的算法,針對小目標(biāo)的精度有顯著提升[16]。主要體現(xiàn)在ResNet的應(yīng)用和多尺度檢測。
為了提高對小目標(biāo)的檢測能力,YOLOv3采用了類似FPN(Feature pyramid networks)的多尺度特征融合算法[16],具體如圖4所示,卷積網(wǎng)絡(luò)在經(jīng)歷幾個卷積層之后在79層得到一種尺度的檢測結(jié)果,相較于輸入圖像,這里的特征圖進(jìn)行了32倍的下采樣。由于采用了較高的下采樣倍數(shù),特征圖擁有較大的感受野,對尺寸較大的對象具有較好的檢測效果。為了實現(xiàn)對小目標(biāo)的檢測,本研究將第79層特征圖作上采樣并與第61層特征圖融合,進(jìn)行一系列卷積操作得到第91層特征圖,在提高網(wǎng)絡(luò)泛化能力同時提高網(wǎng)絡(luò)精度以及算法的速度。經(jīng)過該次上采樣,可以得到相對于原圖像進(jìn)行了16倍下采樣的特征圖,由于其具有中等尺寸的感受野,對中等尺寸目標(biāo)的檢測效果較優(yōu)。然后進(jìn)行相似操作,將第91層特征圖進(jìn)行第二次上采樣,與第36層特征圖融合,得到的特征圖相對于輸入圖像進(jìn)行了8倍下采樣。最后的特征圖具有最小的感受野,適合檢測小目標(biāo)對象。
1.3 YOLOv3算法優(yōu)化
以YOLOv3作為識別算法并進(jìn)行改進(jìn),主要體現(xiàn)在用改進(jìn)后的Soft-NMS代替原來YOLOv3中的NMS和用K-means聚類方法重新計算先驗框的尺寸兩個方面。
1.3.1 NMS的改進(jìn)
對于大多數(shù)目標(biāo)檢測算法,NMS是必要的后處理步驟,該處理方法容易造成目標(biāo)漏檢,一旦兩個對象的重疊區(qū)域太大,則重疊的對象框可能會被過濾掉[17]。NMS根據(jù)檢測框的概率進(jìn)行降序排序之后,以概率最大的檢測框作為基準(zhǔn),依次計算其他檢測框與其IOU(Intersection-over-union,交并比),隨后去除掉IOU值大于閾值的檢測框,導(dǎo)致目標(biāo)檢測算法漏檢。

圖4 多尺度特征融合示意圖
如圖5所示,在YOLOv3檢測小貫小綠葉蟬的實際應(yīng)用中,紅框和藍(lán)框分別為不同的目標(biāo),但紅框的得分低于藍(lán)框,并且兩框之間的IOU超過了設(shè)定的閾值,根據(jù)NMS的處理步驟,紅框會被過濾掉,造成漏檢。為了避免此類情況的發(fā)生,本研究使用改進(jìn)的Soft-NMS進(jìn)行目標(biāo)框的去重處理。

圖5 目標(biāo)漏檢
Soft-NMS算法由Bodla等[18]提出用來優(yōu)化NMS算法,通常用于解決檢測框之間IOU較高的問題。其優(yōu)勢是能夠把現(xiàn)有的概率遞歸地進(jìn)行修改,不會直接過濾掉IOU較高的檢測框,在同一類目標(biāo)之間IOU較高時可以避免對檢測框?qū)嵤┱`過濾操作。
Soft-NMS的工作原理是重疊度大于閾值的其他檢測框不會直接去除,而是采用一個函數(shù)來衰減這些檢測框的置信度。對于重疊度很高的檢測框,置信度會衰減為一個很低的分?jǐn)?shù);相反,對于重疊度很低的驗證框,保留原來的置信度。
Soft-NMS的抑制表達(dá)式的形式有兩種,一種是線性加權(quán):

一種是高斯加權(quán):
在高斯衰減函數(shù)中,N是指IOU的閾值,在Soft-NMS高斯衰減求最優(yōu)解的試驗中,當(dāng)=0.6時,效果最佳。試驗過程中,發(fā)現(xiàn)當(dāng)兩個檢測框的IOU值較大時,Soft-NMS算法仍然會使檢驗框的置信度得分低于更新后先前設(shè)置的閾值,從而導(dǎo)致漏檢。基于Soft-NMS的最佳結(jié)果,提出了新的衰減公式來減小原始衰減幅度:

改進(jìn)之后的Soft-NMS表達(dá)式為:
其中,是指可修改并用于控制衰減幅度的參數(shù)。在N取0.5,取0.6的Soft-NMS最優(yōu)條件下,以作為自變量,研究與模型效果的關(guān)系,結(jié)果如圖6所示。在本研究中,當(dāng)達(dá)到0.05時效果最佳。
1.3.2 K-means聚類方法
目前的目標(biāo)檢測算法大多采用錨定機(jī)制,即先定義許多先驗框作為初始值,再在此基礎(chǔ)上進(jìn)行優(yōu)化得到最終結(jié)果。錨定機(jī)制將所有可能的實例框的連續(xù)空間離散化為一些預(yù)定義尺寸及寬高比的有限數(shù)量的框,縮小了網(wǎng)絡(luò)的參數(shù)分布空間,提高了算法定位的準(zhǔn)確性[19]。傳統(tǒng)獲取錨點的方法是基于最后一個特征圖,例如,最后一層的特征圖大小為13×13,相對尺寸在(0×0,13×13)范圍內(nèi)。經(jīng)典算法是使用K-means聚類獲得不同大小的錨點,這些錨點被分為多尺度特征圖。在YOLOv3中,用于訓(xùn)練的數(shù)據(jù)集為COCO數(shù)據(jù)集,根據(jù)K-means聚類的方法為每種下采樣尺度設(shè)定3種先驗框,總共聚類出9種尺寸的先驗框。在COCO數(shù)據(jù)集這9個先驗框分別是(10×13)、(16×30)、(33×23)、(30×61)、(62×45)、(59×119)、(116×90)、(156×198)、(373×326)。在本試驗中所使用的數(shù)據(jù)集與COCO數(shù)據(jù)集差異較大,使用原始錨設(shè)置不合適,需要重新計算小貫小綠葉蟬數(shù)據(jù)集的錨定尺寸,通過K-means均值聚類獲得的結(jié)果如表2所示。同樣,9個錨分為3個比例。
分配上,在最小的13×13特征圖上有較大的感受野,應(yīng)用較大的先驗框(59×36)、(67×43)、(72×47)適合檢測較大的對象。中等的26×26特征圖上有中等的感受野,應(yīng)用中等的先驗框(44×25)、(49×27)、(51×31)適合檢測中等大小的對象。較大的52×52特征圖上有較小的感受野,應(yīng)用較小的先驗框(22×11)、(33×18)、(40×22)適合檢測較小的對象。

表2 尺寸分類表

圖6 Soft-NMS公式k值與模型效果關(guān)系圖
如圖7所示,利用原有的先驗框進(jìn)行目標(biāo)檢測,存在先驗框尺寸過大和定位不準(zhǔn)的問題(圖7-a)。利用K-means均值聚類重新計算先驗框尺寸后,先驗框更加貼合目標(biāo),位置也更加準(zhǔn)確(圖7-b)。
1.4 模型效果評估
1.4.1 模型運行環(huán)境
計算機(jī)配置CPU型號為Intel(R)Core(TM)i7-7500HQ,CPU3.2?GHz,內(nèi)存16?G,GPU型號為NVIDIA GTX 3060Ti,1?T固態(tài)硬盤。計算機(jī)操作系統(tǒng)為Window10 64位操作系統(tǒng),配置python3.6,PyCharm2019.6,tensorflow-gpu-1.14.0+cudnn-7.6.4+cuda-10.0+Pytorch-2.2.4深度學(xué)習(xí)框架用于所有模型的訓(xùn)練和測試。參數(shù)設(shè)置:Batch size設(shè)置為16,img size為416,epochs為100,GPU num為1,learning rate為0.001,并在4?000和4?500迭代中除以10,optimizer為SGD。
1.4.2 田間測試
在模型深度學(xué)習(xí)的基礎(chǔ)上,對其識別準(zhǔn)確率開展田間測試評估,地點位于中國農(nóng)業(yè)科學(xué)院茶葉研究所種質(zhì)資源圃。分別于2020年6月和2021年6月,在測試地點架設(shè)葉蟬田間圖像采集設(shè)備(圖8),每天中午懸掛誘蟲板,24?h后進(jìn)行更換,圖像采集時間為早晨7:00,每次采集1張誘蟲板圖像,連續(xù)采集15?d,以誘蟲板上葉蟬的實際誘捕數(shù)量作為真實值,通過對比設(shè)備的識別數(shù)量來評估設(shè)備的精確性。目標(biāo)檢測常用的評價標(biāo)準(zhǔn)有查準(zhǔn)率(Precision)、查全率(Recall)、平均準(zhǔn)確率(Average precision),在本研究中用查準(zhǔn)率作為評判不同算法識別準(zhǔn)確率的標(biāo)準(zhǔn)。查準(zhǔn)率的公式為:

圖7 K-means均值聚類效果對比

圖8 葉蟬田間圖像采集設(shè)備及其系統(tǒng)結(jié)構(gòu)示意圖
=/(+)
式中,表示當(dāng)目標(biāo)被正確識別出來,即正樣本被識別成正樣本(真實值),表示非目標(biāo)被識別成目標(biāo),即負(fù)樣本被識別成正樣本(錯誤識別)。
2 結(jié)果與分析
2.1 不同模型識別小貫小綠葉蟬的效果
為了驗證算法優(yōu)化后的效果,對比SSD、Faster R-CNN、原始YOLOv3和優(yōu)化后YOLOv3算法的值。小貫小綠葉蟬的數(shù)據(jù)被分別輸入到4種算法中,以相同的設(shè)置進(jìn)行訓(xùn)練和測試。結(jié)果如圖9所示,對比SSD、Faster R-CNN和YOLOv3算法,F(xiàn)aster-RCNN算法在準(zhǔn)確率值和運算速度方面都不是很理想,SSD算法的速度比YOLOv3算法快,但值較低。改進(jìn)后的YOLOv3算法相較于改進(jìn)前準(zhǔn)確率提高了7.7%,達(dá)到95.3%,同時運算速度也有所提升(0.5%)。
2.2 基于改進(jìn)YOLOv3的小貫小綠葉蟬識別
以基準(zhǔn)線作為對照,對比了不同策略對算法的提升效果。結(jié)果顯示,不同的策略對YOLOv3算法的值均有提升(圖10)。其中采用Copy-Paste策略后,值比原始YOLOv3算法中的正常數(shù)據(jù)增加3.6%,主要是因為Copy-Paste策略在增加小目標(biāo)樣本數(shù)量尺寸的同時,增加了小目標(biāo)樣本數(shù)量,保證每個圖像中同時有多個小目標(biāo)。根據(jù)小貫小綠葉蟬數(shù)據(jù)的特征設(shè)計錨點,可以使網(wǎng)絡(luò)更加準(zhǔn)確地了解小貫小綠葉蟬的邊緣信息,因此K-means聚類策略使值提升了1.8%的。在實際場景中,小貫小綠葉蟬的重疊非常普遍,由于原始NMS無法用于檢測重疊的對象,會導(dǎo)致值下降,針對此問題Soft-NMS與改進(jìn)后的Soft-NMS可以對算法值分別提升0.5%和1.6%。
2.3 模型田間測試
如表4所示,2020年田間測試試驗中,15?d中有6次系統(tǒng)識別的葉蟬數(shù)量與實際數(shù)量一致,整個測試期內(nèi),小貫小綠葉蟬總體識別準(zhǔn)確率為93.86%。2021年,在持續(xù)學(xué)習(xí)采集樣本的基礎(chǔ)上,15?d中有7次系統(tǒng)識別的葉蟬數(shù)量與實際數(shù)量一致,小貫小綠葉蟬總體識別準(zhǔn)確率為95.35%。
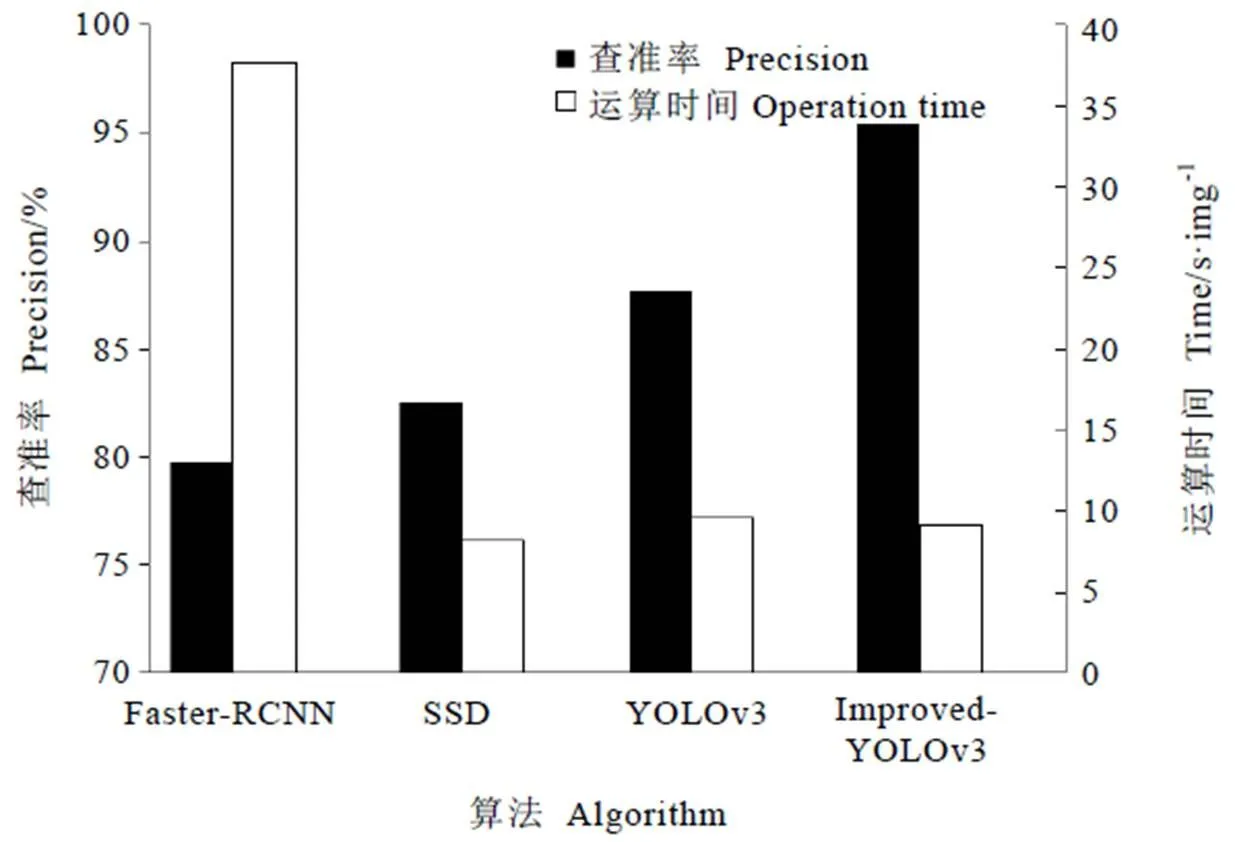
圖9 不同算法的查準(zhǔn)率和速度比較

圖10 不同的策略對YOLOv3算法平均準(zhǔn)確率的影響

表4 模型對葉蟬的識別準(zhǔn)確率
3 討論
采用深度學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)的目標(biāo)檢測算法識別誘蟲板上的小貫小綠葉蟬,在田間試驗中結(jié)合物聯(lián)網(wǎng)、圖像采集系統(tǒng)初試的識別準(zhǔn)確率可達(dá)到93.86%以上,說明依托機(jī)器視覺的葉蟬智能識別在茶園中用于葉蟬成蟲的監(jiān)測是可行的。本研究雖然在前期圖像的采集過程中考慮到了數(shù)據(jù)的多樣性,并且在算法迭代過程中加入了負(fù)樣本的學(xué)習(xí),但是在開放環(huán)境下目標(biāo)害蟲體征的實時變化,使得樣本的多樣性和復(fù)雜性遠(yuǎn)遠(yuǎn)超出預(yù)期。如環(huán)境中的光強(qiáng)度會直接影響誘蟲板圖像的亮度;濕度過高和雨天會造成誘蟲板上凝聚水滴,導(dǎo)致系統(tǒng)誤判;葉蟬和部分昆蟲因誘蟲板懸掛時間過長而導(dǎo)致褪色和堆疊等問題,盡管已經(jīng)將這些情況作為負(fù)樣本對算法進(jìn)行優(yōu)化,但是受限于樣本采集的數(shù)量有限,在實際應(yīng)用中仍會產(chǎn)生誤判。
在研究中,通過調(diào)整圖像采集時間、誘蟲板懸掛時長可減少光照等環(huán)境因素對算法準(zhǔn)確率的影響。誘蟲板對小貫小綠葉蟬的誘集高峰是每天的清晨和傍晚[20],每天清晨采集誘蟲板上葉蟬的誘集量,能避免強(qiáng)光對圖像采集的影響,并反映出區(qū)域內(nèi)葉蟬的相對蟲口數(shù)量[21-23]。在田間試驗中通過每天更換誘蟲板縮短懸掛時長,可以避免葉蟬和部分昆蟲因誘蟲板懸掛時間過長而導(dǎo)致的褪色、白化和堆疊等問題,提升系統(tǒng)對葉蟬的識別率,但是該措施需要定期更換誘蟲板,會增加葉蟬動態(tài)監(jiān)測的工作量。受環(huán)境中濕度和氣候的影響,誘蟲板上的水滴問題不可避免,需通過采集大量的圖像進(jìn)行持續(xù)學(xué)習(xí)和算法優(yōu)化來解決。
茶園中具有顏色偏愛性的害蟲種類繁多,如薊馬、粉虱、葉甲、蠟蟬和網(wǎng)蝽等[24],結(jié)合誘蟲板誘集和智能識別技術(shù),可以實現(xiàn)對這些害蟲種群的遠(yuǎn)程監(jiān)測。植保裝備的智能化是我國未來農(nóng)業(yè)的發(fā)展方向,作物蟲害的準(zhǔn)確監(jiān)測是指導(dǎo)精準(zhǔn)用藥的前提[25-26]。本監(jiān)測系統(tǒng)在持續(xù)學(xué)習(xí)的基礎(chǔ)上,結(jié)合規(guī)范的使用方法,可進(jìn)一步提升對葉蟬的識別率,作為田間環(huán)境下葉蟬蟲口遠(yuǎn)程監(jiān)測的技術(shù)儲備,能夠為其他害蟲的智能識別、監(jiān)測技術(shù)研發(fā)提供指導(dǎo)。
[1] Kogan M. Integrated pest management: historical perspectives and contemporary developments [J]. Annual Review of Entomology, 1998, 43(1): 243-270.
[2] 吳孔明, 陸宴輝, 王振營. 我國農(nóng)業(yè)害蟲綜合防治研究現(xiàn)狀與展望[J]. 昆蟲知識, 2009, 46(6): 831-836.
Wu K M, Lu Y H, Wang Z Y. Advance in integrated pest management of crops in China [J]. Chinese Bulletin of Entomology, 2009, 46(6): 831-836.
[3] 中國茶葉學(xué)會標(biāo)準(zhǔn)化工作委員會. 茶樹主要害蟲綠色防控技術(shù)規(guī)程: T/CTSS 37—2021 [S/OL]. [2021-12-20]. http://down.foodmate.net/standard/yulan.php?itemid=115353.
Standardization Committee of China Tea Science Society. Green controlling technical regulations for major pests of tea plant: T/CTSS 37—2021 [S/OL]. [2021-12-20]. http://down.foodmate.net/standard/yulan.php?itemid=115353.
[4] Khanna A, Kaur S. Evolution of internet of things (IoT) and its significant impact in the field of precision agriculture [J]. Computers and Electronics in Agriculture, 2019, 157: 218-231.
[5] Bian L, Sun X L, Luo Z X, et al. Design and selection of trap color for capture of the tea leafhopper,, by orthogonal optimization [J]. Entomologia Experimentalis et Applicata, 2014, 151(3): 247-258.
[6] Bian L, Cai X M, Luo Z X, et al. Design of an attractant for(Hemiptera: Cicadellidae) based on the volatile components of fresh tea leaves [J]. Journal of Economic Entomology, 2018, 111(2): 629-636.
[7] 封洪強(qiáng), 姚青. 農(nóng)業(yè)害蟲自動識別與監(jiān)測技術(shù)[J]. 植物保護(hù), 2018, 44(5): 127-133.
Feng H Q, Yao Q. Automatic identification and monitoring technology of agricultural pests [J]. Plant Protection, 2018, 44(5): 127-133.
[8] 姚青, 吳叔珍, 蒯乃陽, 等. 基于改進(jìn)CornerNet的水稻燈誘飛虱自動檢測方法構(gòu)建與驗證[J]. 農(nóng)業(yè)工程學(xué)報, 2021, 37(7): 183-189.
Yao Q, Wu S Z, Kuai N Y, et al. Automatic detection of rice planthoppers through light-trap insect images using improved Corner Net [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(7): 183-189.
[9] 王茂林, 榮二花, 張利軍, 等. 基于圖像處理的薊馬計數(shù)方法研究[J]. 山西農(nóng)業(yè)科學(xué), 2020, 48(5): 812-816.
Wang M L, Rong E H, Zhang L J, et al, Study on countingbased on image processing [J]. Journal of Shanxi Agricultural Sciences, 2020, 48(5): 812-816.
[10] 李正飛. 基于小波變換的圖像增強(qiáng)技術(shù)研究[J]. 機(jī)械工程與自動化, 2009(2): 15-17.
Li Z F. Image enhancement method based on wavelet transform [J]. Mechanical Engineering & Automation, 2009(2): 15-17.
[11] 張江勇. 基于深度學(xué)習(xí)的動車關(guān)鍵部位故障圖像檢測[D]. 成都: 電子科技大學(xué), 2019.
Zhang J Y. Fault detection of emus based on deep learning [D]. Chengdu: University of Electronic Science and Technology of China, 2019.
[12] 彭宜. 基于殘差網(wǎng)絡(luò)和隨機(jī)森林的音頻識別方法研究[D]. 武漢: 武漢科技大學(xué), 2019.
Peng Y. Research on audio recognition method based on residual network and random forest [D]. Wuhan: Wuhan University of Science and Technology, 2019.
[13] Girshick R. Fast R-CNN [C]//IEEE. 2015 IEEE International Conference on Computer Vision (ICCV). Santiago: 2015.
[14] Ren S Q, He K M, Girshick R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149.
[15] Liu W, Anguelov D, Erhan D, et al. SSD: single shot multibox detector [M]//Leibe B, Matas J, Sebe N, et al. Lecture notes in computer science. Cham: Springer, 2016: 21-37.
[16] Redmon J, Farhadi A. YOLOv3: an incremental improvement [J]. Eprint ArXiv, 2018: 1804.02767. doi: 10.48550/arXiv.1804.02767.
[17] Huang J, Zhang H, Wang L, et al. Improved YOLOv3 Model for miniature camera detection [J]. Optics and Laser Technology, 2021, 142. doi: 10.1016/j.optlastec.2021.107133.
[18] Bodla N, Singh B, Chellappa R, et al. Soft-NMS-improving object detection with one line of code [J]. Eprint ArXiv, 2017: 1704.04503. doi: 10.48550/arXiv.1704.04503.
[19] Redmon J, Farhadi A. YOLO9000: better, faster, stronger [C]//IEEE. 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu: 2017.
[20] 邊磊, 孫曉玲, 陳宗懋. 假眼小綠葉蟬的日飛行活動性及成蟲飛行能力的研究[J]. 茶葉科學(xué), 2014, 34(3): 248-252.
Bian L, Sun X L, Chen Z M. Studies on daily flight activity and adult flight capacity ofG?the [J]. Journal of Tea Science, 2014, 34(3): 248-252.
[21] Kim K N, Huang Q Y, Lei C L. Advances in insect phototaxis and application to pest management: a review [J]. Pest Management Science, 2019, 75(12): 3135-3143.
[22] Shimoda M, Honda K. Insect reactions to light and its applications to pest management [J]. Applied Entomology and Zoology, 2013, 48(4): 413-421.
[23] Rodriguez-Saona C R, Byers J A, Schiffhauer D. Effect of trap color and height on captures of blunt-nosed and sharp-nosed leafhoppers (Hemiptera: Cicadellidae) and non-target arthropods in cranberry bogs [J]. Crop Protection, 2012, 40: 132-144.
[24] 楊智輝. 黃色誘蟲板對茶果園主要害益蟲的誘殺作用調(diào)查[J]. 現(xiàn)代農(nóng)業(yè)科技, 2017(15): 91-93.
Yang Z H. Investigation on the trapping and killing effect of yellow insect traps on the main harmful and beneficial insects in tea orchards [J]. Modern Agricultural Science and Technology, 2017(15): 91-93.
[25] 吳孔明. 中國農(nóng)作物病蟲害防控科技的發(fā)展方向[J]. 農(nóng)學(xué)學(xué)報, 2018, 8(1): 35-38.
Wu K M. Development direction of crop pest control science and technology in China [J]. Journal of Agriculture, 2018, 8(1): 35-38.
[26] 陳宗懋, 蔡曉明, 周利, 等. 中國茶園有害生物防控40年[J]. 中國茶葉, 2020, 42(1): 1-8.
Chen Z M, Cai X M, Zhou L, et al. Developments on tea plant pest control in past 40 years in China [J]. China Tea, 2020, 42(1): 1-8.
Research and Application of Intelligent Identification ofBased on Machine Vision
BIAN Lei1, HE Xudong2,3, JI Huihua2, CAI Xiaoming1, LUO Zongxiu1, CHEN Huacai3*, CHEN Zongmao1*
1. Tea Research Institute, Chinese Academy of Agricultural Sciences, Hangzhou 310008, China;2. Hangzhou Yihao Agricultural Technology Co., Ltd., Hangzhou 310018, China; 3. China Jiliang University, Hangzhou 310018, China
Deep learning has been widely used in intelligent identification in the progress of real-time monitoring of crop pests. Based on the identification model of tea leafhopper,, the application of deep learning in field leafhopper recognition was introduced to improve the precision of field population investigation ofIn this paper, a method of identification and count ofin tea garden was designed. Firstly, yellow sticky card was used to attract tea leafhoppers, and images of cards were collected by camera and uploaded to the web server. Then, target detection algorithm deployed by the server was used to identify and count the leafhoppers in the images. Through algorithm screening, YOLOv3 was determined as the recognition algorithm, and the improved soft-NMS was used to replace the original NMS. K-means clustering method was used to calculate the size of the new prior frame, so as to improve the speed and precision of YOLOv3. The results show that the average precision of the optimized algorithm could reach more than 95.35% comparing with the real number of leafhoppers on the sticky card. Therefore, the combination of the sticky card trapping, target recognition algorithm and internet of things technology could realize the real-time monitoring of population for, which could provide a reference for other insects with color preference and integrated pest management in tea gardens.
deep learning, target detection,, population monitoring, YOLOv3
S435.711;Q126
A
1000-369X(2022)03-376-11
2021-10-09
2021-12-01
浙江重點研發(fā)計劃(2019C02033)、財政部和農(nóng)業(yè)農(nóng)村部:國家現(xiàn)代農(nóng)業(yè)產(chǎn)業(yè)技術(shù)體系(CARS-19)、中國農(nóng)業(yè)科學(xué)院創(chuàng)新工程
邊磊,男,副研究員,主要從事茶樹害蟲物理防治技術(shù)研究。*通信作者:huacaichen@cjlu.edu.cn;zmchen2006@163.com
(責(zé)任編輯:黃晨)
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
