梯形波電流注入法的IPMSM多參數(shù)在線辨識
2022-06-23 07:12:56楊公德王朋劉寶謹(jǐn)
電機(jī)與控制學(xué)報 2022年5期
楊公德, 王朋, 劉寶謹(jǐn)
(1.福州大學(xué) 電氣工程及其自動化學(xué)院,福建 福州 350108; 2.謝菲爾德大學(xué) 電子電氣工程學(xué)院,謝菲爾德 S10 2TN)
0 引 言
內(nèi)嵌式永磁同步電動機(jī)(inner permanent magnet synchronous motors,IPMSM)具有結(jié)構(gòu)簡單、功率密度大和運(yùn)行效率高等優(yōu)點(diǎn),廣泛應(yīng)用于伺服系統(tǒng)、電動汽車及電動船舶等領(lǐng)域[1]。但受到溫度和磁路飽和影響,IPMSM的定子電阻、直軸電感、交軸電感和轉(zhuǎn)子永磁磁鏈將發(fā)生變化。這些電氣參數(shù)變化將嚴(yán)重影響IPMSM的無位置傳感器控制、解耦控制及自適應(yīng)控制的控制性能,甚至危及控制系統(tǒng)穩(wěn)定性[2-4]。因此,獲得精確的電氣參數(shù)是實(shí)現(xiàn)IPMSM高性能控制的關(guān)鍵。
目前,IPMSM電氣參數(shù)獲取方式包括離線參數(shù)辨識和在線參數(shù)辨識兩類。由于離線參數(shù)辨識只能辨識電動機(jī)在非運(yùn)行狀態(tài)下的電氣參數(shù),無法滿足電動機(jī)的高性能運(yùn)行要求,其應(yīng)用場合受到限制。在線參數(shù)辨識可實(shí)時辨識電動機(jī)電氣參數(shù),受到越來越多研究者的關(guān)注。根據(jù)IPMSM在同步旋轉(zhuǎn)坐標(biāo)系下的電壓方程可知,電動機(jī)有定子電阻,轉(zhuǎn)子永磁磁鏈,直軸電感和交軸電感共4個電氣參數(shù),但僅有兩個約束條件。因此,IPMSM的電壓方程是一個秩為2的方程。根據(jù)系統(tǒng)辨識理論,待辨識參數(shù)多于模型秩數(shù)將造成方程欠秩[5-6],無法保證辨識參數(shù)收斂到實(shí)際值。因此,僅依據(jù)辨識模型的一組輸入輸出量,無法保證辨識結(jié)果收斂于模型參數(shù)實(shí)際值。MOREAU S使用欠秩模型進(jìn)行電動機(jī)參數(shù)的在線辨識,定子電阻額定值為7.5 Ω,辨識值為6.30 Ω,定子電阻的辨識值和額定值間的誤差較大[7]。在假定轉(zhuǎn)子永磁磁鏈已知條件下,LIU L等人采用李雅普諾夫穩(wěn)定性算法在線辨識定子電阻和電感[8]。辨識過程忽略了IPMSM運(yùn)行過程中直軸電感、交軸電感和轉(zhuǎn)子永磁磁鏈變化對定子電阻辨識精度的影響。對于大功率IPMSM,由于受到功率密度及效率的限制,定子電阻一般較小,在中高速范圍內(nèi),定子電阻壓降在整個電壓方程中的權(quán)重較小。此外,定子電壓也受電壓和電流空間諧波影響。這些因素均對基于IPMSM動態(tài)電壓方程的定子電阻辨識精度產(chǎn)生較大影響。為此,研究者通過增加約束條件來增加IPMSM辨識模型的秩以提高在線參數(shù)辨識精度。浙江大學(xué)黃進(jìn)等人利用諧波反電勢增加一個一個辨識方程,無需注入擾動信號,便可多辨識一個參數(shù)[9]。IPMSM的電磁轉(zhuǎn)矩方程包含了電機(jī)的交直軸電感和轉(zhuǎn)子永磁磁鏈參數(shù),SENJYU T等人在IPMSM轉(zhuǎn)速穩(wěn)定后將電磁轉(zhuǎn)矩方程作為一個辨識方程,結(jié)合電動機(jī)的直軸電壓和交軸電壓方程,模型方程的秩數(shù)為3,可實(shí)現(xiàn)電動機(jī)的3個參數(shù)在線辨識[10]。
本文提出一種梯形波電流注入的IPMSM多參數(shù)在線辨識方法。采用遺忘因子遞推最小二乘算法(forgetting factor recursive least square,FFRLS),辨識IPMSM的定子電阻、直軸電感、交軸電感和轉(zhuǎn)子永磁磁鏈,解決4個參數(shù)同時在線辨識所存在的欠秩問題,并且梯形波電流注入法減小電動機(jī)的轉(zhuǎn)矩脈動。為實(shí)現(xiàn)辨識參數(shù)的快速和準(zhǔn)確的收斂,研究持續(xù)激(persistence of excitation,PE)條件。在兩相同步旋轉(zhuǎn)坐標(biāo)系中對逆變器的非線性進(jìn)行建模分析,減小逆變器的非線性對IPMSM參數(shù)辨識精度的影響。仿真和實(shí)驗(yàn)結(jié)果證明所提出的多參數(shù)在線辨識方法的有效性。
1 IPMSM多參數(shù)在線辨識模型
1.1 IPMSM數(shù)學(xué)模型
假設(shè)IPMSM磁路不飽和,氣隙磁場呈正弦波分布,不計(jì)磁滯和渦流損耗,IPMSM在兩相旋轉(zhuǎn)坐標(biāo)系下的電壓和電磁轉(zhuǎn)矩方程[11-13]為:
(1)
式中:pn是極對數(shù);Te是電磁轉(zhuǎn)矩;R是定子電阻;ψm轉(zhuǎn)子永磁磁鏈;Lq和Ld分別是交軸電感和直軸電感;p是拉普拉斯算子;ω是電角速度;iq和id分別是交軸電流和直軸電流;uq和ud分別是交軸電壓和直軸電壓。
基于IPMSM的穩(wěn)態(tài)離散模型辨識電動機(jī)的參數(shù)[14],式(1)簡化為:
(2)
由式(2)可知,兩個電壓方程中存在為R、ψm、Lq和Ld共4個未知參數(shù),方程存在欠秩問題,無法保證辨識參數(shù)收斂到實(shí)際值。
1.2 逆變器非線性分析
IPMSM多參數(shù)在線辨識主電路采用三相逆變器。由于受到死區(qū)時間設(shè)置,功率器件開通、關(guān)斷的延遲時間和功率器件飽和壓降、體二極管導(dǎo)通壓降等因素影響,逆變器輸出電壓將產(chǎn)生一定誤差。現(xiàn)有方法將給定電壓代替實(shí)際電壓,忽略了逆變器非線性影響,導(dǎo)致IPMSM參數(shù)辨識產(chǎn)生誤差。
在兩相同步旋轉(zhuǎn)坐標(biāo)系下,直軸電壓誤差ud_err和交軸電壓誤差uq_err為
(3)
式中:Dd和Dq為直軸電壓和交軸電壓死區(qū)畸變系數(shù);θe為轉(zhuǎn)子電角位置;Vdead為輸出電壓誤差,定義為
其中:Ton和Toff分別為功率器件的開通和關(guān)斷時間;Vsat和Vd分別為功率器件和二極管的正向?qū)▔航担籚dc為測量的直流母線電壓;Kτ(θ)為
電動機(jī)穩(wěn)態(tài)運(yùn)行時,輸出電壓誤差Vdead可認(rèn)為是恒定的。在不同的內(nèi)功率因數(shù)角γ下,圖1為Dd和Dq的波形。由圖1可見,死區(qū)時間設(shè)置導(dǎo)致直軸和交軸電壓出現(xiàn)了六倍基頻脈動,影響IPMSM參數(shù)辨識精確度。
1.3 基于FFRLS的在線參數(shù)辨識設(shè)計(jì)
考慮逆變器非線性影響,式(2)進(jìn)一步表示為
(4)
注入的梯形波電流會引起直軸電感和交軸電感變化,注入K個梯形波電流,直軸電壓和交軸電壓方程為
(5)
式中,i=1, 2, ……,K。
在IPMSM進(jìn)入穩(wěn)定狀態(tài)時注入梯形波電流。在200 ms內(nèi)有序注入兩個梯形波電流,電流控制器的響應(yīng)時間設(shè)計(jì)為小于10 ms,測量數(shù)據(jù)的采集延遲10 ms。在100 ms內(nèi),認(rèn)為R和ψm恒定,但是交、直軸電感會隨著交、直軸電流而變化。由于注入的梯形波幅度較小,交軸電流基本保持恒定,直軸電感的變化主要受直軸電流的影響,即忽略交叉飽和效應(yīng),優(yōu)化后的電感模型為:
(6)
式中:Ld0和Lq0為離線的直軸電感和交軸電感;Ad和Aq為直軸磁路和交軸磁路飽和系數(shù)。
將式(6)代入式(5)得:
(7)
由式(1)中的電磁轉(zhuǎn)矩和式(5)得
(8)
式中Tei為第i個梯形波電流時的電磁轉(zhuǎn)矩。
注入的梯形波電流可以在較短的時間內(nèi)完成,比機(jī)械系統(tǒng)的響應(yīng)速度快得多。因此,在梯形波電流注入期間可認(rèn)為負(fù)載轉(zhuǎn)矩一定,即為
Tei=Tej,0≤i,j≤K,i≠j。
(9)
結(jié)合式(8)和式(9)可得R和Vdead的辨識模型為
ωjAi-ωiAj=R(ωjBi-ωiBj)-Vdead(ωjCi-ωiCj)。
(10)
式中Ai、Aj、Bi、Bj、Ci和Cj為:
(11)
(12)

(13)
(14)
(15)
根據(jù)上述推導(dǎo)待辨識參數(shù)的矩陣,本文提出的梯形波電流注入的IPMSM多參數(shù)在線辨識方法如圖2所示。
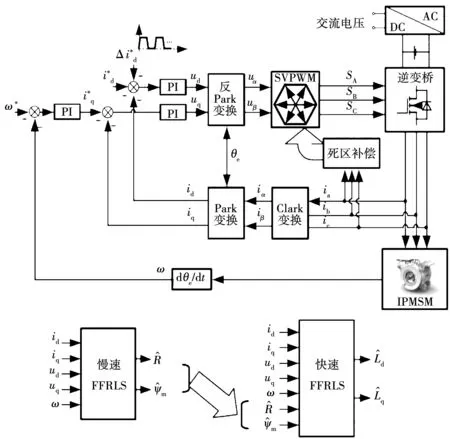
圖2 梯形波電流注入的IPMSM多參數(shù)在線辨識方法
圖3表示梯形波電流注入策略,提出的梯形波電流注入法可以在200 ms內(nèi)完成。在IPMSM進(jìn)入穩(wěn)定狀態(tài)時注入梯形波電流。在 200 ms內(nèi)注入兩個梯形波電流,電流調(diào)節(jié)器的響應(yīng)時間設(shè)計(jì)為小于10 ms,測量數(shù)據(jù)的采集延遲10 ms。
經(jīng)紫外可見分光光度法掃描發(fā)現(xiàn),2種溶液于350 nm處出現(xiàn)最大吸收。因此,確定試驗(yàn)測定波長為350 nm。
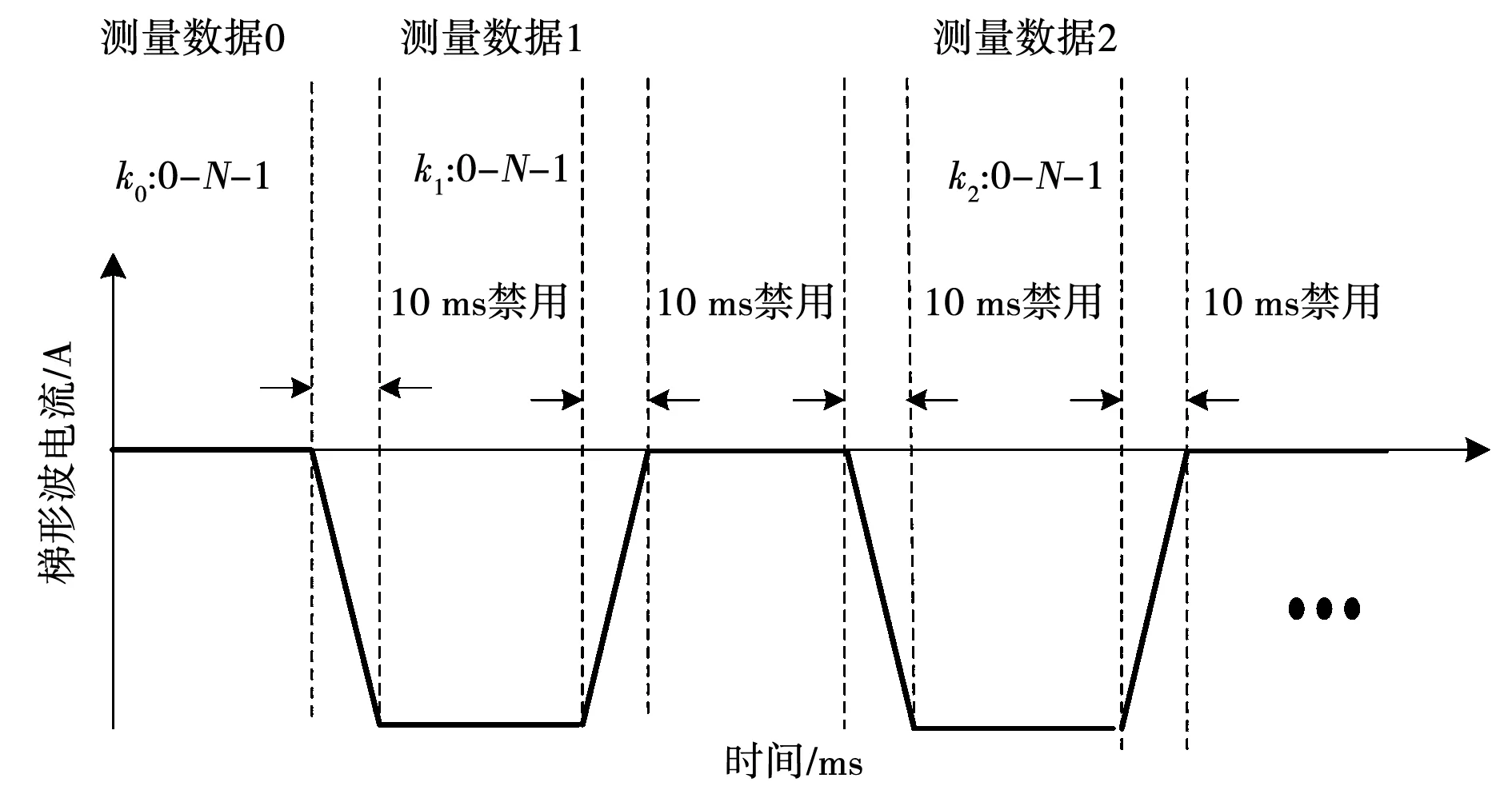
圖3 梯形波電流注入策略
本文采用快速FFRLS算法估計(jì)IPMSM的電感,采用慢速FFRLS算法估計(jì)IPMSM的定子電阻和轉(zhuǎn)子永磁磁鏈。在梯形波電流注入的一個周期內(nèi),假設(shè)定子電阻和轉(zhuǎn)子永磁磁鏈保持恒定,快速FFRLS算法以電流采樣速率辨識交軸電感和直軸電感。慢速FFRLS算法以速度環(huán)的執(zhí)行頻率辨識定子電阻和轉(zhuǎn)子永磁磁鏈。
快速FFRLS算法辨識電感的矩陣為:
(16)
慢速FFRLS算法辨識定子電阻和轉(zhuǎn)子永磁磁鏈的矩陣為:
(17)
1.4 基于FFRLS的在線參數(shù)辨識持續(xù)激勵條件

為實(shí)現(xiàn)待辨識參數(shù)收斂的快速性和準(zhǔn)確性,Φ必須要滿足PE條件
(18)
在離散控制系統(tǒng)中,式(17)可表示為
(19)
(20)
如果P是有界的,Φ將滿足PE條件,并且P的有界條件可在軟件代碼中實(shí)現(xiàn)。因此,根據(jù)式(20),Φ滿足PE條件為
(21)
2 仿真和實(shí)驗(yàn)研究
本文仿真和實(shí)驗(yàn)用的電流環(huán)執(zhí)行頻率為16 kHz,速度環(huán)執(zhí)行頻率為2 kHz,注入的梯形波電流頻率為10 Hz。表1為仿真和實(shí)驗(yàn)用IPMSM主要參數(shù)。
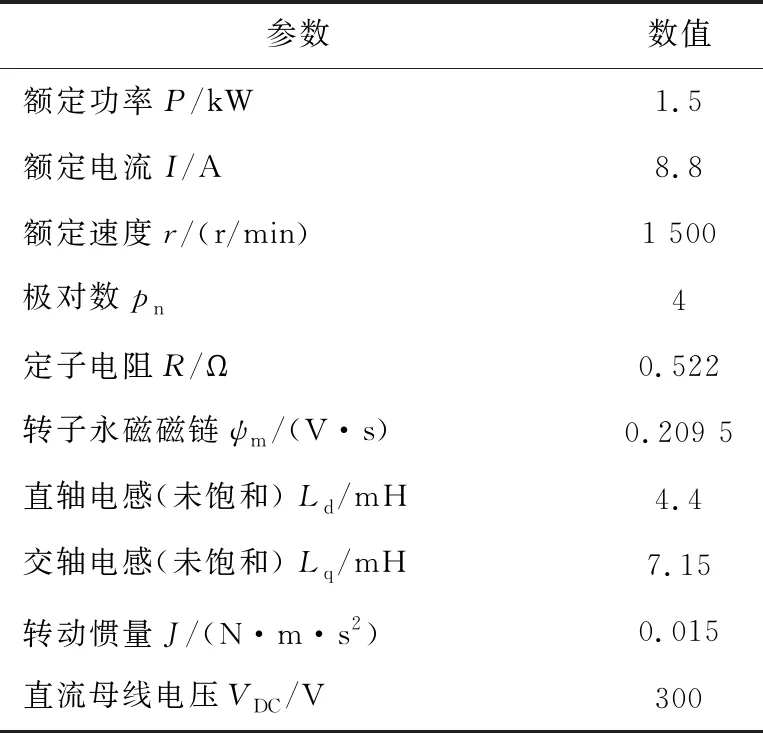
表1 IPMSM主要參數(shù)
2.1 仿真研究
基于圖2,在MATLAB/Simulink中搭建了采用梯形波電流注入的IPMSM參數(shù)在線辨識仿真模型。該仿真模型求解器設(shè)置為定步長類型,求解算法采用龍格庫塔算法,仿真時間設(shè)置為5 s。交軸電流環(huán)的調(diào)節(jié)器參數(shù)為:Kpq=Lq×1 100,Kiq=R×1 100,直軸電流環(huán)的調(diào)節(jié)器參數(shù)為:Kpd=Ld×1 100,Kid=R×1 100,速度環(huán)調(diào)節(jié)器參數(shù)為Kps= 0.14,Kis=7。
采用本文提出的梯形波電流注入的IPMSM多參數(shù)在線辨識方法,圖4為辨識的IPMSM定子電阻、轉(zhuǎn)子永磁磁鏈、直軸電感和交軸電感值。由圖4(a)和圖4(b)可知,慢速FFRLS算法辨識的定子電阻誤差為7%,轉(zhuǎn)子永磁磁鏈誤差為0.5%。由于定子電阻壓降在電壓方程中占比較大,采樣和測量誤差造成的定子電阻辨識值誤差偏大。0.35 s后,慢速FFRLS算法進(jìn)入穩(wěn)定,將定子電阻和轉(zhuǎn)子永磁磁鏈的辨識值作為快速FFRLS算法輸入值,辨識IPMSM的直軸電感和交軸電感。由圖4(c)和圖4(d)可知,0.5 s后啟動快速FFRLS算法,該算法迅速收斂到穩(wěn)定值。采用快速FFRLS算法辨識的直軸電感誤差為5%,交軸電感誤差為3%,直軸電感和交軸電感辨識誤差在可接受的范圍內(nèi)。
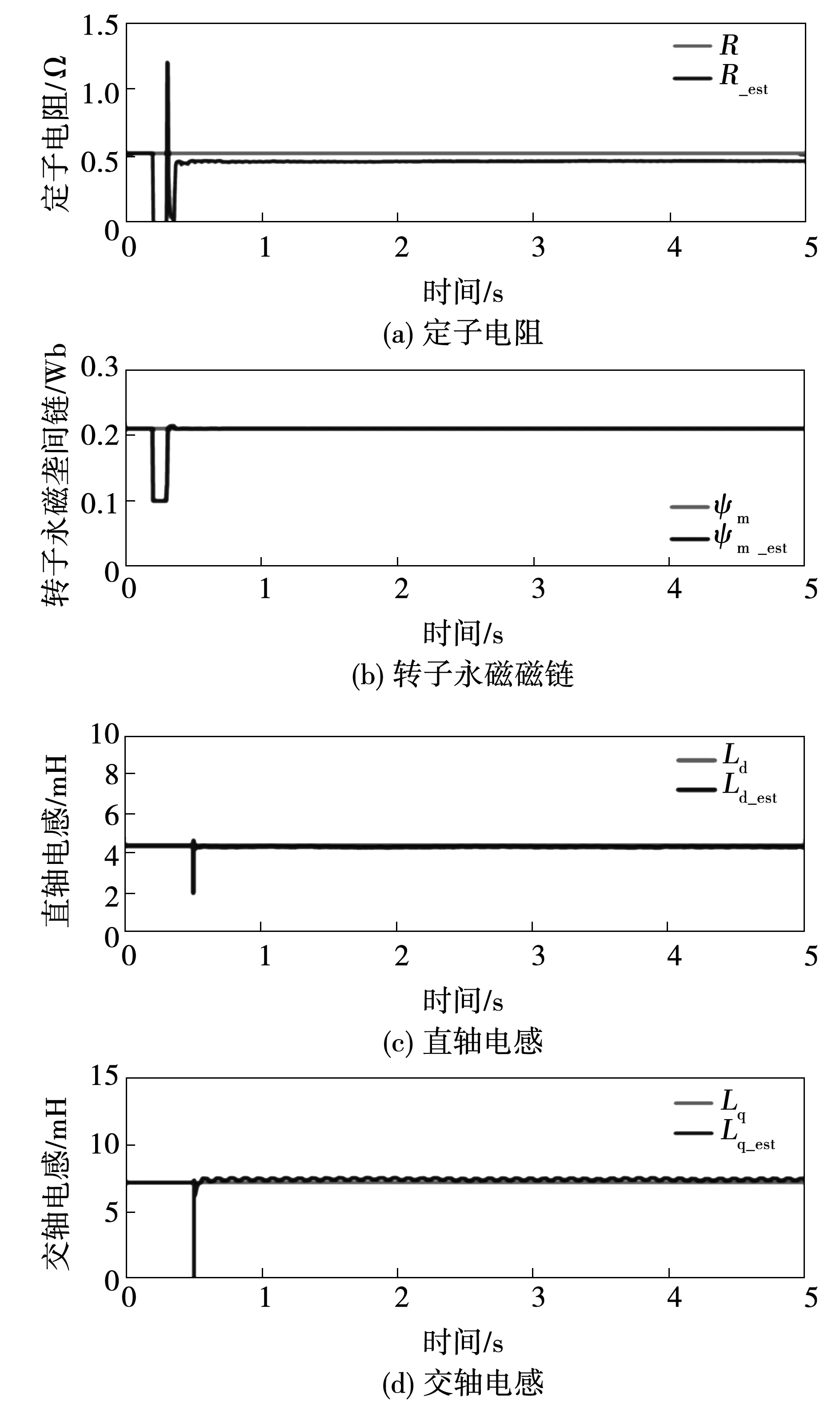
圖4 基于所提出算法的IPMSM多參數(shù)辨識仿真結(jié)果
注入直軸的方波電流和梯形波電流如圖5所示,其中兩種電流幅值為2 A。由于注入的梯形波電流沒有階躍過程,相比于方波電流注入法,如圖6所示,IPMSM的轉(zhuǎn)矩脈動相對較低。
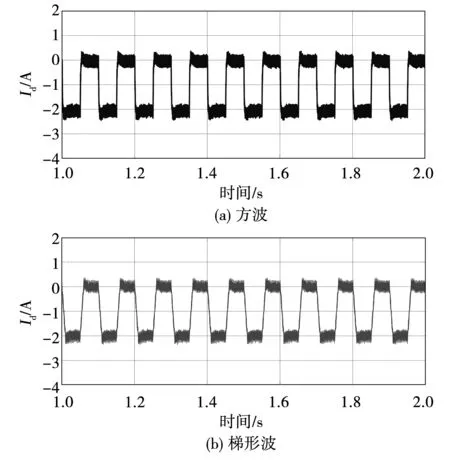
圖5 直軸電流注入類型
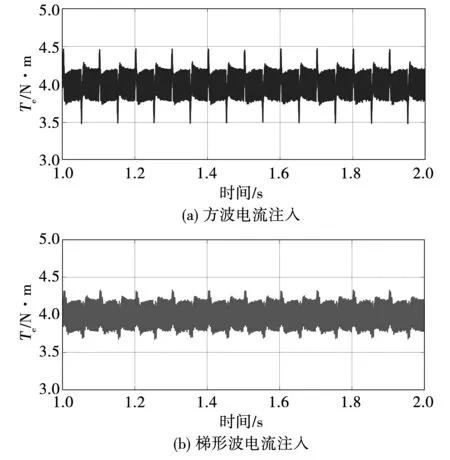
圖6 不同直軸電流注入的IPMSM的轉(zhuǎn)矩波形
2.2 實(shí)驗(yàn)研究
基于ST公司開發(fā)的STM32F4單片機(jī),搭建了如圖7所示的系統(tǒng)實(shí)驗(yàn)平臺,以驗(yàn)證本文所提出的梯形波電流注入的IPMSM多參數(shù)在線辨識方法的正確性和有效性。平臺主要由驅(qū)動器、測試用伺服電機(jī)、負(fù)載用直流電機(jī)、控制器以及扭矩傳感器等部分組成,其中伺服電機(jī)參數(shù)詳見表1。
基于圖7所示的系統(tǒng)實(shí)驗(yàn)平臺,采用本文所提出的梯形波電流注入的IPMSM多參數(shù)在線辨識方法,圖8為辨識的IPMSM定子電阻、轉(zhuǎn)子永磁磁鏈、直軸電感和交軸電感。由圖8(a)和圖8(b)可知,慢速FFRLS算法辨識的定子電阻誤差為7%,轉(zhuǎn)子永磁磁鏈誤差為0.5%。慢速FFRLS算法穩(wěn)定后,將定子電阻和轉(zhuǎn)子永磁磁鏈辨識值作為快速FFRLS算法的輸入值,辨識直軸電感和交軸電感值。由圖8(c)和圖8(d)可知,1.5s后啟動快速FFRLS算法,辨識的直軸電感誤差為5%,交軸電感誤差為3%,辨識誤差在可接受的范圍內(nèi)。

圖7 系統(tǒng)實(shí)驗(yàn)平臺
采用慢速FFRLS算法也可用于辨識直軸電感和交軸電感,辨識結(jié)果如圖9所示。但慢速FFRLS算法辨識的直軸電感和交軸電感波動大、收斂速度慢。因此,不宜采用慢速FFRLS算法辨識直軸電感和交軸電感。
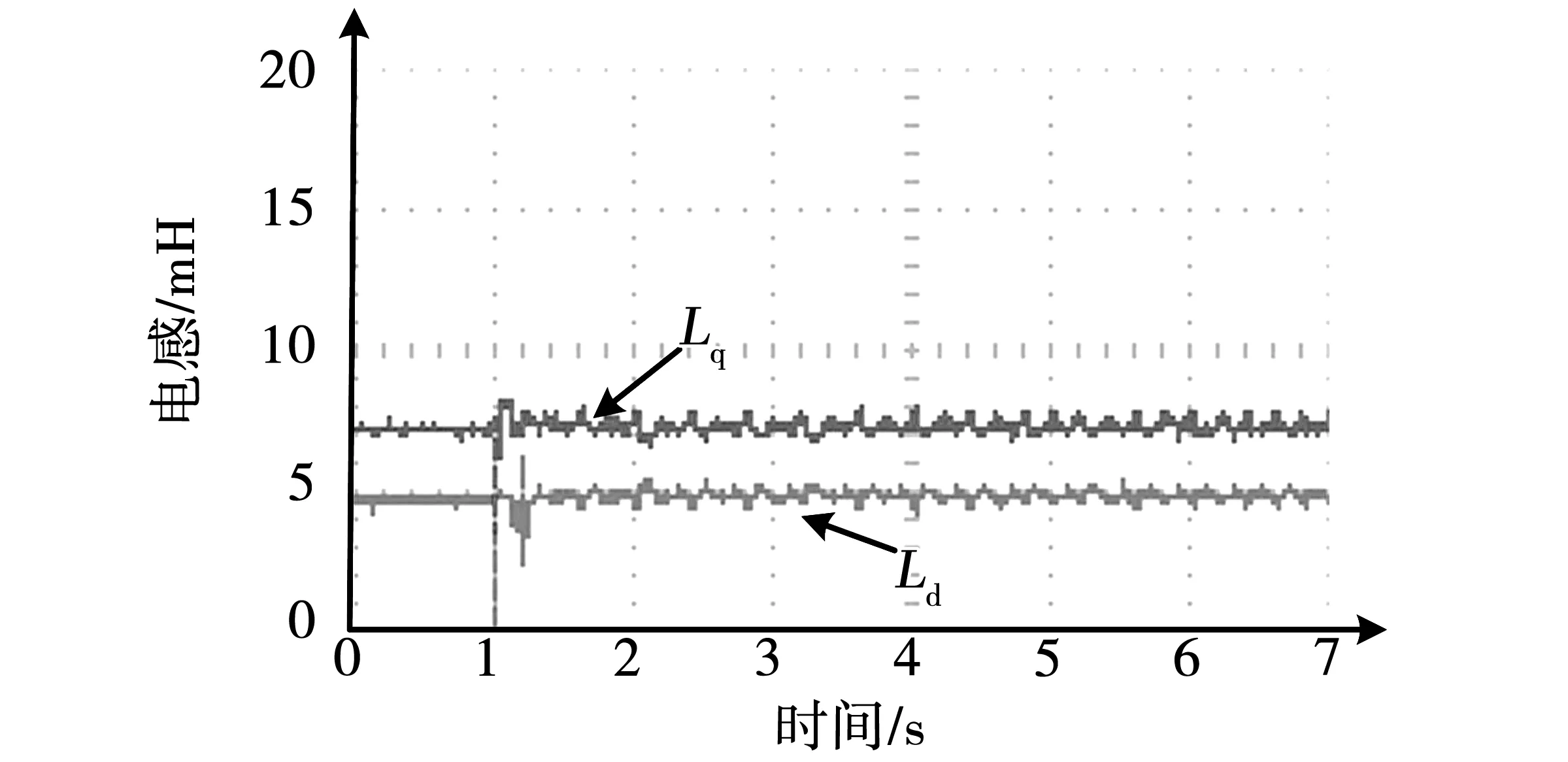
圖9 基于慢速FFRLS算法的直軸電感和交軸電感辨識實(shí)驗(yàn)結(jié)果
3 結(jié) 論
本文在IPMSM數(shù)學(xué)模型的基礎(chǔ)上,提出了梯形波電流注入的IPMSM多參數(shù)在線辨識方法,實(shí)現(xiàn)IPMSM的定子電阻、轉(zhuǎn)子永磁磁鏈、直軸電感和交軸電感的在線辨識,而且辨識結(jié)果接近電動機(jī)的實(shí)際參數(shù)。在兩相同步旋轉(zhuǎn)坐標(biāo)系下對逆變器的非線性特性進(jìn)行建模,分析逆變器非線性導(dǎo)致的直軸電壓和交軸電壓的畸變量分別為6次諧波脈動。梯形波電流注入的IPMSM多參數(shù)在線辨識方法可推廣應(yīng)用于IPMSM 的無位置傳感器控制、解耦控制及自適應(yīng)控制中。