復(fù)雜網(wǎng)絡(luò)輸出反饋量化同步控制
2022-06-23 07:13:26石宇靜胡昌敏李善強
電機與控制學(xué)報 2022年5期
關(guān)鍵詞:方法
石宇靜, 胡昌敏, 李善強
(1.福建工程學(xué)院 計算機科學(xué)與數(shù)學(xué)學(xué)院,福建 福州 350118;2. 哈爾濱理工大學(xué) 數(shù)學(xué)系,黑龍江 哈爾濱 150080)
0 引 言
復(fù)雜網(wǎng)絡(luò)普遍存在于我們的生活以及工程中, 如萬維網(wǎng)、互聯(lián)網(wǎng)、生命科學(xué)[1]等。近幾年, 由于復(fù)雜網(wǎng)絡(luò)的廣泛應(yīng)用,復(fù)雜網(wǎng)絡(luò)的研究吸引了越來越多學(xué)者關(guān)注。同步是復(fù)雜網(wǎng)絡(luò)的一種普遍現(xiàn)象。復(fù)雜網(wǎng)絡(luò)同步控制的方法主要包括牽制控制[2-3]、脈沖控制[4]、滑模控制[5-6]和間歇控制[7]等。
目前復(fù)雜網(wǎng)絡(luò)同步控制的研究多數(shù)采用狀態(tài)反饋控制方法。但在實際中,由于復(fù)雜網(wǎng)絡(luò)包含眾多節(jié)點以及各種條件的限制,復(fù)雜網(wǎng)絡(luò)節(jié)點的狀態(tài)往往不便測量或者測量成本過高,因此研究有效的輸出反饋同步控制方法是極具現(xiàn)實意義的。文獻[8]研究了基于狀態(tài)觀測器方法的復(fù)雜網(wǎng)絡(luò)輸出反饋同步控制問題, 利用Lyapunov穩(wěn)定性理論,得到了保證復(fù)雜網(wǎng)絡(luò)同步的充分條件。文獻[9]研究了帶有執(zhí)行器飽和以及概率故障的時滯復(fù)雜網(wǎng)絡(luò)輸出反饋同步控制問題。利用Lyapunov-Krasovskii函數(shù)法和隨機分析技術(shù)證明了同步誤差系統(tǒng)和觀測誤差系統(tǒng)的漸近穩(wěn)定性,并且給出了原點吸引域估計的凸優(yōu)化算法。文獻[10]研究了復(fù)雜網(wǎng)絡(luò)的自適應(yīng)輸出反饋同步控制問題,考慮了系統(tǒng)執(zhí)行器的偏差故障,利用線性矩陣不等式技術(shù)得到了同步誤差范數(shù)有界的充分條件。
另一方面,在網(wǎng)絡(luò)化系統(tǒng)中,由于信號傳輸過程中傳輸容量的限制、 數(shù)據(jù)包的有限字長等原因,通常需要對經(jīng)由有限速率網(wǎng)絡(luò)傳輸給下一個節(jié)點的信號進行量化。量化器的引入解決了一些數(shù)字信號不易編碼的問題,同時也減輕了信息傳輸對網(wǎng)絡(luò)帶寬的壓力。量化現(xiàn)象對復(fù)雜網(wǎng)絡(luò)同步性能的影響不容忽略,因此,近些年對于復(fù)雜網(wǎng)絡(luò)的量化同步控制問題已涌現(xiàn)了一些研究結(jié)果。例如,文獻[11]設(shè)計了量化牽制同步控制器,其特點是控制器中不含有符號函數(shù)避免了抖動現(xiàn)象,并給出了復(fù)雜網(wǎng)絡(luò)固定時間穩(wěn)定的判別準(zhǔn)則。文獻[12]利用量化同步控制的方法,研究了具有不連續(xù)節(jié)點的復(fù)雜網(wǎng)絡(luò)有限時間同步控制問題。文獻[13]設(shè)計了量化間歇同步控制器,利用多重Lyapunov函數(shù)法和凸組合技術(shù),研究了復(fù)雜網(wǎng)絡(luò)的有限時間同步控制問題,并給出了設(shè)定時間估計的最優(yōu)算法。但上述復(fù)雜網(wǎng)絡(luò)量化同步控制的研究都是采用狀態(tài)反饋控制策略,而當(dāng)網(wǎng)絡(luò)節(jié)點的狀態(tài)不可測時,上述控制策略均不能適用。
基于上述分析,本文研究復(fù)雜網(wǎng)絡(luò)的輸出反饋量化同步控制問題。主要貢獻可歸納如下:1)為了減輕信號傳輸對網(wǎng)絡(luò)帶寬的壓力,采用對數(shù)量化器對控制輸入信號進行量化。并利用范數(shù)有界不確定性的方法處理控制量化問題,分析量化對復(fù)雜網(wǎng)絡(luò)同步性能的影響。2)通過設(shè)計狀態(tài)觀測器獲得網(wǎng)絡(luò)節(jié)點的狀態(tài)估計,以該狀態(tài)估計為基礎(chǔ)給出復(fù)雜網(wǎng)絡(luò)輸出反饋量化同步控制器的設(shè)計方法。3)通過Lyapunov 穩(wěn)定性理論以及線性矩陣不等式技術(shù), 得到保證觀測誤差和同步誤差漸近收斂的充分條件。
1 問題描述
考慮由N個節(jié)點構(gòu)成的復(fù)雜網(wǎng)絡(luò),且第i個節(jié)點的動態(tài)模型為:
(1)
其中xi(t)∈n,ui(t)∈m,yi(t)∈q分別表示復(fù)雜網(wǎng)絡(luò)第i個節(jié)點的狀態(tài)向量,控制輸入和測量輸出。A∈n×n,B∈n×m,C∈q×n,且矩陣B為列滿秩矩陣。g(·)∈n是一個非線性函數(shù)向量。Γ是對角的內(nèi)部耦合矩陣。Φ=(φij)N×N表示外部耦合矩陣,當(dāng)i≠j時,若第i個節(jié)點與第j個節(jié)點有連接,則φij>0,否則φij=0,且
令x0(t)∈n是復(fù)雜網(wǎng)絡(luò)中孤立節(jié)點的狀態(tài),假定它是唯一的, 并且滿足如下方程:
(2)
其中y0(t)∈q是復(fù)雜網(wǎng)絡(luò)孤立節(jié)點的測量輸出。
考慮系統(tǒng)(1)中的狀態(tài)是不可測的,設(shè)計如下形式的狀態(tài)觀測器:
(3)

LiCξi(t)。
(4)

定義同步誤差為ei(t)=xi(t)-x0(t),由式(1)和式(2)可得,同步誤差動態(tài)方程可以表示為
Bui(t)。
(5)
其中f(ei(t))=g(xi(t))-g(x0(t))。
假設(shè)1:對于任意的a,b∈n,非線性向量函數(shù)g(xi(t))滿足以下條件:
‖g(a)-g(b)‖≤d‖a-b‖,
其中d≥0是一個已知的常數(shù)。
引理1[14]對于任意的兩個向量x,y∈n,有下列不等式成立:
xΤy+yΤx≤λxΤx+λ-1yΤy。
其中λ>0是一個常數(shù)。
引理2[15]M,N,F是具有適當(dāng)維數(shù)的實矩陣,且F滿足FΤF≤I,那么對于任意的標(biāo)量ε>0,有
MFN+NΤFΤMΤ≤ε-1MMΤ+εNΤN。
2 量化同步控制器設(shè)計
令φ(·):→為對數(shù)量化器,其中={±ωi:ωi=ρiω0,i=±1,±2,…,}∪{±ω0}∪{0},且ω0>0。對于?τ∈,相應(yīng)的對數(shù)量化器可表示為:
(6)
對于第i個節(jié)點,設(shè)計如下量化控制器:
(7)

又由式(6)可得
[In+Λi](ei(t)-ξi(t))。
(8)
其中Λi=diag{Λi1,Λi2,…,Λin},且Λij∈[-δi,δi]。
根據(jù)式(8),量化控制器式(7)可以進一步表示成如下形式:
ui(t)=-Ki[In+Λi]ei(t)+Ki[In+Λi]ξi(t)。
(9)
將式(9)代入式(5),則同步誤差系統(tǒng)可以改寫為
BKi[In+Λi]ei(t)+
BKi[In+Λi]ξi(t)。
(10)


(11)

由于矩陣B∈n×m列滿秩,即rank(B)=m,則有那么存在正交矩陣U∈Nn×Nn,V∈Nm×Nm使得下列等式成立:
(12)


(13)
其中P11>0∈Nm×Nm,P22>0∈N(n-m)×N(n-m),則存在非奇異矩陣R∈Nm×Nm使得
另外,容易得到觀測誤差動態(tài)系統(tǒng)(4)的增廣形式為

(14)

若令η(t)=[eΤ(t)ξΤ(t)]Τ,由式(11)和式(14)可得如下閉環(huán)系統(tǒng)方程:

(15)
其中

3 主要結(jié)果
(16)
其中
(IN?AΤ+ΦΤ?Γ)P1-
(IN?AΤ+ΦΤ?Γ)P2-
則在量化控制器(7)的作用下閉環(huán)系統(tǒng)(15)漸近穩(wěn)定,且控制器和觀測器增益矩陣分別為
證明:選取如下Lyapunov函數(shù)
V(t)=ηΤ(t)Pη(t)
(17)
由假設(shè)1可知:
‖f(ei(t))‖=‖g(xi(t))-g(x0(t))‖≤
di‖xi(t)-x0(t)‖=
di‖ei(t)‖。
從而有
eΤ(t)(D?In)e(t)。
(18)

hΤ(ξ(t))h(ξ(t))≤ξΤ(t)(Θ?In)ξ(t)。
(19)

(20)
(21)
將式(20)和式(21)代入式(17),則有:
λ1Ξ+λ2Q]η(t)=ηΤ(t)Ωη(t)。
(22)


(23)
其中
(IN?AΤ+ΦΤ?Γ)P1-
根據(jù)引理3可知,存在非奇異矩陣R∈Nm×Nm使得由式(12)和式(13)可得
即有:
因此R=(VΤ)-1Σ-1P11ΣVΤ,由此可得:


(24)
其中
由式(24),應(yīng)用Schur補引理可知,若有下面的不等式成立,則可保證Ω<0。
(25)
4 仿真
根據(jù)文獻[17],考慮由5個蔡氏電路構(gòu)成的復(fù)雜網(wǎng)絡(luò)。單個蔡氏電路如圖1所示,且其動態(tài)方程描述如下:
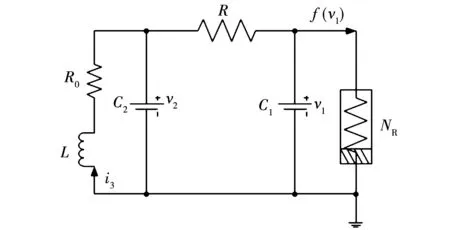
圖1 蔡氏電路
其中:v1、v2分別表示電容C1、C2兩端的電壓;i3表示通過電感器L的電流;R0、R是線性電阻;f(v1)表示通過非線性電阻NR的電流,且
f(v1)=Gb1v1+0.5(Ga1-Gb1)(|v1+1|-|v1-1|)。
根據(jù)文獻[18],將反饋控制與電感串聯(lián)構(gòu)成電源u(t),因此復(fù)雜網(wǎng)絡(luò)可以表示成如下形式:

令復(fù)雜網(wǎng)絡(luò)的外部耦合矩陣為:
如文獻[18],選擇p=9.1,q=1,r=1,Gb1=-0.755 9,Ga1=-1.393 86,v=16.581 1,z=0.138 083,w=0.09。選擇量化密度ρ=0.7,參數(shù)d=0.039,q=0.033。選擇內(nèi)部耦合矩陣為Γ=diag{0.05,0.05,0.05}以及網(wǎng)絡(luò)各個節(jié)點和孤立節(jié)點的初始狀態(tài)分別為:
x1(0)=[0.01,-0.01,0]T;
x2(0)=[0.03,-0.02,-0.05]T;
x3(0)=[0.07,-0.02,-0.03]T;
x4(0)=[0.01,-0.02,0]T;
x5(0)=[0.03,0.02,-0.05]T;
x0(0)=[0.02,0.01,-0.01]T。
首先, 考慮不對復(fù)雜網(wǎng)絡(luò)施加控制的開環(huán)響應(yīng)如圖2所示,從圖2可見開環(huán)情況下同步誤差軌跡是發(fā)散的。
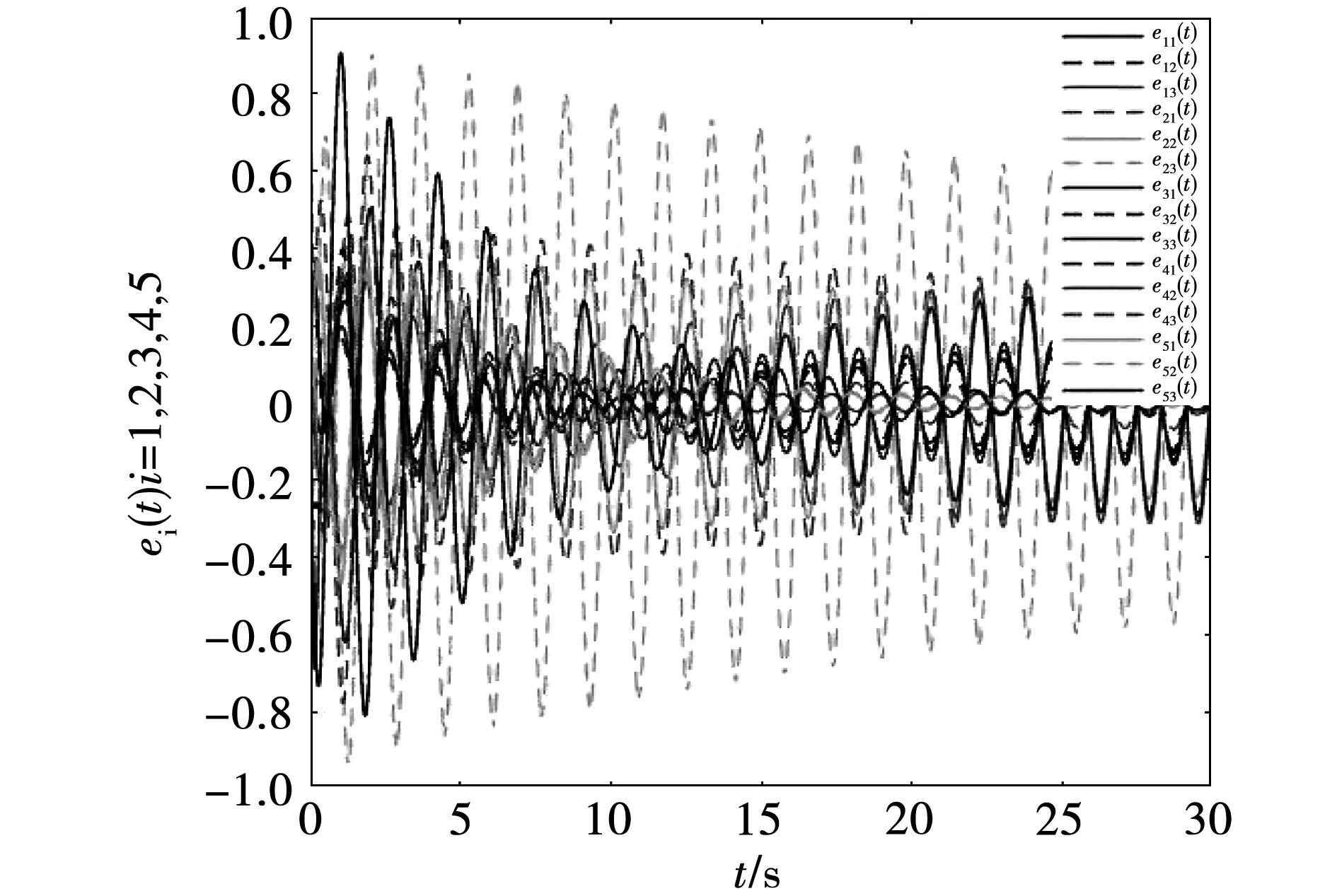
圖2 開環(huán)軌跡
然后,將量化輸出反饋同步控制器式(7)作用于蔡氏電路網(wǎng)絡(luò),且選擇觀測器的初始狀態(tài)為:
ξ1(0)=[0.01,-0.01,0]Τ;
ξ2(0)=[0.03,-0.02,-0.05]Τ;
ξ3(0)=[0.07,-0.02,-0.03]Τ;
ξ4(0)=[0.01,-0.02,0]Τ;
ξ5(0)=[0.03,0.02,-0.05]Τ。
利用MATLAB LMI工具箱, 通過求解線性矩陣不等式(16),根據(jù)定理1可求得觀測器增益矩陣為:
以及控制器增益矩陣為:
觀測誤差以及同步誤差在控制器(7)作用下的閉環(huán)軌跡如圖3和圖4所示。根據(jù)圖3和圖4發(fā)現(xiàn)可知觀測誤差動態(tài)以及同步誤差動態(tài)系統(tǒng)均可在量化輸出反饋控制器(7)的作用下達到漸近穩(wěn)定。
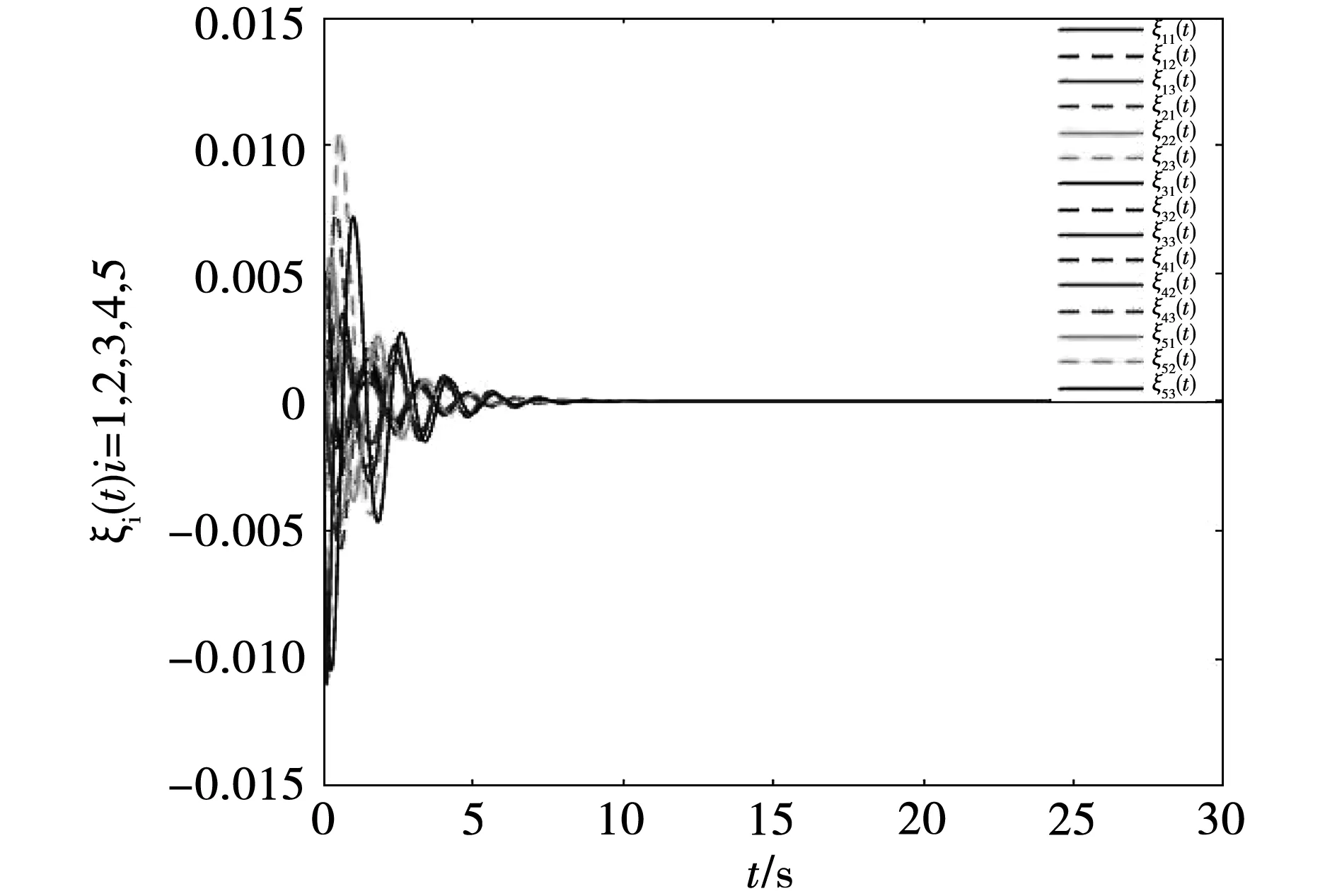
圖3 觀測誤差閉環(huán)軌跡
為了進一步說明本文所給控制方法的有效性,將本文設(shè)計的控制方法與文獻[19]中的控制方法進行對比。文獻[19]的自適應(yīng)控制器與自適應(yīng)更新律分別為如下形式:
ui(t)=-di(t)CΤεi(t)(1+‖εi(t)‖2(p-1));
(26)
(27)
其中:εi(t)=yi(t)-y0(t)表示輸出誤差;di(t)是控制器的自適應(yīng)增益,i=1,…,N,p為正整數(shù),κk為正常數(shù)。仿真時選擇參數(shù)κk=5,p=1,則在控制器式(26),式(27)的作用下,復(fù)雜網(wǎng)絡(luò)同步誤差的軌跡如圖5所示。
比較兩種控制方法的同步誤差軌跡圖4和圖5,可見在控制器式(26),式(27)的作用下,復(fù)雜網(wǎng)絡(luò)的同步誤差達到穩(wěn)定的時間需要20 s,而利用本文設(shè)計的控制器只需要8 s,即利用本文所給的控制方法復(fù)雜網(wǎng)絡(luò)同步誤差收斂的速度更快。
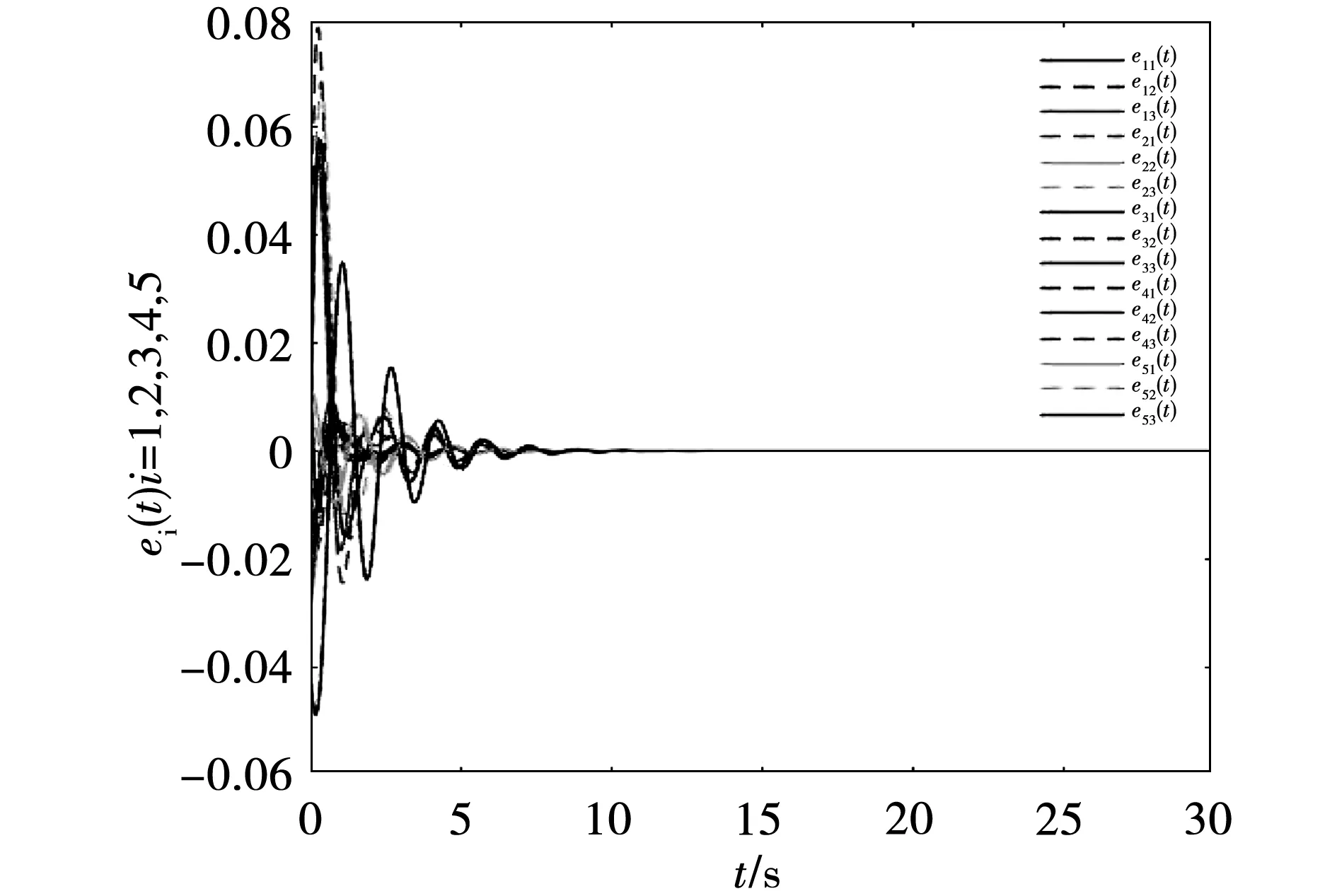
圖4 同步誤差閉環(huán)軌跡
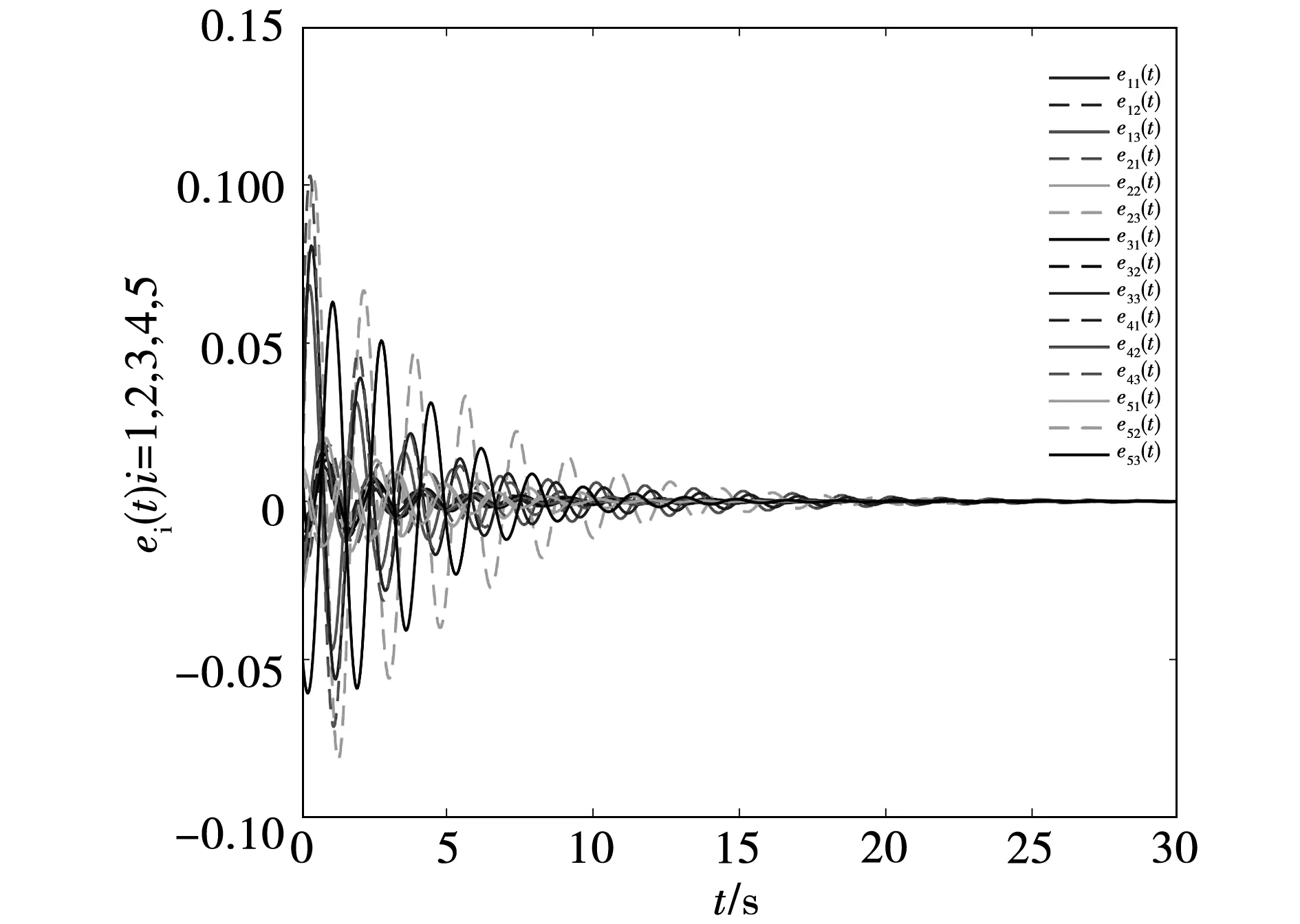
圖5 采用文獻[19]控制方法的同步誤差軌跡
5 結(jié)論
本文主要研究了復(fù)雜網(wǎng)絡(luò)的量化同步控制問題。基于狀態(tài)觀測器,設(shè)計了帶有對數(shù)量化的輸出反饋同步控制器。應(yīng)用LMI技術(shù)給出了求解觀測器增益矩陣以及控制器增益矩陣的計算方法。利用Lyapunov穩(wěn)定性理論,證明了觀測誤差動態(tài)系統(tǒng)以及同步誤差動態(tài)系統(tǒng)的漸近穩(wěn)定性。最后,通過蔡氏電路仿真實驗驗證了所提控制方法的可行性和有效性。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56