充電樁三相AC/DC雙向變換器控制策略研究
2022-06-24 03:35:26施文燁何志琴朱佑滔
汽車技術 2022年6期
施文燁 何志琴 朱佑滔
(貴州大學,貴陽 550025)
主題詞:充電樁 雙向變換器 空間矢量脈寬調制技術 有源功率因數校正 建模仿真
1 前言
近年來,新能源汽車發展迅猛,但目前仍然面臨著許多技術瓶頸,如充電樁的充電效率、電能質量以及只能被動單向充電等。文獻[1]研究表明,不同的充電樁結構對電能的質量有很大影響。文獻[2]研究表明,三相電流型脈寬調制(Pulse Width Modulation,PWM)整流器輸出的直流電壓低于輸入電壓的峰值,且由于輸入電流不連續,其功率因數較低。文獻[3]闡明,傳統整流裝置的功率因數通常在0.45~0.75 范圍內,所以傳統大功率整流器所產生的諧波會嚴重影響電網的電能質量。文獻[4]提及,J.W.Kolar 教授提出了三相VIENNA 整流電路,雖然實現了升降壓輸出,但其開關損耗較大,同時不能實現電能的雙向變換,控制電路的參數設計較為困難。文獻[5]所研究的T 型三電平電路具有中點續流的能力,降低了開關導通損耗,改善了輸出紋波且可以實現電能的雙向流通,但其主電路結構和控制電路較為復雜,開關元器件較多,內管應力較大。文獻[6]~文獻[10]提到,對于混合微電網而言,連接交流母線和直流母線的AC/DC 雙向變換器對系統電壓的穩定和電能質量的提高產生了巨大的影響。針對上述問題,本文提出一種三相AC/DC雙向變換器,給出在整流和逆變2種模式下的數學模型和空間矢量脈寬調制(Space Vector Pulse Width Modulation,SVPWM)控制策略,并利用MATLAB/Simulink搭建仿真模型驗證該方案的可行性。
2 三相AC/DC雙向變換器數學模型
圖1所示為三相AC/DC雙向變換器的拓撲結構,其中,、、為網側三相電壓,、、為網側三相電流,為電路等效電阻,為網側電感,、分別為直流母線電壓、電流,為直流側濾波電容,為負載電阻。在整流模式下(逆變模式過程相同),三相靜止坐標中的數學模型為:

圖1 變換器電力拓撲結構
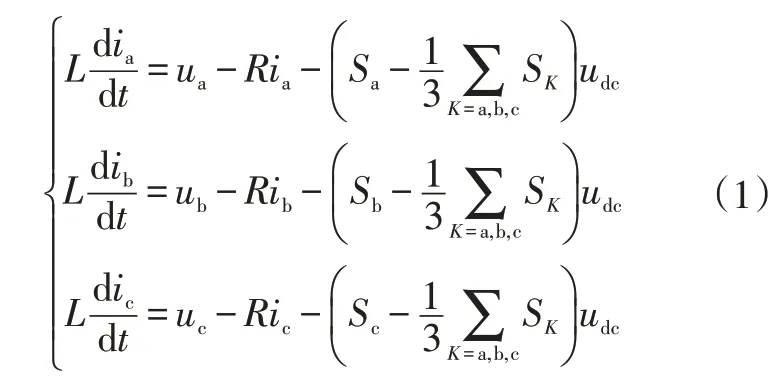
式中,S(=a,b,c)為各相上、下橋臂的導通狀態,S=1 為上橋臂導通,S=0為下橋臂導通。
將式(1)簡化,再經派克(Park)、克拉克(Clark)變換后得到其在同步旋轉坐標系下的數學模型為:
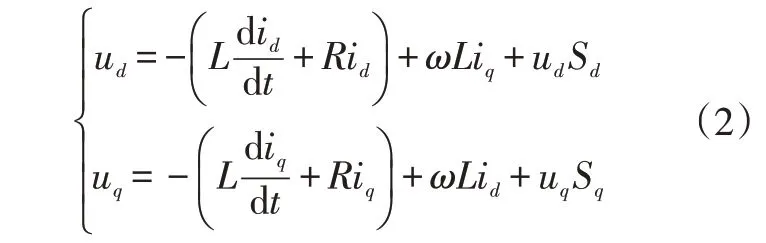
式中,為坐標系的旋轉角頻率;u、u、i、i分別為電壓矢量、電流矢量在、軸上的分量;S、S分別為導通狀態在、軸上的分量。
在u和u中存在、分量互相耦合,不利于控制器的設計,故需對式(2)進行拉普拉斯變換:

式中,U、U分別為電壓外環的有功指令電壓和無功指令電壓;E()、E()、I()、I()分別為uS、uS、i、i的拉普拉斯變換結果。
對式(3)進行前饋解耦后,設在旋轉坐標系下電壓指令公式為:
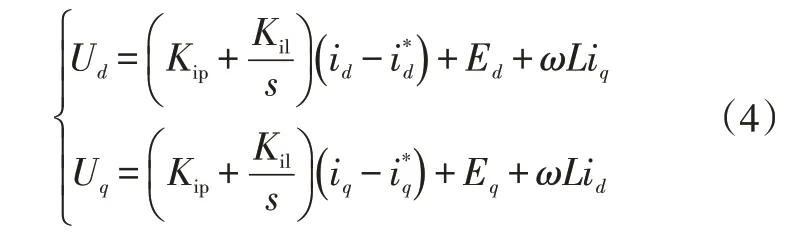

結合式(1),為了消除ωLi、ωLi、E和E的影響,簡化設計,將式(4)改寫為:
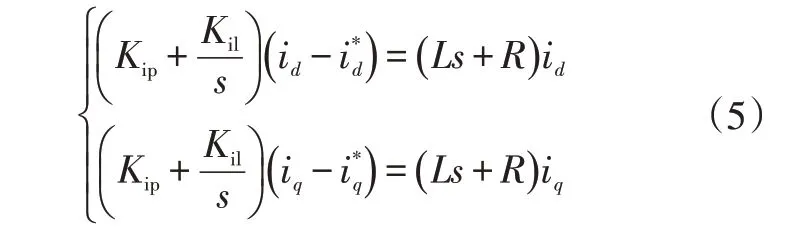
由式(5)可知,、分量已完全分解,只需確定PI調節器的和,即可實現其對電流內環的控制。
3 三相雙向變換器有源功率因數校正控制策略
3.1 矢量合成基本原則
有源功率因數校正(Active Power Factor Correction,APFC)技術是將時變的交流量通過Park、Clark 變換為、分量并使用SVPWM 算法,最終實現電能的雙向變換。由圖1,在整流模式下,網側輸入三相電壓的數學模型為:
式中,=2π為相位角初始值;為相電壓的有效值;為交流電壓頻率。
則三相電壓合成空間矢量()的表達式為:

由式(7)可知,()是旋轉的空間矢量,幅值為相電壓的1.5 倍,并按逆時針方向以角頻率=2π勻速轉動。根據電路上、下橋臂的導通狀態可形成8 種組合,即6 個非零矢量和2 個零矢量,由式(7)可得到8個基本矢量的幅值及其所在矢量平面內的相位,如圖2 所示。
由圖2可知,系統被劃分為6個扇區,每個扇區內的合成矢量都可由~合成。
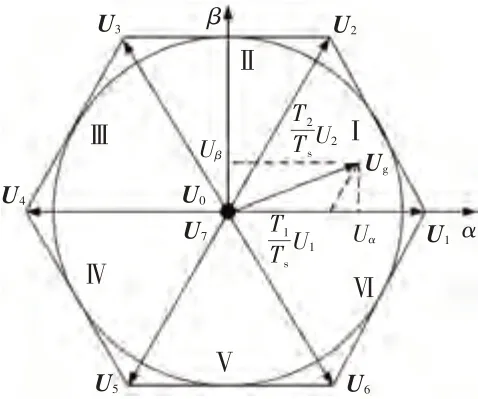
圖2 空間電壓矢量分布及合成
3.2 矢量作用時間
以第1扇區為例,電壓空間矢量的合成與分解如圖3所示,由圖3推導可知:
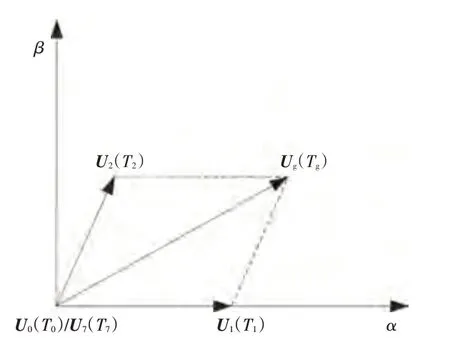
圖3 電壓空間矢量在第1扇區的合成與分解
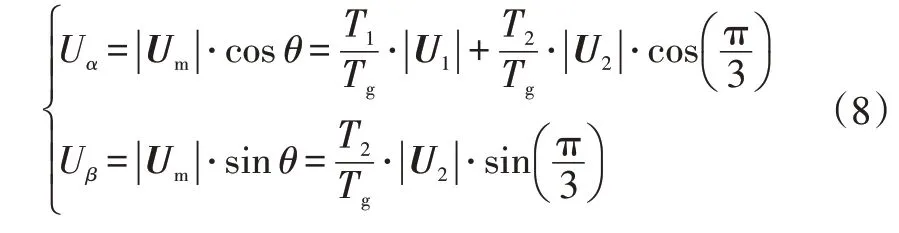
式中,U和U分別為相電壓的模在兩相靜止坐標系軸和軸上的投影;、分別為相鄰作用矢量、的作用時間;為合成矢量的作用時間。
將式(8)簡化后得到扇區內矢量的作用時間為:
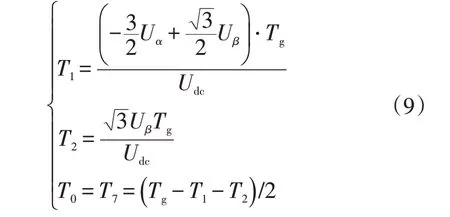
通過以上推導可知,開關管存在同時導通和關斷的情況,經過分析,只需通過調整驅動程序即可解決,不需要額外加死區時間避免直通。上述矢量合成的方法同樣適用于逆變模式。
4 PI控制器參數設置
圖4 所示為整流模式下矢量控制系統結構。在旋轉坐標系下,由式(2)可知,U與U之間存在相互耦合,所以應采取前饋解耦控制,并采用PI 調節器進行調節,從而實現軸與軸的獨立控制,提高系統動態性能。
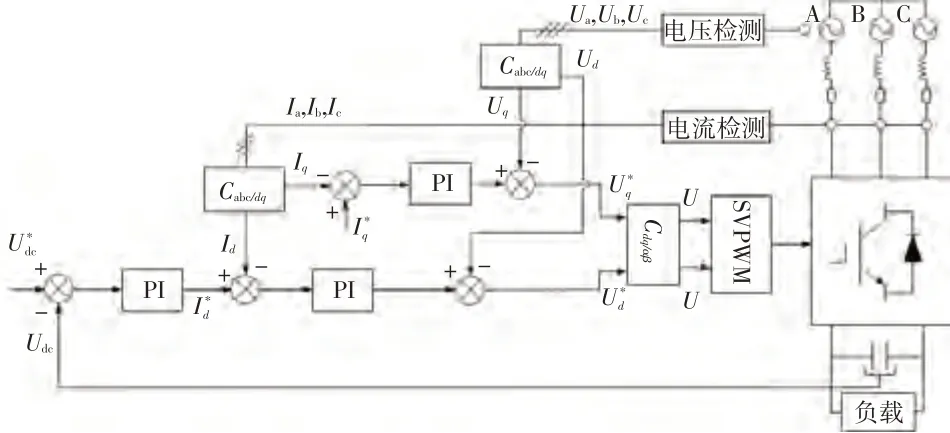
圖4 矢量控制結構
前饋解耦后由式(5)分析可得,在實際分析中,還需考慮電流采樣延時和變換器本身的時間常數等影響,電流內環結構如圖5所示,其中為PWM波形的增益。

圖5 電流內環結構
按Ⅰ型系統設計,盡量使PI 調節器的零點與電流控制傳遞函數的極點相消,令=/τ,τ=/,同時,將圖5 中的電流采樣周期合并,并考慮阻尼比=0.707的Ⅰ型系統的二階最佳系統,經校正,結合電流環的開環傳遞函數,可確定和,其具體表達式為:
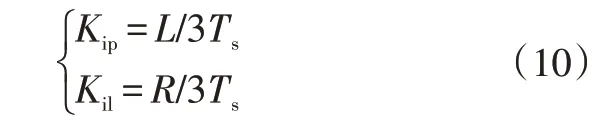
將式(10)代入其閉環傳遞函數,可得:

最后考慮開關頻率及的取值,式(11)可簡化為:

由以上分析可知,只要系統的開關頻率足夠高,電流內環即可得到快速動態響應,本文的開關頻率為10 kHz,所以響應速度已得到滿足。
在整流模式下,開關管的通斷頻率遠大于網側電動勢基波頻率,故可以忽略PWM諧波分量,只考慮開關函數的低頻分量,因此開關的函數表達式為:
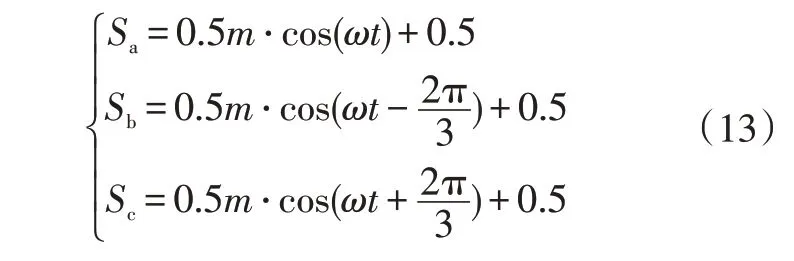
式中,為PWM調制比。
整流模式下系統交流側的電流為:
式中,為相電流的有效值,則對應直流側輸出為:

將式(13)和式(14)代入式(15),經簡化可得:

則其電壓外環控制結構如圖6 所示。電壓外環PI控制器的主要作用是穩定直流側的輸出電壓,故從抗干擾角度出發,選用Ⅱ型系統,由圖6 可得電壓環的開環傳遞函數()為:

圖6 電壓環控制結構

式中,為系統電壓環的位置誤差系數;為系統電壓環的指數系數;為系統電壓環隨機選取的周期。
在圖6 中,i為電感電流。又由電壓外環頻寬=/,根據工程設計方法中Ⅱ型系統參數計算公式可得:
在實際工程應用中,系統的抗干擾和系統跟隨性都會綜合考慮電壓外環頻寬=5,將其代入式(18),可得電壓外環PI調節器的比例和積分系數分別為:

式中,為系統電壓環的靜態速度誤差系數;為系統電壓環PI 調節時間;為系統電壓環總的作用時間。
經上述分析確定了電流電壓外環PI 控制參數,減少了試驗中參數選擇的盲目性,但在實際應用中,由于設備參數不統一,還需根據實際情況進行微調,以求得最優參數取值。經過驗證,整流模式下PI 控制器參數的確定方法同樣適用于逆變模式。
5 仿真與結果
本文針對三相AC/DC 雙向變換電路,采用前饋解耦的雙閉環控制策略和SVPWM 的調制策略來控制功率開關管通斷,利用MATLAB/Simulink仿真軟件平臺搭建仿真模型,如圖7所示。
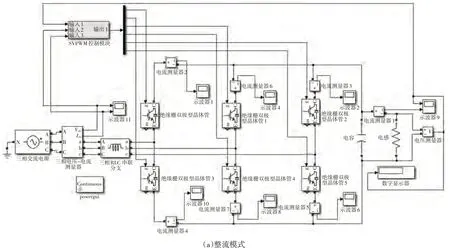
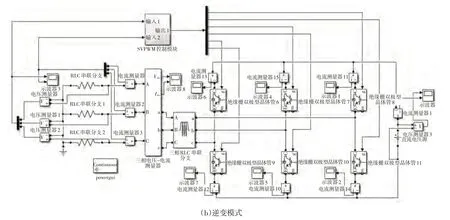
圖7 系統在不同模式下的仿真模型
仿真參數設置為:交流側相電壓=220 V,頻率=50 Hz,直流側輸出電壓=400 V,輸出功率=4 kW,開關頻率=10 kHz,交流測電感=3.3 mH,電路等效電阻0.05 Ω,直流側濾波電容=1 200 μF。仿真波形如圖8 所示。
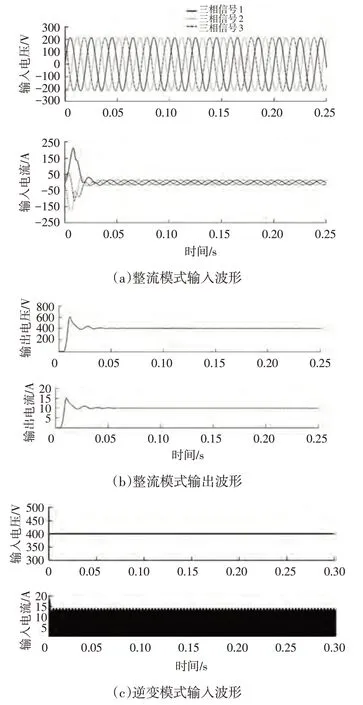
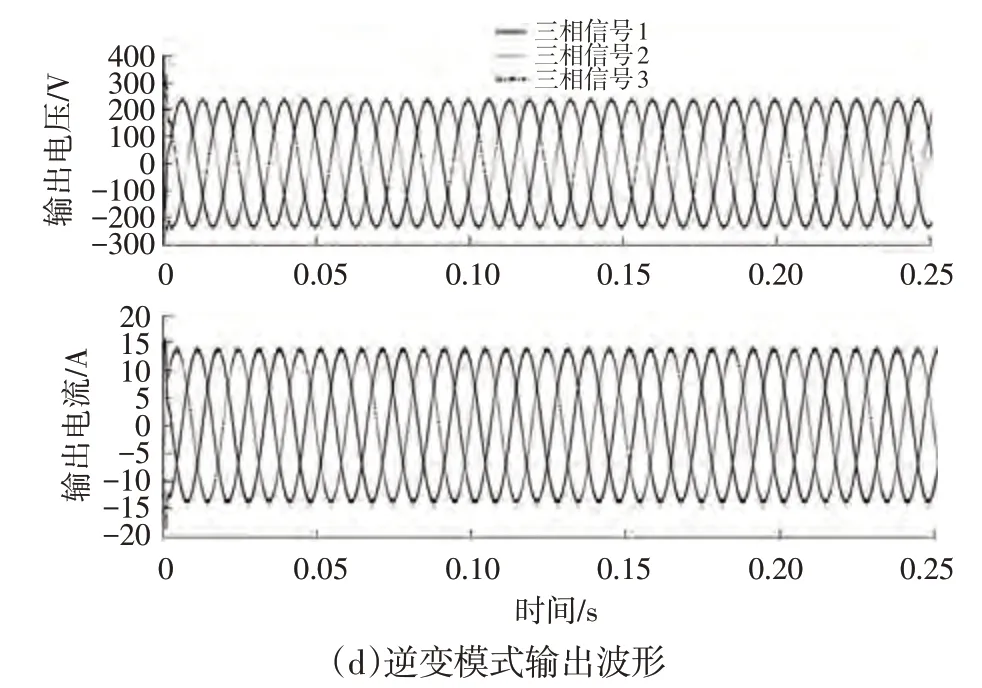
圖8 系統在不同模式下的仿真波形
由圖8a可知,系統起振初期,因直流側接了較大的濾波電容,輸入電流呈現出較大的電流過充。持續約0.02 s后,輸入電壓與電流保持同相位,實現系統在整流模式下在單位功率因數狀態運行。由圖8b 可以看出,外環電壓經過PI調節器能夠敏銳地追蹤外觀指令電壓(400 V),調解時間約為0.02s,實現輸出電壓的穩定追蹤,且輸出的電壓和電流可根據電池的充電需求隨時調整。由圖8d可知,電流呈正弦波且與電壓同相位,符合相關并網技術標準。
圖9 所示為整流模式下交流側的諧波分析結果,在整流模式下交流側的總諧波失真(Total Harmonic Distortion,THD)為0.87%,遠小于5%,電能質量所受干擾明顯減小。圖10所示為逆變模式下交流側的諧波分析結果,逆變模式下的總諧波失真為3.12%,可以看出,變換器的電流諧波含量低,實現了變換器高功率因數運行。對比文獻[3]和文獻[5],該拓撲結構的總諧波失真明顯降低。
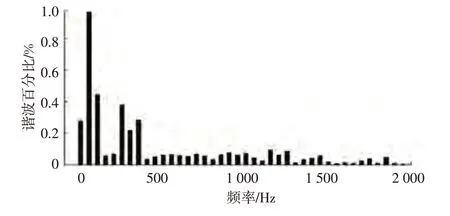
圖9 整流模式下交流側的諧波分析
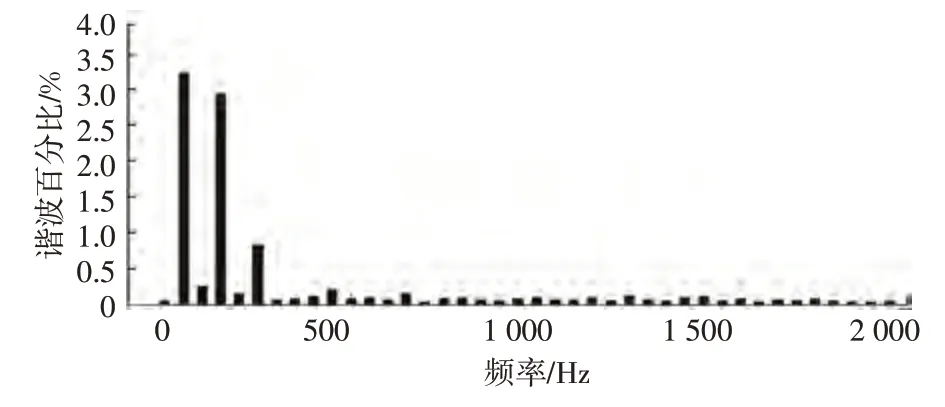
圖10 逆變模式下交流側的諧波分析
對試驗樣機進行相應試驗,圖11所示為原理樣機,圖12所示為上電后功率開關管的驅動信號。

圖11 試驗原理樣機
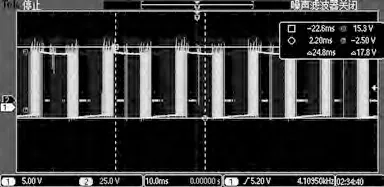
圖12 功率開關管的驅動信號
系統在整流模式下的輸入、輸出波形如圖13 和圖14所示。
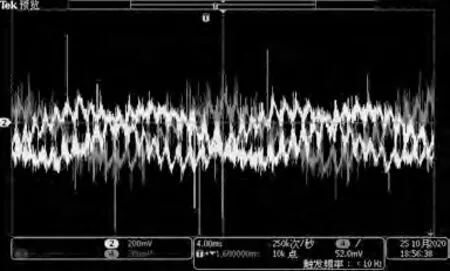
圖13 輸入三相電壓波形

圖14 輸出電壓值
系統在逆變模式下的輸入、輸出波形如圖15 和圖16所示。

圖15 輸入電壓值
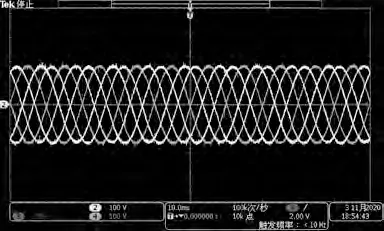
圖16 輸出電壓波形
系統的功率如圖17 所示,通過對比圖15 得出系統的傳輸效率為96.44%,對比文獻[3]和文獻[5],效率均有所提升。
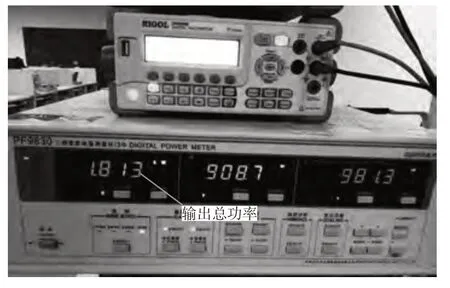
圖17 輸出功率
6 結束語
本文提出了一種三相AC/DC 雙向變換器拓撲結構,并提出了相應的SVPWM 調控策略,通過引入有源功率因數校正技術,使得系統能夠在單位功率因數下運行,并減少了電網諧波,能夠實現能量的雙向流動。經分析,變換器無直通問題,可以不外加死區,直流側電壓可調,減少了變換器對于電能質量的影響,并通過MATLAB/Simulink 仿真平臺驗證了該方案的可行性及優勢,最后利用原理樣機進行試驗,結果表明,系統可實現電能的雙向變換、高功率因數運行,并進一步提高了電能的傳輸效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
通信電源技術(2018年3期)2018-06-26 06:34:18
人大建設(2018年2期)2018-04-18 12:17:00
