
基于可重構電路的鋰電池組充電均衡研究*
2022-06-24 03:35:24于仲安熊瑩燕
汽車技術 2022年6期
于仲安 熊瑩燕
(江西理工大學,贛州 341000)
主題詞:鋰電池 可重構均衡電路 Buck-Boost電路 均衡速度 能量轉移效率
1 前言
鋰電池因其自放電率低、放電電壓平緩和對環境友好而被廣泛應用于新能源汽車。多節鋰電池串聯使用時,由于電池間電化學特性存在差異,加之溫度、電流等因素的影響,在電池組充電時,電池間容量、荷電狀態(State of Charge,SOC)差異會逐漸增大,進而使串聯電池組的容量不能充分使用,故需對串聯電池組進行均衡處理。
電池主動均衡利用電感、電容以及開關電路控制電荷在電池之間轉移。文獻[9]采用Buck-Boost 相鄰均衡控制電荷在電池之間轉移,改善了電池SOC的不一致性,但是電荷只能在相鄰電池間轉移,需要多次轉移才能使電池組達到均衡。文獻[10]對傳統Buck-Boost 均衡進行改進,使得能量可以在非相鄰電池單體間傳遞,同時簡化了電路,提高了均衡速度和能量轉移效率。文獻[11]通過對電池組采用先串后并的排列方式,分3個層次用Buck-Boost 電路對電池組進行逐層均衡,極大地改善了電池SOC 的不一致狀態。但是文獻[10]和文獻[11]中的電荷在電池之間傳輸存在損耗,且損耗大小與電荷傳輸次數正相關。針對此問題,文獻[12]利用可重構電路,通過開關控制電池接入或者隔離出電池組,改變電池單體的充放電時間,從而間接實現電池均衡,但是可重構電路均衡速度緩慢,并且只能在電池組工作時進行均衡。
為了縮短均衡時間,同時減少能量損耗,本文在開關電感的Buck-Boost電路基礎上,結合可重構電路設計可重構Buck-Boost 均衡電路,并針對不同的電池SOC分布情況制定相應的均衡策略,使其充分利用均衡電路結構,同時基于MATLAB/Simulink搭建仿真模型對該均衡拓撲和均衡策略的均衡性能進行測試。
2 電路均衡拓撲及控制策略
2.1 開關電感的Buck-Boost均衡電路
開關電感的Buck-Boost 均衡電路是在傳統Buck-Boost 電路基礎上改進得到的,不僅可以實現相鄰電池之間的均衡,也可以實現非相鄰任意電池之間的均衡,其電路結構如圖1a 所示,它利用電感的儲能作用將電能轉化為磁能存儲,實現電荷的轉移。圖1a 將串聯電池組分為層:第1層中電池兩兩一組進行組內均衡,均衡完成后,在第2層將均衡后的2個電池視為整體,再次兩兩分組,進行組內均衡,若當前層電池組不能剛好湊成兩兩一組,則落單組不參與本層均衡,而在下一層參與均衡。同一層的2個相鄰組為一個均衡子電路。

圖1 開關電感的Buck-Boost電路
均衡子電路工作原理如圖1b 所示,電池模塊可以是電池單體,也可以是連續的電池串。以電池模塊1向電池模塊2轉移能量為例,其工作過程分為2個階段:開關K、K和金氧半場效晶體管(MOS管)Q導通時,電流如圖1b 中回路1 所示,此時電池模塊1 向電感充電;MOS 管Q關斷,開關K、K導通時,電流通過二極管D續流,回路如圖1b中回路2所示,此時電感向電池模塊2 充電。如此往復,通過控制開關的通斷,可實現電池模塊1和電池模塊2之間的均衡。均衡電路按照層次依次進行電池均衡,最終實現電池組的整體均衡。
2.2 可重構電路
可重構電路通過將電池接入或者隔離出電路的方式控制各電池的充放電時間,從而實現電池均衡,以4節串聯電池為例,電路結構如圖2所示。

圖2 可重構電路結構
假設4 節電池按SOC 由高到低依次編號為B、B、B、B,其充電均衡流程如圖3 所示。改變B、B和B的連接狀態,開關K、K、K斷開,開關K、K、K閉合,如圖3a 所示,此時B、B和B暫時被隔離出電路,B充電,直至B與B的荷電狀態相同時,B重新接入電池組,如圖3b 所示,而電池B和B仍處于被隔離狀態。直至B、B、B的荷電狀態相同時,B接入電池組,B被隔離,如圖3c所示。最后,B~B的荷電狀態相同時,B重新接入電池組。此時,電池組內所有電池荷電狀態一致,所有電池同時充電。
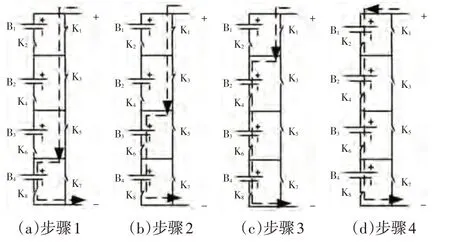
圖3 可重構電路充電均衡流程
由于可重構均衡電路是通過控制電池的充電時間實現電池均衡的,不存在電池之間的能量轉移,所以幾乎沒有能量損耗,這也是傳統的主動均衡難以實現的目標。
2.3 可重構Buck-Boost均衡電路
為了在保證電池均衡速度的前提下,盡量縮短電荷轉移的路徑,減少能量損失,通過結合開關電感的Buck-Boost 均衡電路與可重構均衡電路,設計可重構Buck-Boost 均衡電路,結構如圖4 所示,該電路在開關電感的Buck-Boost均衡電路的基礎上,通過在每個電池后串聯繼電器開關,使其在保持原有功能的基礎上,電池可以被隔離出電路。

圖4 可重構Buck-Boost均衡電路
2.4 可重構Buck-Boost充電均衡控制策略
均衡變量是表征電池不一致性的關鍵,可以選擇采用電壓或者SOC,由于電壓均衡容易受到內阻不一致的影響而導致過均衡,所以本文選擇電池SOC作為均衡變量。
為了更好地發揮可重構電路與Buck-Boost電路各自的優勢,需要在不同的SOC分布情況下采用對應的均衡策略。假設電池組由個電池單體串聯而成,存在5種工況。
2.4.1 工況1
分別用、表示電池組中單體最高、最低荷電狀態。當電池組兩端中任意一端的電池單體SOC過高,而其他電池SOC 相差不大時,即=或=,且->5%,|-S|<5%,≠max時,均衡步驟如下:
a.將SOC 最高的電池隔離,其余(-1)個電池單體按照開關電感的Buck-Boost均衡電路進行均衡。
b.檢測其余(-1)個電池單體的SOC 是否一致,若一致,則繼續充電;否則返回步驟a。
c.當-<0.2%時,停止均衡。
2.4.2 工況2
||>5%,且|-S|<0.2%,=2,3,4,…,-1,=,=時:將電池組分為3組,分別是C、C、C,其中C為SOC最大的電池單體,C由SOC最小的電池單體及其相鄰的電池單體組成,C為剩余的電池組,3 組電池的SOC 為其組內單體的平均SOC,接著采取以下步驟進行均衡:
a.將C隔離,C內部通過Buck-Boost 電路進行相鄰電池間的均衡。
b.檢測C內部SOC是否一致,若一致且C的SOC與C的SOC 不相等時,電池組通過可重構電路進行均衡,否則轉到步驟d。
c.當-<0.2%時,停止均衡。
d.檢測C的SOC 是否等于C的SOC,若相等,則隔離C和C,否則返回步驟a。
2.4.3 工況3
電池組兩端的單體SOC明顯高于其余單體SOC,且兩端的電池SOC相差不大,其余電池單體的SOC 一致,即同時滿足:
a.=或=。
b.->5%。
c.||≤5%。
d.|-S|<0.2%,=2,3,4,…,-1。
此時將電池組分為3組,分別是C、C、C,其中C為電池SOC最高的電池單體,C為電池SOC最低的電池單體,C為剩余的電池組,接著通過控制開關將這3組電池隔離出或者接入電池組,從而實現C、C、C之間的均衡。
2.4.4 工況4
在電池B,B,B,…,B(為整數且3-2∈[-3,])中,任意(∈[1,])個電池單體的SOC偏高,其余電池單體相差不大,即->5%,|-|≤5%(∈[2,]且≠3-2)時,采取以下步驟進行均衡:
a.以B,B,B,…,B為節點將電池組分為組,將B,B,B,…,B隔離,其余電池單體之間通過Buck-Boost電路進行均衡。
b.檢測相互均衡電池之間SOC 是否一致,若一致,則繼續步驟c,否則返回步驟a。
c.電池組通過可重構電路進行均衡。
d.當-<0.2%時,停止均衡。
2.4.5 工況5
除上述4種工況外,其他工況按照以下步驟進行均衡:
a.按照2.1 節中的方式將串聯電池組分層,直到電池組被分為3 組或4 組,停止分層,并記錄下層級數,前層通過Buck-Boost電路進行均衡。
b.判斷第層電池的組數,若電池組被分為3組,繼續執行,若電池組被分為4組,則進入情形2。
c.設3組電池分別為C、C、C,并將3組電池按照SOC 的大小排序,若C>C且C>C,則轉到情形2,若C>C>C或C>C>C,則轉到情形1。
情形1:隔離SOC最高的一組電池,其余2組電池通過Buck-Boost進行均衡,實時檢測各組SOC,若C的SOC等于C的SOC或C的SOC等于C的SOC則轉到情形2。
情形2:當-<0.2%時,停止均衡,否則,繼續按照Buck-Boost電路進行均衡。
d.當所有電池單體的SOC一致時,停止均衡。
電池組的均衡控制流程如圖5所示。

圖5 均衡控制流程
3 對比分析
在均衡過程中,電路損耗是導致均衡電路效率低的主要因素,其中包括開關損耗、電感損耗等,并且在能量多次轉移時,能量損耗呈指數上升。能量轉移效率的計算公式為:

式中,為低能量電池達到均衡時所吸收的能量;為高能量電池達到均衡時所釋放的能量。
電池整組的能量損耗隨著電荷轉移的次數的增加呈指數上升:

本文所設計的均衡電路可以通過減少電池之間的電荷轉移次數來減少能量損耗。
表1從均衡電路的開關數量、均衡速度、能量轉移效率方面將本文設計的電路與Buck-Boost電路、開關電感的Buck-Boost 均衡電路進行了對比。與Buck-Boost 均衡電路相比較,本文拓撲的MOS管的數量更少,增加的繼電器更容易控制,能夠更好地實現物理斷路,提高電路的可靠性。與開關電感的Buck-Boost均衡電路相比較,本文拓撲可以減少電荷轉移路徑數量,有利于減少能量在傳輸過程中的損耗,提高均衡速度與能量轉移效率。

表1 不同拓撲結構對比
4 仿真與結果分析
基于MATLAB/Simulink 建立均衡電路仿真模型,將6 節鋰電池串聯連接,其中鋰電池模型為MATLAB提供的電池(Battery)模塊,標稱電壓為7.2 V,容量為5.4 mA·h,電感設置為0.1 H,脈沖寬度調制(Pulse Width Modulation,PWM)占空比設置為50%,MOS 管的內阻為10 mΩ,二極管的正向壓降為0.8 V。
4.1 不同工況下的充電均衡仿真結果
將6 節電池串聯,在不同工況下進行充電,各工況下的電池初始SOC 分布情況如表2 所示,2 種拓撲結構下均衡充電時SOC變化情況如圖6~圖10所示。

表2 不同工況下電池初始SOC分布

圖6 工況1下均衡充電SOC變化情況

圖7 工況2下均衡充電SOC變化情況

圖8 工況3下均衡充電SOC變化情況

圖9 工況4下均衡充電SOC變化情況

圖10 工況5下均衡充電SOC變化情況
4.2 不同工況下的充電均衡仿真結果分析
由仿真結果可以得到在不同工況下2 種拓撲結構的均衡時間、能量轉移效率及充電時間,如表3所示。

表3 不同工況下的均衡充電仿真結果對比
由表3可知:本文所設計的可重構Buck-Boost電路的能量轉移效率與開關電感的Buck-Boost 電路相比明顯提高,在不同工況下平均提高了19.0%;在均衡時間上,工況1 縮短了27.1%,工況2 與原電路時間相當,工況3~工況5 分別縮短了37.1%、19.9%和43.1%,均衡速度平均提高了25.4%。
由以上仿真結果可知,本文所提出的均衡拓撲結構以及均衡策略雖然稍微延長了整組電池的充電時間,但是大幅縮短了均衡時間,提高了能量轉移效率,充分發揮了可重構電路以及開關電感的Buck-Boost 電路的優勢,能夠在保證均衡速度的基礎上,減少電荷轉移的路徑,從而減少能量損失。
5 結束語
本文針對電池組充電過程中電池SOC 不一致的問題,結合開關電感的Buck-Boost 電路和可重構電路,設計了可重構Buck-Boost電路,提出了5種工況下的均衡策略,仿真結果表明,相比于開關電感的Buck-Boost 電路,所提出的均衡拓撲和均衡策略能夠更快地實現電池均衡,并大幅提高能量轉移效率。
