仿鰩魚水陸兩棲機器人水下航行運動分析與研究
2022-06-25 14:11:11展凱利馬夢遙李海峰張詩雯韓川
科教創新與實踐 2022年9期
展凱利 馬夢遙 李海峰 張詩雯 韓川
摘要:通過對鰩魚胸鰭波動的運動模式分析,本文建立仿生鰩魚運動學模型。通過對鰩魚的表面壓力、運動速度以及各方向的受力情況進行比較,得出鰩魚產生動力的來源。然后對仿鰩魚機器人運動時推力與升力調節的分析,研究仿生鰩魚水下機器人可實現在水中的穩定航行的理論。
關鍵詞:仿鰩魚機器人;水下航行;運動分析與研究
一、鰩魚及其仿鰩魚機器人的介紹
鰩魚是一種兩棲動物[1],在游動時靠胸鰭作波狀擺動而前進。基于鰩魚的運動特性,本文設計出仿鰩魚機器人。它通過一種以波浪狀的飄帶鰭的擺動來游動。根據仿生學原理,機器人的兩側裝備有一對波浪形的飄帶,飄帶的運作方式類似鰩魚的胸鰭,通過多種運動變化來給機器人提供前進轉向的動力。這款機器人可以完美適應所有地形,水中、平地、沙地、雪地等都可以自由行動。
二、仿生鰩魚機器人結構分析
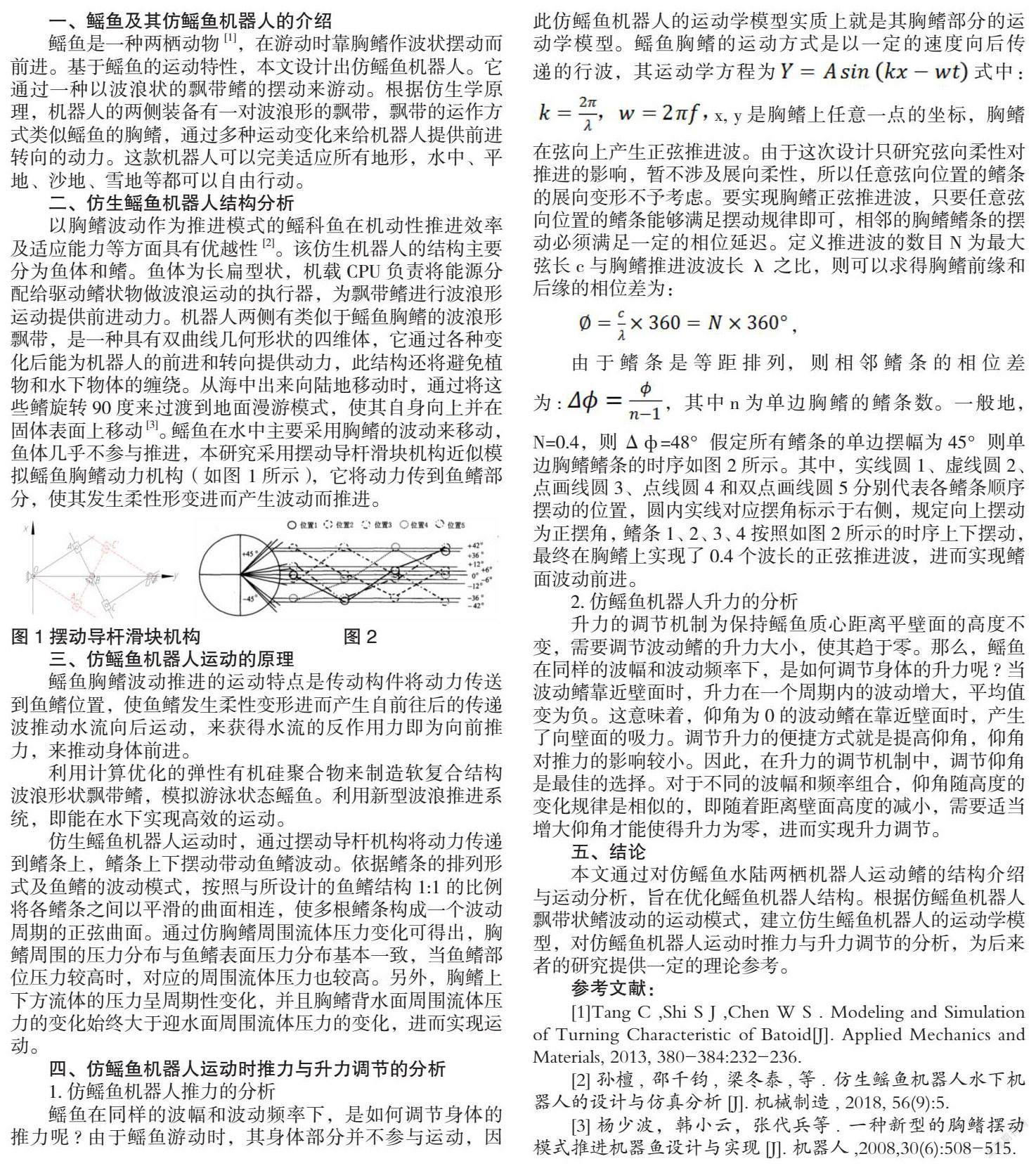
以胸鰭波動作為推進模式的鰩科魚在機動性推進效率及適應能力等方面具有優越性[2]。該仿生機器人的結構主要分為魚體和鰭。魚體為長扁型狀,機載CPU負責將能源分配給驅動鰭狀物做波浪運動的執行器,為飄帶鰭進行波浪形運動提供前進動力。機器人兩側有類似于鰩魚胸鰭的波浪形飄帶,是一種具有雙曲線幾何形狀的四維體,它通過各種變化后能為機器人的前進和轉向提供動力,此結構還將避免植物和水下物體的纏繞。從海中出來向陸地移動時,通過將這些鰭旋轉90度來過渡到地面漫游模式,使其自身向上并在固體表面上移動[3]。鰩魚在水中主要采用胸鰭的波動來移動,魚體幾乎不參與推進,本研究采用擺動導桿滑塊機構近似模擬鰩魚胸鰭動力機構(如圖 1所示),它將動力傳到魚鰭部分,使其發生柔性形變進而產生波動而推進。
三、仿鰩魚機器人運動的原理
鰩魚胸鰭波動推進的運動特點是傳動構件將動力傳送到魚鰭位置,使魚鰭發生柔性變形進而產生自前往后的傳遞波推動水流向后運動,來獲得水流的反作用力即為向前推力,來推動身體前進。
利用計算優化的彈性有機硅聚合物來制造軟復合結構波浪形狀飄帶鰭,模擬游泳狀態鰩魚。利用新型波浪推進系統,即能在水下實現高效的運動。
仿生鰩魚機器人運動時,通過擺動導桿機構將動力傳遞到鰭條上,鰭條上下擺動帶動魚鰭波動。依據鰭條的排列形式及魚鰭的波動模式,按照與所設計的魚鰭結構1:1的比例將各鰭條之間以平滑的曲面相連,使多根鰭條構成一個波動周期的正弦曲面。通過仿胸鰭周圍流體壓力變化可得出,胸鰭周圍的壓力分布與魚鰭表面壓力分布基本一致,當魚鰭部位壓力較高時,對應的周圍流體壓力也較高。另外,胸鰭上下方流體的壓力呈周期性變化,并且胸鰭背水面周圍流體壓力的變化始終大于迎水面周圍流體壓力的變化,進而實現運動。
四、仿鰩魚機器人運動時推力與升力調節的分析
1.仿鰩魚機器人推力的分析
鰩魚在同樣的波幅和波動頻率下,是如何調節身體的推力呢?由于鰩魚游動時,其身體部分并不參與運動,因此仿鰩魚機器人的運動學模型實質上就是其胸鰭部分的運動學模型。鰩魚胸鰭的運動方式是以一定的速度向后傳遞的行波,其運動學方程為式中:x, y是胸鰭上任意一點的坐標,胸鰭在弦向上產生正弦推進波。由于這次設計只研究弦向柔性對推進的影響,暫不涉及展向柔性,所以任意弦向位置的鰭條的展向變形不予考慮。要實現胸鰭正弦推進波,只要任意弦向位置的鰭條能夠滿足擺動規律即可,相鄰的胸鰭鰭條的擺動必須滿足一定的相位延遲。定義推進波的數目N為最大弦長c與胸鰭推進波波長λ之比,則可以求得胸鰭前緣和后緣的相位差為:
由于鰭條是等距排列,則相鄰鰭條的相位差為:,其中n為單邊胸鰭的鰭條數。一般地,N=0.4,則Δф=48°假定所有鰭條的單邊擺幅為45°則單邊胸鰭鰭條的時序如圖2所示。其中,實線圓1、虛線圓2、點畫線圓3、點線圓4和雙點畫線圓5分別代表各鰭條順序擺動的位置,圓內實線對應擺角標示于右側,規定向上擺動為正擺角,鰭條1、2、3、4按照如圖2所示的時序上下擺動,最終在胸鰭上實現了0.4個波長的正弦推進波,進而實現鰭面波動前進。
2.仿鰩魚機器人升力的分析
升力的調節機制為保持鰩魚質心距離平壁面的高度不變,需要調節波動鰭的升力大小,使其趨于零。那么,鰩魚在同樣的波幅和波動頻率下,是如何調節身體的升力呢?當波動鰭靠近壁面時,升力在一個周期內的波動增大,平均值變為負。這意味著,仰角為0的波動鰭在靠近壁面時,產生了向壁面的吸力。調節升力的便捷方式就是提高仰角,仰角對推力的影響較小。因此,在升力的調節機制中,調節仰角是最佳的選擇。對于不同的波幅和頻率組合,仰角隨高度的變化規律是相似的,即隨著距離壁面高度的減小,需要適當增大仰角才能使得升力為零,進而實現升力調節。
五、結論
本文通過對仿鰩魚水陸兩棲機器人運動鰭的結構介紹與運動分析,旨在優化鰩魚機器人結構。根據仿鰩魚機器人飄帶狀鰭波動的運動模式,建立仿生鰩魚機器人的運動學模型,對仿鰩魚機器人運動時推力與升力調節的分析,為后來者的研究提供一定的理論參考。
參考文獻:
[1]Tang C ,Shi S J ,Chen W S . Modeling and Simulation of Turning Characteristic of Batoid[J]. Applied Mechanics and Materials, 2013, 380-384:232-236.
[2]孫檀, 邵千鈞, 梁冬泰,等. 仿生鰩魚機器人水下機器人的設計與仿真分析[J]. 機械制造, 2018, 56(9):5.
[3]楊少波,韓小云,張代兵等. 一種新型的胸鰭擺動模式推進機器魚設計與實現[J]. 機器人,2008,30(6):508-515.
