管道除塵機器人結構設計
2022-06-26 14:10:52于家驊徐菁張亞茹邢一童趙文軒
科教創新與實踐 2022年8期
于家驊?徐菁?張亞茹?邢一童?趙文軒

摘要:管道除塵機器人,旨在制造一個更加方便、高效的管道除塵機器人,用來解決該領域內專業除塵設備的不足。為了進一步解決管道除塵機器人在管道內單一的工作問題,同時為了提高管道除塵機器人在管道內的工作效率,所以我們研發了一種新的履帶式的管道除塵機器人。基于管道除塵機器人的機械原理要求,對管道機器人的履帶式行走機構、動力驅動機構、傳動機構以及輔助機構進行設計,最后在三維建模軟件SolidWorks內對管道除塵機器人的各個零件進行建模和整體裝配,建立除塵機器人的三維模型。
關鍵詞:管道除塵機器人;履帶式行走機構
1.引言
隨著我國天然氣、空調等的廣泛應用 ,管道的運用越來越廣泛,管道由于長時間的應用,在運輸過程中,多少都會積累灰塵,而由于管道狹小,多設在地下或高處,大大的增加了清潔與維護管道的難度。目前在國內,管道除塵的方法普遍存在很多局限性,并且大多數不符合環保,并且技術性、經濟性要求,除塵效果非常不理想。而且人工在進行管道除塵、檢測時困難重重, 不僅效率非常低而且還存在著一定的安全隱患。而用管道除塵機器人在管道內進行除塵工作時還有著其他管道除塵方式不可替代的優點, 管道除塵機器人不僅可以在管道內進行除塵工作, 還可以實時地檢查除塵效果以及進行對管道的檢測、噴涂、消毒等工作。而且目前市場上國產的管道除塵機器人產品大多、太雜。技術性能比較單一, 產品倉促投放中國市場, 不利于我國國內管道除塵市場的健康發展。該管道除塵機器人采用了3個履帶行走機構,可以與管道內壁緊緊貼合。而且根據管道截面形狀使履帶360°貼合管道, 有利于增大履帶與管道壁面的附著力和摩擦力。
2.總體設計
2.1機器人工作原理
機器人在水平管道中運行時,履帶行走機構的履帶可以與管道的內壁接觸,管道內壁與履帶之間的貼合,產生的摩擦力可以為管道除塵機器人提供動力。水平管道中運行的機器人,只需要履帶與管道內壁接觸,就可以使機器人正常行走。機器人在豎直管道內運行時,要使管道除塵機器人的本體中心線與管道的中心軸線保持平行。設計管道機器人的3個履帶行走機構以360°抵在管道內壁。使履帶可以緊緊地貼合在管道內壁,防止機器人滑落,還可以為管道除塵機器人的向上運動提供足夠的摩擦力。機器人在進入管道后,3個履帶開始運動,同時位于后方的的攝像頭打開,前方的除塵機構開始轉動,進行除塵工作。
2.2總體設計思路
為了使管道除塵機器人具有全方位的運動,設計采用了模塊化的設計思想,總體結構由動力驅動機構、傳動機構、行走機構、除塵機構、輔助機構所組成。
動力驅動機構:機器人有三種驅動方式:液壓驅動、氣動驅動和電動驅動,對這三種基本方式進行分析比較,確定了管道除塵機器人的驅動方式。液壓驅動氣動驅動不僅對環境要求比較高,而且實現起來比較復雜,但電機驅動的結構相對簡單,比較容易實現密封和調速控制,所以在本設計中選用了步進電機驅動作為管道除塵機器人本體的驅動裝置。
傳動機構:傳動機構是將原動機的運動和動力進行傳遞和分配作用,是機器人非常重要的組成部分,通過分析常用的帶傳動、齒輪傳動、鏈傳動及蝸輪蝸桿傳動的特點,結合除法機器人的組成特征,確定傳動機構的構成由蝸輪蝸桿傳動、鏈傳動等組成。
行走機構:行走進機構是此機器人行走的關鍵,現有機器人的移動方式主要有蠕動爬行、彈性振動走、履帶行進、車輪式和腿足式。其中車輪式、腿足式和履帶行進3種移動方式結構相對簡單且較容易實現。車輪式的行走機構結構簡單,移動速度快,控制轉向比較方便,運動過程中能量的利用利率較高,但是著地面積小,轉彎半徑小,越障能力一般,爬坡能力弱; 腿足式自適應能力強,越障能力強,對粗糙路面吸附性能好,但移動是間歇的,運動不連貫,速度慢,結構復雜,步態難于控制。由于履帶式行進機構有支撐面積大,越障能力強,清掃時不易抖動,轉向半徑極小,可以實現原地轉向等特點。基于履帶式行進機構以上特點都較符合管道內行走要求,所以本機器人采用的是履帶行走機構。
除塵機構:管道除塵機器人是用毛刷、氣錘、氣管等機械攪動裝置將黏附在管道內壁上的灰塵剝離, 然后再利用大功率的吸塵器把灰塵吸走用來達到清理管道的目的。其中毛刷的樣式有矩形管毛刷和圓管毛刷。有的產品還采用吸塵器方式, 吸塵器形式的管道除塵機器人和生活中家用的吸塵器相似, 單單依靠空氣泵產生的負壓將灰塵吸入,需要用到一根很長的管子, 把灰塵吸到管道外面,再進行清理工作。本產品采用了毛刷除塵,使毛刷的軸線與管道除塵機器人的行進方向一致, 毛刷直徑大小與管道直徑相配。毛刷有利于快速清除灰塵,效率高。
輔助機構:管道除塵機器人在黑暗的管道環境工作, 必須要安裝必要輔助照明裝備。有一些管道除塵機器人使用的是鹵素燈進行照明, 雖然鹵素燈的優點是亮度很高, 但它也存在著使命壽命短、發熱量大等缺點。因此本產品采用的是高清攝像頭,不僅可以在黑暗中清楚的看到管內的狀況,而且沒有上述所說的缺點。
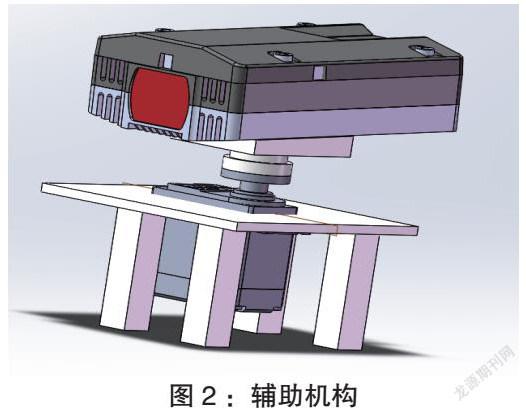
3.履帶行走構設計
與傳統的履帶行走機構不同,該履帶行走機構沒有直接與管道機器人本體相連接,而是通過履帶固定結構與本體間接相連,一方面是機器人變徑結構的一部分,另一方面是管道除塵機器人的行走機構。使得管道機器人在運動的過程中實現輕松變徑,讓機器人的變徑與行走變得更加靈活。
履帶行走機構中的履帶采用的是橡膠履帶,因為材料的原因,在管道除塵機器人的行走過程中,橡膠履帶比其他履帶有著更大的摩擦力,尤其是管道機器人行走在有些傾斜角或者豎直管道內的時侯,橡膠材料的履帶產生的摩擦效果會比其他履帶的摩擦效果更顯著。履帶行走機構與管道內壁的接觸面積更大,可以為管道除塵機器人的運動提供更大的摩擦力,提高管道機器人的行走能力。因為履帶的整體結構比較笨重,需要一定的轉彎半徑,所以在制作履帶過程中采用的是輕質材料組裝管道除塵機器人的履帶行走機構。
4.除塵機構設計
除塵模塊是管道除塵機器人完成除塵工作任務的核心,是關鍵技術研究內容,本機器人除塵采用的是毛刷清理,由3個毛刷組成,以360°分布在機器人的前側。通過除塵機構旋轉,達到清理的效果。在面對不同的管道時,可采用不同直徑的毛刷。而且當需要清掃哪一類管道時, 只需要換上符合該類管道的毛刷即可, 而不需要更換毛刷的傳動箱體, 大大方便了操作。
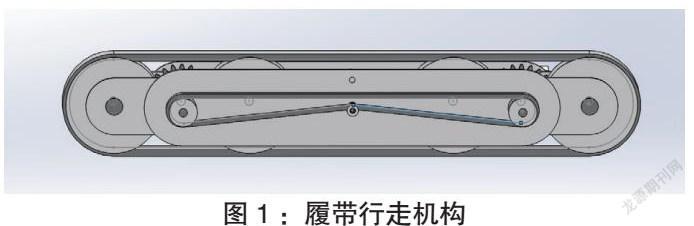
5.輔助機構設計
由于管道的長期使用,會有一些污垢的沉積,而且管道的直徑比較小,使得管道能見度較差,甚至根本就看不見管道內的情況,很容易會產生一些不必要的麻煩。為此必須給管道機器人配備照明和視頻采集裝備,采集到的視頻圖像通過通訊線傳回地面監視系統,以便于地面人員實時對管道情況進行觀察、分析,從而預防意外事件的發生。本產品機器人裝有小型照明攝像頭,小型攝像頭裝在機器人后方,可以更好的觀測管道內的情況,方便工作人員從地面上對管道情況進行觀察、分析。視頻采集攝像頭用來采集管道污垢的堆積與除塵后的情況,和機器人的前進路徑和周邊環境,據此地面工作人員可以更好地對管道環境進行周詳的分析,從而更好更快地進行除塵維護工作。
6.管道機器人的整體裝配
我們在對于新型的管道除塵機器人的設計過程中,采用的是以本體為中心向周圍擴散的裝配方法,首先要對管道除塵機器人的各種機械零件和裝配結構進行分析。用SolidWorks三維建模軟件完成對管道除塵機器人的全部零件的設計和建模,并且通過對管道除塵機器人的各個零件進行了合理的配合,然后組裝成了整體機器人的裝配體。如圖所示:
7.結論
該管道除塵機器人可以應用在各種復雜的管道內,還可以更加高效的完成管道內的除塵的工作,本文采用履帶式結構,增大了與管道內壁的接觸面積,提高了摩擦力,而且還提高了驅動能力和負載能力,可以牢牢的抓住管道內壁。該機器人采用了三維建模軟件Solid Works對機器人的各個零件進行設計、建模和裝配,直觀地體現出變徑管道機器人的整體情況。在管道內具有更好的實用性。
參考文獻:
[1]毛立民. 通風除塵管道清洗機器人的開發. 東華大學機械工程學院,2005-12-30.
[2]常生,劉玉良,王忠超. 新型變徑管道機器人的設計. 浙江海洋大學,2021-11-10.
[3]劉勇. 可變徑管道機器人結構及控制系統設計. 上海理工大學,2022-02-24.
基金項目:2021年山東省大學生創新訓練項目(S202113320092);
2020年青島黃海學院科技創新活動項目;
2021年國家大學生創新創業訓練計劃項目.
