汽車起重機伸縮臂滑塊對局部應力的影響分析
2022-06-29 01:47:26郭二棒高順德徐金帥孫豐科奚傳峰
起重運輸機械 2022年11期
關鍵詞:有限元
郭二棒 高順德 徐金帥 孫豐科 奚傳峰
大連理工大學 大連 116025
0 引言
汽車起重機以其占地面積小、作業幅度大、靈活性強的特點廣泛應用于基礎工程建設中。汽車起重機的起重臂由多節伸縮臂套接而成,滑塊是實現伸縮臂間傳遞載荷的重要部件。滑塊的接觸區域受力復雜,若其參數設計不合理,隨著起重性能的提升和作業高度的增大會出現明顯的應力集中,對伸縮臂滑塊接觸區域的局部穩定性造成影響。因此,有必要研究滑塊的尺寸和材料參數對伸縮臂局部應力的影響,對提高臂架承載能力及穩定性也有非常重要的意義。
接觸應力計算方法主要有經典接觸力學和非經典接觸力學[1],目前非經典接觸力學在實際應用中更廣泛。對于伸縮臂滑塊接觸問題,很多研究人員做了大量的研究。紀愛敏等[2]通過耦合伸縮臂和滑塊間的節點自由度模擬伸縮臂與滑塊的搭接作用以獲取伸縮臂的應力分布,但這種處理方法改變了接觸面之間的接觸關系,不能準確反映結構中的接觸特性;李志敏[3]分別采用尼龍滑塊和青銅滑塊進行計算,分析了滑塊支撐位置對應力分布的影響,并得出最佳的支承位置;韓立[4]分析了Ansys中不同接觸參數設置對U形截面伸縮臂下滑塊接觸區應力的影響,并進行了公式擬合,但上滑塊在實際情況下的局部應力情況比下滑塊更復雜;楊山林[5]利用顯示動力學軟件LS-Dyna對U形截面伸縮臂和滑塊進行顯示接觸分析,對伸縮臂滑塊接觸區最大應力進行優化,但更多是研究接觸參數設置對局部應力的影響;胡青春等[6]分析了箱形伸縮臂與滑塊接觸區域的滑塊接觸應力,總結出滑塊不同參數對伸縮臂局部穩定性影響力大小的敏感性,但未說明滑塊具體參數的影響趨勢。
上述文獻都只是在單工況前提下進行研究,并未給出多個工況情況下滑塊參數對伸縮臂局部應力的影響是否一致。為此,本文以55 t汽車起重機U形截面伸縮臂為研究對象,借助有限元分析軟件Ansys,采用參數化建模的方法建立伸縮臂及滑塊有限元模型,分析滑塊長度尺寸及滑塊剛度對伸縮臂接觸區域應力的影響規律,并研究滑塊在各工況下的變化規律,為滑塊和臂節優化設計提供理論依據。
1 伸縮臂結構
汽車起重機主要由主臂、副臂、專用底盤、轉臺、駕駛艙等組成,本文研究的汽車起重機最大額定起重量為55 t,整體結構如圖1所示。
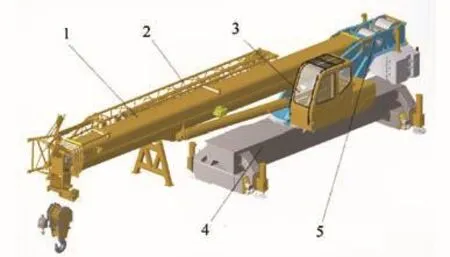
圖1 汽車起重機整機結構
該汽車起重機的伸縮臂由5節臂組成,臂節采用U形截面,如圖2所示。伸縮臂節間通過滑塊傳遞載荷,其中臂頭處滑塊包括上滑塊和下滑塊,臂尾處滑塊包括上滑塊、下滑塊和側滑塊。考慮到臂節與滑塊間載荷關系傳遞的相似性特點,同時考慮非線性計算的時間成本,本文選擇基本臂和一節臂進行建模分析。臂架截面幾何參數尺寸如表1所示。
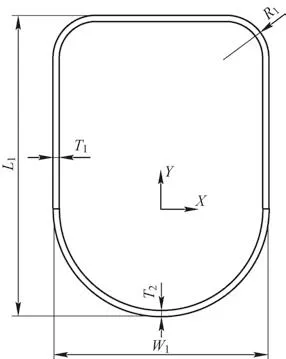
圖2 臂架截面圖

表1 伸縮臂尺寸 mm
2 有限元模型
2.1 模型簡化
接觸分析是一種高度非線性分析,網格劃分的質量影響計算的收斂性。為了節省計算機運算量,提高運算效率和網格劃分的質量,應對伸縮臂模型作簡化和等效處理。在保證等剛度的情況下,本文在建立滑塊接觸模型時進行以下簡化:
1)忽略伸縮臂上對整體結構強度影響較小的局部細節,如銷孔、螺絲孔、固定副臂支架等;
2)由于本文研究重點是滑塊的接觸應力,故不考慮伸縮臂由鋼板焊接時的焊縫;
3)省略臂架變幅液壓缸鉸點和一節臂底部和轉臺連接的加強筋,可減小收斂難度;
4)伸縮臂主要通過臂節之間的繩排和液壓缸實現軸向載荷的傳遞,本文在基本臂和一節臂間的液壓缸用梁單元模擬。
為了提高計算效率,本文使用APDL參數化建立臂節和滑塊的有限元模型。伸縮臂整體有限元模型如圖3所示。
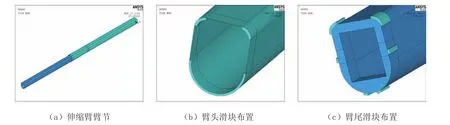
圖3 伸縮臂模型
2.2 網格劃分
1)定義單元
伸縮臂主要由臂節和滑塊組成,本文主要采用的單元類型有Shell 181、Solid 45、Beam 188、Conta 174、Targe 170等。由于臂節由鋼板焊接而成,所以本文采取Shell 181單元,滑塊則采用Solid 45單元模擬,基本臂與一節臂間的液壓缸采用Beam 188模擬。
滑塊與臂節間的接觸采用Conta 174和Targe 170單元模擬,其中Conta 174單元用于模擬接觸面,Targe 170單元用于模擬目標面。根據Ansys中對單元的定義,本文將臂節設置為目標面,而滑塊設置為接觸面。
2)材料選取
Ansys中提供了大量材料模型用于模擬各種材料,用戶可以自定義材料屬性。本文臂節采用LG960QT,滑塊材料采用尼龍滑塊。有限元模型中所有材料均是線彈性材料,其材料參數如表2所示。

表2 伸縮臂及滑塊材料
3)網格尺寸和形狀
在有限元分析中,網格劃分對計算結果有很大影響。本文研究的伸縮臂模型采用四邊形網格,滑塊采用六面體網格。對于伸縮臂部分,在滑塊處劃分網格大小為10 mm,其他部分網格大小為50 mm,而滑塊的網格大小設置為10 mm。劃分網格后的模型如圖4所示,該模型共有82 620個單元和80 106個節點。
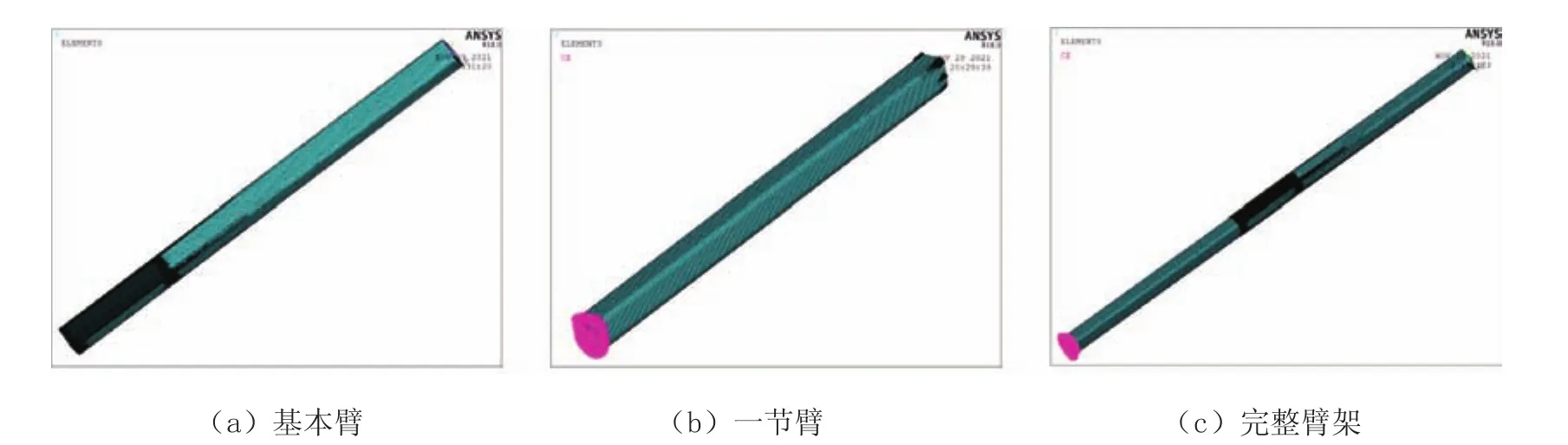
圖4 伸縮臂有限元模型
2.3 邊界條件和載荷
起重機伸縮臂的載荷一般分為常規載荷、偶然載荷、特殊載荷和其他載荷等。為了便于研究滑塊在接觸區應力在載荷下的變化規律,在此只考慮考慮吊重、伸縮臂自重等常規載荷,不考慮側載荷。伸縮臂自重采用加重力加速度的方法。在二節臂臂頭建立剛性區域,將吊重加載剛性區域節點上。
該汽車起重機的伸縮臂與轉臺通過銷軸鉸接,伸縮臂有變幅平面內的轉動自由度,限制Ux、Uy、Uz、Roty、Rotz自由度;對于伸縮臂與變幅液壓缸鉸點,由于變幅液壓缸起支撐作用,故限制Ux、Uy、Uz自由度。對于一節臂與二節臂是依靠液壓缸傳遞軸向載荷,故建立Beam單元對液壓缸進行模擬。
2.4 接觸單元定義
在Ansys中有點-點接觸、點-面接觸、面-面接觸3種接觸類型,不同的接觸問題需要選用不同的接觸類型,伸縮臂與滑塊之間的接觸屬于面面接觸。本文選擇伸縮臂為目標面,用Targe 170單元模擬;選擇滑塊為接觸面,用Conta 174單元模擬。
在建立接觸單元后,應檢查接觸面和目標面的外法線方向是否相對。若目標面和接觸面不相對,在開始計算時程序會認為出現過度侵入,很難找到初始解。一般情況下,程序會立即停止運行;法線方向可使用/Psymb命令顯示單元坐標系進行檢查;若目標面和接觸面外法線方向不相對,可使用Esurf命令修改法線方向。
3 滑塊長度尺寸對局部接觸應力的影響
3.1 伸縮臂滑塊區域應力分析
目前,伸縮臂分析對滑塊部位的處理一般采用自由度耦合的方式,即在滑塊處建立點對點自由度耦合。這種建模方式無法模擬出滑塊處的局部應力,本文參考該汽車起重機原始的模型,建立滑塊和伸縮臂的有限元模型。在臂節和滑塊間建立接觸單元對伸縮臂進行分析,研究接觸區域的局部應力分布。伸縮臂位移云圖和應力云圖分別如圖5和圖6所示。
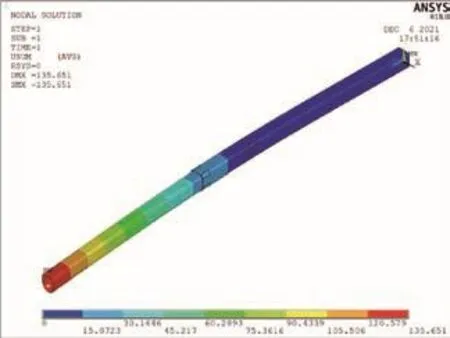
圖5 伸縮臂位移云圖
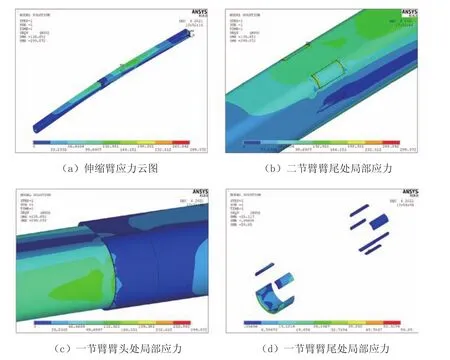
圖6 伸縮臂應力云圖
由仿真結果可知,伸縮臂最大位移發生在一節臂的臂頭;伸縮臂應力集中出現在滑塊與伸縮臂的接觸區,而其他區域應力比較均勻,應力的最大點出現在基本臂與一節臂的滑塊接觸處。一節臂與基本臂臂頭的滑塊接觸區應力分布比較均勻,而滑塊上應力分布不均勻,滑塊最大應力出現在一節臂的滑塊上。
3.2 滑塊長度對局部應力的影響
選擇伸縮臂的4個典型工況研究滑塊長度對局部應力的影響,各工況數據如表3所示。在每個工況下,滑塊的長度取值范圍為100~400 mm,且每隔10 mm取一滑塊長度值進行分析,提取臂架的最大應力和最大位移、滑塊的最大應力、最大接觸應力,仿真結果見圖7。
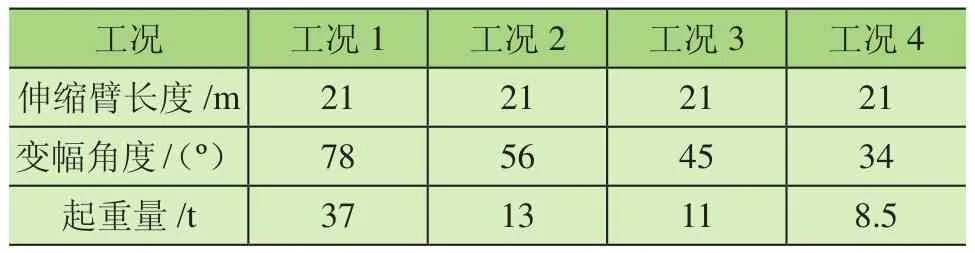
表3 典型工況數據
由圖7a可知,隨著滑塊長度的增大,伸縮臂最大應力逐漸減小。當滑塊長度為100~280 mm時,伸縮臂最大應力下降幅度在4種工況下最大可達16.7%;當280~400 mm時,伸縮臂最大應力下降幅度不明顯,在4種工況下最大為0.5%。
由圖7b可知,隨著滑塊長度的增大,滑塊的應力先減后增,滑塊應力在滑塊長度為320 mm時最小。不同工況下滑塊應力也有不同程度的減小,其中工況1的應力下降幅度最大,達到26%;
由圖7c可知,隨著滑塊長度的增大,接觸應力逐漸減少。當滑塊長度為100~280 mm時,滑塊應力減小明顯;當長度為280~400 mm時,應力基本不變。在這4種工況中,工況1的接觸應力變化幅度最大,減小了36%;
由圖7d可知,伸縮臂的最大位移隨滑塊長度的增加而減少,但減小程度非常小。在4種工況中,工況1的伸縮臂最大位移變化幅度最大,但僅減少了1.2%。
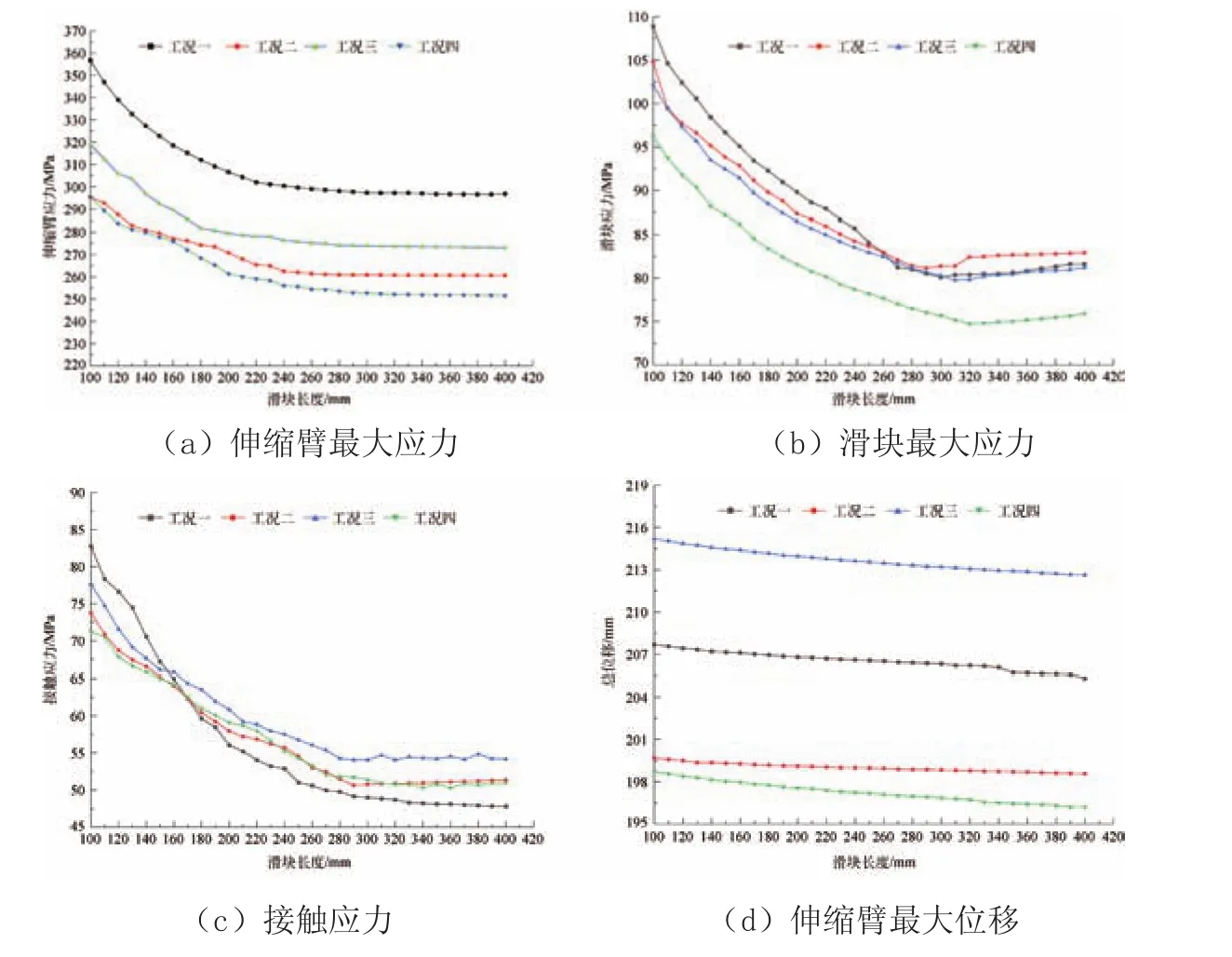
圖7 滑塊長度對伸縮臂的影響
綜上所述,3種應力的變化趨勢在4種工況下變化的位置基本相同。
4 滑塊材料對局部接觸應力的影響
將材料的彈性模量變化范圍設為5 000~110 000 MPa,每隔10 000 MPa取一個值,同時在上述4個工況下進行接觸計算。分析結果如圖8所示。
由圖8可知,隨著滑塊彈性模量的增大,4種工況下的滑塊應力、伸縮臂臂節應力、接觸應力都逐漸增大,然而隨著彈性模量的增大,局部應力的增速在減小;隨著滑塊彈性模量的增大,4種工況下的伸縮臂最大位移逐漸減小,但減小幅度有限,即滑塊彈性模量對伸縮臂的位移影響很小;彈性模量對局部應力的影響趨勢在各個工況下也基本一致。
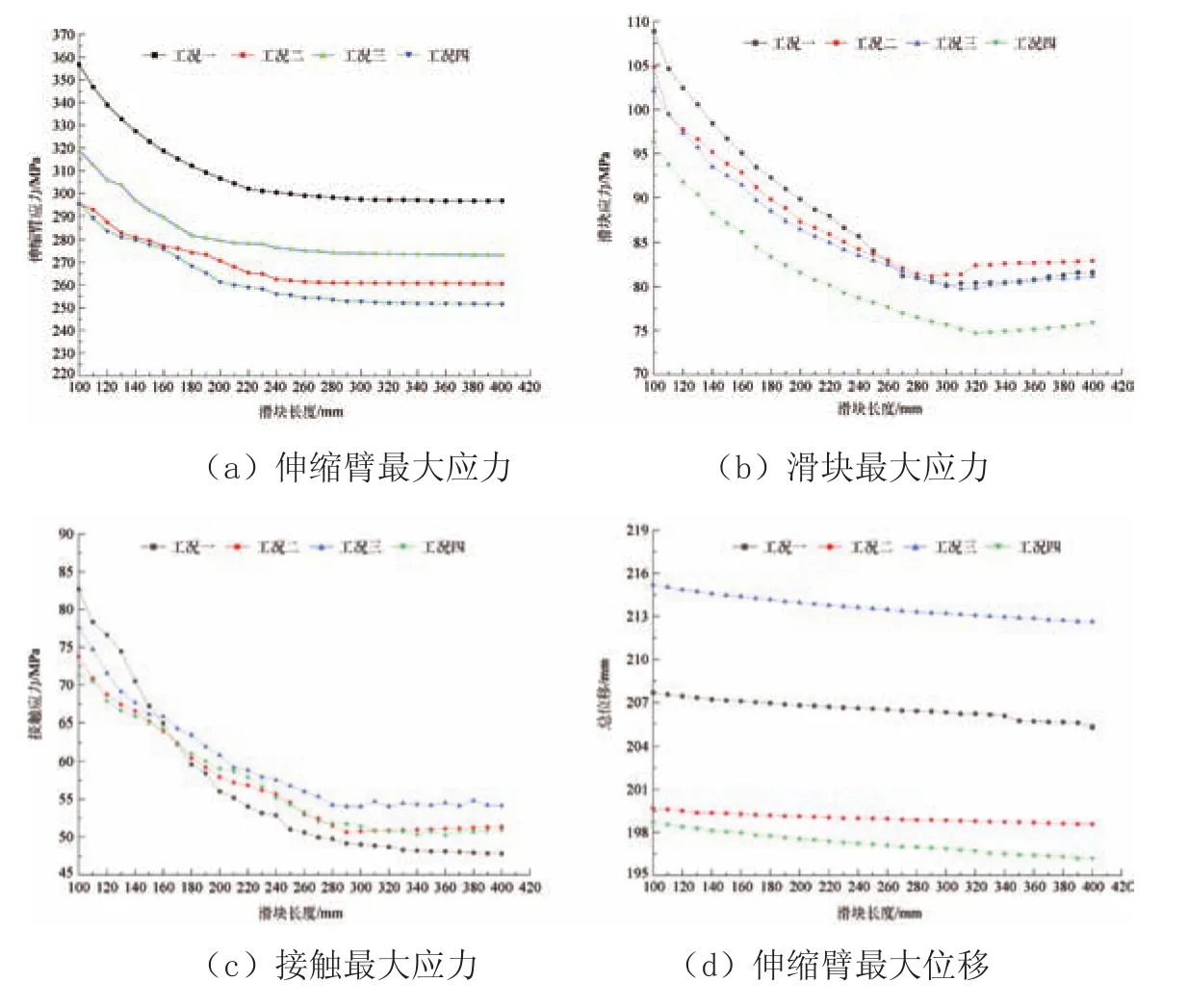
圖8 滑塊彈性模量對伸縮臂的影響
5 結論
本文通過使用Ansys對伸縮臂臂節和滑塊參數化建模,并進行接觸分析。在滑塊和臂節的接觸分析中,滑塊采用了實體建模,臂節則采用殼單元模擬,選擇單向接觸的接觸面行為建立接觸單元。選擇對多個典型工況進行分析,研究滑塊的長度和彈性模量對伸縮臂和滑塊接觸區的局部應力情況。
通過對滑塊長度對局部應力的影響分析可知,當滑塊長度在100~280 mm內增加時,伸縮臂應力、滑塊應力、接觸應力都逐漸減少;如果滑塊長度超過280 mm再增加,則對伸縮臂應力和接觸應力的影響很小,滑塊應力出現小幅度增加,故在滑塊長度設計中存在一個最優的長度值。在分析滑塊彈性模量的影響時,伸縮臂與滑塊的局部應力隨彈性模量的增大而增大。因此,在選擇滑塊材料時,應在滿足受壓承載能力的前提下選擇彈性模量較小的材料。從仿真結果可知,3種應力和位移在4個工況下的增長趨勢基本一致,后續其他臂節滑塊的設計只需研究單個工況下的趨勢即可找到最佳的長度尺寸。
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
