壓浪板對(duì)高速兩棲平臺(tái)運(yùn)動(dòng)穩(wěn)定性影響的數(shù)值分析
2022-07-05 03:41:34杜尊峰慕旭亮李志軍
中國(guó)艦船研究 2022年3期
關(guān)鍵詞:區(qū)域
杜尊峰,慕旭亮,李志軍
1 天津大學(xué) 建筑工程學(xué)院 水利工程仿真與安全國(guó)家重點(diǎn)實(shí)驗(yàn)室,天津 300354
2 鐵鷹特種車(天津)有限公司,天津 300232
0 引 言
兩棲平臺(tái)作為一種高效的水陸交通工具,能夠承擔(dān)野外偵察、物資運(yùn)輸、水上巡邏以及搶灘登陸等多種任務(wù),并開始朝著高速以及超高速的方向發(fā)展[1]。為了提高兩棲平臺(tái)的水上性能,余祖耀等[2-4]從滑板角度、車輪抬升等因素出發(fā)優(yōu)化外部型線,并考慮航行環(huán)境因素對(duì)平臺(tái)性能的影響,為其在各航行狀態(tài)下的性能提高提供了可靠依據(jù),但所針對(duì)的目標(biāo)多為中、低速排水型平臺(tái),缺乏對(duì)于高速平臺(tái)的關(guān)注。凌宏杰等[5-6]對(duì)高速滑行艇的運(yùn)動(dòng)進(jìn)行了研究,結(jié)果顯示在高速狀態(tài)下,艇體會(huì)出現(xiàn)“海豚運(yùn)動(dòng)”現(xiàn)象,并且隨著航速的增加,其升沉量、縱傾角以及響應(yīng)頻率也會(huì)隨之增大,對(duì)航行穩(wěn)定性影響較大。與高速艇相比,水陸兩棲平臺(tái)的結(jié)構(gòu)長(zhǎng)寬比更小,除卻在外形減阻方面的研究,其高速航行時(shí)的姿態(tài)及其穩(wěn)定性更加不能忽視。
壓浪板與阻流板等附體裝置作為滑行艇以及其他高性能船舶常用的增效裝置,能夠降低縱搖以及升沉幅值,可見(jiàn)適宜的安裝能夠改善船舶航行姿態(tài)[7-9]。同時(shí),也有研究表明,翼板輔助裝置能夠顯著改善中、低速階段兩棲平臺(tái)的航行性能與姿態(tài)[10]。然而,針對(duì)壓浪板的研究很少涉及高速兩棲平臺(tái),因此,有必要結(jié)合壓浪板來(lái)分析兩棲平臺(tái)在高速航行階段的水動(dòng)力特性。
近年來(lái),CFD 數(shù)值模擬技術(shù)的發(fā)展為艦船與水上平臺(tái)的性能研究提供了較好的技術(shù)支撐[11-12]。本文將以某兩棲平臺(tái)為研究對(duì)象,探討在高速航行階段壓浪板對(duì)其的影響。首先,采用CFD 數(shù)值方法對(duì)高速航行狀態(tài)下的平臺(tái)進(jìn)行模擬計(jì)算,分析壓浪板的水動(dòng)力作用機(jī)理,進(jìn)而研究其對(duì)平臺(tái)縱向運(yùn)動(dòng)姿態(tài),即動(dòng)態(tài)響應(yīng)的影響特性,然后基于計(jì)算結(jié)果和支持向量機(jī)(support vector machine,SVM)分類方法,找尋平臺(tái)在不同工況下的運(yùn)動(dòng)穩(wěn)定性邊界,為高速兩棲平臺(tái)的性能改善提供參考。
1 數(shù)值方法及驗(yàn)證
1.1 數(shù)值計(jì)算方法
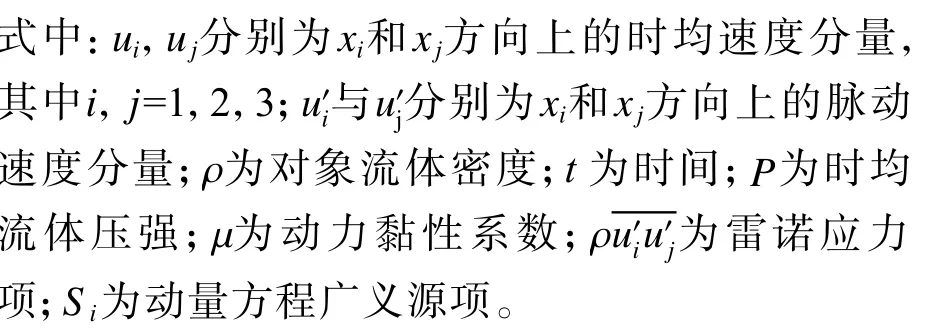
在笛卡爾坐標(biāo)系下,繞平臺(tái)流動(dòng)的不可壓縮流體所滿足的連續(xù)性與動(dòng)量守恒控制方程如下:
采用有限體積法(finite volume method,F(xiàn)VM)對(duì)流動(dòng)控制方程進(jìn)行離散,并通過(guò)網(wǎng)格劃分形成互不交叉的控制單元,整個(gè)場(chǎng)域的質(zhì)量與動(dòng)量守恒分解為每個(gè)控制單元上的有限積分[13],對(duì)流項(xiàng)使用二階迎風(fēng)插值格式,擴(kuò)散項(xiàng)的離散采用中心差分格式,并采用SIMPLE 分離式算法進(jìn)行求解。
引入剪切應(yīng)力傳輸SSTk-ω 兩方程湍流模型,以使控制方程封閉可解。該模型使用了一個(gè)混合函數(shù),在邊界層內(nèi)部采用k-ω 模型,外部使用k-ε 模型,控制方程中包含有遠(yuǎn)離壁面的交叉擴(kuò)散項(xiàng)。
使用基于歐拉多相流的流體體積(volume of fluid,VOF)法對(duì)自由液面進(jìn)行捕捉,即當(dāng)單元內(nèi)充滿液相流體時(shí),其體積分?jǐn)?shù)Cq=1,當(dāng)單元內(nèi)充滿氣相流體時(shí),Cq=0,通過(guò)計(jì)算各單元中液相流體的體積分?jǐn)?shù)來(lái)確定自由液面的近似位置[14]。其連續(xù)性方程為:
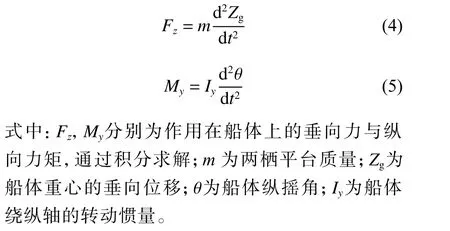
將計(jì)算區(qū)域劃分為背景域和重疊區(qū)域,其中背景區(qū)域靜止,重疊區(qū)域伴隨船體的運(yùn)動(dòng)。兩個(gè)區(qū)域的網(wǎng)格單獨(dú)生成,避免了整個(gè)流域內(nèi)的網(wǎng)格隨船體運(yùn)動(dòng)而產(chǎn)生變形,背景區(qū)域與重疊區(qū)域在交界處的網(wǎng)格尺度保持同等水平以減小數(shù)值誤差,并通過(guò)線性插值方式進(jìn)行兩套網(wǎng)格之間的信息傳遞。船體的縱向運(yùn)動(dòng)為二自由度,包含縱搖與升沉,根據(jù)質(zhì)心運(yùn)動(dòng)及繞質(zhì)心的動(dòng)量矩定理,其運(yùn)動(dòng)方程為:
1.2 數(shù)值計(jì)算驗(yàn)證
為了保證數(shù)值計(jì)算的可靠性,基于GPPH (generic prismatic planing hull)滑行艇的試驗(yàn)結(jié)果,對(duì)數(shù)值計(jì)算方法進(jìn)行了驗(yàn)證,并將計(jì)算結(jié)果與試驗(yàn)及文獻(xiàn)[15-16]中的數(shù)據(jù)進(jìn)行了對(duì)比。圖1 所示為GPPH滑行艇的型線圖,表1 所示為該艇的主尺度及相關(guān)參數(shù)。
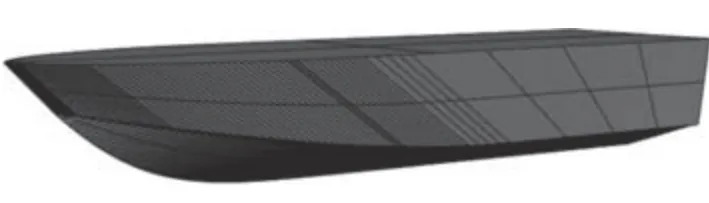
圖1 GPPH 滑行艇外形Fig. 1 Outline of GPPH planing craft
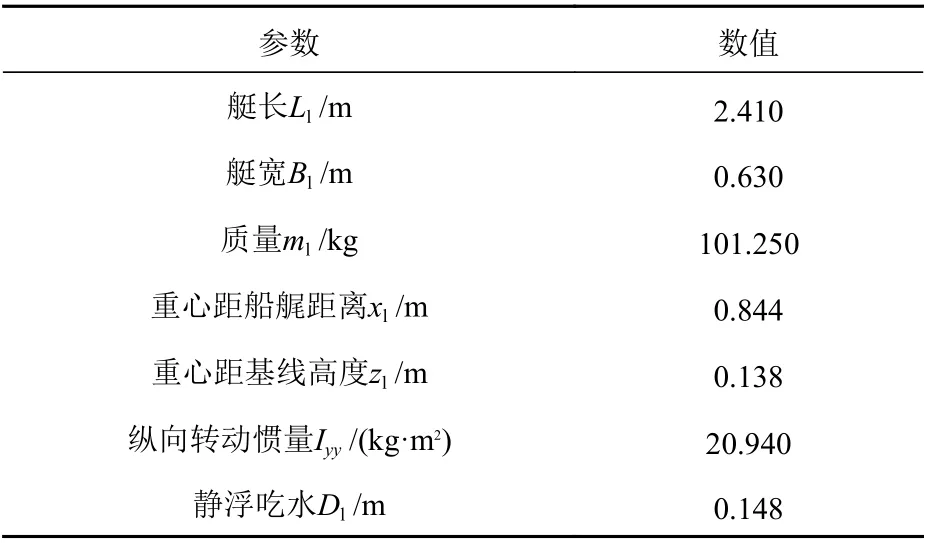
表1 GPPH 滑行艇結(jié)構(gòu)參數(shù)Table 1 Parameters of GPPH planing craft
重疊區(qū)域與背景區(qū)域的網(wǎng)格劃分結(jié)構(gòu)如圖2所示,其中背景區(qū)域大小為5L1×2L1×2L1,重疊區(qū)域大小為1.5L1×0.4L1×0.4L1。對(duì)重疊網(wǎng)格外圍區(qū)域適當(dāng)加密,以保證背景區(qū)域與重疊區(qū)域網(wǎng)格之間合理過(guò)渡,同時(shí)對(duì)水線面與艇體尾部開爾文興波區(qū)域的網(wǎng)格也進(jìn)行相應(yīng)的細(xì)化處理。根據(jù)船舶CFD 的計(jì)算經(jīng)驗(yàn),艇體表面的網(wǎng)格尺寸取艇長(zhǎng)的8‰,壁面y+值取為50,表面邊界層數(shù)為6,增長(zhǎng)率為1.3。

圖2 網(wǎng)格與邊界設(shè)置Fig. 2 Grid and boundary setting
根據(jù)來(lái)流的位置與方向,將艇體的上、下邊界與前端邊界均設(shè)置為速度入口,尾部邊界壓力設(shè)為出口邊界,左、右邊界根據(jù)運(yùn)動(dòng)計(jì)算的對(duì)稱性設(shè)置為對(duì)稱平面,并在壓力出口區(qū)域施加VOF 波阻尼,以減弱出口處因數(shù)值反射造成的回流影響。
由圖3 所示GPPH 滑行艇的數(shù)值計(jì)算結(jié)果,發(fā)現(xiàn)縱傾角、龍骨線濕長(zhǎng)度的結(jié)果與試驗(yàn)及文獻(xiàn)[16]中結(jié)果具有相同的變化特點(diǎn),并且誤差較小,即采用上述數(shù)值計(jì)算方法對(duì)高速航行狀態(tài)下的船舶進(jìn)行數(shù)值模擬,能夠得到較為準(zhǔn)確的運(yùn)動(dòng)響應(yīng)結(jié)果。

圖3 數(shù)值方法驗(yàn)證結(jié)果Fig. 3 Verification results of numerical method
2 兩棲平臺(tái)高速運(yùn)動(dòng)分析
本文研究對(duì)象為某高速滑行型兩棲平臺(tái),其在v= 20~25 kn 高速工況下的體積弗勞德數(shù)Fr?≈ 3.0,因航行狀態(tài)與高速艇類似,故沿用上述GPPH 滑行艇采用的數(shù)值方法進(jìn)行實(shí)尺度平臺(tái)在高速運(yùn)動(dòng)狀態(tài)下的數(shù)值計(jì)算,計(jì)算區(qū)域大小和網(wǎng)格尺度以兩棲平臺(tái)總長(zhǎng)L為基準(zhǔn)進(jìn)行確定。表2 所示為平臺(tái)主尺度信息,圖4 所示該平臺(tái)的外形與艉部壓浪板結(jié)構(gòu)示意圖,其中壓浪板分布在平臺(tái)中縱剖面兩側(cè),其下旋角度用α(單位:(°) )表示。
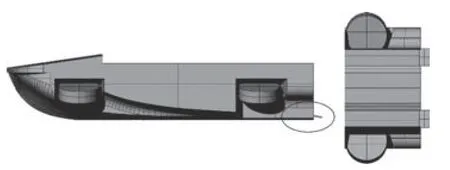
圖4 兩棲平臺(tái)外形與艉壓浪板示意圖Fig. 4 Outline of amphibiou platform and stern flap
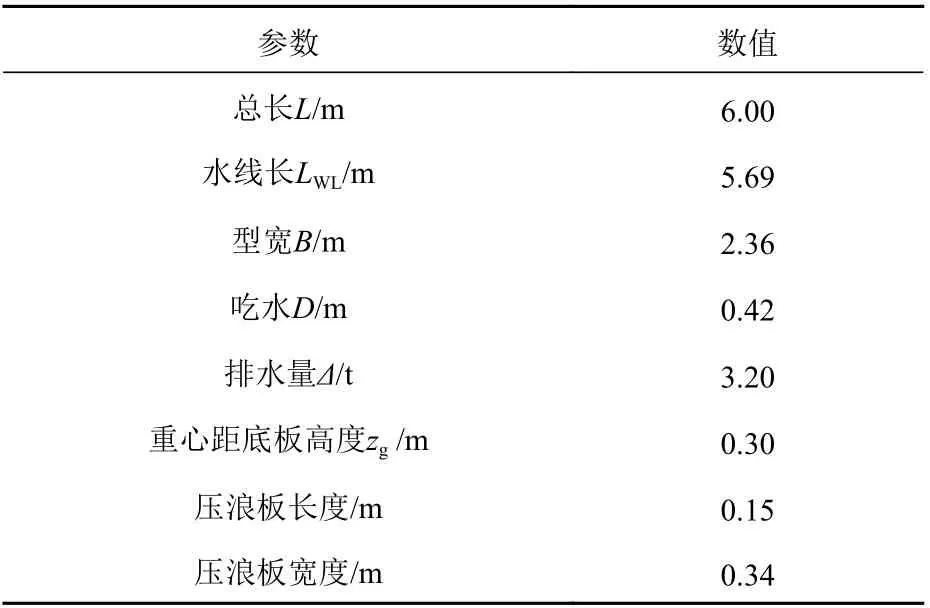
表2 兩棲平臺(tái)參數(shù)Table 2 Parameters of amphibious platform
基于上述數(shù)值方法,對(duì)兩棲平臺(tái)的表面網(wǎng)格進(jìn)行敏感性分析。計(jì)算中,平臺(tái)表面將分別以14,20,28 mm 這3 種細(xì)、中、粗網(wǎng)格予以劃分,網(wǎng)格尺度分別為平臺(tái)總長(zhǎng)的0.23%,0.33%和0.46%。按照前述計(jì)算域內(nèi)網(wǎng)格細(xì)化方法,這3 種方案的網(wǎng)格數(shù)分別為1.15×107,5.03×106和2.33×106。
本研究的重點(diǎn)在于分析壓浪板對(duì)兩棲平臺(tái)縱向運(yùn)動(dòng)的影響,故選取α= 8°,23°這2 種角度的壓浪板進(jìn)行驗(yàn)證,驗(yàn)證航速為22 kn。在3 種網(wǎng)格情況下計(jì)算得到的平臺(tái)航行姿態(tài)結(jié)果如表3 所示。從中可以看出,不同網(wǎng)格水平下縱傾角與升沉結(jié)果間差別較小,且隨著網(wǎng)格尺度逐漸細(xì)化,平臺(tái)姿態(tài)間的差異隨之減小,具有收斂的趨勢(shì)。綜合考慮計(jì)算效率與精度,確定平臺(tái)表面的網(wǎng)格尺寸為 20 mm,壓浪板表面網(wǎng)格細(xì)化為5 mm。基于流場(chǎng)是關(guān)于平臺(tái)中縱剖面對(duì)稱的考慮,將以半側(cè)流場(chǎng)進(jìn)行數(shù)值計(jì)算,壓浪板處的網(wǎng)格劃分如圖5 所示。
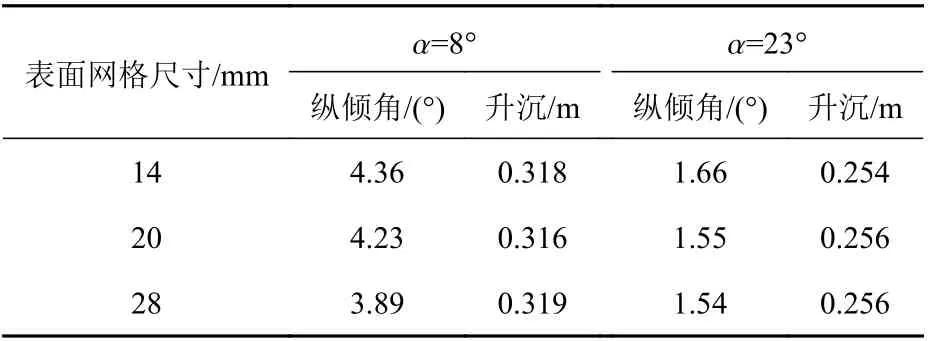
表3 網(wǎng)格敏感性結(jié)果Table 3 Results of grid sensitivity
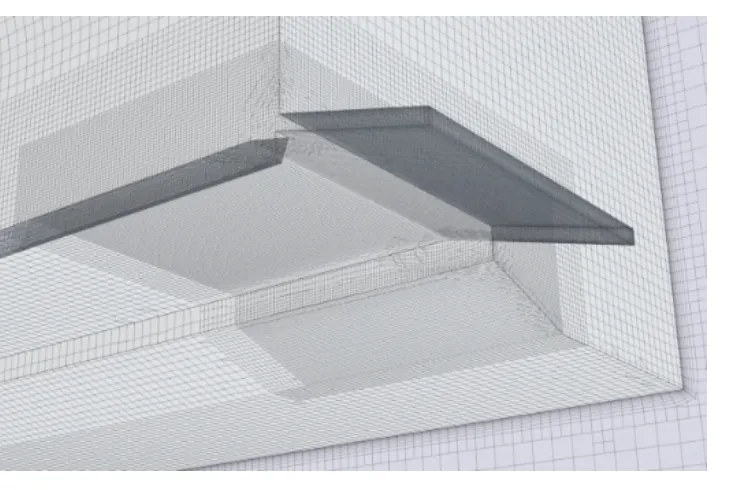
圖5 壓浪板網(wǎng)格劃分Fig. 5 Grid division of stern flap
2.1 壓浪板水動(dòng)力性能分析
2.1.1 對(duì)縱向運(yùn)動(dòng)的影響
為定性分析壓浪板對(duì)高速兩棲平臺(tái)水動(dòng)力性能的影響,對(duì)平臺(tái)在不同下旋角壓浪板作用下的運(yùn)動(dòng)特性進(jìn)行計(jì)算。表4 所示為相應(yīng)的縱傾角與相對(duì)升沉結(jié)果,其速度工況為v= 22 kn,重心在縱向距離艉板0.43L。
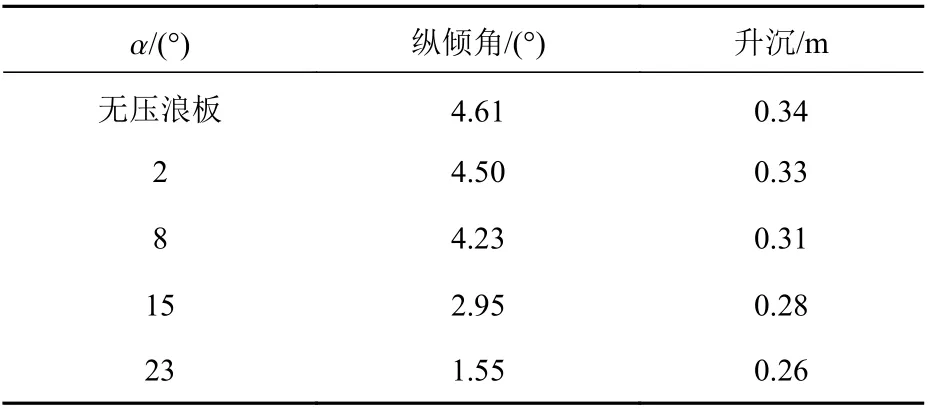
表4 22 kn 速度下的縱向運(yùn)動(dòng)結(jié)果Table 4 The results of longitudinal motion at a speed of 22 kn
由表4 可知,隨著壓浪板下旋角度α 的增加,平臺(tái)縱傾角呈減小趨勢(shì),且α 愈大其縱傾角減小得越明顯,同時(shí),平臺(tái)整體的升沉量也隨α 的增加而減小。究其原因可能在于,因壓浪板作用在平臺(tái)艉部,故其對(duì)縱傾角的影響相對(duì)較大,而對(duì)平臺(tái)整體的垂向抬升效果則不明顯,且相反地,由于縱傾角減小的原因,升沉量也隨之降低。
2.1.2 對(duì)波流場(chǎng)與壓力場(chǎng)的影響
為研究壓浪板對(duì)平臺(tái)尾流場(chǎng)波形的影響,選取不同α 作用下不同縱剖面處的波形進(jìn)行分析,所選縱剖面至中縱剖面的距離分別為Y=0,0.55,1.0,1.75 m,壓浪板布置在平臺(tái)艉部,距離中縱剖面0.55 m。圖6 所示為各剖面處的波形結(jié)果,其中X為縱向位置坐標(biāo)。
由圖6 可知,壓浪板對(duì)遠(yuǎn)場(chǎng)波形的影響較小,在不同下旋角壓浪板作用下,遠(yuǎn)場(chǎng)的波形基本一致,其主要作用范圍靠近壓浪板本身,約處于6~12 m 的范圍內(nèi);隨著α 的增加,Y= 0.55 m 位置處波形在壓浪板后有著較明顯的下降,其“虛尾”長(zhǎng)度則基本相同,而在壓浪板兩側(cè),Y= 0 m 和Y=1.0 m 位置處的波形則因壓浪板的擠壓有明顯的上升;在平臺(tái)寬度之外,也即Y= 1.75 m 位置處,波峰高度與波谷深度隨著α 的增加而減小,可見(jiàn)在高速下壓浪板對(duì)改善波流場(chǎng)具有一定的效果。
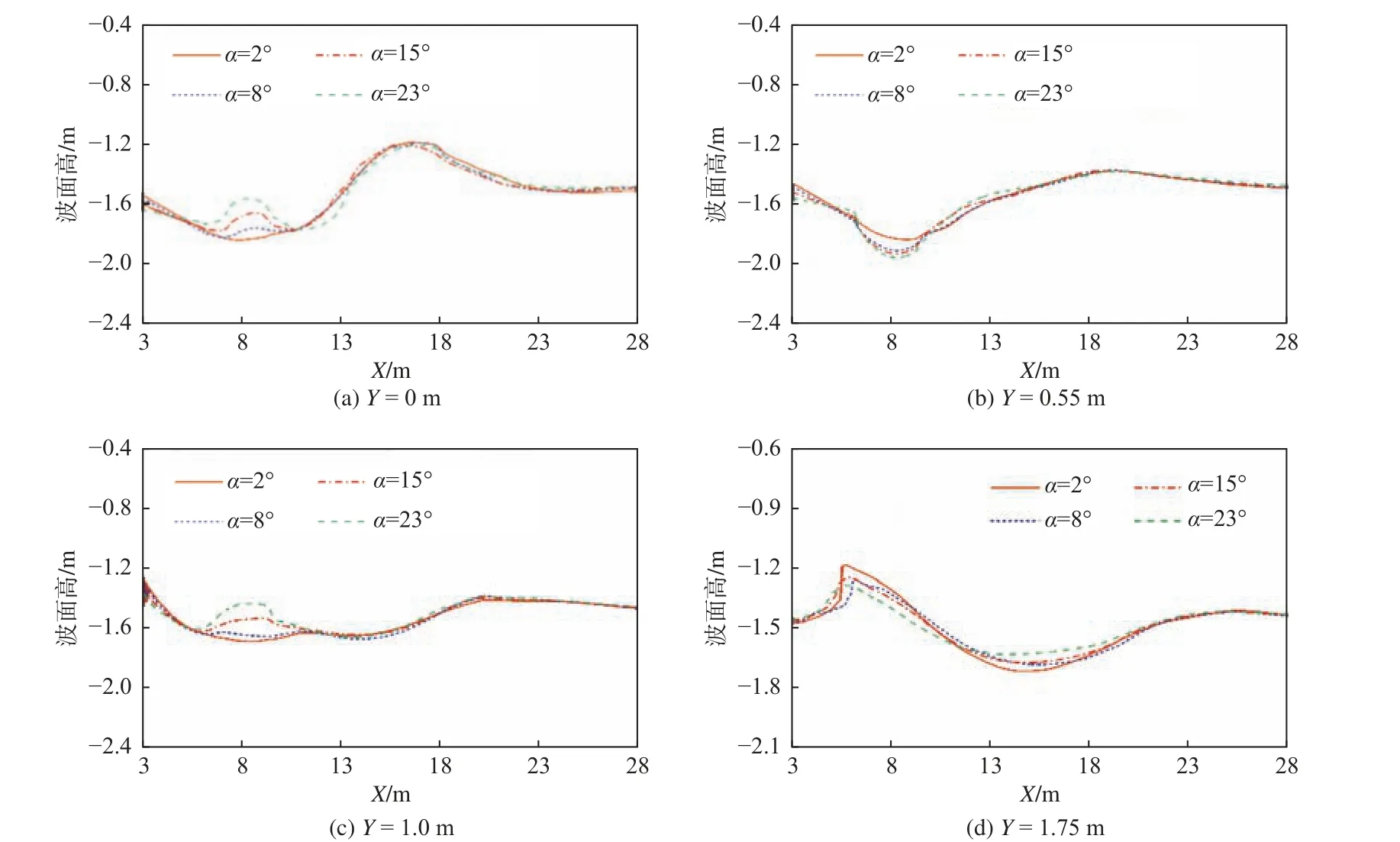
圖6 不同縱剖面處波形比較Fig. 6 Comparison of wave height at different longitudinal sections
艉部壓浪板不僅對(duì)波流場(chǎng)具有影響,其更明顯的作用是會(huì)影響平臺(tái)底部的壓力分布,從而產(chǎn)生誘導(dǎo)升力。圖7 所示為不同α 作用下平臺(tái)底部的壓力分布比較。從中可見(jiàn),壓浪板的存在使平臺(tái)艉部形成了明顯的相對(duì)高壓區(qū),其主要作用在壓浪板的寬度范圍,并且α 越大,高壓區(qū)越明顯。截取平臺(tái)后半部Y= 0.55 m 處平臺(tái)底面的縱剖線,比較v= 22 kn 速度下不同α 時(shí)壓浪板及平臺(tái)底部的相對(duì)壓力,如圖8 所示。壓浪板在α 接近于0°時(shí)形成的壓力峰值不明顯,在α = 8°及之后有明顯的增加,相對(duì)增幅達(dá)20%以上,并且在縱向的影響范圍也在不斷擴(kuò)大。
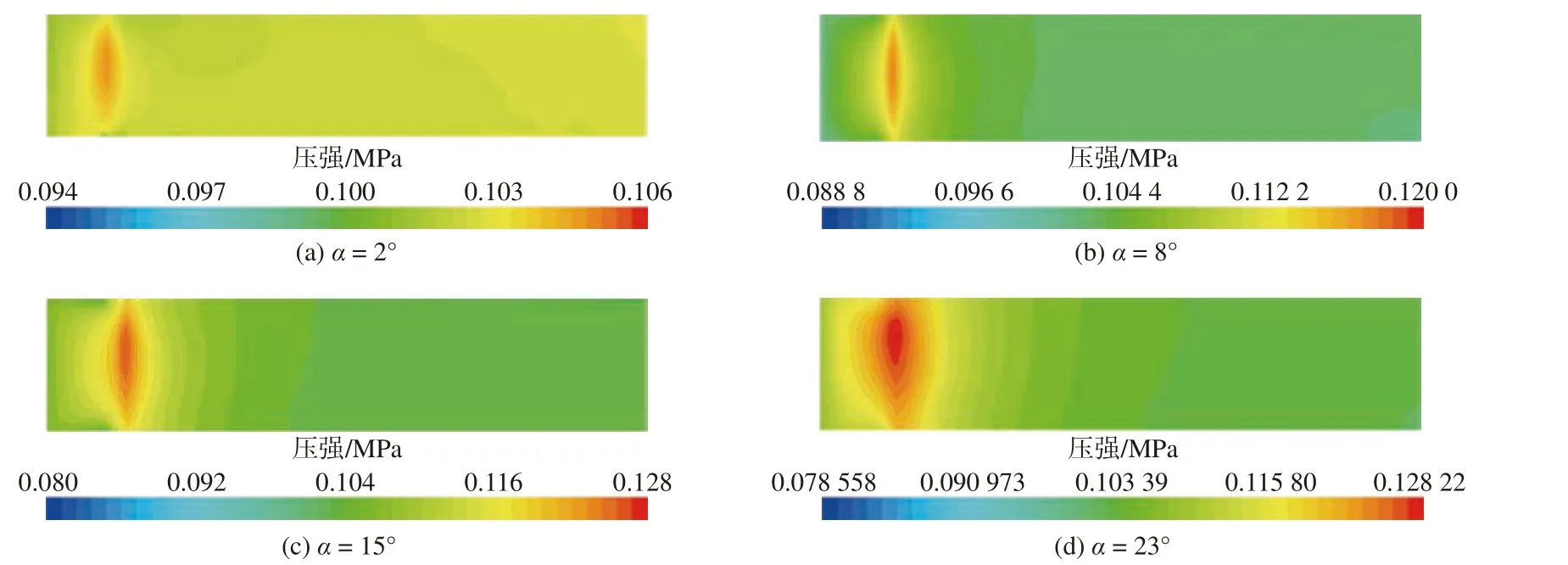
圖7 不同壓浪板下旋角時(shí)平臺(tái)底部相對(duì)壓力分布Fig. 7 Relative pressure distribution at the bottom of platform under different α
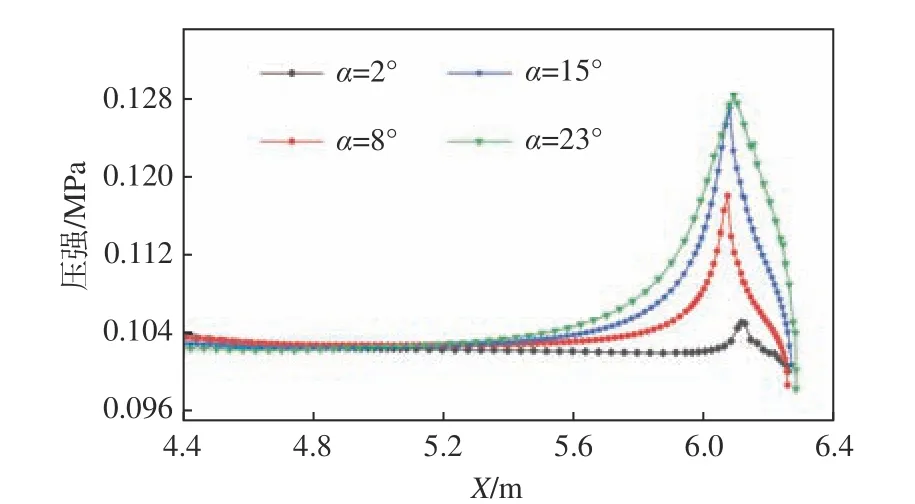
圖8 不同下旋角度時(shí)壓浪板及平臺(tái)縱剖線相對(duì)壓力比較(v = 22 kn)Fig. 8 Relative pressure on longitudinal section of platform and stern flap under different α (v = 22 kn)
根據(jù)上述分析,壓浪板是通過(guò)影響底部的壓力分布,在艉部產(chǎn)生明顯的誘導(dǎo)升力從而形成縱向的埋艏力矩,其對(duì)平臺(tái)縱向運(yùn)動(dòng)的影響表現(xiàn)為縱傾角與升沉的減小,故在受到外界擾動(dòng)時(shí),平臺(tái)的運(yùn)動(dòng)響應(yīng)越小,越容易保持平穩(wěn)狀態(tài),從而使平臺(tái)的運(yùn)動(dòng)穩(wěn)定性得到改善。
2.2 縱向運(yùn)動(dòng)穩(wěn)定性分析
2.2.1 設(shè)計(jì)參數(shù)及其對(duì)穩(wěn)定性的影響
定義重心至艉板的縱向距離與平臺(tái)總長(zhǎng)L的比值為r,在相同的重心位置下,航速越高,其運(yùn)動(dòng)穩(wěn)定性越差,而在相同的航速下,重心位置越靠后,越容易導(dǎo)致縱向運(yùn)動(dòng)失穩(wěn)。如圖9 所示,當(dāng)重心與壓浪板狀態(tài)保持不變時(shí),隨著航速的增大,其縱傾角的幅度也變大,收斂過(guò)程變慢。
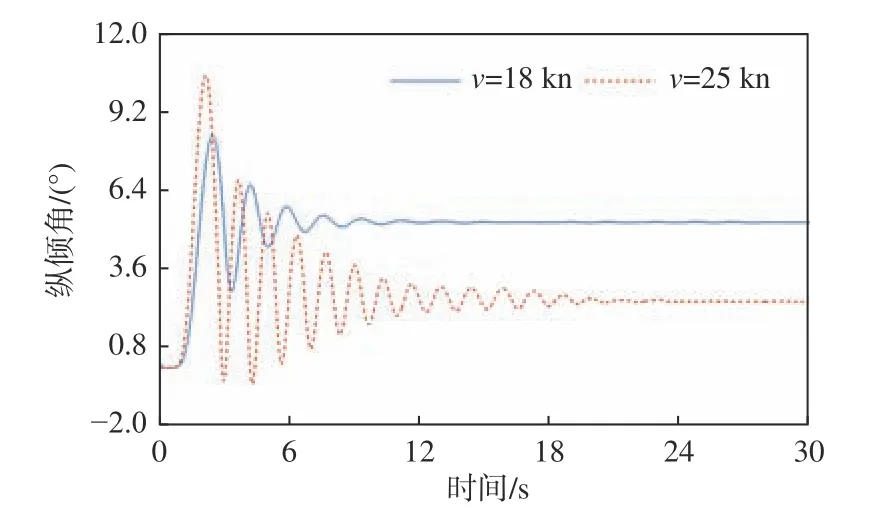
圖9 不同航速下的姿態(tài)收斂情況 (α=15°,r=0.40)Fig. 9 Attitude convergence at different speeds (α=15°, r=0.40)
以比值r、平臺(tái)航速v以及壓浪板下旋角α 為設(shè)計(jì)變量,r的取值范圍為[0.35,0.50],v的取值范圍為[10,28],在重心縱向位置r和航速v組成的設(shè)計(jì)空間內(nèi)隨機(jī)選取多個(gè)樣本點(diǎn),取α=2°,8°,15°,23°,對(duì)選取的樣本點(diǎn)進(jìn)行數(shù)值計(jì)算,并統(tǒng)計(jì)各樣本點(diǎn)所對(duì)應(yīng)縱向運(yùn)動(dòng)穩(wěn)定性的數(shù)值特征。以v= 22 kn,r= 0.43 的工況為例,由圖10 所示不同壓浪板狀態(tài)下的縱傾角收斂曲線,發(fā)現(xiàn)壓浪板的存在同時(shí)也減小了平臺(tái)縱搖的波動(dòng),并使其縱搖姿態(tài)收斂至基本穩(wěn)定的值,而相反對(duì)于未安裝壓浪板的情況,其運(yùn)動(dòng)姿態(tài)的波幅則較大,穩(wěn)定性得不到保證。

圖10 不同壓浪板狀態(tài)下姿態(tài)收斂情況 (v=22 kn,r = 0.43)Fig. 10 Attitude convergence at different stern flaps (v=22 kn,r = 0.43)
2.2.2 基于SVM 的運(yùn)動(dòng)穩(wěn)定性分類
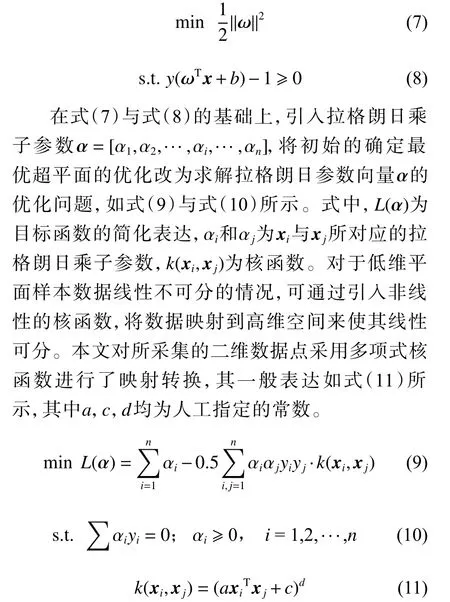
基于SVM 的數(shù)據(jù)分類,其主要原理是確定一個(gè)N維的最優(yōu)分類超平面,在將具有不同數(shù)值特征的兩類數(shù)據(jù)分割在超平面兩側(cè)的同時(shí),使超平面兩側(cè)距離該平面最近的樣本數(shù)據(jù)點(diǎn)之間的間隔最大,然后,以該超平面作為兩種類型數(shù)據(jù)之間的分布邊界[17]。當(dāng)N= 2 時(shí),超平面為二維直線;對(duì)于N≥2 的情況,超平面的一般形式為ωTx+b=0,其中,x為數(shù)據(jù)點(diǎn), ω為平面法向量,b為平面截距。二維超平面最大間隔優(yōu)化問(wèn)題的目標(biāo)函數(shù)為:

令不同類型數(shù)據(jù)點(diǎn)的特征標(biāo)簽y= 1 或?1,優(yōu)化問(wèn)題的目標(biāo)函數(shù)可以簡(jiǎn)化為:
針對(duì)每一個(gè)不同的壓浪板下旋角α,將采集到的樣本按CFD 計(jì)算所得的穩(wěn)定性特征進(jìn)行分類,并應(yīng)用SVM 分類算法找尋其在縱向運(yùn)動(dòng)方面的穩(wěn)定與失穩(wěn)之間的分類超平面。對(duì)于針對(duì)不同樣本點(diǎn)計(jì)算的姿態(tài)時(shí)歷曲線,若其在一定時(shí)間內(nèi)未表現(xiàn)出明顯的收斂趨勢(shì),則判斷該樣本點(diǎn)的狀態(tài)為失穩(wěn)點(diǎn),由于在理論上無(wú)法確定超平面上點(diǎn)的穩(wěn)定性特征,為確保穩(wěn)定性狀態(tài)分類的可靠性,在賦予采集樣本穩(wěn)定性特征之時(shí),將以28 s作為時(shí)間標(biāo)準(zhǔn),以使所得分類超平面更加偏向于穩(wěn)定的一側(cè)。圖11 所示為不同下旋角壓浪板作用下樣本點(diǎn)的分類結(jié)果。
針對(duì)圖11 所示分類結(jié)果,對(duì)分類中因樣本點(diǎn)分布的局部密集與稀疏問(wèn)題可能導(dǎo)致的分類結(jié)果不準(zhǔn)確問(wèn)題,降低圖中距離分界線太近甚至越過(guò)邊界的穩(wěn)態(tài)點(diǎn)的速度值,例如在α = 2°情況下r= 0.45 附近的穩(wěn)態(tài)點(diǎn),以及α = 8°情況下r= 0.47附近的穩(wěn)態(tài)點(diǎn),并在樣本分布稀疏的區(qū)域補(bǔ)充新的采樣點(diǎn),如在α = 23°情況下新增r= 0.47,v= 23 kn和r= 0.37,v= 20 kn 這2 個(gè)樣本點(diǎn),然后對(duì)調(diào)整和新增的樣本點(diǎn)再次進(jìn)行CFD 計(jì)算,并基于穩(wěn)定性結(jié)果進(jìn)行數(shù)據(jù)分類。圖12 所示為重新分類完成后的結(jié)果,其中各曲線的左上區(qū)域?yàn)閷?duì)應(yīng)α 下的運(yùn)動(dòng)不穩(wěn)定區(qū)域。
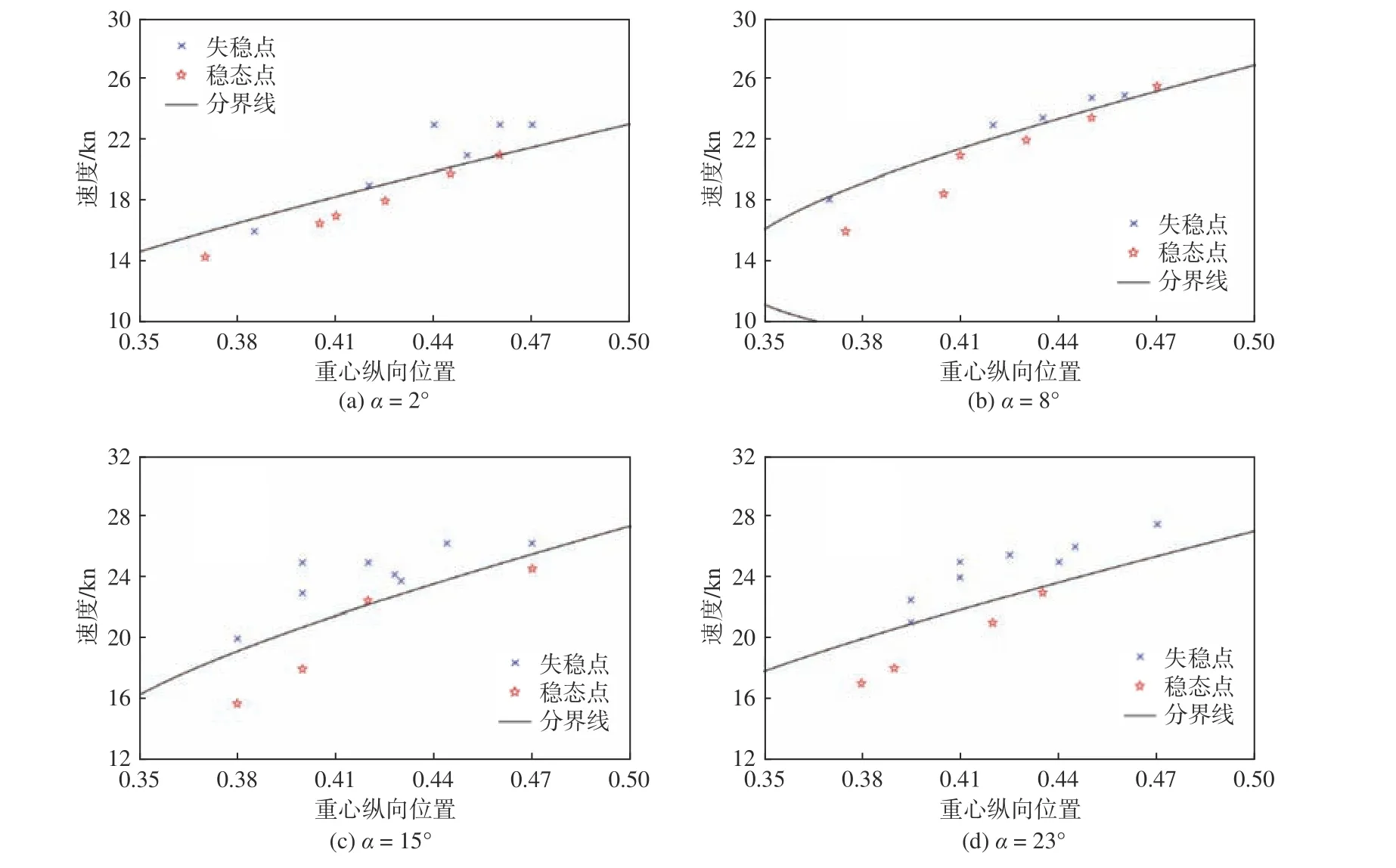
圖11 不同下旋角壓浪板作用時(shí)的穩(wěn)定性分類結(jié)果Fig. 11 Stability classification results at different α
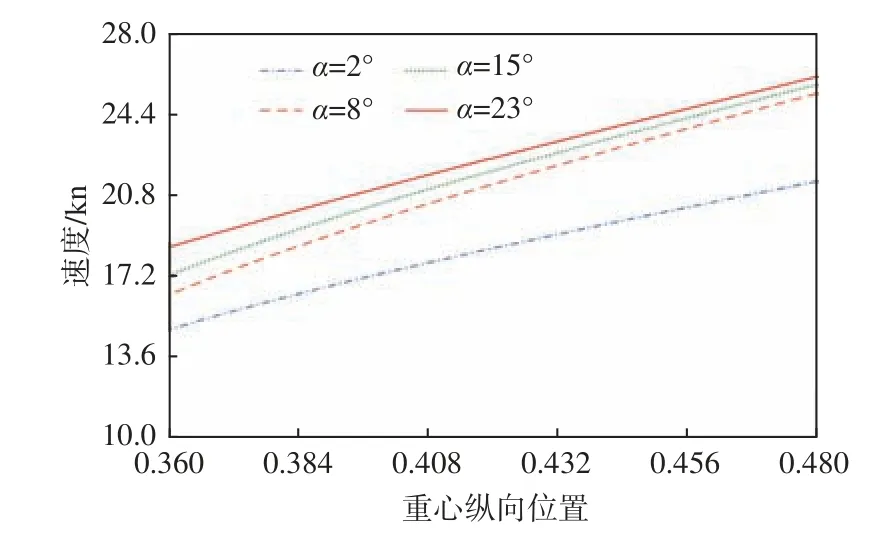
圖12 不同下旋角壓浪板作用時(shí)的平臺(tái)穩(wěn)定性邊界Fig. 12 Boundary of platform stability at different α
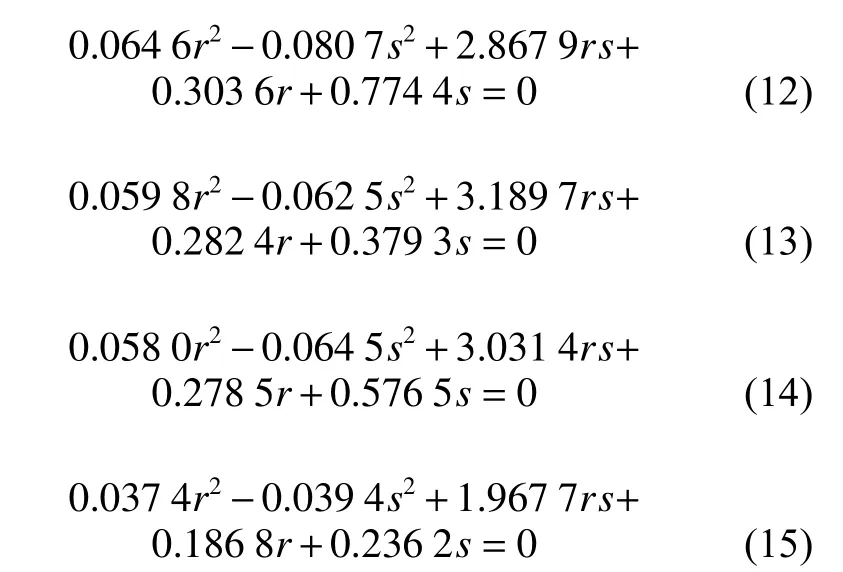
最終,分類得到α=2°,8°,15°和23°壓浪板作用下平臺(tái)運(yùn)動(dòng)穩(wěn)定性邊界的數(shù)值表達(dá)分別如式(12)~式(15)。式中,r代表橫坐標(biāo)的重心縱向位置,也即重心至艉板的縱向距離與平臺(tái)總長(zhǎng)L的比值,s代表兩棲平臺(tái)的航速,也即圖12 所示的縱坐標(biāo)。
根據(jù)平臺(tái)的縱向運(yùn)動(dòng)穩(wěn)定性分類結(jié)果,當(dāng)其他參數(shù)因素一定時(shí),通過(guò)調(diào)節(jié)重心的縱向位置,可以提高其在穩(wěn)定狀態(tài)下所能達(dá)到的速度上限,但由于平臺(tái)重心前、后位置的變化范圍不大,對(duì)提高穩(wěn)定航速的意義不是很大,因此確定兩棲平臺(tái)在無(wú)其他附體情況下所能達(dá)到的穩(wěn)定航速不超過(guò)21 kn。
而通過(guò)在平臺(tái)艉部加裝具有下旋角度的壓浪板,則可顯著提高平臺(tái)在不同航速下縱向運(yùn)動(dòng)的穩(wěn)定性。由圖12 所示,當(dāng)壓浪板下旋角α 從2°增加到8°時(shí),平臺(tái)在穩(wěn)定狀態(tài)下能夠達(dá)到的最大航速有明顯的提升,但隨著α 的繼續(xù)增大,提升效果逐漸減弱;另通過(guò)對(duì)比統(tǒng)計(jì)不同重心位置下變角度壓浪板的作用效果,發(fā)現(xiàn)當(dāng)α = 23°時(shí)平臺(tái)所能達(dá)到的最大穩(wěn)定航速相較于α = 2°時(shí)的情況,平均提升幅度約19%,在重心距離艉板0.46L的情況下,最大穩(wěn)定航速可提升至25 kn。
3 結(jié) 論
本文針對(duì)艉壓浪板對(duì)高速兩棲平臺(tái)縱向運(yùn)動(dòng)以及水動(dòng)力性能的影響開展了研究,主要得到以下結(jié)論:
1) 壓浪板對(duì)平臺(tái)后方遠(yuǎn)場(chǎng)的波長(zhǎng)影響較小,增大壓浪板下旋角度,“虛尾”附近的興波波幅會(huì)隨之增加,并且在縱傾角隨之減小的同時(shí),平臺(tái)兩側(cè)興波的波峰也會(huì)隨之降低。
2) 壓浪板能夠改變兩棲平臺(tái)底部的壓力場(chǎng),使尾部區(qū)域出現(xiàn)集中的高壓區(qū),當(dāng)壓浪板下旋角α 從0°增加至23°左右時(shí),其高壓區(qū)域明顯增大。
3) 通過(guò)改變平臺(tái)底部的壓力場(chǎng)分布而誘導(dǎo)產(chǎn)生埋艏力矩,壓浪板可在降低平臺(tái)航行縱傾角的同時(shí),減小其縱向運(yùn)動(dòng)的波動(dòng),加速姿態(tài)穩(wěn)定性收斂,提高兩棲平臺(tái)的航行穩(wěn)定性。
4) 通過(guò)改善不同航速下平臺(tái)的縱向運(yùn)動(dòng)穩(wěn)定性,發(fā)現(xiàn)壓浪板可延后其運(yùn)動(dòng)穩(wěn)定與失穩(wěn)的界線,且相同重心位置處壓浪板的存在使得平臺(tái)的最大穩(wěn)定航速有了較為明顯的提升。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15