一種新的V2I下車速規劃與模型預測控制方法
2022-07-14 03:55:22李振鵬劉自斌
重慶交通大學學報(自然科學版) 2022年7期
劉 平,李振鵬,蔣 平,舒 航,劉自斌
(1. 西南交通大學 機械工程學院,四川 成都 610031; 2. 西南交通大學 先進驅動節能技術教育部工程研究中心,四川 成都 610031; 3. 成都客車股份有限公司,四川 成都 611743)
0 引 言
隨著國家經濟的高速增長,我國機動車保有量迅速增加,交通擁堵和環境污染問題所帶來的影響已經不容忽視,在城市道路網信號交叉口節點,這一問題尤為嚴重。車輛在信號交叉口處受控制信號的周期性干擾,處于一種“停-走”式的交通運行模式,導致交叉口通行效率下降,不僅帶來出行時間延誤,還帶來燃油消耗及污染物排放上升[1]。近年,隨著無線電子通訊技術快速發展,利用車聯網的車速規劃與車速控制結合,來解決交叉路口的“停-走”模式成為一種有效的方法。
在車速規劃方面,M.BARTH等[2]提出了基于三角函數變化的動態經濟駕駛,將干道上交通信號燈的相位和定時信息提供給車輛,車輛可以在通過信號燈時調整其速度,最大限度降低油耗和排放;T.W.SUNG等[3]提出了一種根據駕駛條件確定經濟參考速度的駕駛規劃方案,該方案以平滑車速變化,減少車輛等待時間,提高在一個時間段內通過交叉口的車輛數量,經仿真該方案在平均等待時間和碳排放量評估方面表現良好;石琴等[4]提出基于固定引導時長的車隊車速引導策略,并與固定引導距離的車隊車速引導策略進行對比,結果表明該方案能顯著減少車隊在信號交叉口通行的車輛延誤和燃油消耗。
在車聯網車速控制方面,研究主要集中在優化控制上,大體可分為全局優化和局部優化。全局優化方法以動態規劃為代表,G.OH等[5]使用動態規劃來確定燃料最優策略、時間最優策略和平衡生態駕駛策略這3種不同生態駕駛策略的全局最優軌跡,該方法在不犧牲出行時間前提下,平均節省40%~50%的燃油;G.MA等[6]將能量管理結合車輛協同控制,采用動態規劃的方法,在統一的框架下研究了混合動力汽車的能量管理問題和一組混合動力汽車的分散協調問題,通過綜合優化,車輛能夠在最省油區域附近運行,電池在保持始末相同充電狀態的同時,可以避免耗盡或過度充電。局部優化方法主要以模型預測控制為代表,B.HOMCHAUDHURI等[7]研究了一組車輛在擁擠的城市道路條件下的燃油經濟控制策略,利用交通信號燈的相位和定時(SPAT)信息,采用改進成本的模型預測控制,減少了紅燈停車次數,提高了一組車輛的燃油經濟性;J.HAN等[8]提出了一種在保證車輛安全約束前提下,實現聯網和自動化車輛最佳加減速的安全環保駕駛控制系統,該方法在不增加行車時間的情況下,能顯著降低能耗,避免碰撞。
目前研究中任存在一些不足:①僅僅考慮對車速進行規劃而不考慮依據汽車特性進行控制;②雖考慮了在車速規劃基礎上進行控制,但是采用的基于全局優化的控制方法計算復雜、缺少工況適應性。因此,筆者針對一個V2I場景,以提高車輛通行效率、舒適性和經濟性為目標,擬提出一種將車速規劃與車速控制相結合的方法,并通過仿真進行驗證。
1 研究場景與思路
1.1 V2I場景設置
研究客車直線通過支持V2I的交通路段,搭建的車聯網駕駛環境如圖1。場景全長3 316 m,共6個紅綠燈路口,客車主要在車聯網中作為信息接收方,路口的紅綠燈作為信息的發送方。紅綠燈主要發送的信息包括紅綠燈ID,紅綠狀態Tf,紅燈開始時間Tr,綠燈開始時間Tg和位置坐標。一個信號周期為Tp,包括綠燈周期Tgp和紅燈周期Trp。
圖1 研究的V2I場景
1.2 研究思路
在V2I場景中,首先需利用紅綠燈信號規劃客車速度,以解決客車路口怠速問題,因此要計算參考車速;其次為了改善駕駛舒適性和經濟性,采用MPC對客車進行車速的追蹤控制。可將網聯客車的控制分為兩層:第一層為車速規劃層,主要計算參考車速;第二層為車速控制層,主要利用MPC控制汽車。研究思路如圖2。
圖2 研究思路
在具有V2I網絡的交通路口中,首先將紅綠燈相位信息發送給客車,先進行車速規劃,即利用紅綠燈信息與客車當前的運動狀態計算參考車速,再以參考車速為目標基于MPC對客車進行控制,從而實現客車對參考車速的追蹤。而被控客車的狀態又反饋給車速規劃層和車速控制層,重新計算參考車速并重新進行MPC控制。
2 參考車速
客車接收到紅綠燈信號后,便開始計算參考車速范圍,計算流程如圖3。
圖3 參考車速計算流程
在參考車速計算中需要確定合理的接收距離,設接收紅綠燈信號的距離為接收距離d。接收距離過大會造成計算資源浪費,接收距離過小則導致控制不及時。考慮客車需要足夠的控制時間,則接收距離d的確定如式(1):
d=Tp×v0
(1)
式中:v0為客車勻速路段巡航車速,同時也是接受距離外的參考車速,取v0=30 km/h;Tp為當前路口紅綠燈的信號周期,設計各路口紅綠燈的周期在25~30 s之間。
通過路口的參考速度,由客車與交通信號燈的當前距離和交通信號燈的相位共同決定,主要遵循原則為:①保持當前速度能在紅燈前通過路口;②在保證駕駛舒適性前提下,以允許的最大加速度加速至道路最大限制車速,并在綠燈結束前通過路口;③減速至最低車速(指客車在紅燈剩余時間內勻速行駛剛好到達路口的車速)在下一次綠燈來臨時通過路口。這樣就能避免客車在路口前進入怠速工況。
根據客車與交通信號燈的當前距離(取距離的絕對值ds)是否進入接收距離的范圍,計算分兩種情況。
2.1 進入接收距離范圍

(2)
(3)

(4)
(5)
式中:fn為n/2的向上取整值,即fn總是大于或等于n/2。
為了減少出行時間,參考車速vref應該以盡可能大,參考車速計算如式(6):
(6)
2.2 未進入接收距離范圍
此時客車經過停車線進入路口段,應該讓客車以盡可能大的車速通過,若此時參考車速大于巡航車速v0,則保持當前車速不變;若此時參考車速小于巡航車速v0,則有:
vref=v0
(7)
3 變權重的車速MPC控制
3.1 預測模型的建立
在研究V2I應用場景時,主要考慮客車在縱向上的行駛情況,可以用汽車縱向動力學來預測客車的縱向車速。汽車動力學模型如式(8):
(8)
式中:δ為旋轉質量換算系數;m為客車質量;FD為總驅動力;i0為主減速比;ig為變速器傳動比;Fb為制動力;Fr為行駛阻力,包括空氣阻力,滾動阻力和坡道阻力,Fr計算如式(9):
(9)
式中:CD為空氣阻力系數;A為迎風面積;v為車速;g為重力加速度;θ為坡道傾斜角;μ為滾動阻力系數。研究主要考慮在水平路面,取θ=0。
設TS為采樣周期,對式(8)、式(9)進行離散化,得到式(10)的離散狀態方程,即為預測模型。
x(k+1)=Ax(k)+Bμ(k)+Dφ(k)
(10)

3.2 滾動優化函數
選取的目標函數包含4項,分別是客車參考車速的跟隨、加速度、沖擊度和制動力。參考車速的跟蹤是為了提高路口的通過率,客車的加速度和沖擊度是為了提高舒適性,而制動力是對經濟性的間接體現,較小的制動力可避免能量浪費。目標函數J(t)為4項的加權和,如式(11):
ω2[a(t)]2+ω3[Jerk(t)]2+ω4[Fb(t)]2}
(11)
式中:k為MPC的預測步長;ω1,ω2,ω3和ω4是各項的權重系數;v(t)為車速;a(t)為加速度;Jerk(t)是車輛縱向加速度的變化率[9],即沖擊度,不同沖擊度對舒適性影響顯著,為不影響乘客舒適感,沖擊度不應該超過±2.94 m/s3[10]范圍。
采用固定的權重系數,就不能在工況變化時同時滿足出行時間與駕駛舒適性。因此設計了變權重方法,選取需滿足以下原則:①當參考車速vref與實際車速v差值(用差值的絕對值vs表示)較小時,主要目標為加強追蹤參考車速的能力,即適當選取較大的ω1;②當vs較大時,此時因變速會造成較大的沖擊度,因此主要提高舒適性,即適當選取較大的ω2和ω3;③權重系數的選取要有明確上下限,避免過大ω2和ω3帶來沖擊度震蕩,過小的ω1會帶來追蹤目標速度的變化不明顯,造成不必要的算力浪費;④當處于加速狀態時,為減少制動力的出現頻率,取較大的ω4。
權重系數ω1、ω2和ω3的在不同車速差時的選取如式(12)~(14):
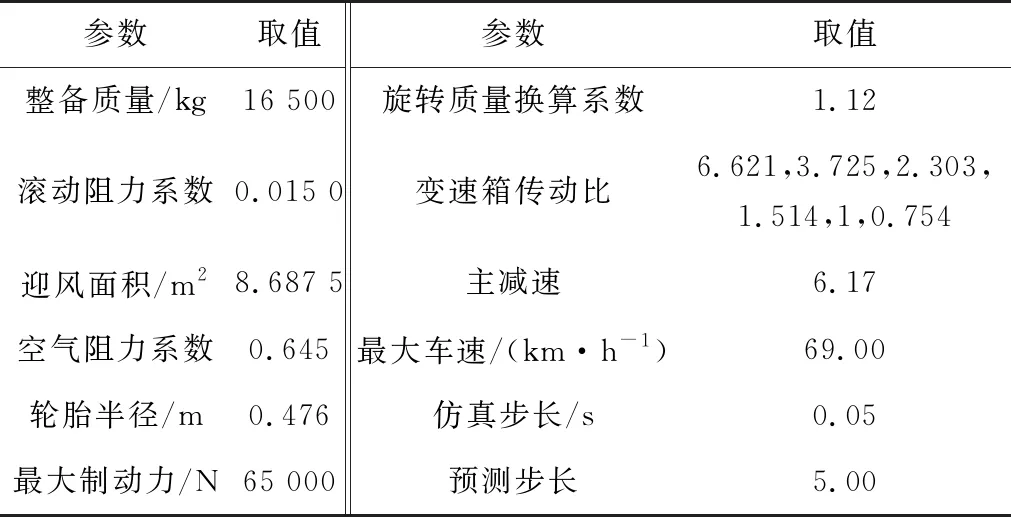
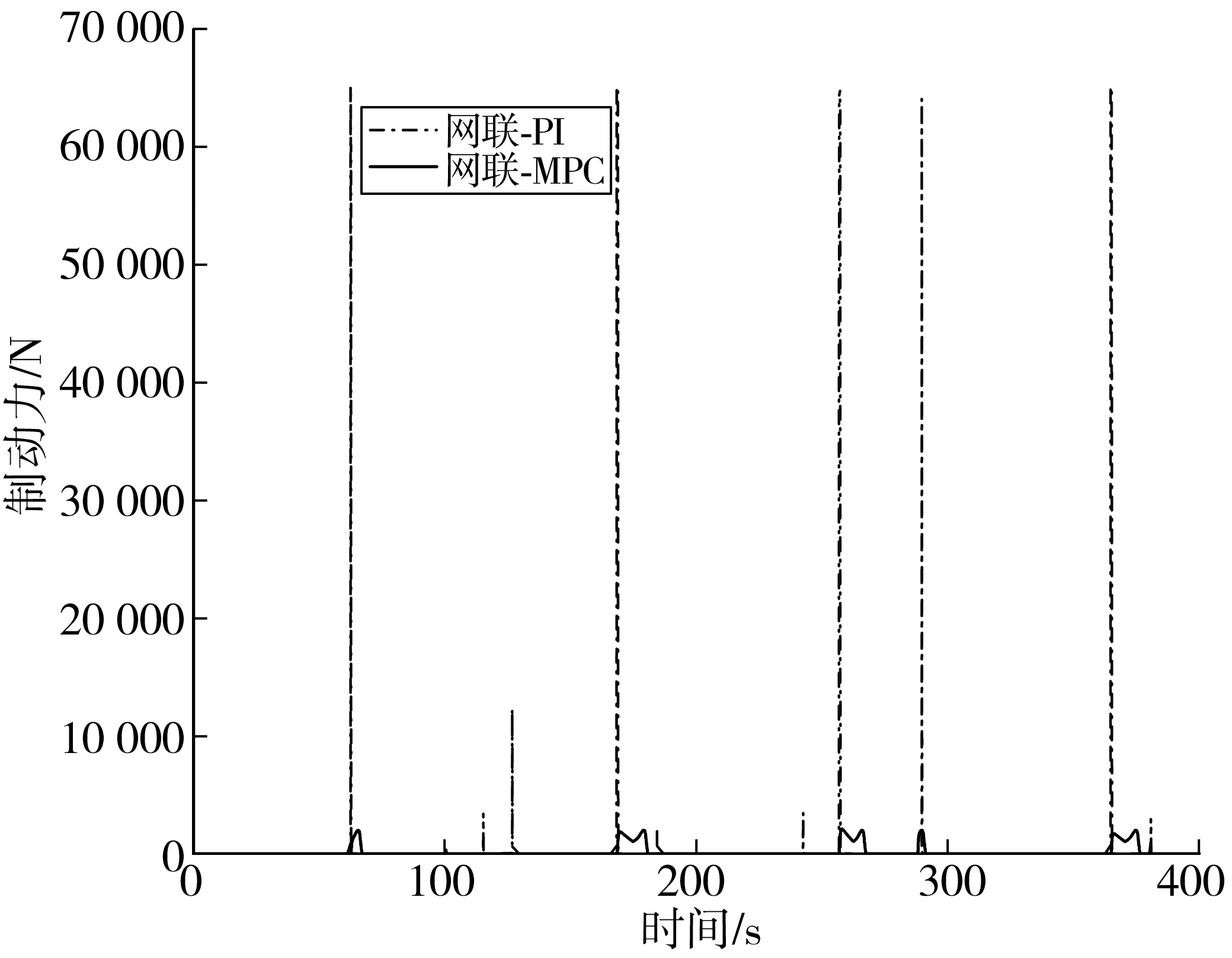
當0.2 (12) 當0.2≥vs,則: (13) 當1.1≤vs,則: (14) 權重系數的ω4選取如式(15): (15) 在利用模型預測控制進行客車車速跟蹤時,還需要滿足一些狀態約束,以避免求解得到無法實施的控制量或出現控制狀態不理想的情況。 加速度的約束為: amin≤a(t)≤amax (16) 考慮駕駛舒適性,加速度宜在±1.6 m/s2范圍內[11]。 制動力Fb最大值由客車最大制動力決定,FD是客車的總驅動力,它的最大值由發動機和電機MAP依據當前轉速nrpm決定,即: 0≤FD(t)≤Fmax (17) 0≤Fb(t)≤Fb_max (18) 客車的車速約束為: 0≤v(t)≤vmax (19) 采用Prescan與simulink聯合建模進行仿真。Prescan主要搭建交通場景, Simulink主要處理V2I下的信息交互和計算處理,即建立參考車速計算模型、MPC控制模型和被控對象的模型。使用序列二次規劃(SQP)求解非線性的MPC目標函數,調用MATLAB的求優函數進行求解。聯合仿真模型主體如圖4,仿真參數如表1。 圖4 V2I車速規劃與控制仿真模型 表1 仿真參數表 為了便于分析,對比了兩種情況:①控制層采用相同方法(采用PI),而速度規劃層分別采用傳統駕駛規劃[12]和筆者的網聯速度規劃方法,相應的方法簡稱為傳統規劃和網聯規劃;②速度規劃層都采用網聯速度規劃,而控制層分別采用PI控制和MPC控制,對應的方法分別簡稱為網聯-PI和網聯-MPC。 4.2.1 通行效率對比 通行效率由車速規劃層所采用的方法決定。將傳統規劃與網聯規劃的通行時間和通行速度進行對比,分別如圖5、圖6。 圖5 通行時間對比 圖6 車速對比 圖5中的灰色虛線表示紅綠燈的狀態,其中灰色虛線部分代表紅燈時間窗口,空白部分代表綠燈時間窗口。由圖5可知:在同樣的駕駛行程中,傳統規劃方法耗時450.30 s,而網聯規劃耗時398.25 s,比傳統規劃方法節省了52.05 s。傳統規劃在6個紅綠燈口共出現了5次怠速,而網聯規劃能在綠燈結束時進行加速,或者在紅燈結束時進行減速通過十字路口,因此能減少許多怠速情況的發生,減少了出行時間,這說明經網聯車速規劃后,相比傳統車的駕駛模式,能顯著降低乘客的出行時間。 圖6為傳統駕駛與網聯規劃0~130 s內的通行時速對比,通行速度情況經整理后可得:網聯規劃平均車速為29.38 km/h,最大車速為36.93 km/h超過巡航車速v0(30 km/h),而傳統規劃平均車速為25.98 km/h,最大車速29.91 km/h,接近給定的巡航車速v0,并且在60~80 s內發生了第一次怠速工況。網聯規劃方法避免了停車怠速情況的發生,使車速維持在一個較高水平,提高了通行效率。 4.2.2 舒適性對比 舒適性由車速控制層的控制方法決定。將網聯-PI與網聯-MPC的加速度和沖擊度進行對比,分別如圖7和圖8。 圖7 加速度對比 圖8 沖擊度對比 圖7中的加速度情況經整理后可得:網聯-PI平均加速度為0.021 m/s2,最大加速度為7.701 m/s2,最大減速度為-3.650 m/s2,并且最大減速度頻繁出現;雖然網聯-MPC平均加速度也是0.021 m/s2,但與網聯-PI相比,其最大加速度為1.600 m/s2,最大減速度為-0.246 m/s2,分別降低了79.22%、93.26%。并且在行駛過程中網聯-MPC的加減速度都在±1.6 m/s2的范圍內,滿足加速度對舒適性的影響要求。因此,顯然網聯-MPC的優勢更大。 圖8中的沖擊度情況經整理后可得:網聯-PI的最大加速沖擊度為106.359 m/s3,最大減速沖擊度為-73.001 m/s3,都遠高于網聯-MPC的加速和減速沖擊度,并且網聯-PI沖擊度變化劇烈且頻繁。此外網聯-MPC的最大加速沖擊度為7.733 m/s3,且僅出現在起步階段,而最大減速沖擊度為-2.643 m/s3,與網聯-PI相比,分別減少了92.73%和96.38%。并且在行駛過程中除起步階段外,網聯-MPC的沖擊度都沒超過±2.94 m/s3,因此在保證舒適性方面都遠比網聯-PI控制的對象要好。 無論是從加速度還是沖擊度的角度考慮對舒適性的影響,都可以說明經由網聯-MPC控制的車能更好的滿足舒適性要求。 4.2.3 經濟性對比 經濟性由車速控制層的控制方法決定,以行駛中制動力使用情況來表征經濟性。將網聯-PI與網聯-MPC的制動力進行對比,如圖9。 圖9中的制動力情況經整理后可得:網聯-PI的平均制動力為297.504 N,最大制動力為65 000.000 N,且多次達到了客車最大制動力值;網聯-MPC控制下的平均制動力為149.378 N,最大制動力為2 098.423 N,與網聯-PI相比,分別降低了49.79%和96.77%。這表明在整個行駛里程上,客車所用的制動更少,制動強度更小,減少了能量的損耗,提高了經濟性。 圖9 制動力對比 針對城市交叉口復雜的交通場景,提出了一種提高通行效率的車速規劃和設計了變權重系數的車速MPC控制方法,所得結論如下: 1)在通行效率方面,在相同的行駛里程里,由于網聯客車能維持在較高車速且不發生路口怠速,相比傳統客車節省更多的時間。 2)在舒適性方面,網聯-MPC控制策略的加速度和沖擊度分別控制在較佳的范圍內。與網聯-PI控制策略相比,網聯-MPC控制策略的最大加減速度分別降低了79.22%、93.26%,最大加減速沖擊度分別降低了92.73%和96.38%。相對于網聯-PI的控制策略,網聯-MPC的控制策略舒適性更高。 3)在經濟性方面,與網聯-PI控制策略相比,網聯-MPC控制策略的平均制動力和最大制動力分別降低了49.79%和96.77%,使得更少制動情況發生,且制動情況更為緩和,改善了經濟性。3.3 約束條件
4 仿真與結果分析
4.1 仿真模型的搭建
4.2 結果分析
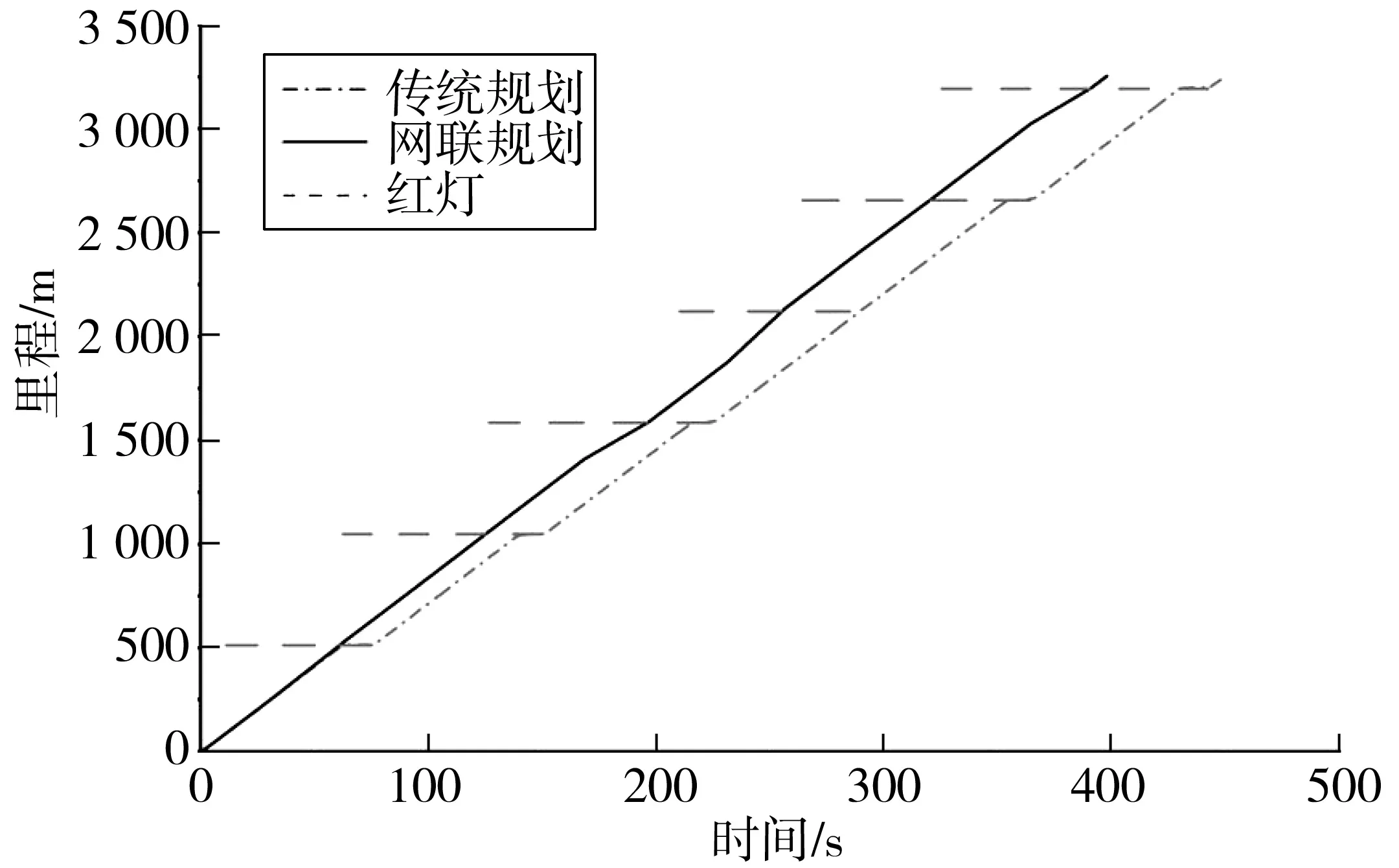

5 結 論
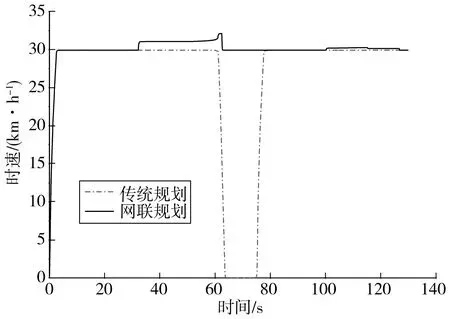
猜你喜歡
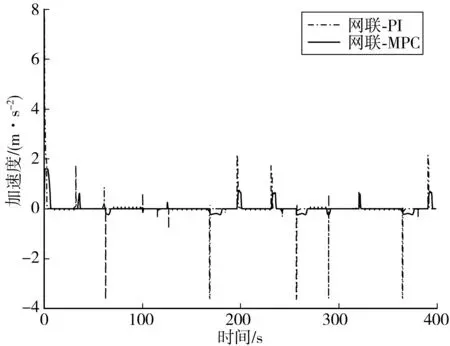
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
領導決策信息(2018年50期)2018-02-22 06:17:16
池州學院學報(2017年3期)2017-10-16 01:38:35
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
消費者報道(2016年3期)2016-02-28 19:07:32
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
