基于圖像處理下無人機拍攝裂縫輔助裝置的設計研發
2022-07-15 08:55:30謝東輝李登華
工程質量 2022年6期
孫 晨,丁 勇,謝東輝,李登華
(1.南京理工大學理學院,江蘇 南京 210094;2.寧波原水有限公司皎口水庫分公司,浙江 寧波 315000;3.南京水利科學研究院,江蘇 南京 210024)
0 引言
先前對于裂縫監測大多采用人工手段與專業儀器結合的方式,通過實際工程應用發現,該方式具有機動性較低、成本較大等特點。尤其在面對高層建筑與水庫水壩等復雜工程時,利用專業儀器與人工觀測的傳統監測方法已經無法滿足當下需求。近年來,隨著新一輪產業技術革命——“互聯網+”和以 BIM 為代表的信息技術的興起,BIM 技術、無人機、3D 掃描、3S 等信息技術的應用,結合施工機器人的自動化技術,智慧建造正在從理念成為現實[1]。因此,目前利用無人機拍攝采集裂縫照片后以圖像處理方式進行自動化監測的方法逐漸廣泛。
1 拍攝裂縫檢測現狀
1.1 人工檢查
人工檢查的方式較為靈活,但是檢測的精確程度有待商榷。雖然目前人工檢查通常配備專業儀器進行觀測,但在面對水庫大壩、特大橋梁等復雜工程時,具有效率低、勞動強度大的特點[2]。更重要的是人工檢查的方式存在很大的危險性,如圖 1、圖 2 所示。

圖1 借助皮劃艇拍攝裂縫

圖2 人工直接觀測
1.2 無人機巡檢
由于人工檢查的方式存在精度較低、危險較大等特點,因此,利用無人機的飛行特性對所需檢查建筑物的裂縫進行拍攝觀測的方式成為熱點,無人機巡檢方式多與計算機視覺結合,大量學者通過無人機采集裂縫照片的反饋,利用圖像處理技術設計算法,對裂縫進行識別定位。Magsino等[3]設計了一種基于無人機的裂縫快速掃描和識別算法,用于對橋梁表面裂縫的檢測。
然而,據目前市場了解,大多無人機帶有安全避障系統,如內嵌超聲波傳感器等方式。避障系統的可調距離為 1.5~3 m(默認為 3 m),即在距離無人機鏡頭前 3 m 若有障礙物,無人機為懸停狀態,無法前進,超聲波傳感器避障原理如圖 3 所示。此系統在多數應用場景下取得了較好的應用效果,但是在結構健康檢測領域,常常由于工程結構的限制,為無人機的拍攝巡檢帶來諸多問題。
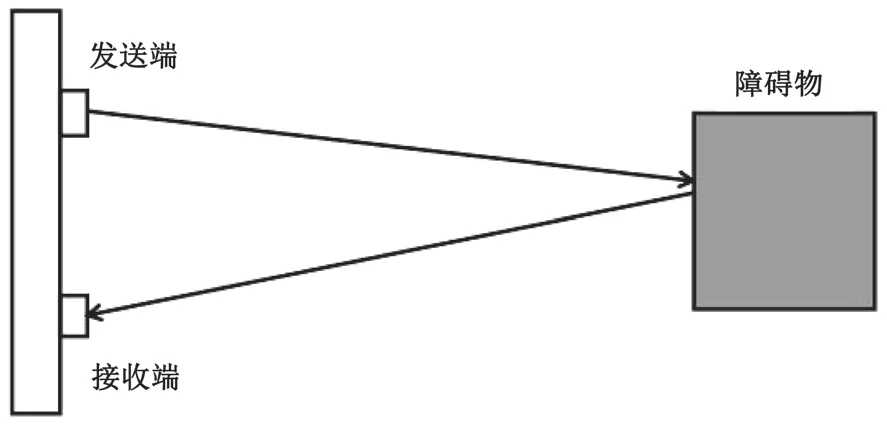
圖3 無人機超聲波傳感器避障原理
由于圖像記錄的內容大多具有不可重復性,一旦圖像質量有了問題,不僅降低觀察效果,更關鍵的是影響信息的獲得與提取。采集圖像與圖像處理相比,重要性絲毫不遜色,有時甚至要求更嚴格[4]。一方面,在拍攝以裂縫為主要背景的情況下,1.5~3 m 的安全距離無法實現對裂縫的準確拍攝,導致照片精度不高,如圖 4、圖 5 所示,不利于后續分析圖像信息工作的開展,可能會出現裂縫特征提取不完全、提取不準確等問題;另一方面,在不同時刻拍攝的過程中,無法保證每次鏡頭與裂縫的間距相同,為計算機圖像處理帶來不便。即使無人機飛行過程中關閉避障系統,雖然實現了近距離貼近建筑結構立面上的裂縫并進行拍照,但在很大程度上會因操作失誤而導致墜機意外。

圖4 采集照片清晰度較低
圖5 采集照片清晰度較低示意
綜上所述,采用無人機與計算機視覺結合監測裂縫的研究路徑是具有新穎性與前瞻性的,但是考慮到后期圖像處理涉及的圖像質量問題,有必要、也亟需研發一種能夠實現近距離、高質量采集裂縫照片的裝置與方法,以解決上述工程難題。
2 拍攝裂縫輔助裝置的設計分析
鑒于目前無人機拍攝裂縫的方式存在一定缺陷,為有效解決該技術問題,經實地調研和深入研究相關規范,設計研發了一種利用無人機實現近距離拍攝裂縫的裝置。該裝置結構設計巧妙,使用便捷,在保證過程安全可靠的同時,有效提高了采集照片的效率和清晰度。
山東省先后印發了《關于加強海水利用工作的意見》《關于加強污水處理回用工作的意見》等,加大污水處理回用、海水淡化等非常規水源的開發利用,納入區域水資源統一調度配置。在水資源論證與取水許可審批工作中,對污水處理再生水等非常規水的水量和水質能夠滿足建設項目用水需求的,優先配置使用非常規水,嚴格控制取用新水特別是地下水。
2.1 總體設計思路
基于對復雜工程中所出現的裂縫近距離拍攝且保證間距相同,本設計采用無人機加裝輔助裝置的方式,可以實現在關閉無人機避障系統下,通過裝置的保護與壓頂作用,將無人機最大近距離地緊貼墻壁裂縫,實現近距離拍攝的問題;同時,通過裝置上支架本身距離的恒定,起到距離標尺作用,保證間距相同,相較于軟件測距方式,該方法實現成本較低。
此外,在無人機本體上該裝置可以有效承受小型碰撞的沖擊以提升室內飛行的容錯性,保護無人機飛行期間的旋翼安全而不至于發生墜機事故。
2.2 結構組成設計
本裝置由兩個主要部分構成,即四旋翼無人機、支撐框架。其中,支撐框架由三個方向(豎向、橫向、頂端)的輕質桿件構成。裝置整體結構正、側視圖如圖 6所示。
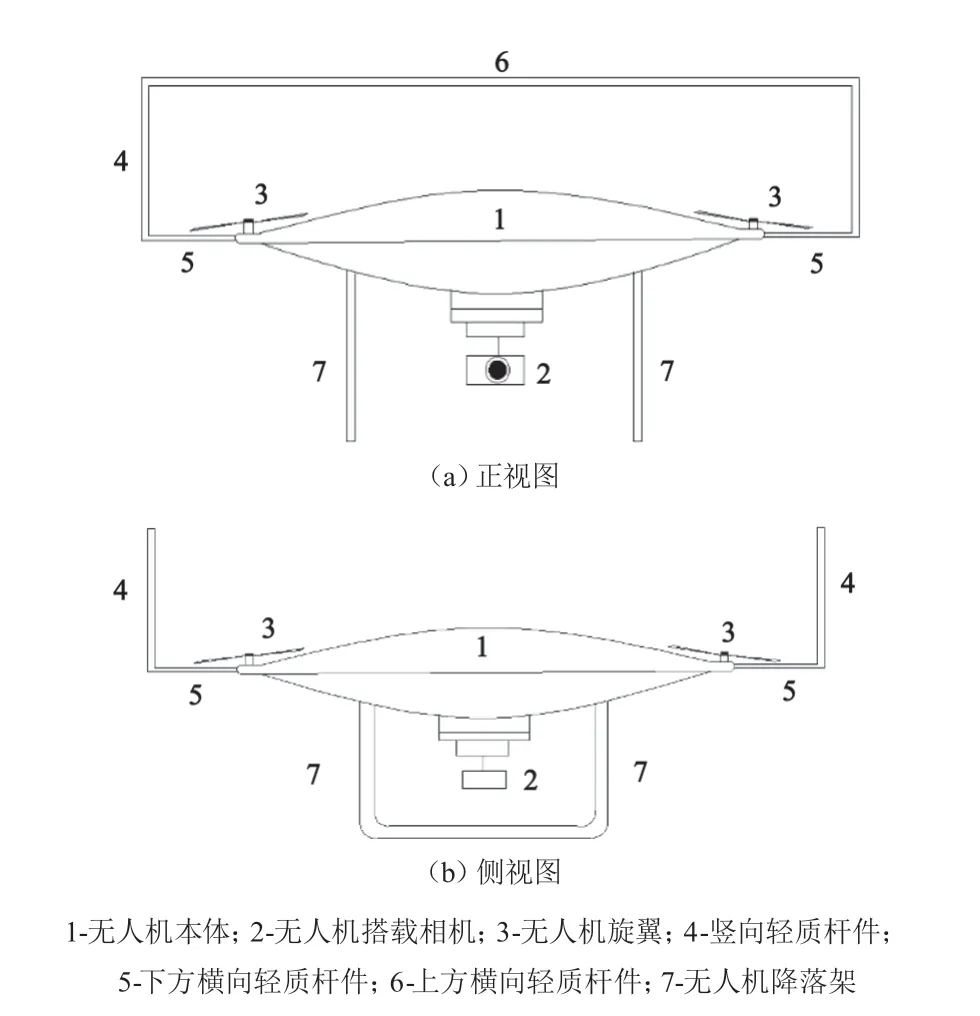
圖6 裝置總體結構圖
2.2.1 四旋翼無人機
對于四旋翼無人機本體而言,首要考慮的是飛行時無人機的載重問題。本裝置采用的無人機載重(不含自重)約為 4 kg。主要是基于:支撐框架結構重量為 1.4 kg,數量一對,以此保證無人機的各方向受力平衡,共計 2.8 kg。因此,本裝置的搭載總重量約為 2.8 kg,<4 kg,能夠滿足無人機的載重要求,不會對其升力產生影響,可以保證無人機的正常穩定飛行[5]。
2.2.2 支撐框架
橫向、豎向輕質桿件(4~6 號)相互焊接構成一對支撐框架。其中,桿件采用具有輕量化、強度大等特點的材料,使支撐框架具有足夠穩定性與柔韌性,避免與建筑結構立面發生碰撞后損壞。無人機在關閉 1.5~3 m 內的安全避障系統后,依靠下方橫向輕質桿件(5)、豎向輕質桿件(4)與上方橫向輕質桿件(6)構成的支撐框架,讓無人機機身在支撐框架的保護下,將無人機緊壓在墻壁上,減小了原先墻壁與無人機的間隔。
在結構設計時,為了保證無人機旋翼安全,設計時已經注意了下方橫向桿件的延伸距離,即安全距離。在加裝此桿件后,不會影響旋翼的轉動。
2.3 裝置操作方法
為方便工程技術人員更清晰地了解該技術并實施應用,本文總結了該無人機拍攝裂縫裝置的操作方法,步驟如下。其中,模擬示意如圖 7 所示。
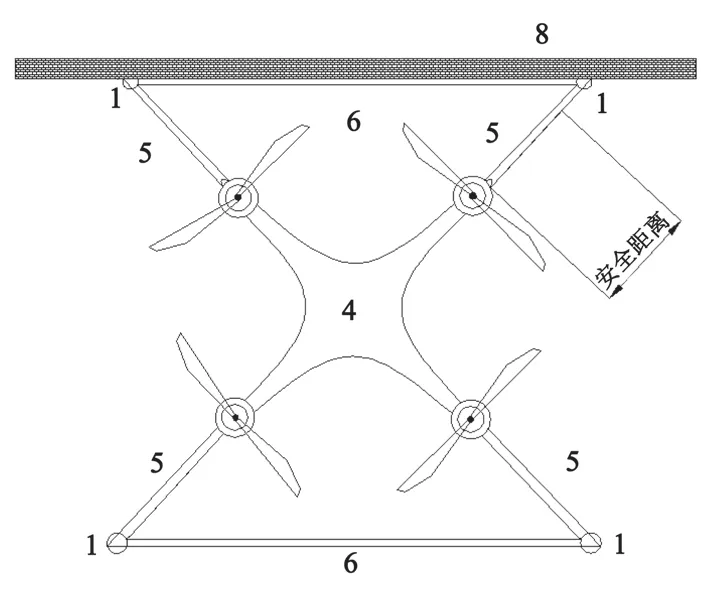
圖7 裝置使用模擬示意
2.3.1 前期準備
1)裝置檢查。檢查裝置的運行狀態,確認裝置是否運行正常;
2)安裝裝置。確認無誤后,將一對輔助裝置分別卡扣在四個無人機旋翼支點,以用來前后保持整體平衡。
2.3.2 拍攝過程
1)裂縫定位。啟動無人機,通過無人機的飛行,找到建筑物墻體上存在裂縫的區域,確認裂縫區域所在位置。
2)圖像采集。關閉無人機自身的安全避障系統后,加以觀察,然后緩慢飛行,在飛行過程中需要注意的是,由于無人機飛行的特性,機身會有微小角度的前傾。通過豎向輕質桿件與上方橫向輕質桿件逐步貼近裂縫所在結構立面,同時無人機鏡頭垂直于裂縫墻面對準裂縫所在區域,使得相機畫面盡可能覆蓋墻面上的裂縫信息。待機身穩定后,按下無人機自帶拍照鍵,獲取裂縫圖片。
3)當一個裂縫照片采集完畢后,將四懸翼無人機直線下降,遠離建筑結構立面,再小心水平飛行至下一個裂縫附近位置,然后,參照上述步驟完成其余所有裂縫的采集即可。
2.3.3 圖片分析
對采集的照片進行整理排布,通過計算機圖像處理軟件,如利用 Python 編程依次分析圖片中裂縫寬度方向上的像素個數與長度方向上的像素個數,根據像素尺寸進而推斷出裂縫的寬度與長度。
3 結論
針對復雜建筑結構立面,現有無人機拍攝裂縫的方式不能滿足后期精確的圖像分析要求而存在準確性和效率較低等工程難題,本文設計研發了基于圖像處理下的無人機拍攝裂縫的裝置,能夠克服現有方法的不足,具有以下優勢:
1)該裝置巧妙采用由輕質桿件組成的框架結構方式,減小了無人機鏡頭與立面上裂縫之間的距離,實現了無人機的近距離拍攝,大大增加所拍攝圖片的清晰度;
2)該裝置的支架中橫向輕質桿件充當標尺作用,可以保證不同時刻拍攝時,鏡頭與對象間距相同,可以確定圖片中像素的尺寸大小,進而推算出裂縫的寬度與長度;
3)該裝置相較于軟件測距方式,該方法實現成本較低、實現便捷,只需要將輔助裝置卡扣在無人機上即可實現。Q
