一種電機驅動機構的控制方法
2022-07-16 08:45:39馬鵬
科學與財富 2022年4期
關鍵詞:檢測
馬鵬



電機驅動的控制方法常規采用霍爾監測到位或者運行固定時間等,這些方法通用性不好,并且每次的驅動控制效果也不一致。
本方案設計一種滿足通用性、廣泛性使用需求的方法流程,實現多路徑、多條件的運行。過程中結合位置狀態監測、電流監測、過程計時監測等參數,按照組合判斷進行到位判斷,并且根據運行位置計算最優路徑,減少了總體的驅動電流消耗。同時可根據兩個甚至多個驅動機構的組合來實現各種規則和不規則運動的判斷和檢測。
組成框圖:
其中主控MCU為核心控制單元,進行算法分析及處理;計時單元是進行運行計時;控制信號是為外部輸入的控制電機運動的信號;電機驅動單元實現控制電機,實現電機正轉、反轉及剎車功能;位置狀態監測單元實現對運動閉鎖部件的實時位置檢測,并返回檢測狀態結果;電流監測單元實現運動閉鎖部件在運動過程中消耗的電流實時值;電機及機械機構為產品中的運動部件;運動閉鎖部件為最終的實現閉鎖功能部件。
附錄2:
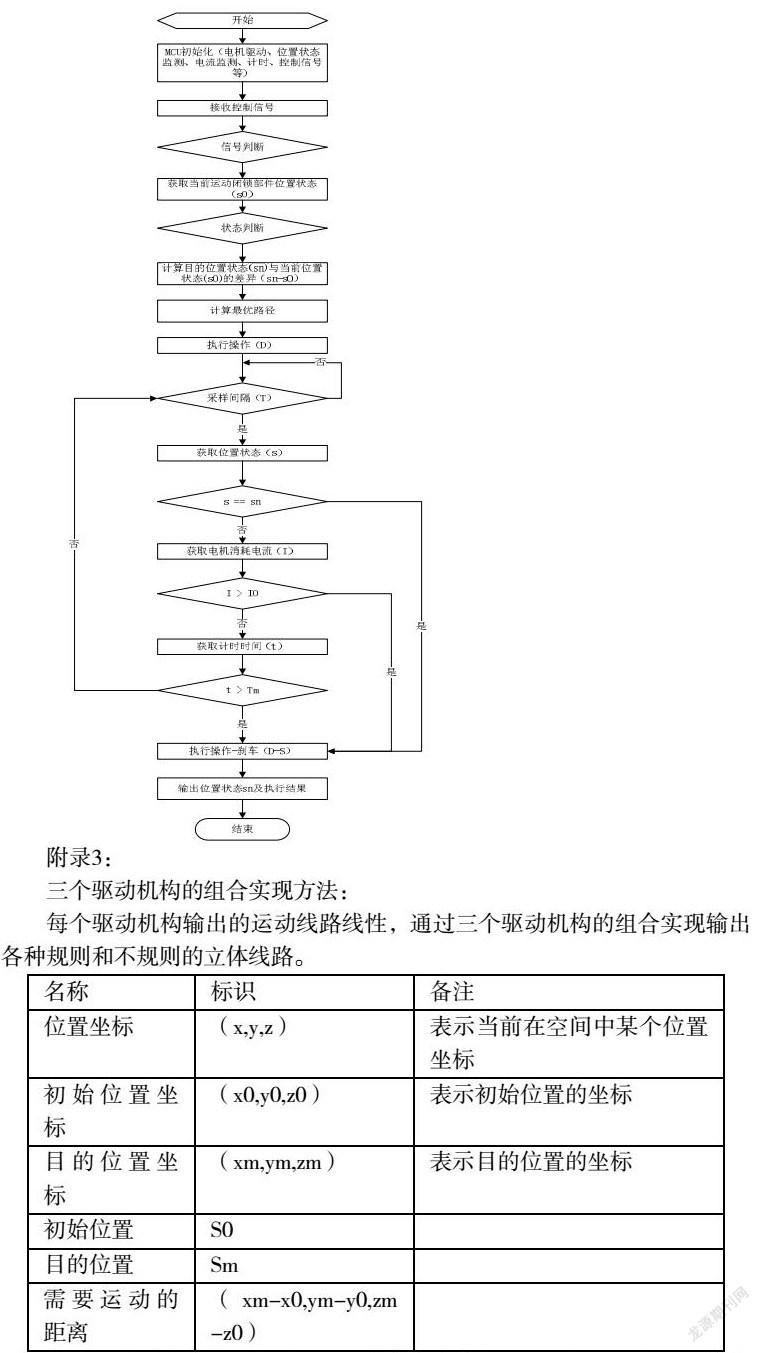
附錄3:
三個驅動機構的組合實現方法:
每個驅動機構輸出的運動線路線性,通過三個驅動機構的組合實現輸出各種規則和不規則的立體線路。
三個驅動機構組合疊加時,遍歷計算出每條軌跡的長度,并得出最佳軌跡路徑,并根據路徑確定每個驅動機構各自的到位判斷條件。當三個條件同時滿足時則說明運動到指定位置。這樣取消了對每個目的位置的位置檢測判斷,增加了機構的靈活度和運行空間。
如下圖:
可能的運行軌跡包括1-2-4,1-3,7-6-5等
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
