基于事件觸發機制的多智能體網絡平均一致性研究
2022-07-25 03:07:50楊宏
科教導刊·電子版 2022年14期
楊 宏
(武漢鐵路職業技術學院,湖北 武漢 430205)
0 引言
在智能系統的運用中,借助大量分布式配置的自治智能系統,通過網絡相互連接的形式構成復雜式大規模系統,該系統能夠對智能子系統進行綜合管理,從而保障各個子系統的高效運用。而關于事件觸發機制下的多智能體網絡的平均一致性,主要是對未必能夠進行全局集中控制的系統中,通過對多個智能體的網絡進行分布式的協調,讓其目標與行為能夠達到整體的理想狀態,從而保障主體系統下子系統智能狀態的一致性。該目標的一致性建設能夠優化各個智能體之間的相互作用規則,從而實現網絡的高靈活性與低成本性,其在協調調度領域、編隊控制領域以及同步問題與蜂擁問題解決領域上具備廣泛的應用價值。因此,本文基于事件觸發機制的多智能體網絡系統的平均一致性協議進行研究顯得尤為重要。
1 研究現狀
在多智能體網絡的運用背景中,平均一致性問題主要來源于管理與統計學的計算中,在多代理存在情況下的網絡一致性相關問題的研究中,Olfatisaber.R等人提出一種一致性控制協議理論框架與基本形式,同時對于平均一致性問題的可解性與控制算法,結合節點出入度及平衡的概念,給出了基于拓撲結構的多智能體網絡達成平均值的充要條件[1]。而對于拓撲結果平均一致性問題的中,當網絡系統抓取結構包含有向生成樹時,系統最終可以達到一致性,現有的解決策略涉及以下幾個方面:通過系統模型降維,隨機拓撲下的平均一致性;多代理拓撲下的平均一致性;不確定性拓撲和聯合關聯圖的平均一致性;以及多智能體網絡在任何強連接有向圖下的控制一致性。基于以往研究的成功性,本文優化了連續更新、周期和一致性協議的新方法,以減少系統穩定性下一致性控制協議的更新次數,從而實現相遇資源的有效節約,為實際的運用推廣提供一定的經濟價值與社會效益[2]。
2 事件觸發機制
在關于事件觸發機制下存在的多智能體網絡平均一致性的協議優化上,需要將連接的智能子系統通過采樣器與事件觸發器進行因果更換連,通過對控制器與執行器的銜接,以此實現智能體的狀態進行判斷,從而實現控制的精準到達。關注多智能體網絡存在的分布式事件觸發問題,需要建設智能體控制機制的更新迭代,以此節省智能體有限的計算資源,通過對于智能體自身信息與關聯智能體節點信息的采樣分析,間事件觸發時刻作為采樣時刻的子集,通過對觸發閾值進行計算,以此獲取周期觸發機制,同時對于練習事件觸發機制,需要連續事件能夠安裝相應的硬件時刻來對系統的狀態進行信息實現,同時對于連續事件的觸發機制進行復雜的排除線性事件,以此獲取觸發間隔的周期規律。而對于多智能體的控制規律的計算,需要由該個智能體自身及相鄰的幾點觸發信息進行計算,通過對一致性協議的要求進行連續或者周期性的控制。確定事件觸發機制下多代理網絡的平均一致性需要連續或周期性的更新控制規則,通過利用智能體與相鄰節點的觸發時刻信息的更新來減低平均一致性協議的更新次數,以此實現整體性能的優化[3]。
3 針對事件觸發機制中拓撲結構多智能體網路分析
3.1 事件觸發機制
在分析多代理網絡的一致性收斂性中,根據事件觸發存在的分布式機制,需要在平均一致性系統上,關注多智能體網絡的初始平均狀態計算,確保能夠逐漸一致性收斂,多智能體網絡的平均一致性只能在閉環系統逐漸穩定的情況下得到保證,而對于具有固定拓撲結構的多智能體網絡,如果器周期及事件觸發閾值能夠使得相應的線性矩陣不等式成立,那么其平均一致性收斂于初始狀態[4]。而考慮到多智能體網絡存在的切換式拓撲結構,需要對有限的連通圖進行描述,對事件觸發機制下多智能體網絡的拓撲結果進行隨機切換,通過對切換結構下的多智能體網絡平均一致性進行充分條件研究,選址合適的采樣周期和觸發法治讓線性矩陣能夠成立,確保多智能體網絡漸進一致性能夠收斂到初始狀態[5]。
3.2 仿真驗證
在觸發事件機制下,在網絡平均采樣周期和多智能體的觸發閾值的應用中,需要對事件觸發機制具備的固定于切換拓撲結構進行一致性仿真。在軟件的運用上需要借助 MATLAB軟件進行函數的采樣周期于觸發閾值的選取,由于式分布式事件觸發形式,那么對于智能體之間的觸發時刻式異步,即每一個事件觸發條件的變化時刻都是非周期性的,二軟件能夠對多智能體網絡的事件觸發次數預計控制規律進行對比分析,由數據現實可知智能體事件觸發次數遠低于采樣次數,由于各智能體一致性控制系以以及自身的領點觸發信息,能夠控制更新出書。由此可知多智能體的控制變化曲線,而智能體控制規律伴隨自身和鄰點觸發時刻進行更新,本文觸發事件即控制更新次數如表1所示:
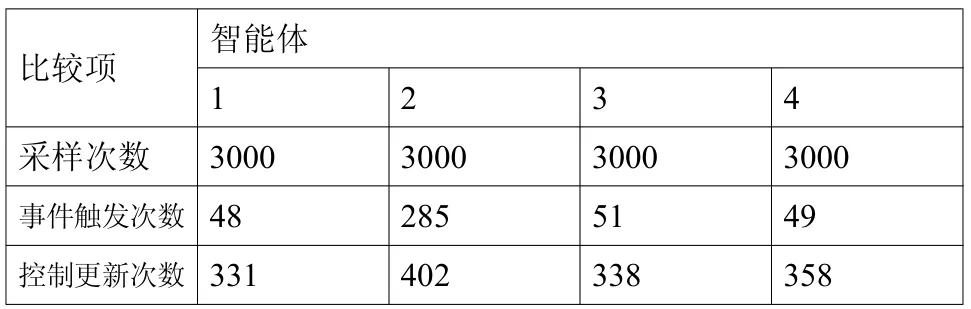
表1 多智能體網絡事件觸發次數及控制更新次數
由相應的數據結果可知,事件觸發控制模式的控制效果與之前的循環控制方法相似,這兩種方法都能保證多智能體網絡的平均一致性。然而,在以往的周期控制策略中,代理控制律更新的數量等于3000的樣本數量,遠遠高于事件觸發機制下的控制律更新的次數。綜上所述,基于分布式事件觸發機制的平均一致性協議,其保證了多智能體網絡,能夠在固定拓撲結構下的平均一致性,而分布式事件觸發機制,也能夠有效地減少了對多智能體一致性控制協議的更新次數。同樣,對于多智能體狀態響應,多智能體漸近收斂。在描述狀態差分向量范數的變化曲線中,多智能體網絡表現出平均一致的收斂性。多個代理的事件觸發矩,顯然觸發矩在代理之間是異步的,每個代理都是非周期的,其中三個拓撲隨時間隨機切換,代理事件觸發條件變化曲線,在每個事件觸發間隔內。切換拓撲下的多代理事件觸發器和控制律更新次數,每個代理的事件觸發器次數明顯低于樣本數。控制律更新的數量等于自己節點和鄰居節點觸發器,減去同時觸發器的數量,值得注意的是,拓撲切換后鄰居節點集也發生了變化。綜上所述,基于分布式事件觸發機制的平均驅動協議,能夠保證了交換拓撲下的平均一致性,而事件觸發機制優化,能夠有效減少了對多智能體一致性控制協議的更新次數,以此降低實際的運營成本[6]。
3.3 結果分析
通過對事件觸發機制下的多智能體網絡的一致性進行平均。一種基于代理自身的分布式事件觸發機制和鄰居節點信息的多代理平均一致性控制協議,以及一種基于代理自身和鄰居節點觸發信息的分布式事件觸發機制。與文獻中現有的連續或定期更新協議不同,基于事件觸發機制的平均協議只有在滿足事件觸發條件時才會更新協議,這有效地減少了對協議的更新次數。從理論上推導出了固定交換拓撲結構下多個智能網絡平均一致收斂的充分條件。仿真結果表明,在基于分布式事件觸發機制的固定和切換拓撲結構下,保證了多代理網絡的平均一致性,分布式事件觸發控制策略有效地減少了一致性協議的更新次數[7]。
4 結語
由此可見,對于事件觸發機制的多智能體網絡平均一致性進行研究分析,有助于組合形態下的智能體網絡進行分布式的協調,讓其目標與行為能夠達到整體的理想狀態,從而保障主體系統下子系統智能狀態的一致性。同時,平均一致性的建設,能夠優化各個智能體之間的相互作用規則,從而實現網絡的高靈活性與低成本性,為相關領域的運用提供保障。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:23:06
文苑(2018年21期)2018-11-09 01:22:32
燕山大學學報(2015年4期)2015-12-25 02:19:49
中國衛生(2015年9期)2015-11-10 03:11:12