基于RobotStudio的工業機器人虛擬仿真實驗平臺設計及實現
2022-07-28 09:26:52劉海燕唐滿賓
柳州職業技術學院學報 2022年3期
蘇 宇,劉海燕,唐滿賓
(廣西科技大學,廣西 柳州 545006)
0 引言
作為我國實施制造強國戰略的第一個行動綱領,《中國制造2025》提出“人才為本”的基本方針。為了主動應對新一輪科技革命與產業變革,支撐服務創新驅動發展,2017年教育部積極推進“新工科”建設,全力探索中國模式下的工程教育經驗,其中學生創新創業能力和技術技能能力的培養越來越受到人們的重視,其相關的實驗教學資源建設也越發重要。[1-2]工業機器人技術是智能制造中一項核心技術,越來越多的高等院校開設了相關的專業、課程等。[3-5]但由于工業機器人屬于一種較為昂貴的設備,地方高校,尤其西部地區的高校很難配備有完善的類似企業生產線中的工業機器人作業平臺作為實驗教學平臺,其配備的工業機器人技術實驗平臺更多的是數量有限的工業機器人單機。此外,初學者較容易發生工業機器人誤操作,尤其在配備了如工業相機等外設的實驗平臺上操作,容易導致工業機器人、外設受損。因此,結合數量有限的工業機器人實驗平臺開展虛實結合的實驗教學很有必要。[6-7]本文主要結合筆者所在學校已有的ABB工業機器人工作站設備,設計相應的工業機器人技術虛擬仿真實驗平臺,以及開展相關的實驗項目來展開研究。
1 設計思路
1.1 實驗課程分析
工業機器人技術實驗教學內容主要有工業機器人應用操作、工業機器人編程。“工業機器人應用操作”部分內容包括熟練掌握工業機器人的手動操作方法,理解工業機器人不同運動模式的區別,坐標數據與參考坐標系的關系,掌握搬運、碼垛、焊接等不同作業下工業機器人的應用配置、通訊模塊的配置等。[8-9]“工業機器人編程”實驗課程的內容包括熟悉ABB工業機器人編程語言的語法、數據類型、常用指令,掌握模塊化工業機器人編程的方法、了解不同工種作業下的編程等。
由于設備臺套數有限,以筆者授課班級48人為例,每個實驗項目一般5人一組,輪流使用一個實驗平臺,這導致在正常的每次實驗課堂內,每名同學平均的實驗時間不超過30分鐘。這將導致學生在應用操作部分,僅能基本熟悉掌握示教器的使用等基本操作方法、通信配置、常見編程指令、編程實例等,對于運動模式的區別、坐標數據與參考坐標系的關系等需自行觀察數據變化的實驗,以及模塊化編程等需要較長實驗時間的實驗,其實驗效果總體不佳。另一方面,不同的生產作業工種,其工業機器人技術有較大區別,如信號配置、功能選項配置、專用功能函數等,現有的機器人設備很難配置齊全不同工種的功能模塊以及相應外設。
基于現有實驗室硬件資源以及實驗教學效果,本文的工業機器人技術仿真實驗平臺及項目設計主要針對以上不足進行。
1.2 虛擬仿真實驗平臺模塊開發
結合工業機器人技術實驗教學的兩大部分內容,虛擬仿真實驗平臺整體以三大模塊進行設計,包括工業機器人的基本操作模擬模塊、坐標系與末端工具位置數據理解模塊、不同生產工種作業模擬模塊。
1.2.1 工業機器人基本操作模擬模塊
該模塊主要包括兩個子模塊:示教器模擬仿真模塊和寫字模塊。工業機器人的示教器是工業機器人與人機交互的主要部分,包括各種工業機器人操作、編程等都需要示教器實現。因此,示教器模擬仿真模塊是整個平臺的基礎核心,ABB工業機器人的虛擬仿真運動、控制等核心的算法主要包含于此模塊。[10]示教器模擬仿真模塊主要是模擬真實的示教器操作界面,包括手動操作選項、ABB工業機器人控制搖桿等,通過此仿真模塊,給學生提供進行示教器界面菜單認識、手動運動模式的選項設置、搖桿控制運動等認識驗證類實驗。該類實驗要求學生在進入實驗室進行工業機器人現場實驗前完成,對工業機器人示教器界面菜單、手動操作方法等有一定認識后方可進行實物實驗,以提高實驗室內的課堂實驗教學效果。
第二個子模塊寫字模塊,為學生提供進行基礎的示教編程、工業機器人運動應用實驗以及軌跡離線編程實驗等仿真平臺。基于實驗有趣性的目的,該模塊屬于開放性的模塊,學生可自行設計自己的名字或者其他圖形軌跡模型,加載到仿真模擬實驗平臺進行示教軌跡編程、自動獲取軌跡編程等。[11-12]
1.2.2 理解工業機器人坐標系與末端工具位置數據模塊
工業機器人其關鍵數據的構成及意義理解是學習好工業機器人編程的一個重要前提。該模塊旨在給學生提供一個能便于觀察不同坐標系下,不同類型位置數據的變化及變化規律,以及其他重要數據的實時變化過程的虛擬仿真平臺。該模塊包括一個固定坐標尺度模型平臺以及實驗數據顯示模塊。
1.2.3 生產應用模擬平臺
常見的工業機器人應用主要有焊接作業、搬運作業、碼垛作業、涂膠作業等,[13]在生產制造中,由于作業對象、生產工藝等有別,工業機器人的程序設計有較大的區別,如焊接機器人需使用焊接指令、準確的工具數據,搬運機器人作業程序需要嚴格遵循與外設信號邏輯順序等。基于不同工業機器人應用場景,本工業機器人技術虛擬仿真實驗平臺在生產應用模擬模塊設計立體倉庫模擬模塊、物料出庫模擬模塊、焊接作業變位模擬模塊、傳送帶模擬模塊、工具支架模擬模塊、拓展模塊六個子模塊。
該模塊主要為學生提供模塊化編程、工業機器人綜合應用技術等虛擬仿真模型環境。物料出庫子模塊模擬生產中的物料出庫以及傳輸到工位;立體倉庫仿真模塊模擬生產中存放待加工工件立體倉庫;焊接作業變位模擬模塊模擬可變位的焊接工件夾裝工位臺架;傳送帶模擬模塊模擬工件傳送帶;工具支架模擬模塊模擬不同作業末端工具的支架;拓展模塊主要由棋盤工件臺及堆放平臺組成,模擬搬運目的點位以及碼垛工件存放格。
2 虛擬仿真實驗平臺實現方法介紹
2.1 虛擬仿真實驗平臺開發環境
虛擬仿真實驗平臺其中一個基本的原則是便于學生實驗使用,即使在課外也能方便地進行自主實驗,因此,本虛擬仿真實驗平臺是基于微軟Windows操作系統環境下,利用計算機進行仿真實驗。基于實驗室現有工業機器人為載荷3公斤的ABBIRB120工業機器人,本虛擬仿真實驗平臺的開發以ABB公司RobotStudio編程軟件為開發環境,其開發軟件環境可快速搭建ABB工業機器人模型及控制系統,降低虛擬仿真平臺的開發成本。應用場景模型利用三維設計軟件Solidwork進行設計。
2.2 工業機器人基本操作模擬模塊
基本操作模擬模塊以RobotStudio編程軟件快速搭建的IRB120工業機器人模型以及控制系統為原型,控制系統選項增加了DeviceNet Master/Slave、PROFINET Device兩種常見的工業網絡協議,以及Application Spot Welding工藝包選項。為結合現有工業機器人實驗平臺進行虛實結合實驗教學,在仿真平臺設計一個1795mm*1326mm規格實驗臺架模型。
寫字模塊屬于開放模塊,為方便初學者通過工具末端TCP點進行示教,設計了筆狀末端,學生也可根據自己的興趣愛好設計一個平面軌跡的模型加載到寫字模塊,以進行示教編程實驗及自動獲取軌跡編程(仿真實驗界面見圖1)。
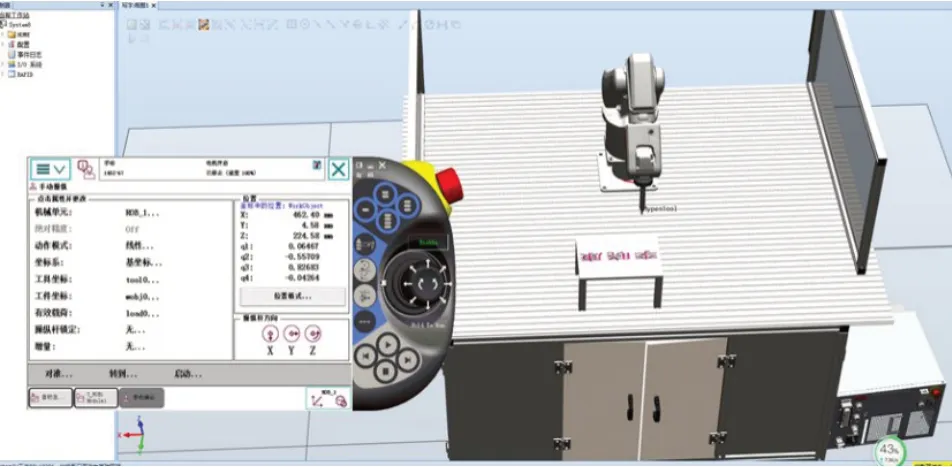
圖1 虛擬仿真示教器手動操作界面及寫字模塊
在該仿真模塊下,學生可進行常用的軌跡運動指令示教編程實驗,理解不同運動指令以及每項相關參數的意義,也可根據仿真平臺中的軌跡模型進行ABB機器人自動獲取軌跡離線編程的實驗(如圖2所示)。
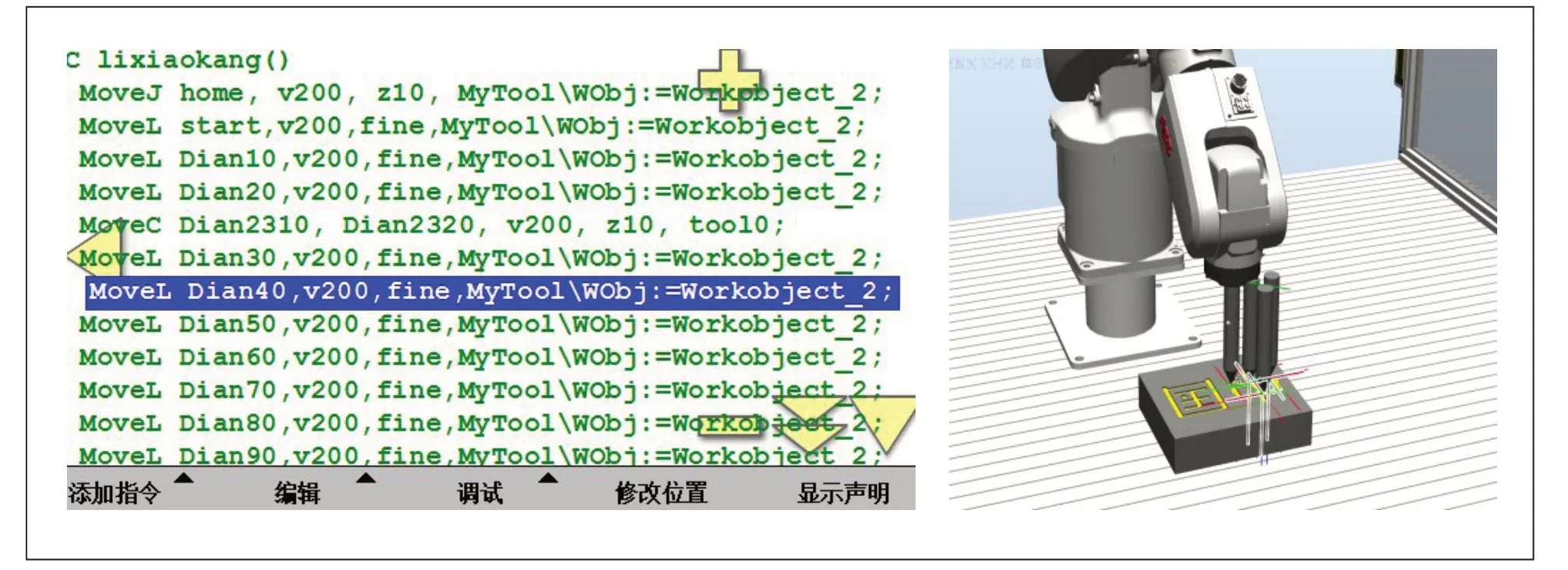
圖2 運動指令編程、末端軌跡姿態仿真
2.3 工業機器人坐標系與末端工具位置數據理解模塊
本模塊主要設計一個類似棋盤有固定刻度線的工件模型,并利用ABB提供的軟件工件開發包(SDK),利用軟件開發平臺Visual Studio2015及C#編程語言開發ABB工業機器人關鍵數據實時顯示軟件,在學生進行工件坐標系、工件坐標系的定義、不同類型位置數據定義等實驗時,方便學生觀察目標位置數據的變化規律,便于理解各種數據之間的關聯與意義等。ABB工業機器人關鍵數據實時顯示軟件開發建立在軟件與虛擬仿真實驗平臺后控制器的TCP/IP的連接,并獲得數據讀取權限,其部分關鍵代碼如表1所示,仿真工具平臺及數據實時顯示軟件界面如圖3所示。
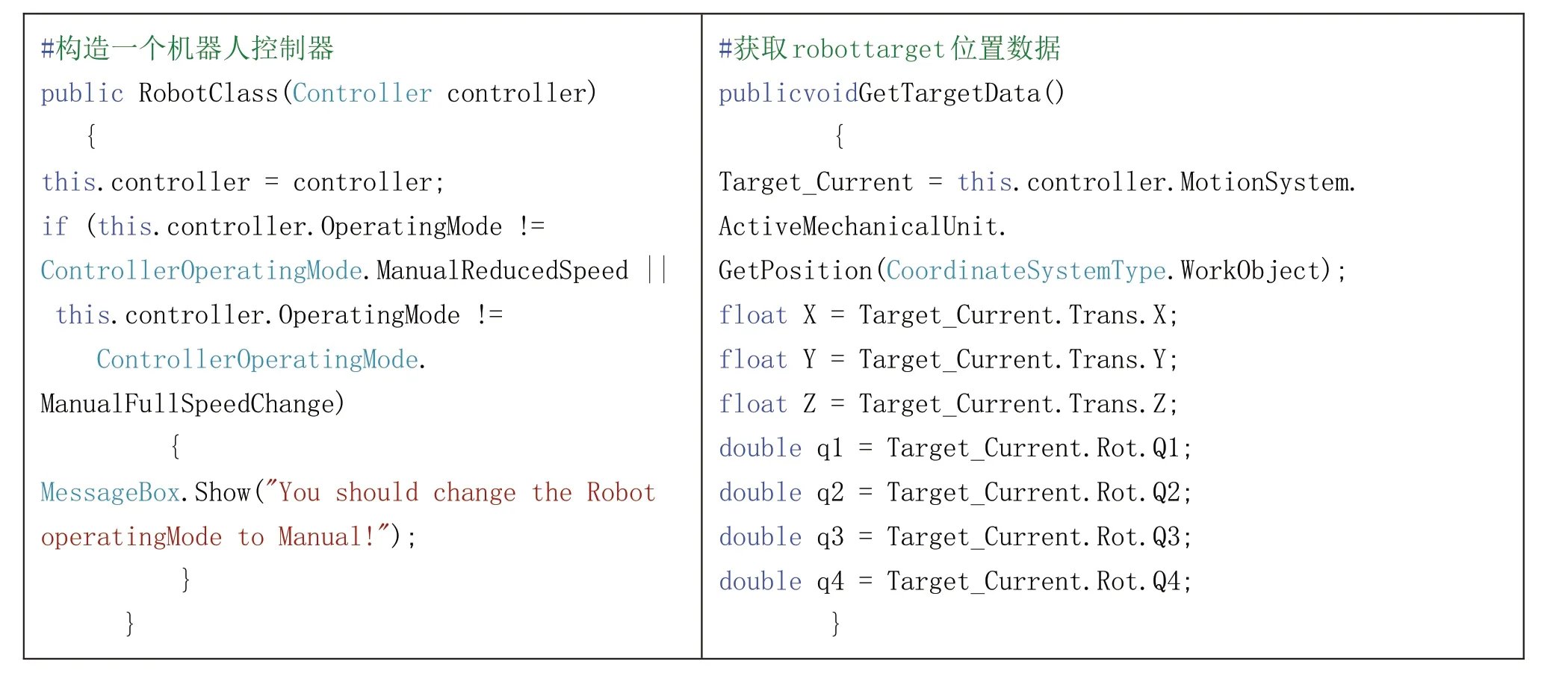
表1 Visual Studio軟件部分代碼
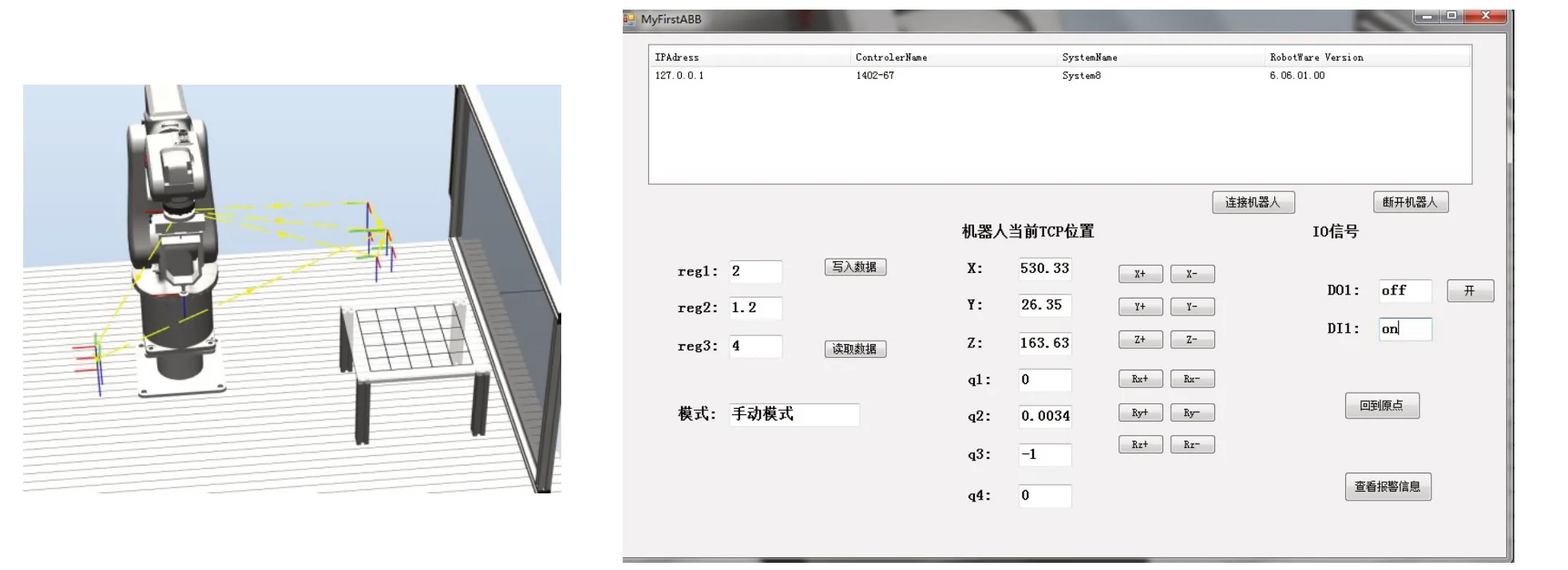
圖3 仿真工具平臺及數據實時顯示軟件界面
2.4 生產應用模擬平臺
生產應用模擬仿真平臺針對焊接作業、搬運、碼垛三大常見工業機器人作業種類設計了六個三維仿真模擬模塊:設計立體倉庫模擬模塊、物料出庫模擬模塊、焊接作業變位模擬模塊、傳送帶模擬模塊、工具支架模擬模塊、拓展模塊。其三維模擬模型利用Solidwork三維軟件進行設計開發。焊接作業模擬實驗要求學生能通過示教編程把模擬工件從模擬立體倉庫模塊中取出,并準確放置焊接作業變位模擬模塊,進行焊接作業的工業機器人編程。搬運作業仿真模擬實驗要求學生完成搬運工件自動取、放模塊程序,根據物料出庫模擬信號、工件傳送帶模擬模塊到位信號完成搬運作業編程。碼垛作業仿真模擬實驗要求學生完成從拓展模塊中取出工件,并根據碼放要求把工件碼放到棋盤模塊的資產格子中。在生產應用模擬平臺中,設計有4個末端工具及末端工具支架,不同的作業模擬實驗需要完成取工具、完成具體作業、放工具三道工序,學生可根據作業的模擬工序進行模塊化編程實驗。
為實現工業機器人模擬仿真實驗中的仿真動作效果,如在模擬搬運作業中,當工業機器人末端工件TCP點到達工件吸取位置,并執行吸取信號指令后,模擬工件應能吸附到工業機器人末端工具TCP上。根據以上設計的實驗任務,本實驗平臺利用RobotStudio開發環境提供的Smart組件定義了模擬信號、仿真模型動作關聯設計與開發(如圖4)。生產應用模擬實驗平臺如圖5所示。
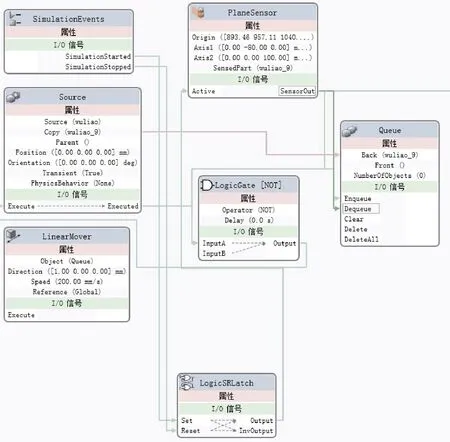
圖4 搬運作業模擬仿真動作設計
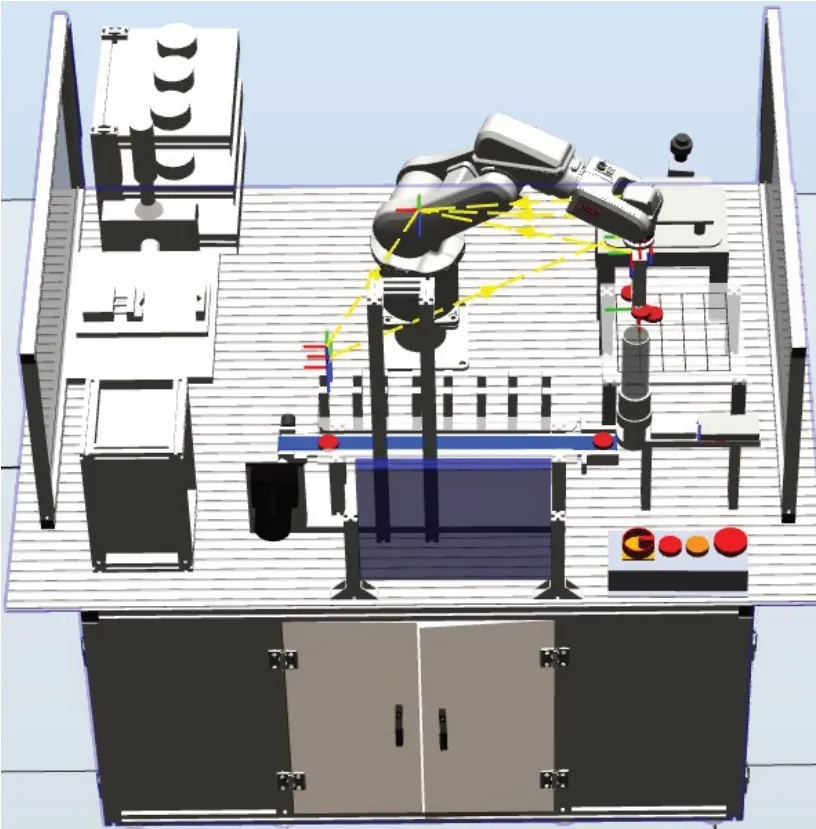
圖5 生產應用模擬實驗平臺
3 結語
工業機器人虛擬仿真實驗平臺是基于現有工業機器人設備臺套數不足,學生實驗中誤操作容易引起設備損壞,利用現有設備在進行編程實驗時對關鍵數據結構及意義不易理解等背景下開發,其主要目的是根據工業機器人應用技術實驗教學內容、實驗課程目標等,開展虛實結合的實驗教學活動。從已開展的相應教學活動效果分析,學生利用自己的計算機或實驗室計算機進入虛擬仿真實驗平臺進行虛擬仿真實驗,可幫助學生快速了解實驗設備操作界面、方法,可直觀地觀察關鍵數據的變化等,幫助他們理解相關數據的結構及意義。不同應用模塊的模擬幫助他們理解、掌握不同應用的機器人編程。此外,該虛擬仿真平臺模塊化的開放結構,為學生提供創新性、設計性的實驗平臺,例如,機械工程機器人方向的學生可結合已學的三維建模技術設計搭建機器人應用仿真場景,進行設計性綜合實驗。仿真實驗平臺基于實驗室設備進行開發,因此,也可很好地支持虛實結合的實驗教學模式。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
兒童故事畫報(2013年3期)2013-06-24 05:40:30