一種防空裝備全被動作戰定位方法
2022-08-02 07:50:18張夢駿藺紅明
航天控制 2022年3期
關鍵詞:設備
劉 博 張夢駿 付 磊 高 雅 藺紅明
上海機電工程研究所,上海 201109
0 引言
防空裝備全被動作戰是指系統在不向外輻射電磁波、激光等能量的情況下完成對目標的搜索跟蹤及打擊攔截。隨著電磁干擾技術、精確打擊技術的快速發展[1],傳統防空裝備以雷達等有輻射信號設備為主要探測、制導手段的作戰方式已無法適應當前復雜的戰場環境。面對反輻射導彈以及電磁干擾的威脅,采用光電設備進行探測、制導的全被動作戰樣式,可以有效提升防空裝備在電子戰中的作戰能力及效果。
光電探測設備通過目標輻射熱或者可見光實現對目標的搜索跟蹤,不受電磁干擾影響,不向外輻射能量,極大提升了武器裝備的隱蔽性。同時光電探測設備還具有測角精度高、目標識別能力強的優點,在探測低空目標時,不受地雜波影響,不存在多路徑效應[2]。
行進間作戰技術可以進一步提升防空裝備武器系統作戰性能,實現武器裝備快速、機動作戰,極大提高了系統自身的生存能力,還能為機械化部隊提供不間斷的伴隨防空能力,提升防空裝備性能。
在全被動行進間作戰時,防空裝備一般采用單車作戰,且光電探測設備只能測量目標角度信息,無法獲取目標的距離信息,如何通過單光電設備探測的純角度信息對目標進行快速、精確的定位,是全被動作戰的一項關鍵技術。
鄭晟等對光電設備在防空武器系統中的應用進行了深入的分析和研究,證明了光電設備應用于防空武器裝備的有效性[3],但是未能分析全被動作戰場景;管旭軍等利用UKF技術,改進無源定位算法,實現了純角度信息下的目標快速定位[4],但是算法較為復雜。本文針對防空裝備全被動行進間作戰場景下的目標定位問題,基于單光電設備角度測量,提出了先采用α-β-γ濾波算法減小角度觀測誤差[5],再用遞推最小二乘算法求出目標初始位置、目標速度,進而解算目標實時位置的方法[6]。仿真結果表明,遞推最小二乘算法可有效對目標進行定位,采用α-β-γ濾波算法提前對角度濾波的方法可以提高目標定位算法的收斂速度,提高目標定位精度。
1 定位模型及算法原理
1.1 定位模型建立
圖1所示為測量裝備與目標之間的相對運動關系。以開始進行定位時測量裝備的位置為坐標原點O,建立北天東地理坐標系,X軸為北向,Y軸垂直水平面向上,Z軸指向測量東。
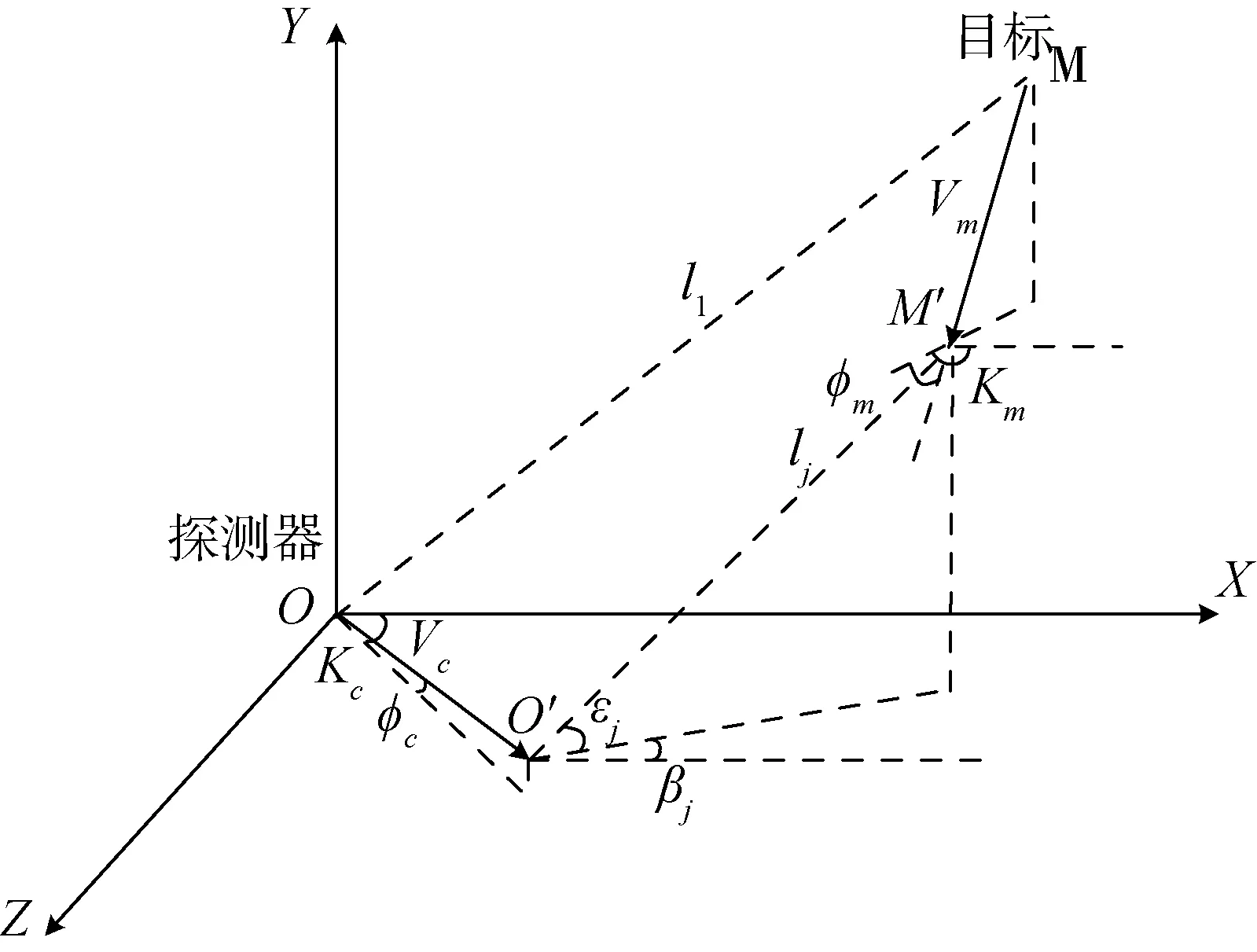
圖1 測量裝備與目標相對運動關系示意圖
其中:Kc為光電測試設備航向角,Vc為測試設備行駛速度,φc為測試設備行駛方向與水平面夾角)。針對勻速直線運動目標,Km為目標航向角,Vm為目標飛行速度,φm為目標俯沖角。在目標探測初始時刻(t1),光電測試設備與目標距離為l1,俯仰角為ε1,方位角為β1。在任意時刻tj,光電測試設備與目標距離記為lj,光電測試設備測得目標俯仰角為ε1,方位角為β1。
根據圖1中目標相對運動關系,對空間幾何封閉圖形OO’M’M從X軸、Y軸和Z軸3個方向分別進行分析,可獲得以下方程:
(1)
簡化可得:
(2)
其中:Xcj為光電測試設備到tj時刻在X方向移動距離,Ycj為Y方向移動距離,Zcj為Z方向移動距離;Vmx=VmcosφmcosKm,Vmy=Vmsinφm,Vmz=VmcosφmsinKm。
1.2 定位算法原理
通過式(2)計算可得:
Vmztj[cosβj+sinβjsinεj]+Vmxtj[cosβjsinεj-sinβj]-
Vmytjcosεj+l1[cosε1sinεjcos(βj-β1)-
sinε1cosεj-cosε1sin(βj-β1)]=Zcj[cosβj+
sinβjsinεj]+Xcj[cosβjsinεj-sinβj]-Ycjcosεj
(3)
實際上,俯仰角ε1、方位角β1為測量值,存在測量誤差,因此式(3)左右兩邊無法完全相等,tj時刻誤差Δ(tj)可記為:
Δ(tj)=Vmztj[cosβj+sinβjsinεj]+
Vmxtj[cosβjsinεj-sinβj]-Vmytjcosεj+
l1[cosε1sinεjcos(βj-β1)-sinε1cosεj-
cosε1sin(βj-β1)]-Zcj[cosβj+sinβjsinεj]-
Xcj[cosβjsinεj-sinβj]+Ycjcosεj
(4)
根據t1,t2,…,tj觀測值,構建目標極小化函數:
(5)
對極小化函數分別對Vmx,Vmy,Vmz和l1求偏導,并令結果為0,計算并簡化可得:
(6)
其中:
Aj=tj(cosβj+sinβjsinεj);
Bj=tj(cosβjsinεj-sinβj);
Cj=-tjcosεj;
Dj=[cosε1sinεjcos(βj-β1)-sinε1cosεj-
cosε1sin(βj-β1)];
Fj=Zcj[cosβj+sinβjsinεj]-Xcj[cosβjsinεj-
sinβj]+Ycjcosεj。
令Xk=[VmzVmxVmyl1]T,式(6)可寫為:
H(k)Xk=F(k)
(7)
其中:F(k)=[F1F2…Fk]T,
針對存在觀測噪聲的實際情況,采用遞推最小二乘法解算式(7),可得遞推公式為:
(8)
K(k)=P(k-1)H(k)[HT(k)P(k-1)H(k)]-1
(9)
P(k)=[I-K(k)HT(k)]P(k-1)
(10)
(11)
2 觀測值預處理算法
采用遞推最小二乘估計進行計算時,算法沒有考慮估計量與觀測量的統計性質,未根據觀測值、估計值的統計信息對計算函數加以限制。在觀測值測量誤差較大的情況下,算法會產生較大誤差,影響收斂速度,甚至產生發散。針對光電探測信息存在較大誤差的情況,本文對測試值進行濾波預處理,減小探測方位、俯仰角的隨機干擾誤差,剔除大幅度毛刺,提高輸入數據的正確性。
考慮到實際作戰過程中運算的簡便性、穩定性,采用α-β-γ濾波對觀測的俯仰角ε1,方位角β1進行濾波平滑處理,減小光電設備的測量誤差,剔除毛刺。α-β-γ濾波作為Kalman濾波的一個特例,由于不涉及矩陣計算,計算方法簡單,數據計算量小,穩定性高,應用在多型防空武器設計中,顯示濾波數據有較高的準確性[8]。
當n=1時,
(12)

預測值為:
(13)
新息為:
ΔS(n)=S(n)-S(n|n-1)
(14)
濾波值為:
(15)
(16)
其中:Δt為前后兩輸入點對應時間差,Nw為觀測點數,α(n),β(n)和γ(n)為增益系數。
假設標定的光電探測設備測量角度誤差為δ,則當ΔS(n)>3δ時,認為S(n)為野值,令ΔS(n)=0。
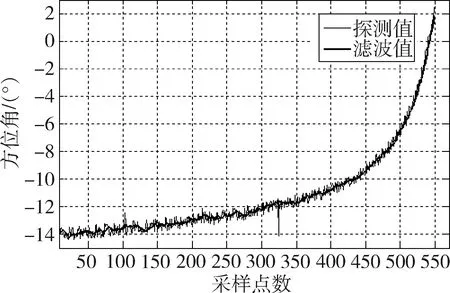
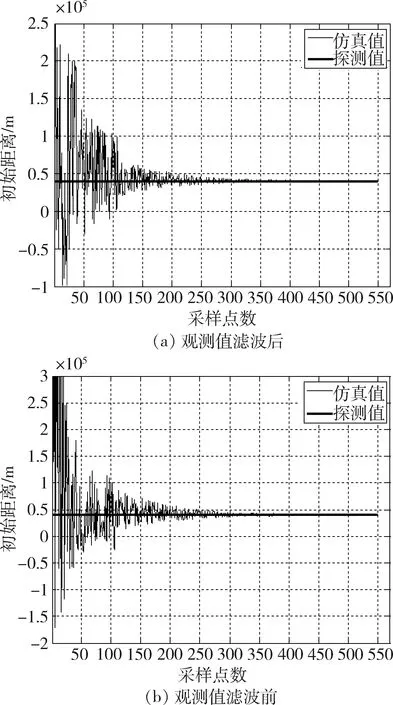
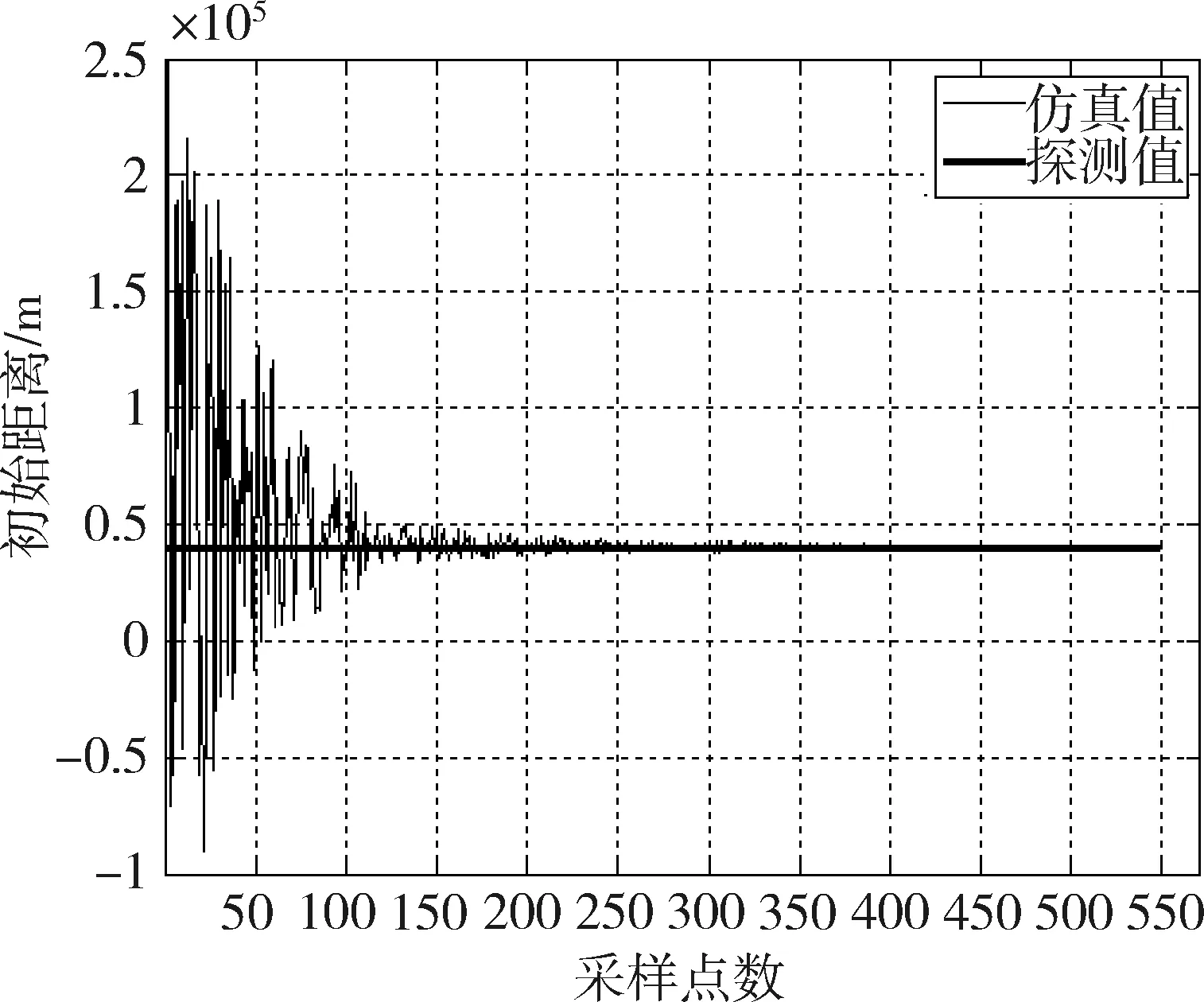
當n>Nw時,令n=Nw,計算方法與1 第1、2節分別對定位算法原理、觀測值預處理算法進行了分析,結合防空作戰裝備實際作戰過程,設計了采用單光電設備探測進行目標定位的算法流程,如圖2所示。 圖2 單光電設備被動定位解算流程 防空裝備進入行進間作戰,通過光電探測設備對目標進行搜索,發現目標后,將探測到的目標相對戰車的方位角、俯仰角發送給指控系統,指控系統采用α-β-γ濾波算法,分別平滑方位角、俯仰角,剔除野值。對處理后的方位角、俯仰角采用最小二乘迭代算法進行解算,計算目標的初始距離及各方向速度,隨后根據裝備的初始位置、目標速度及時間,解算目標的當前位置,完成目標定位。指控系統根據目標信息解算各項所需要的參數。 采用本文提出的算法對數據進行仿真分析。仿真數據如下:探測器初始位置為(0,0,0)m,速度為(2,0,2)m/s,加速度為(0.1,0,0.1)m/s2;目標初始位置為(40000,8000,-10000)m,速度為(-330,-30,100)m/s,無加速度。探測器采樣周期為0.5s,角度測量誤差為0.5°。考慮到探測器實際跟蹤目標過程中會出現不穩定情況,加上了一定量的干擾誤差。 由圖3所示,通過α-β-γ濾波處理探測器觀測值,可以有效平滑觀測數據,降低探測值的隨機誤差,對于添加的幾個孤立的野值,也進行了有效剔除。 圖3 目標方位角觀測值及濾波值 圖4為通過遞推最小二乘算法解算的目標初始值,其中,圖4(a)為對探測器觀測方位角、俯仰角進行濾波后解算的目標初始值,圖4(b)為未對觀測值進行濾波處理時解算的目標初始值。 從圖4(a)可以看出,采用遞推最小二乘算法可以有效解算目標初始距離。隨著觀測點數不斷增加積累,解算的目標距離與真實值越來越接近。當采樣點達到250個點(125s)時,解算出的目標初始距離基本穩定,與實際距離的誤差可以減小到10%以內,從而實現在全被動作戰下對目標的定位。 同時,對比圖4(a)與圖4(b)可以發現,通過α-β-γ濾波對探測器觀測值進行濾波,可以提高解算的目標初始值的收斂速度及解算精度,進一步提升作戰能力。 圖4 觀測值濾波前及濾波后解算的目標初始距離 通過前面算法可以發現,通過遞推最小二乘算法解算目標初始距離時,定位速度、定位準確度有所欠缺。在前面仿真條件基礎上,只將探測器加速度(0.1,0,0.1)m/s2增加到(0.15,0,0.15)m/s2,再進行計算,圖5為仿真結果數據,可以看到,解算的目標初始距離在收斂速度及收斂精度上都有一定程度的提高。 圖5 增加探測器加速度后解算的目標初始距離 單站定位技術對防空裝備全被動作戰起著至關重要的作用[9]。本文通過理論推導,獲得了遞推最小二乘算法,通過仿真,發現該算法可有效解算目標初始距離,定位精度及定位速度能滿足防空裝備作戰需求,且該算法簡單,運算便捷,可為防空裝備在行進間全被動作戰提供有效支撐,具有較強的工程應用性。此外,本文采用α-β-γ濾波對探測器的探測值先進行濾波處理,可有效平滑探測數據,剔除毛刺,提升了遞推最小二乘定位算法解算的精度及收斂速度。3 單光電設備被動定位方法

4 仿真試驗與結果分析
4.1 觀測值濾波處理
4.2 觀測值濾波處理
4.3 其它
5 結束語
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00