分布式電動汽車驅動力分配控制方法研究*
2022-08-04 07:20:22彭曉燕邢星飛崔慶佳
汽車工程 2022年7期
彭曉燕,邢星飛,崔慶佳,黃 晶
(1. 湖南大學機械與運載工程學院,長沙 410082;2. 中汽研汽車檢驗中心(天津)有限公司,天津 300300)
前言
分布式電動汽車憑借其傳動效率高、四輪獨立可控和驅動系統固有的冗余特性等優勢,近年來得到學術界和工業界的廣泛重視。然而,分布式電動汽車在不同行駛工況和環境下,仍會發生跟蹤誤差。尤其當車輛高速行駛時,由于輪胎的縱向力與橫向力相互耦合,導致輪胎的側向力無法滿足汽車轉彎需求,進而車輛發生失控、側滑等危險。同時,驅動電機長期受到過熱、過壓等因素的影響,容易出現故障甚至完全失效,從而導致車輛產生不良的橫擺力矩。若不及時采取有效的控制,其行駛動力性、穩定性與安全性將受到嚴重影響。因此,驅動電機正常與故障下的主動安全控制,是確保車輛安全穩定行駛的有效途徑,也是當前分布式驅動技術的研究重點。
針對分布式電動汽車正常驅動下的穩定性控制,Yu等為改善車輛行駛時瞬態、穩態響應下的操縱性能,在控制系統中引入了狀態反饋控制,對四輪驅動力重新分配。該方法可實現瞬態響應快、穩態誤差小的要求,但采用前后軸平均分配橫擺力矩,難以使四輪分布式驅動系統(4WDDS)的性能達到最優。Li 等針對帶有四輪獨立轉向的分布式電動汽車,提出了一種分層控制結構,分別基于比例控制與最小二乘法對驅動電機、轉向電機執行器進行分配控制,仿真結果表明提高了車輛橫擺角速度跟蹤精度。Ren等則采用整體式結構,利用模型預測控制算法并結合電機輸出能力、路邊附著條件等約束,對四輪驅動力與主動轉向角進行優化分配。但考慮到驅動電機正常工況下,四輪驅動力分配便可產生足夠的橫擺力矩,以維持車輛橫向穩定,若仍采用協同轉向會提高控制的復雜程度。
分布式電動汽車也可以利用驅動源固有冗余特性,在單/多電機出現故障的情況下,通過驅動力分配的控制方式來確保車輛行駛安全性。周洪亮等設計出一種基于障礙李雅普諾夫函數(BLF)的容錯控制方法,通過選取BLF 來約束車輛橫擺速度和側向速度,對車輪轉矩進行重新分配,來確保車輛狀態始終處于穩定域內。Lee 等提出具有跛行模式和電子穩定控制的容錯方法,即考慮到故障同側驅動電機輸出能力的限制,通過降低對側電機力矩來維持車輛穩定性。但以上分配方法是通過降低速度和加速性能來提高安全性,在一定程度上會降低車輛的動力性,不符合駕駛員的控制意圖。為此,Luo 等為補償所需側向力和橫擺力矩,提出驅動和轉向系統協調控制的方法,將驅動電機故障下的控制分配問題簡化為帶約束的非凸目標規劃問題,并利用KKT條件來優化求解。
上述研究可以提供很好的借鑒,但現有分布式驅動車輛驅動分配方法針對驅動電機正常與故障工況下的一體化操縱穩定性控制不多;且較少考慮故障工況下驅動電機的輸出能力,可能無法產生足夠橫擺力矩以維持車輛穩定。據此,本文中提出一種適用于驅動電機正常與故障工況下的一體化協調分配控制方法。首先以橫擺角速度和質心側偏角為控制變量,基于滑模控制理論,設計橫擺力矩加權跟蹤控制器;同時依據駕駛員的期望車速計算總的驅動力;在分配層,當四輪正常驅動時,考慮到驅動力分配便可產生足夠橫擺力矩,將車輛穩定裕度作為目標函數對驅動力優化分配;當驅動電機發生故障時,考慮驅動電機的飽和約束,采用前輪主動轉向和驅動力重構的協調控制方法,實現車輛操縱穩定和動力性多目標最優控制。
1 分布式電動汽車動力學模型
汽車動力學模型是驅動力分配控制策略研究的關鍵,為此搭建了車輛2 自由度參考模型與車身剛體模型,便于后續控制器設計。同時依據車輛動力性能指標對驅動電機進行參數匹配設計,最終聯合Carsim軟件搭建出分布式電動汽車動力學模型。
1.1 車輛2自由度參考模型
為了探究車輛操縱穩定性的基本特征,一般采用簡化后的線性2 自由度模型進行分析研究。忽略懸架等對車輛運動的影響,只考慮車輛在水平面上的運動,研究車輛的橫擺與側向運動。建立的2自由度參考模型如圖1 所示,進而推導出期望橫擺角速度和期望質心側偏角的表達式。
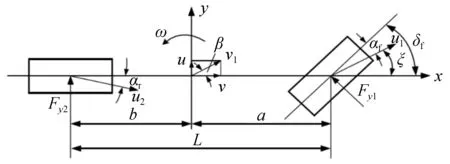
圖1 車輛2自由度參考模型
其中,車輛側向、橫擺方向運動微分方程可表示為
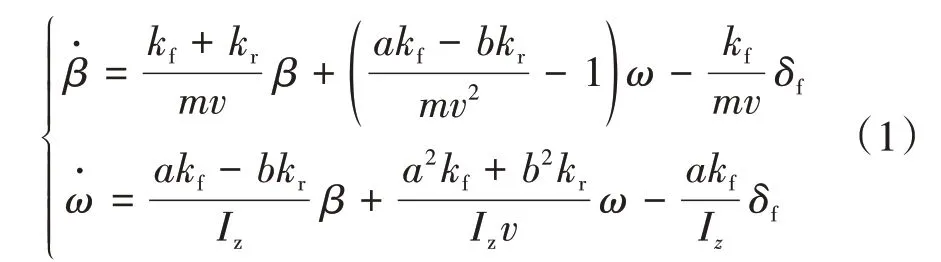
式中:為整車質量;、分別為車輛質心到前后軸的水平投影距離;I為車輛橫擺轉動慣量;為車輛的縱向車速;、分別為車輛橫擺角速度與質心側偏角;、分別為車輛前后軸側偏剛度;F、F為輪胎的側向力。

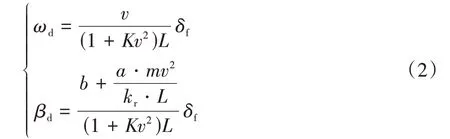
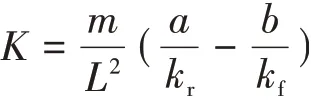
從車輛穩定性角度考慮,應避免車輛發生側滑,過大的車輛質心側偏角會增加車輛失穩的可能性。因此,有不少文獻將理想的質心側偏角設定為零。故期望橫擺角速度與質心側偏角分別為
1.2 車身剛體模型
為了分析車輛驅動行駛時的受力情況,并制定相應驅動力分配控制策略,本文中建立了如圖2 所示的車身剛體模型。在驅動力分配控制中,四輪驅動力與附加橫擺力矩間的關系式可表示為

式中:F(=1-4)為各驅動電機產生的驅動力;為作用于車身的附加橫擺力矩值;為輪距。


圖2 車身剛體模型
1.3 驅動電機模型
輪轂電機作為分布式電動汽車的動力裝置,其相關特性直接影響車輛的驅動控制效果,目前大多數研究采用簡化的電機模型,即按照電機外特性曲線輸出驅動轉矩。本文在文獻[15]的基礎上,依據動力性能指標:最高車速160 km/h、百公里加速時間小于12 s、最大爬坡度30%,來計算電機的峰值轉矩、額定轉速等相關參數。具體計算過程不再贅述,其中驅動電機外特性曲線如圖3所示。

圖3 驅動電機外特性曲線
當驅動電機發生故障時,電機的實際輸出轉矩將與期望輸出轉矩不同,主要故障形式可分為部分故障、完全故障兩種情況。為了方便表示驅動電機故障造成的影響,引入故障因子,此時電機輸出轉矩與期望轉矩間的關系為

式中:λ為故障因子,λ= 0 表明該驅動電機發生完全故障,0 < λ< 1 時表明驅動電機部分故障;T和T′(=1-4)分別代表4 個驅動電機輸出轉矩的期望值與實際值。
結合驅動電機的輸出能力,驅動力的可達范圍可表示為

2 驅動力分配控制策略
為解決分布式電動汽車不同工況下的安全穩定行駛問題,設計分別面向四輪正常驅動與驅動電機故障下的分配控制架構(圖4)。首先依據行駛車速偏差基于PID控制計算總縱向力,結合橫擺角速度、質心側偏角偏差分別設計M、M控制器,并構建加權模塊求得附加橫擺力矩。其次在分配層分別建立基于目標函數和約束條件的最優分配數學模型,并利用二次規劃法進行優化求解。其中,若驅動電機發生故障且受限于同側電機輸出能力,導致車輛無法繼續跟蹤期望軌跡,則利用協同前輪轉向的方式維持車輛安全穩定行駛。

圖4 分配控制策略架構圖
2.1 橫向運動控制器設計
橫向運動控制器的控制目標是保證車輛的質心側偏角在較小范圍內波動,并使橫擺角速度盡可能地跟蹤期望值。同時兩者之間又存在耦合關系,而單一的跟蹤期望橫擺角速度或質心側偏角難以達到良好的控制效果,因此需要將控制變量進行加權處理。
2.1.1 基于橫擺角速度的M控制器設計
在質心側偏角處于較小范圍時,為使車輛更好地跟隨駕駛員轉向需求,應使橫擺角速度的實際值和期望值偏差盡可能的小。本文利用滑模理論對控制器進行設計,因此定義偏差e=-并定義滑模面為

式中為橫擺角速度偏差系數,且> 0。
將式(1)代入式(8)并求導得
本文選擇指數趨近律來逼近滑模面,即

式中、為指數趨近律系數,且> 0,> 0。
聯合式(9)和式(10),可得

2.1.2 基于質心側偏角的M控制器設計


式中為質心側偏角偏差系數,且> 0。
將式(1)代入式(12)并求導得
同理選擇指數趨近律來逼近滑模面,即

式中、為指數趨近律系數,且> 0,> 0。
聯合式(13)和式(14),可得
2.1.3 滑模控制穩定性分析
定義李雅普諾夫函數為

基于橫擺角速度的M控制器穩定性分析:

基于質心側偏角的M控制器穩定性分析:


2.1.4 橫擺力矩加權設計
在對橫擺力矩控制量加權之前,由于切換函數為sgn()符號函數,在滑模面上下切換時具有不連續性特點進而產生抖振,為此,選擇飽和函數來代替符號函數:
式中:為滑模厚度;代表s與s。
在車輛穩定性控制中,橫擺角速度和質心側偏角對車輛的橫向動力學控制都至關重要,同時兩者之間存在耦合關系,因此本文結合相平面的相關理論設計加權控制模塊。當車輛處于穩定域內時,主要選擇跟蹤車輛橫擺角速度,便可滿足跟蹤期望路徑需求;當車輛介于穩定域與危險域間時,M控制器應及時參與避免車輛偏向危險域;當車輛處于危險域時,應首先借助M控制器使車輛恢復穩定。設M的權重系數為,且< 1,則
最終可得加權橫擺力矩表達式:

2.2 縱向運動控制器設計
在車輛驅動控制中,車速是表征車輛動力性的重要參數,也是駕駛員直接可以控制的變量,在駕駛過程中駕駛員總是希望可以跟隨期望車速。因此,可以根據駕駛的加速踏板行程來識別期望車速,并基于實際車速和期望車速求解出總的縱向力,最終結合橫向跟蹤控制模塊將最優力矩分配到各個執行器。
為降低整車控制系統難度,提高控制系統的可靠性,使用PID 控制對總縱向力求解計算,數學表達式為

式中:()為實際車速與期望車速的偏差,即() =-;、、分別為PID 控制器中的比例系數、積分系數、微分系數。
2.3 驅動力分配控制策略
2.3.1 驅動電機正常工作下的驅動力分配控制
驅動力分配主要依據計算的總縱向力與橫擺力矩需求,結合優化目標將控制量分配給4 個驅動電機,同時需要考慮各項約束條件的限制。在車輛正常行駛時,輪胎發生側向力飽和是造成失穩的重要原因之一,因此本文將側向裕度作為優化目標函數:

車輛在行駛過程中面臨著多維的條件約束,在此將橫擺力矩與縱向力需求作為等式約束,同時需要考慮驅動電機容量、路邊附著條件等約束,整理可得約束條件:
式中:、分別代表電機的最小與最大輸出轉矩;為輪胎有效半徑;為路面附著系數;F(=1-4)為各輪胎垂直載荷。
2.3.2 驅動電機故障下的驅動力分配控制
由于正常驅動下的控制分配是基于剛性的等式約束進行求解,在驅動電機故障或驅動力飽和時,可能出現無可行解的情況,因此本文首先將驅動電機故障下的優化目標函數進行重新設置,將等式的強制性約束進行松弛,轉化為盡可能滿足車輛橫擺穩定性與動力性的控制目標;其次考慮驅動電機容量約束、附著條件等不等式約束,進而實現對四輪驅動力的優化求解。
故驅動電機故障下驅動力最優分配數學模型可表示為包含優化目標函數與約束條件的關系式:
式中:為縱向力與橫擺力矩的權重系數矩陣;和分別為式(25)對應的系數矩陣與狀態矩陣。
控制變量為4個車輪的驅動力:

2.3.3 驅動電機故障下協同前輪轉向分配控制
驅動電機發生故障時,驅動力重新分配會導致故障同側車輪的電機輸出轉矩增大,若執行器過飽和并令其強制輸出峰值轉矩,電機會在短時間內燒毀或自動降低轉矩輸出;并且由于驅動電機發生過飽和,僅通過驅動力分配將無法產生足夠的橫擺力矩,車輛仍會偏離期望軌跡;因此,當驅動電機達到其輸出限制時,考慮協同前輪轉向的方式進行分配控制。
同理,采用指數趨近律來設計滑模函數,并利用加權模塊進而求得附加橫擺力矩:

同樣將式(31)的等式進行松弛,轉化為式(32)的以橫擺穩定性和動力性的控制目標,并綜合驅動電機容量約束、前輪轉角附加范圍和路面附著不等式約束,進而實現對四輪驅動力與前輪轉向角的優化求解。因此,驅動電機故障下協同前輪轉向分配控制器的優化目標函數′與約束條件′為
式中′和′分別為式(32)對應的系數矩陣與狀態矩陣。
控制變量為4 個車輪的驅動力與前輪附加轉向角:

2.4 基于二次規劃的優化分配求解
分布式電動汽車驅動力分配算法的求解本質就是一個帶約束的優化問題,其中有基于神經網絡或生物啟發式算法等優化算法,但這些算法一般運算量大,對于車輛控制器的實時性具有較大影響。因此本文采用基于二次規劃的優化求解方法,實時處理效果較好,滿足驅動力分配的應用要求。其中基于二次規劃的關系表達式為

式中:為最優目標函數變形處理后的實對稱矩陣;為二次規劃中一次項的向量;分別為不等式約束的系數矩陣和右端的列向量;、分別為等式約束的系數矩陣和右端的列向量;l、u分別為控制量的下限、上限約束。
由此,將驅動力與主動轉向角控制分配轉化為帶約束的最優化問題,按照式(37)的格式整理目標函數與約束條件,利用Matlab 中的quadprog 函數即二次規劃求解的方法可計算得出執行電機的最優控制量。
3 仿真驗證
為驗證本文設計的驅動力分配控制策略的效果,基于Carsim 和Simulink 搭建聯合仿真模型并進行仿真分析,其中Carsim用于提供整車動力學模型、控制策略和優化分配算法在Simulink中實現。同時為了更好地對比仿真效果,將總驅動力平均分配到4 個車輪的方式定義為平均分配,將按照上述策略構建的分配方式定義為優化分配,對不同工況進行比較,來驗證優化分配的控制效果。車輛主要參數如表1所示。

表1 車輛主要參數
3.1 四輪正常驅動時優化分配仿真分析
首先針對四輪正常驅動時的工況,車速設置為90 km/h,道路附著系數為0.85,在第2π 秒給轉向盤施加幅值為45°、周期為2π 的正弦轉角來模擬轉彎行駛工況。平均分配、優化分配控制下車輛響應的仿真結果如圖5~圖8所示。
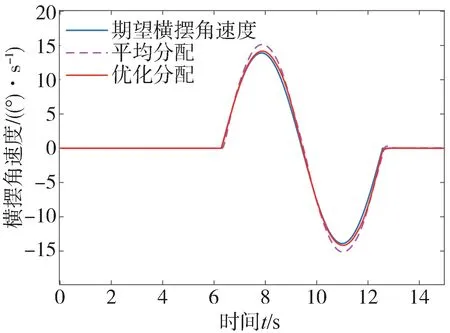
圖5 車輛橫擺角速度曲線
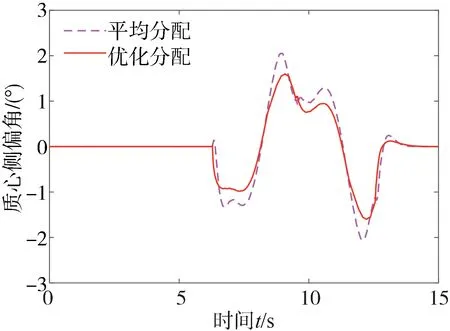
圖6 車輛質心側偏角曲線
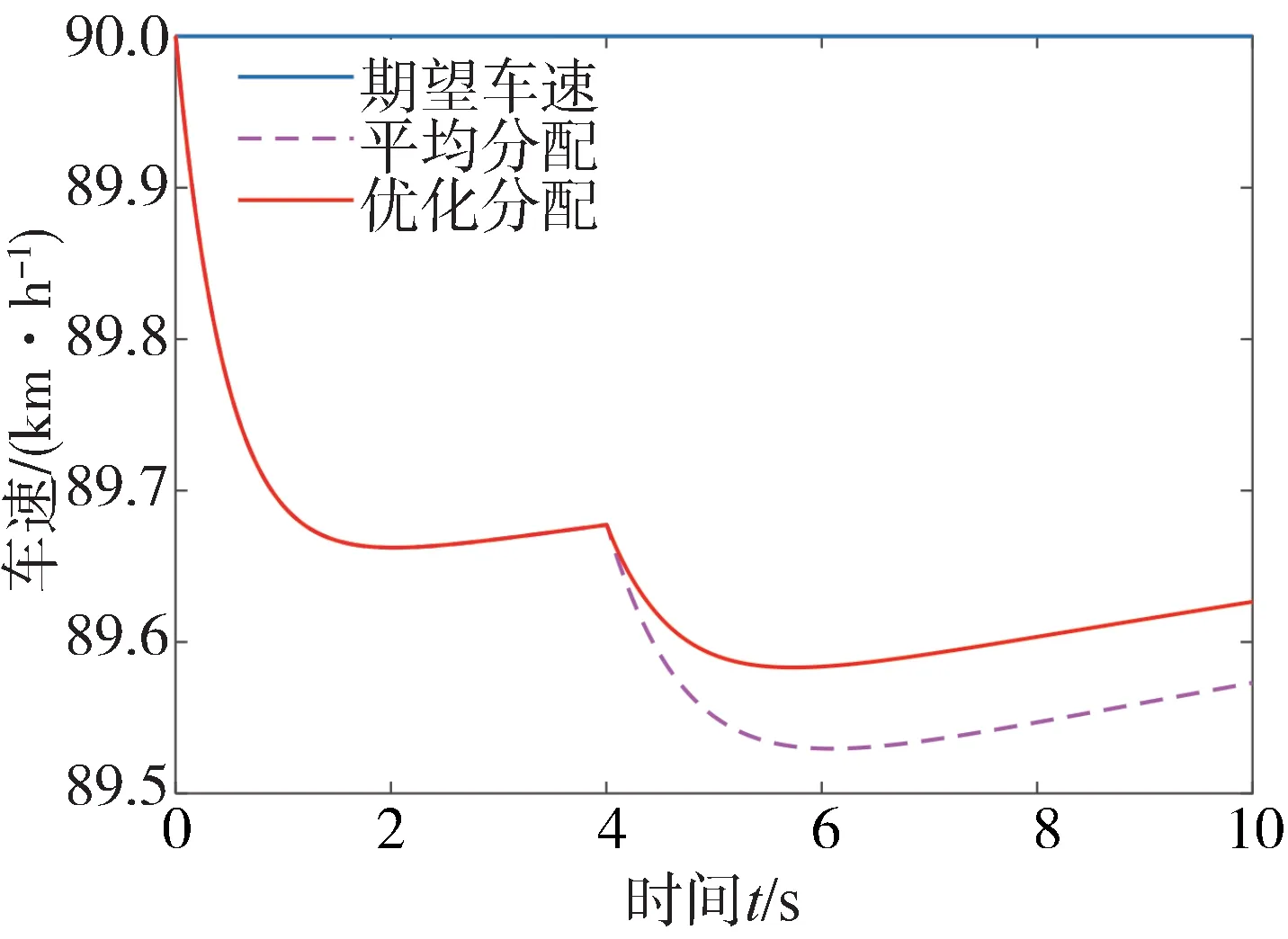
圖8 車輛車速變化曲線
由圖5和圖7可以看出,在仿真過程中四輪驅動轉矩平均分配會產生橫擺角速度誤差,并且無法減小誤差值;而在優化分配方法中,可以通過控制左右側車輪驅動轉矩來維持車輛橫向跟蹤能力,同時質心側偏角維持在穩定范圍內,優于平均分配。由于縱向力采用等式約束,兩者車速均在期望值附近。

圖7 四輪驅動轉矩變化曲線
3.2 驅動電機故障下協調控制仿真分析
3.2.1 驅動電機故障下直線行駛協調仿真分析
針對直線行駛下驅動電機發生故障的工況,車速設置為110 km/h,道路附著系數為0.85,轉向盤始終保持0°來模擬直線行駛。仿真設置第4 s 左前輪發生完全故障,第7 s 右后輪發生50%故障,仿真結果如圖9~圖12所示。
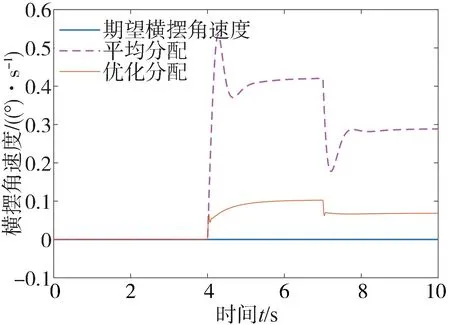
圖9 車輛橫擺角速度曲線
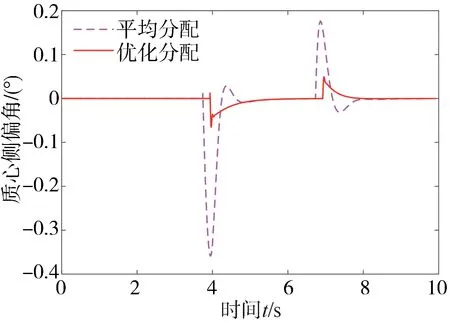
圖10 車輛質心側偏角曲線
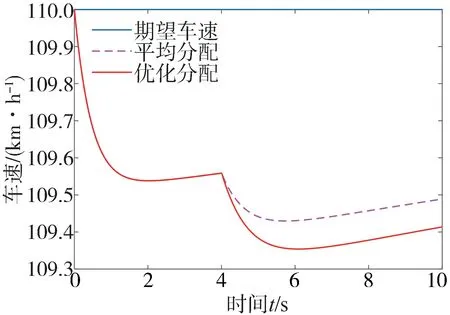
圖12 車輛車速變化曲線
由圖9和圖11可以看出,在第4、7 s電機出現故障導致車輛偏離期望軌跡,故障同側電機增大轉矩輸出使得橫擺角速度和質心側偏角迅速收斂到期望值附近;由于滑模厚度設置為0.1,所以橫擺角速度誤差值均保持在0.1(°)/s 內。將縱向力與橫擺力矩等式約束松弛后,車輛仍能較好跟蹤理想車速,并未出現動力性明顯下降。
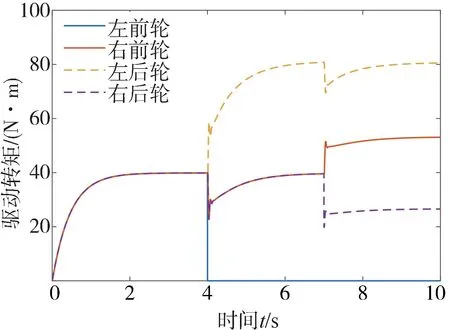
圖11 四輪驅動轉矩變化曲線
由于4 臺電機均未出現輸出飽和,故直接采用驅動力分配的方式完成了控制重構。
3.2.2 驅動電機故障下轉彎行駛協調仿真分析
針對轉彎行駛下驅動電機發生故障的工況,車速設置為110 km/h,道路附著系數為0.85,在第π秒給轉向盤施加幅值為45°、周期為2π 的正弦轉角信號來模擬車輛轉彎行駛。仿真設置第5 s 左前輪完全故障,仿真結果如圖13~圖17所示。
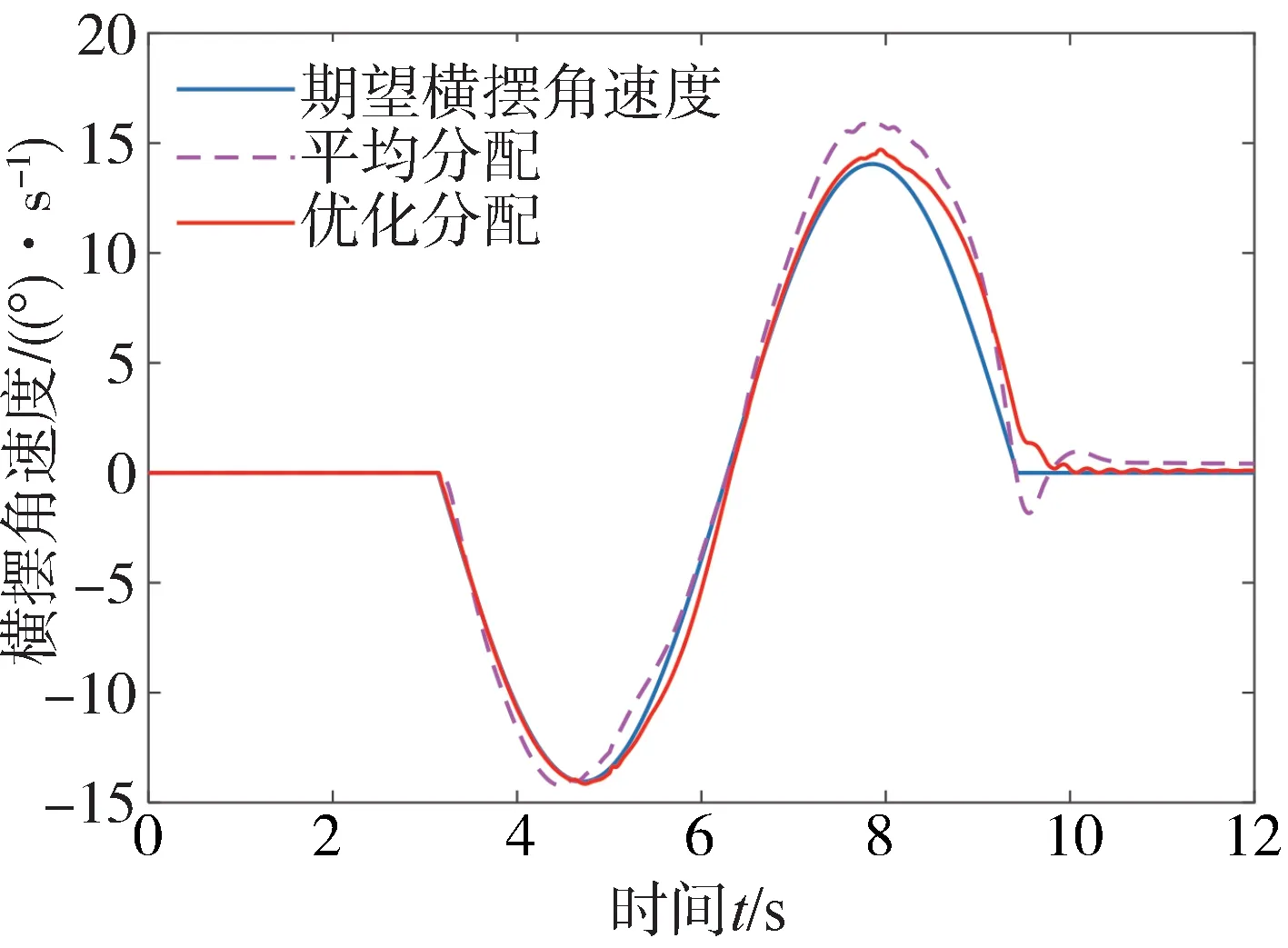
圖13 車輛橫擺角速度曲線
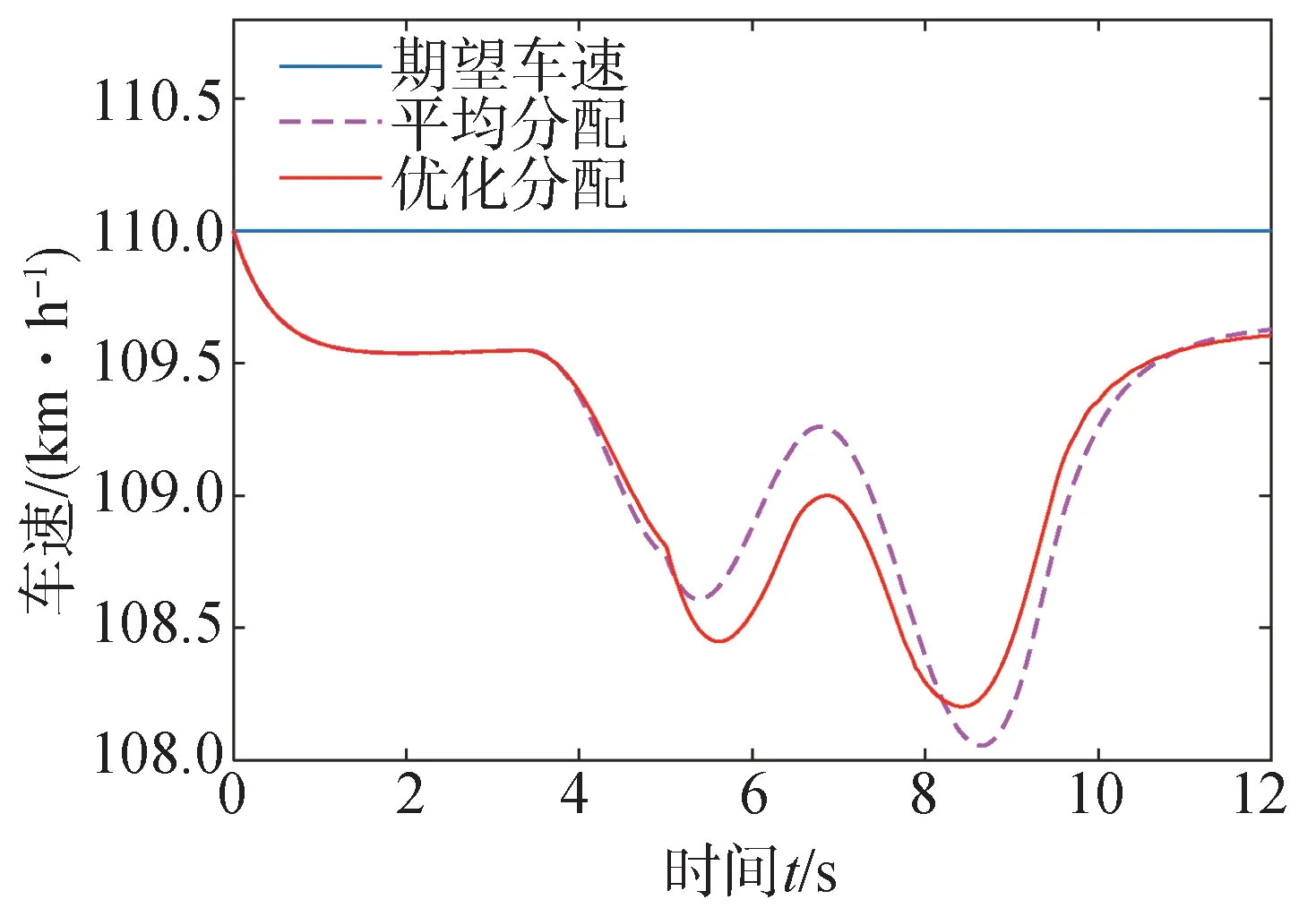
圖17 車輛車速變化曲線
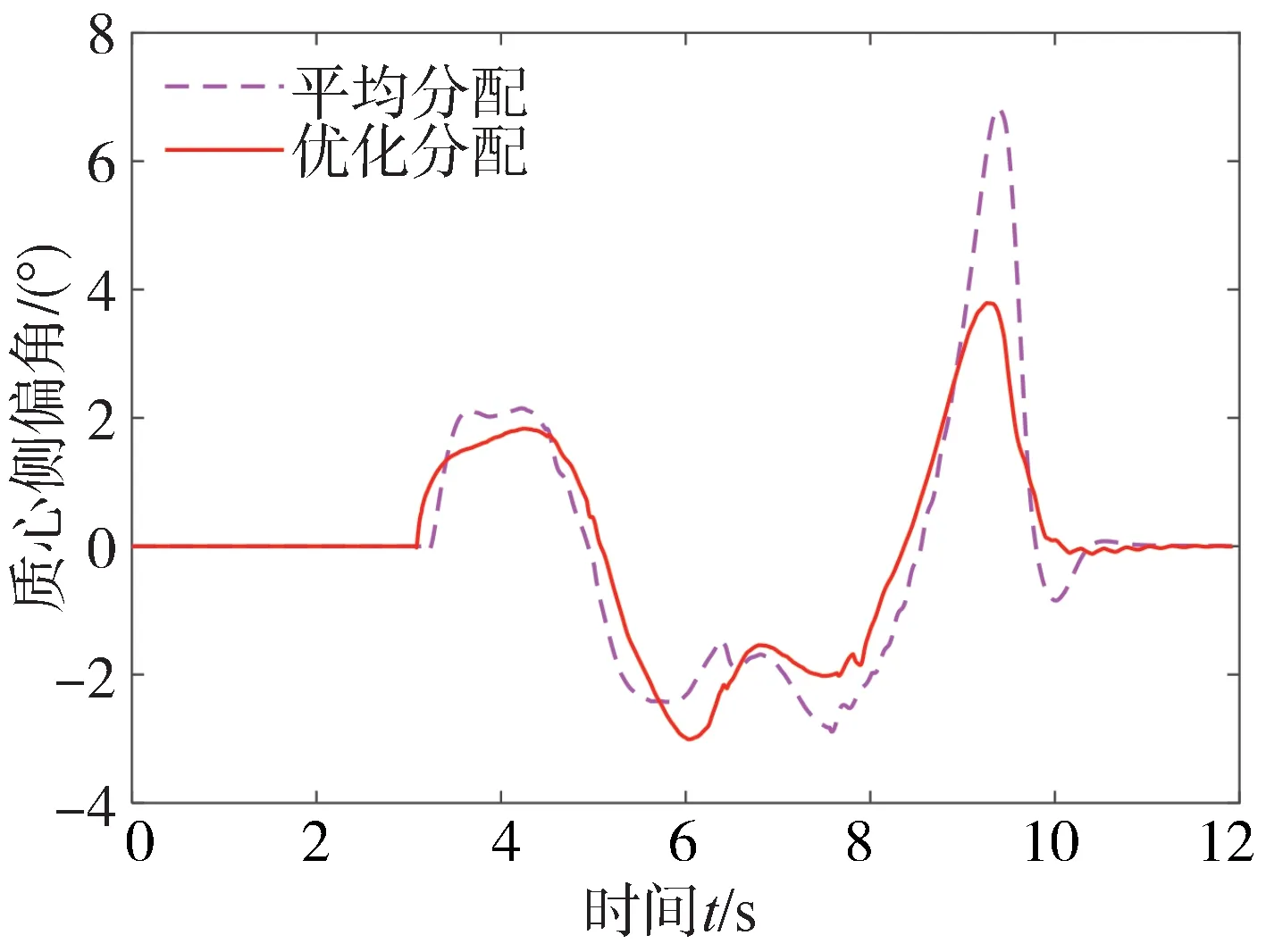
圖14 車輛質心側偏角曲線
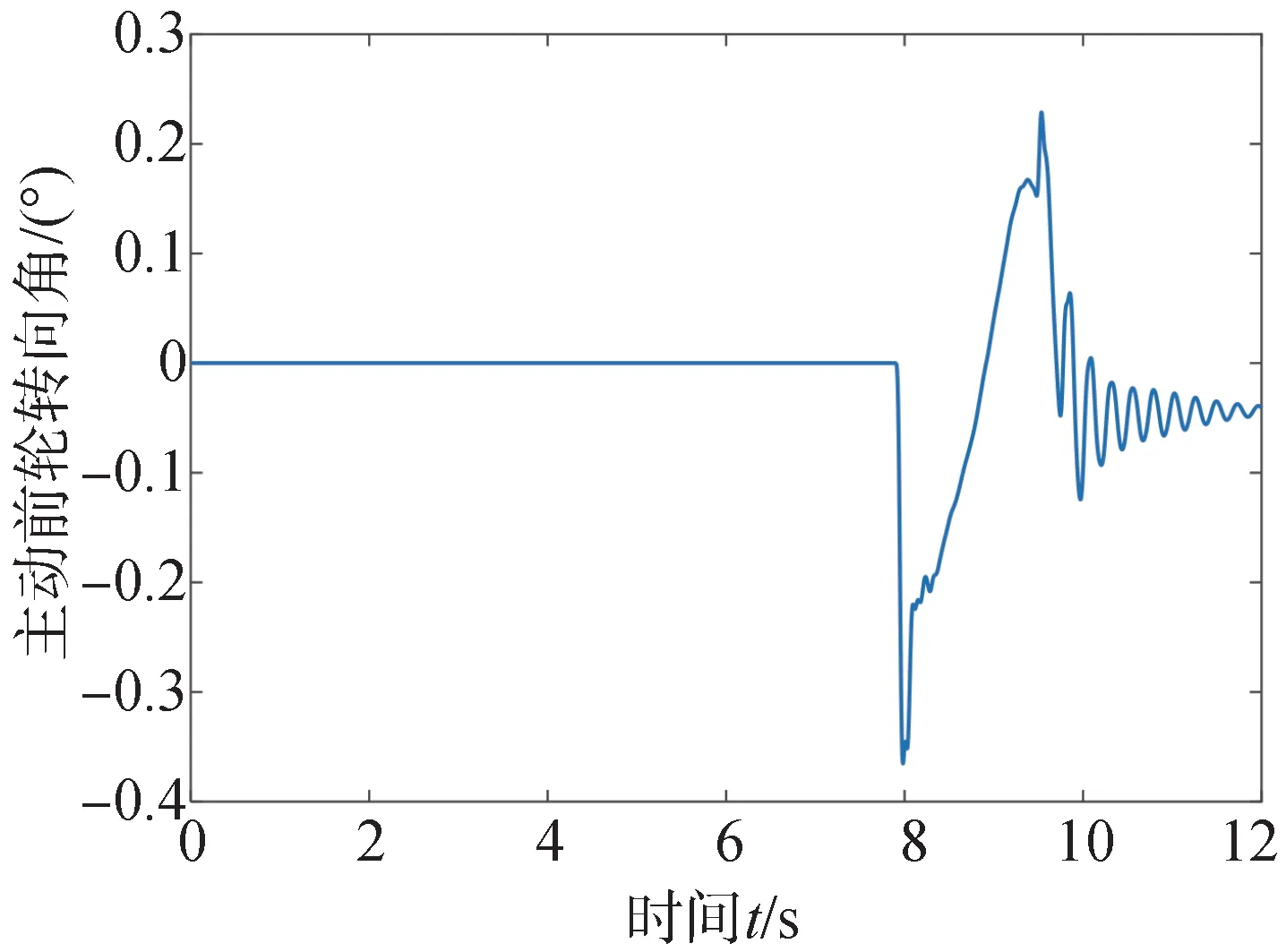
圖16 主動前輪轉向角變化曲線
由圖13 和圖15 可以看出,在第5 s 車輛右轉彎時外側電機出現故障導致車輛呈現不足轉向趨勢,而在左轉過程中故障電機變為內側導致車輛呈現過多轉向;為減小橫擺角速度誤差第8 s驅動電機出現過飽和,主動轉向介入使得電機峰值轉矩由244 降至200 N·m,而誤差值逐漸減小。由于本文并未選擇犧牲動力性來提高安全穩定性的方式,而是利用協調控制增加側向力與橫擺力矩,所以車速均在期望值附近。仿真結果表明該分配方法可以確保車輛安全性、穩定性與動力性。
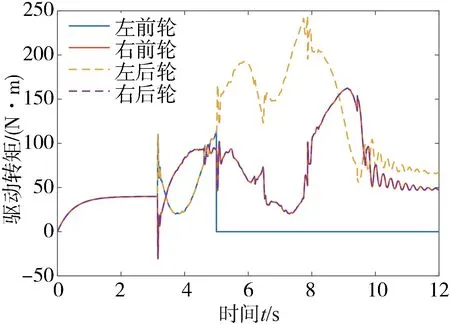
圖15 四輪驅動轉矩變化曲線
4 結論
(1)提出了針對驅動電機正常工作和故障模式下的驅動力優化分配策略,通過控制分配不僅可實現驅動電機正常工作時的車輛操縱穩定控制,同時可保障驅動電機故障下的車輛行駛安全穩定性。此外,考慮到驅動電機輸出能力的限制,提出了協同前輪轉向的分配控制方法,解決了電機故障下橫擺力矩不足的問題。
(2)搭建了Carsim 和Simulink 聯合仿真模型,在不同工況下對控制策略進行仿真驗證。結果表明,所提出的協調控制策略在正常工作和故障模式下均能較好地跟蹤期望車速,并使得側向和橫擺方向誤差保持在較小范圍內。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
