基于AUKF的鋰離子電池SOC估計方法*
2022-08-04 07:20:36弓清瑞張吉昂
汽車工程 2022年7期
王 萍,弓清瑞,程 澤,張吉昂
(天津大學電氣自動化與信息工程學院,天津 300072)
前言
鋰電池作為一種清潔能源,以其能量密度高、體積小、壽命長等優點,被廣泛應用于電動汽車和電力系 統 等 諸 多 領 域。 電 池 管 理 系 統(battery management system,BMS)可以實現對電池的科學評估和風險預警,從而保證電池的穩定運行。電池荷電狀態(state of charge,SOC)直接反映了電池的剩余電量,它的準確估計是BMS 運維的關鍵環節。然而SOC 并不能直接測量,只能通過電池的外部可測變量,結合數學算法來推斷。
目前SOC 的估計方法主要有直接測量法、數據驅動法和基于自適應濾波器的方法。
直接測量法包括安時積分法和開路電壓法。安時積分法是通過對放電過程中電流隨時間積分來獲得SOC。該方法有簡單易用的優點,但十分依賴于SOC 初值的確定,且電流的測量誤差會隨時間累積。開路電壓法是通過測量電池的開路電壓(open circuit voltage,OCV),通過查詢OCV-SOC 曲線來獲得電池SOC。但該方法須將電池離線后進行長時間靜置,因而難以用于SOC的在線估計。
數據驅動法是使用機器學習的算法建立電池外部可測變量如電壓、電流和溫度等參數與SOC 的映射關系。機器學習方法主要包括統計機器學習方法和神經網絡的方法。其中,后者有更靈活的內部結構,對非線性關系的表達能力也更強,應用也更廣泛。這類方法無須分析電池復雜的電化學反應,但計算量較大,且十分依賴于訓練集的有效可靠。
基于自適應濾波的方法須建立等效電路模型,再結合濾波算法來實現SOC 的閉環估計。如文獻[11]中使用2 階RC 模型對鋰電池進行建模,并結合模糊自適應卡爾曼濾波器來實現對SOC 的實時估計。常用的等效電路模型有PNGV 模型和RC 模型等。常用的濾波算法有觀測器、粒子濾波器、卡爾曼濾波器等,其中卡爾曼濾波器最為常用,有著許多優秀的變型,如擴展卡爾曼濾波器、自適應擴展卡爾曼濾波器和無跡卡爾曼濾波器等。這類方法可以矯正SOC初始值不確定造成的誤差和緩解過程中誤差積累,但對等效電路的參數較為敏感。
無跡卡爾曼濾波器(unscented Kalman filter,UKF)因其優越的性能被廣泛應用。但UKF 存在對電池模型精度和系統噪聲的要求較高,穩定性不強的問題。針對該問題,本文中引入一般性的濾波器收斂判據,從自適應調整測量噪聲、調整過程噪聲和修正卡爾曼增益的角度改進UKF,形成了基于自適應無跡卡爾曼濾波器(adaptive unscented Kalman filter,AUKF)的SOC 估計方法。本文利用測試數據和馬里蘭大學電池數據集進行了實驗,結果表明所提方法具有較快的收斂速度和較高的估計精度。
1 RC等效電路模型
RC 等效電路模型結構簡單,只需少量的參數和較低的計算成本便可完成建模,應用廣泛。本文以2階RC 模型為例,展示電池建模和SOC 估計的過程,模型結構如圖1所示,其狀態空間數學表達式為

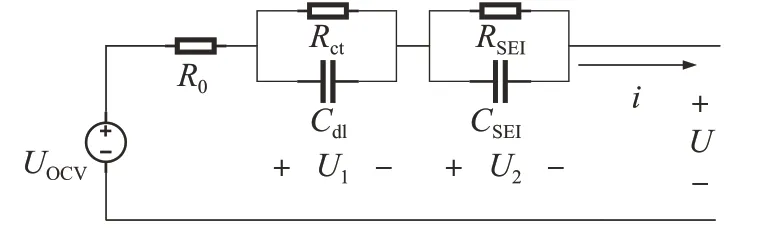
圖1 2階RC模型的結構
式中:表示電池端電流;代表電池端電壓;表示電池的歐姆內阻;和并聯環節表示電化學極化過程,和并聯環節表示濃度差極化過程;表示電池的開路電壓。
本文通過離線實驗對RC 模型阻容等參數進行辨識,具體包括(·)、、、、和。
2 參數辨識
2.1 CCP測試
本文的實驗對象是額定容量為3 A·h、標稱電壓為3.6 V 的18650 三元鋰離子電池。設定恒溫箱溫度為25 ℃,采用恒流脈沖(constant current pulse,CCP)測試進行參數辨識,實驗步驟如下:
①將室溫下充滿電的電池置于恒溫箱內,靜置1 h,記錄電池的開路電壓;
②以1C恒流放電3 min;
③靜置2 h,記錄電池的靜置電壓;
④重復過程②和③直至電池放空。
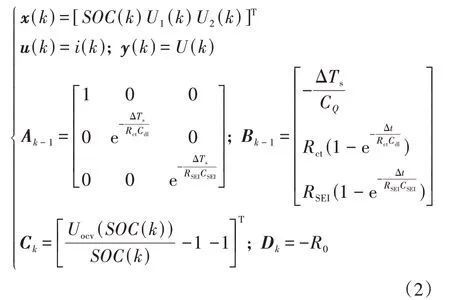
CCP 實驗的電壓和電流全周期和一個周期的變化曲線如圖2和圖3所示。
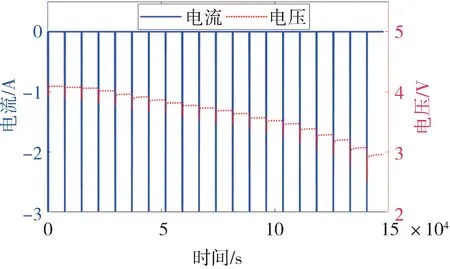
圖2 CCP測試全周期曲線圖
圖3 中A 點之前電池處于靜置狀態;在BC 段,以1C 放電3 min,電壓快速下降,SOC 下降0.05;在DE 段,電池靜置2 h,電流為0,電壓緩慢回升,并逐漸趨于穩定。
圖3 CCP測試一個周期曲線圖
2.2 OCV-SOC曲線擬合
在CCP 測試第③步中,取靜置結束時刻的E 點電壓值作為當前SOC 下的OCV 值。CCP 測試過程共得到20 個SOC-OCV 散點。本文將電化學模型Shepherd、Unnewehr 和Nerst 進行組合,得到一種較為理想的開路電壓模型,如式(3)所示,使用最小二乘法來對其進行擬合,從而得到各參數的辨識值。

2.3 阻容參數辨識
2.3.1的辨識
分別計算通電瞬間(AB 段)和斷電瞬間(CD 段)的后,取二者的平均值作為最終值,計算式為

式中Δ和Δ分別為通電和斷電瞬間電壓變化的絕對值,分別對應圖3 中AB 段的電壓驟降和CD段的電壓驟升。
2.3.2、、和的辨識
DE 段可看作是RC 環節的零輸入響應。D 為起點,電容和兩端初始電壓分別為(0)和(0),這時端電壓表達式如式(5)所示。使用最小二乘法對式(5)進行擬合,可以得到(0)、(0)以及時間常數、的值。

BC 段可看作RC 環節的零狀態響應。因為電容電壓不能突變,由C 點和D 點的極化電壓相等的關系可得

式中=3 min。
由式(6)和式(7)可計算得到和,進一步由=×的關系可得和。
RC 模型的阻容參數會隨SOC 的變化產生波動,使用線性插值法來擬合這種波動,即

式中:={0.95,0.9,...,0};X為對應的參數取值序列;為某個實際的SOC 值。Interp2 表示2 維線性插值運算,即在與距離最近的兩個參考點之間建立線性模型,將代入獲取此時的參數值。
3 AUKF算法
3.1 UKF算法
UKF 算法主要包括系統初始化、狀態預測和測量校正3個部分。
(1)系統初始化
初始化狀態量和誤差協方差矩陣為

用對稱采樣法生成初始Sigma點,其中為尺度參數:
(2)狀態預測
第個采樣時刻,Sigma點構建的矩陣為
對式(11)的Sigma點進行狀態方程的處理,并對時刻系統狀態量和誤差方差矩陣進行預測:
式中Q為時刻的過程噪聲協方差矩陣。
(3)觀測校正
計算時刻的觀測量的估測值:
計算時刻觀測量的方差矩陣為

式中R為時刻的測量噪聲協方差矩陣。
計算時刻狀態量與觀測量的協方差為

計算卡爾曼濾波增益為

更新狀態量與誤差方差矩陣為

3.2 AUKF算法的實現
UKF算法能夠實現對系統狀態的實時估計。但仍存在以下問題:
(1)由于在非線性系統中存在一些不確定因素,導致過程噪聲協方差矩陣Q和測量噪聲協方差矩陣R難以獲得準確值。而使用經驗法將它們設置為定值則會影響UKF的估計精度。
(2)UKF對RC模型的精度十分依賴,但RC模型的阻容參數辨識存在誤差是不可避免的。當模型誤差較大和R取值不當時,會通過測量校正環節引入較大的狀態估計誤差。
(3)實際應用中常存在SOC 初值存在偏差和測量噪聲異常擾動等突發情形。常規的UKF 對這些情形的自適應能力較有限。
3.2.1 測量噪聲協方差自適應調整
設置越大,表明對測量值的置信度越低,這會導致算法初始的收斂速度慢;設置越小,收斂速度越快,但會導致SOC 估計后期的波動性較大。可見過大或過小的值都會影響SOC 的整體估計效果。因此在濾波算法的初始階段設置較小的值,用表示,使SOC的估計初值快速向真實值方向收斂,等到估計值收斂到真實值附近時,再切換較大的值,用表示,以降低估計值的非線性波動。和的取值與電壓傳感器的測量精度有關,所以在SOC 估計的初始階段,的取值比電壓傳感器精確度低一個數量級,過小容易引起估計值波形在起始階段過沖。則取比傳感器精度高一個數量級的數,過大則會引起值減小,使測量校正失去作用。
根據文獻[21]中提出的濾波器收斂性判據,濾波器發散時,真實的估計誤差要遠大于計算得到的預測誤差。因此,SOC估計的發散條件為



在后續SOC 的估計過程中,能通過影響增益,進而影響SOC 估計的測量校正階段。當傳感器測量誤差較大或RC 模型的誤差較大,即時刻的觀測殘差ζ較大時,如果此時值非0,會在測量校正階段引入較大的估計誤差。因此為該算法設置第2個判據:

若式(20)不滿足,即觀測殘差ζ超過預設閾值時,則將設為無窮大,此時趨于0,相當于只進行狀態預測而不進行觀測校正,只有當測量誤差較低和RC模型精度較高時,才同時進行狀態預測和觀測校正。判據式(20)的引入,有助于降低UKF對RC模型精度和傳感器測量精度的依賴,增強SOC 估計的穩定性。
3.2.2 卡爾曼增益自適應調整
3.2.3 過程噪聲自適應調整
過程噪聲主要反映系統模型的誤差。通過在SOC估計的過程中動態調整,使其能充分反映系統模型本身的誤差,以避免模型誤差造成的SOC 估計精度過多的下降。方法是通過利用多個之前時刻的真實值與估計值的殘差,對下一時刻的Q進行遞推:

式中:-<<;e表示在-1~區間內,由電壓測量值與模型估計值的殘差組成的序列;G表示由e組成的協方差陣;表示該e序列的長度,該值越大,越能充分反映系統的模型誤差,但是計算量也越大。Q由式(24)不斷迭代遞推獲得。

通過在SOC 估計過程中對測量噪聲協方差、卡爾曼增益和過程噪聲協方差進行自適應調整,形成了AUKF算法,如圖4所示。

圖4 AUKF算法流程圖
4 實驗與分析
利用實際測試數據和馬里蘭大學電池數據集,對所提出的AUKF算法的性能進行驗證。
4.1 實驗測試數據
設置恒溫箱溫度為25 ℃,對額定容量為3 A·h、標稱電壓為3.6 V 的18650 三元鋰離子電池充滿電后,采用動態應力測試(dynamic stress test,DST)工況進行放電,放電過程中電池的電壓電流曲線見圖5。
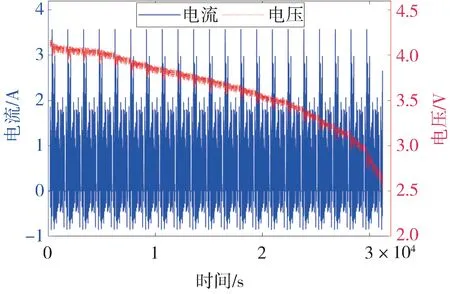
圖5 DST工況下電壓電流測試曲線
圖6展示了采用AUKF 和UKF 算法進行SOC 估計的結果和相對誤差,圖7 為采用AUKF 算法進行SOC 估計過程中的電壓觀測值和模型輸出值、擬合誤差即殘差隨放電時間的變化情況。由圖6 可知,UKF 算法收斂后的相對誤差在3%以內,而AUKF 算法收斂后的相對誤差則更小,接近于零,且具有更快的收斂速度,更高的估計精度,估計值曲線更加平滑和穩定。圖6 和圖7 右圖的綠色虛線表示發散與收斂的界限:在它之前的時刻,由于SOC初始誤差的存在,端電壓的擬合殘差也存在較大偏差,這時式(19)成立,濾波器處于發散狀態,此時選取較小的作為測量噪聲協方差,之后的時刻AUKF 收斂,選取較大的作為測量噪聲協方差。圖7右圖的紅色和藍色虛線分別表示電壓正閾值和負閾值,閾值設為0.03 V。在濾波器收斂后的SOC 估計過程中,由于傳感器測量精度或RC 模型本身的誤差造成一些時刻的觀測殘差大于閾值,則這些時刻的設為無窮大,只進行狀態預測而不進行狀態校正。
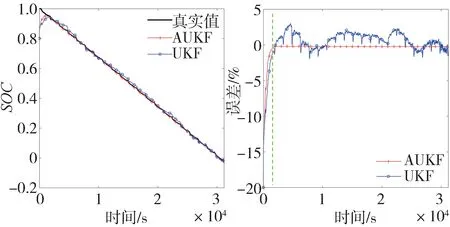
圖6 SOC估計結果與誤差(SOC0=0.8)

圖7 電壓觀測值、模型輸出值和殘差的時間歷程(SOC0=0.8)
為定量刻畫算法的收斂性能,定義“跟隨系數”為SOC 真實值與估計值的誤差絕對值小于0.02 所用的時間與放電總時間的比值。表1 列出跟隨時刻之后的平均絕對誤差(mean absolute error,MAE)和均方根誤差(root mean squared error,RMSE)及跟隨系數。
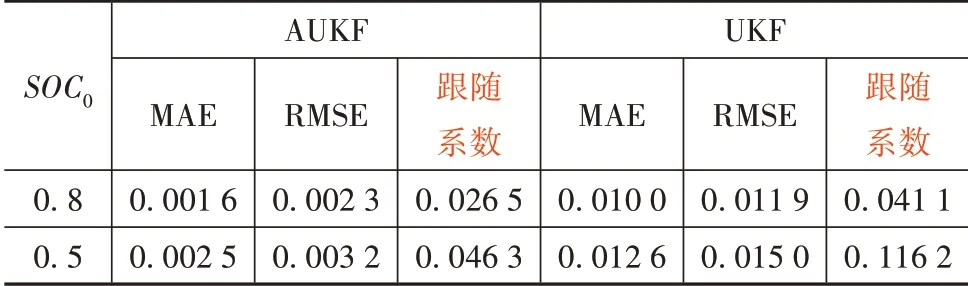
表1 SOC估計誤差和跟隨系數
為進一步驗證不同的SOC估計初值對兩種算法的影響,取=0.5,得到圖8 和圖9。由仿真測試結果可知,取較小的SOC估計初值時,兩種算法下的收斂時間均會變長,跟隨系數都有所增加,圖8 和圖9 的綠色虛線也更加靠右。其中UKF 的跟隨系數增加幅度更大,表明UKF 算法抵抗初值不確定性的穩定性較差。雖然AUKF 算法的估計誤差與初值為0.8 時相比略有增加,但估計誤差MAE 與RMSE 仍保持在較低水平。
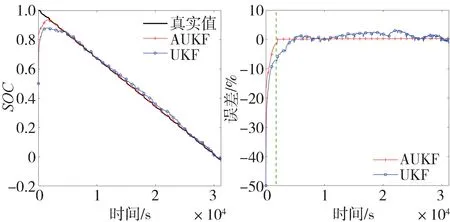
圖8 SOC估計結果與誤差(SOC0=0.5)
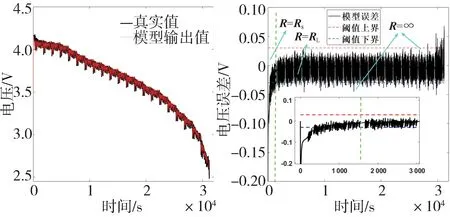
圖9 電壓觀測值、模型輸出值和殘差的時間歷程(SOC0=0.5)
為進一步驗證所提出的AUKF 算法對不同SOC初值的收斂能力,取為0.2、0.4、0.6 和0.8 進行仿真測試,得到結果如圖10 所示。估計誤差和跟隨系數列于表2 中。可知不同SOC 估計初值下,AUKF 均能可靠收斂,跟隨系數都保持在0.07以內。隨著初始誤差增大,跟隨系數升高,總體MAE 和RMSE 誤差增大,但最大值都不超過1%。這表明所提出的AUKF 算法具有較高的估計精度和較好的魯棒性。
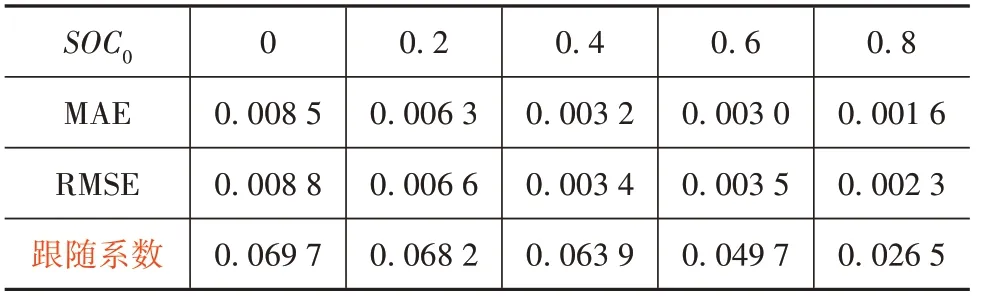
表2 不同SOC估計初值下的計算誤差和跟隨系數
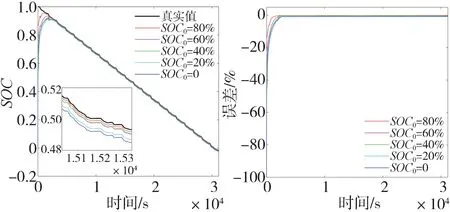
圖10 不同SOC估計初值下的估計效果與誤差
4.2 馬里蘭電池數據集
馬里蘭大學電池數據集使用額定容量為2 A·h、標稱電壓為3.6 V 的18650 三元鋰離子電池進行試驗。該數據集中提供了電動汽車常用的測試工況數據,如US06 工況、聯邦城市行車(federal urban driving schedule,FUDS)工況、北京動態應力測試(Beijing dynamic stress test,BJDST)工況。因此,該數據集很適合驗證本文提出的基于AUKF 的SOC 估計方法。需要注意的是,該數據集中的測試電池是從約80%額定容量時開始放電,在約為20%額定容量時放電結束,該放電區間也是電動汽車實際應用中最常用的放電區間。取=0.6,各動態工況的SOC 估計結果和誤差分別如圖11~圖13 所示,其MAE 和RMSE 計算誤差與跟隨系數列于表3 中。可以看到,在3種不同測試工況下,與UKF相比,AUKF具有更小的跟隨系數和估計誤差,表現出更加優越的性能。
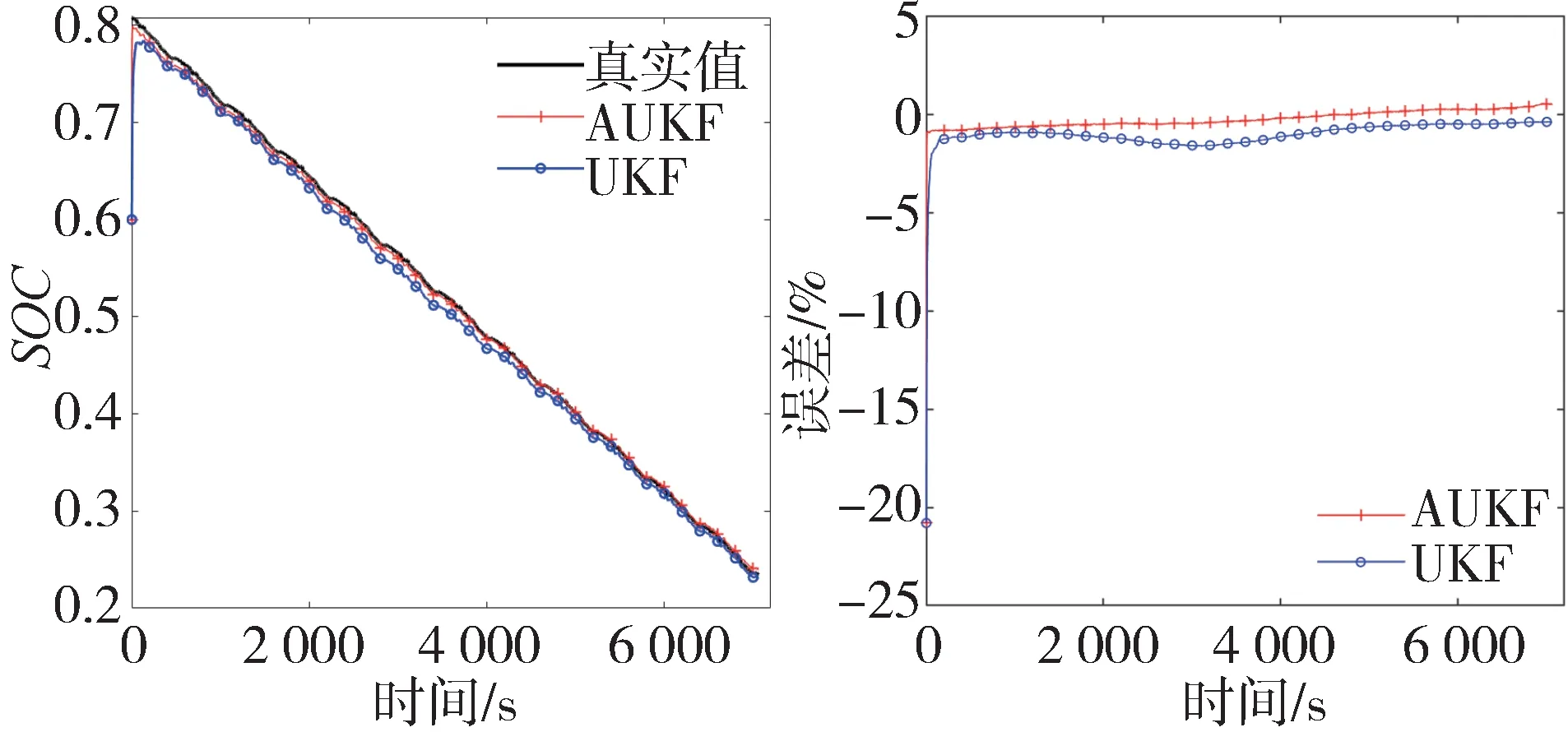
圖11 SOC估計結果和誤差(US06工況)
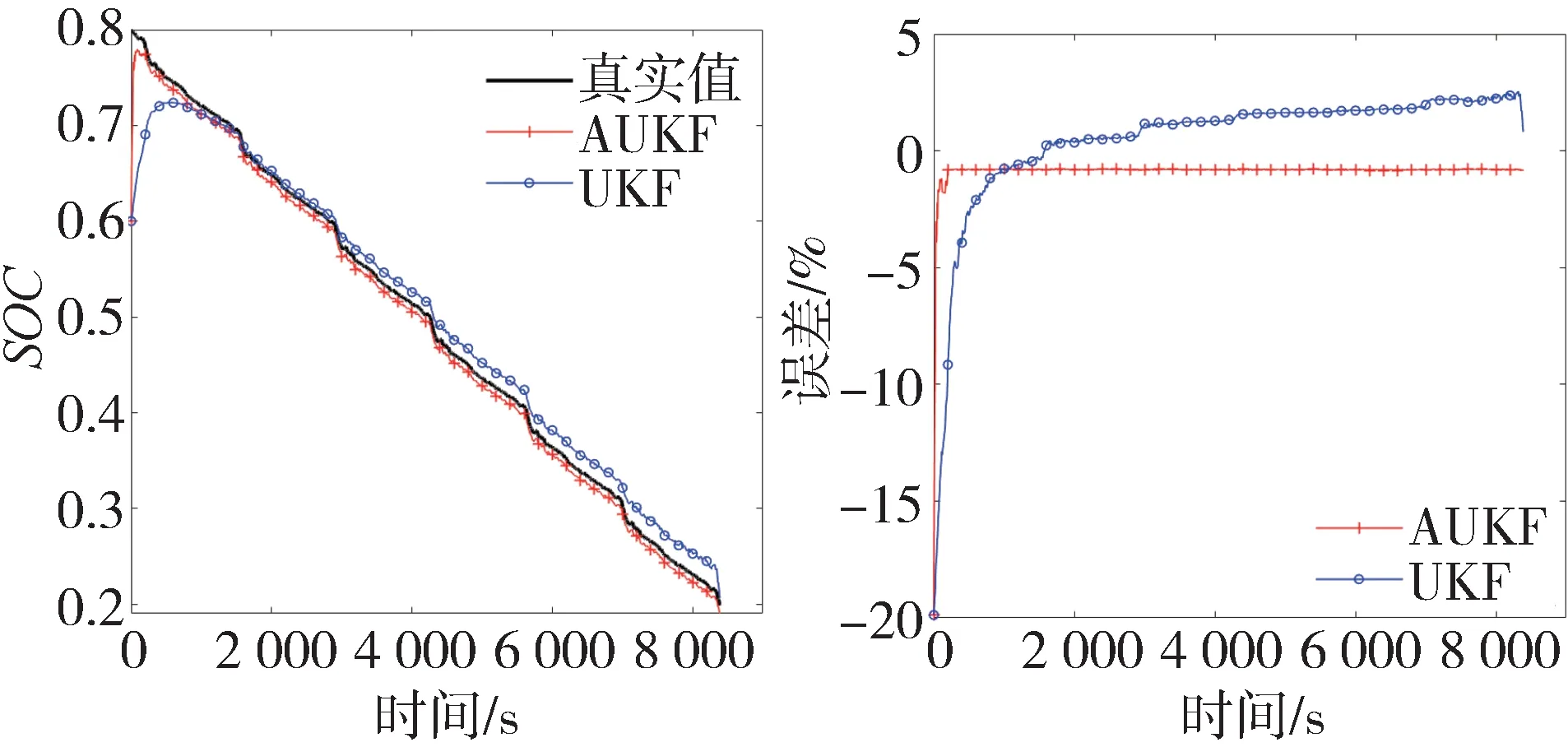
圖12 SOC估計結果和誤差(FUDS工況)
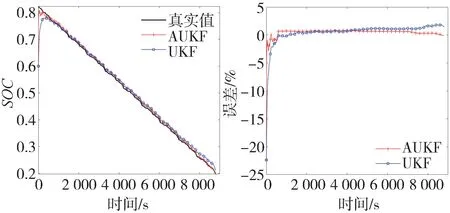
圖13 SOC估計結果和誤差(BJDST工況)

表3 馬里蘭數據集上的SOC估計誤差與跟隨系數
5 結論
首先介紹RC等效電路模型及其數學描述,完成了參數辨識和模型建立工作,并提出了一種阻容參數的二維插值方法,對阻容參數隨SOC 的變化進行建模。其次針對常規UKF 存在的問題,提出了一種AUKF 算法,該方法將濾波器的一般性收斂判據引入UKF 中,并通過對測量噪聲協方差、過程噪聲協方差和卡爾曼增益進行自適應調整,提升了濾波算法的穩定性和收斂性,降低了對電路模型精度的依賴。最后在實際測試數據的DST 工況、馬里蘭大學電池數據集的3 種循環工況中進行實驗驗證。結果表明在不同的測試工況下,與常規UKF 算法相比,所提出的AUKF 算法皆具有較高的估計精度、較小的跟隨系數和較平穩的估計曲線。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
