城市地表建筑物密集區的微動探測方法
——以成都市某海鮮批發市場的 淺表精細探測為例
2022-08-04 14:19:42張陳張偉易永杰姚世民何全華
科學技術與工程 2022年19期
張陳, 張偉, 易永杰, 姚世民, 何全華
(1.成都理工大學地球物理學院, 成都 610059; 2.中國地質調查局成都地質調查中心, 成都 610082; 3.四川省川冶陸零伍工程物探檢測有限公司, 成都 610082)
中國城市軌道交通行業發展迅猛,截至2020年底,有44座城市已經開通運營軌道交通線里程達7 715.31 km,此外,規劃將要修建的軌道線路總里程達6 701 km,行業發展潛力巨大[1]。軌道交通工程建設必須有完備的軌道沿線地質資料做支撐,城市內的地質勘探往往受到眾多人文因素干擾,常規地質勘探手段難以達到設計要求,目前常用的勘探方法是鉆探和原位測試相結合的綜合勘探方法[2],這類方法因為對人工建筑有損,在許多情形下不能使用,造成局部地質資料的缺失。
微動勘探作為一種利用天然源的面波勘探技術,具有無損、抗干擾能力強、能適應多種特殊工作環境、效率高成本低等多種優點[3-4],它利用低頻天然源信號,因此常用它來解決一些深部地質問題[5],例如,侯超[6]用微動勘探方法探查壓煤區的深層地質情況;付微等[7]用微動勘探圈定深部含水破碎帶和熱儲水層的區域分布取得了良好的效果;程建設等[8]等將微動勘探方法應用在病險水庫的隱患探測上,為堤壩隱患治理提供了精確的指導;李巧靈等[9]用微動測深技術探明了新生界厚覆蓋層的地質結構。一般來說,微動勘探利用的信號頻率較低,因此,它對高頻信號的信息獲取能力不足,所以往往淺表層是探測盲區,黃真萍等[10]通過對比分析主動源與被動源的面波勘探方法后,認為可以通過主動源與被動源相結合的方式進行面波勘探;李凱[11]從理論上系統闡述了主動源與被動源相結合的面波勘探方法的有效性和可行性。在城市建成區的實際工作中,主動源面波勘探方法存在產生噪聲、損傷人工建筑結構、物權條件不允許等弊端,對城市居民生活造成影響,常不被允許使用。
在此基礎上,現提出一種新的微動觀測技術,僅使用被動源信號對城市建成區進行淺部精細化探測,并結合實際案例分析微動勘探方法在城市軌道交通領域應用的實用性和有效性。
1 微動方法技術
微動勘探的理論基石是建立在平穩隨機過程理論和彈性波場理論上的,根據平穩隨機過程理論提取出采集時間段內的有效信號,再依據彈性波場理論中面波的頻率與波速隨時間和空間的變化而變化的特性,用相應的方法找出頻率與速度的關系,即提取頻散曲線,進而對頻散曲線反演估算地下介質的橫波速度結構,最終推斷地層分布情況。
1.1 擴展空間自相關法
根據Aki[12]提出了空間自相關法(spatial auto-correlation,SPAC)的理論,其基本原理是假定臺陣周圍不同方向入射的信號具有平穩隨機特征,在同一頻率具有相同的相速度,在此前提下,考慮兩個不同位置的臺站接收到的信號空間坐標的互相關,然后對不同方位相同距離的臺站對求方位平均,可以得到方位平均后的空間自相關系數,用空間自相關系數去擬合第一類零階貝塞爾函數,從而計算出不同頻率的相速度,最終得到面波的頻散曲線。
SPAC法的觀測臺陣需要布設成規則多邊形,對于多個不同半徑的圓形陣列,空間自相關法要求分別計算各自半徑的頻散曲線,再合并成完整頻散曲線,效率比較低,并且在實際工作中,施工場地往往不能滿足布設規則臺陣的條件。為解決這個問題,擴展空間自相關法(extended spatial auto-correlation, ESPAC)[13]被提出,這一方法的理論基礎與SPAC方法大致相同,即將采集的微動信號代入式(1),可解出某一組的空間自相關系數ρ(ω,r)。
(1)
式(1)中:ω為角頻率;r為半徑或者指參與計算的兩點之間的距離;θ為方位角;Sox(ω,r,θ)為圓心到圓周的空間自相關函數;Re[·]表示取復數的實部;So(ω)和Sx(ω,r,θ) 分別是圓心和圓周上微動記錄的功率譜[13]。
空間自相關系數中有頻率ω和半徑r兩個變量,若兩個變量同時存在,則式(1)是多解的,SPAC法的思想是,由于臺陣是規則的,相同的半徑r對應多個接受點,于是先固定半徑r,分別解出與之對應的所有ω,再換新的r,重復之前的操作。與之相對的,ESPAC的思想是,先固定頻率ω,把半徑r作為唯一變量。具體來說就是,對于某一頻率ω,不同半徑r和對應的空間自相關系數ρ(ω,r)組成r-ρ(ω,r)序列,通過最小二乘法尋求最優化貝塞爾函數來擬合r-ρ(ω,r)序列,并求出貝塞爾函數的宗量rk,接著由式(2)求出瑞雷波相速度c(f),重復上述過程,計算其他頻率的瑞雷波相速度,最終獲得頻散曲線。

(2)
式(2)中:rk為零階貝塞爾函數宗量;c(f) 為瑞雷波的相速度;f為波的頻率。
這種思路可以同時處理多個半徑的圓形陣列,提高了數據處理效率,這就為非規則臺陣的應用打下了基礎,推動微動勘探方法從理論走向實用[14]。此后,學者們對ESPAC法進行了深入研究,Okada[15]詳細研究了ESPAC法,Ohori等[16]將 EPSAC法應用到線性陣列中。
1.2 新型微動觀測臺陣
一般來說,地震勘探觀測系統的設置要滿足3個要求:一是采集數據的質量符合相關規范,二是探測有效深度要達到設計要求,三是實地施工要方便、高效、適應性強。
傳統的微動勘探觀測方法中,SPAC法與ESPAC法各有優勢,圓形或嵌套三角形臺陣采集的數據波場方向性較強,精度較高,但臺陣布置需要較寬闊平坦的場地,線型、L形或T形臺陣布置靈活,能適應狹窄的采集環境,但它接收信號的方向較單一,采集的數據抵抗不規則人為干擾的能力差,會影響頻散譜的能量集中度,給相速度頻散曲線的提取帶來一定的誤差[17],為提高數據質量,往往需要更長的采集時間。其次,無論是SPAC法還是ESPAC法,一個多道的觀測臺陣只對應一個測點,要想得到一幅二維剖面圖,則必須將臺陣整體平移以測出測線上每個點的數據,這樣施工效率較低;此外,微動勘探利用的是低頻信號,一般用來探查深部地質構造,若想探明淺部地層的地質結構,對地層精細劃分,則必然要獲取有效的相對高頻的信號,即要獲取前文提到的因人類活動產生的常時微動信號。
針對上述問題,借鑒于分布式高密度電阻率法的布極方式和常規地震勘探方法中多次覆蓋的原理,提出設置連續滾動的線性觀測臺陣,如圖1所示,至少有兩種類型的布置方式,它們都有一條沿測線方向的主線,另外還有一條旁側線,主線檢波器的間距為a,旁側線檢波器間的間距為b,旁側線的檢波器布置頻率低于主測線檢波器的頻率。圖1中,類型1類似十字形臺陣,適用于車流量較少的步行街、巷道等;類型2類似于T形臺陣,適用于車流量較大的街道。通過調整側方向檢波器間的間距b,使車輛可以從中間順利通過,這樣既不影響道路上車輛的正常行駛,還可獲取更多常時微動信號。在實際操作中,可根據現場情況混合使用兩種類型。
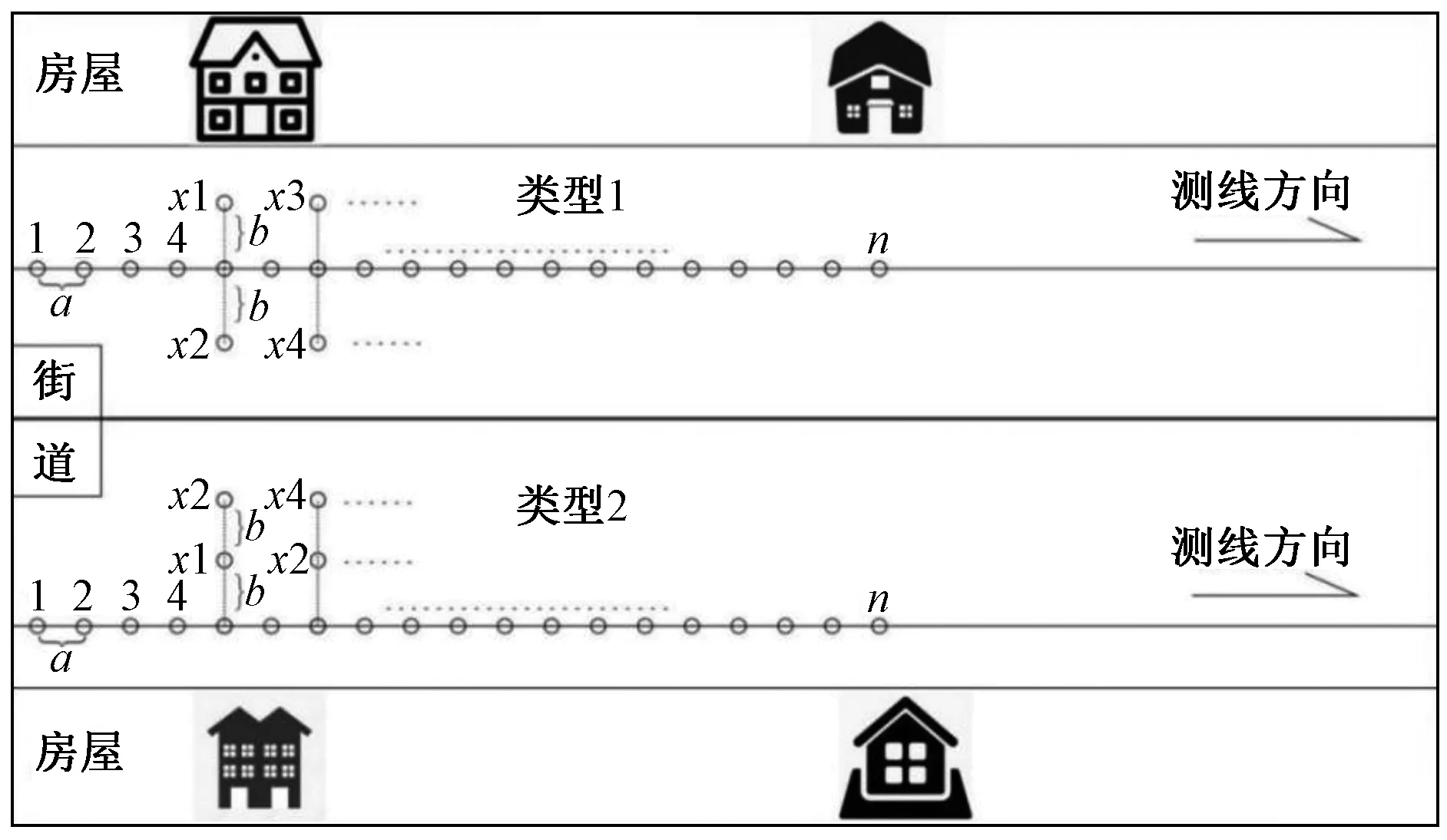
圖1 新型觀測臺陣Fig.1 New type of observatory array
對單獨一個測點來說,由于是多個檢波器組成的臺陣同時采集數據,在對某一個測點進行自相關運算時,參與計算的檢波器個數是可以任意選擇的。

圖2 檢波器組合模式Fig.2 Geophone combination mode
如圖2所示,該方法的臺陣組合模式并不是單一的,有多種臺陣組合模式可以選擇,在室內資料處理之前,可以先選定一種檢波器組合模式作為本測區資料處理的標準模式,在滿足對大多數點處理效果質量達標的同時,還要兼顧處理效率,檢波器參與運算少,處理速度越快。對重點探測區域可以選擇多種臺陣組合模式進行運算,相互印證以提高處理精度;對于某些檢波器的數據受到干擾質量不佳時,由于檢波器布置密度較大,可直接剔除壞道,從周圍較遠處選擇更多檢波器參與運算,獲取更多有效信息,因此只要現場操作符合規范,一般不存在對壞點重測的情況,即它的容錯率較高。
此外,根據面波傳播的規律,當深度z與波長λ接近相等時,其能量迅速衰減,這表明,某一波長為λ的面波速度與深度小于λ的地層物性有關,通常認為,面波的勘探深度約為半個波長。
大量實驗表明,微動勘探的最大有效深度H與檢波器的自然頻率、工區地層環境、臺陣的最大計算距離D有關,最大計算距離D指在進行自相關計算時,計算中心與離中心最遠檢波器之間的距離。在工作中能靈活調整的參數只有D,線性滾動臺陣的檢波器排列是連續的,對單點的運算,選用更多主線上的檢波器就意味著更大的計算半徑,也就增加了探測深度。
對一整條測線來說,由于同時布置多道檢波器,它的優勢在于:
(1)檢波器的利用率顯著提高,同一時間可以測量多個測點的數據,大大提高了采集的效率。
(2)側方向檢波器的存在,可以獲取更多方向的信號,可以壓制單一方向上人為因素的干擾。
(3)通過調整檢波器間距b,能很好地適應城市建成區內的公路、步行街、小巷道等復雜采集環境。
(4)與常規微動臺陣相比工作效率大幅提高,施工人員更少,更輕松。
1.3 臺陣對比實驗
在城市建成區這樣的特殊工況背景條件下,干擾源眾多,工作時間一般只能選擇在夜晚,數據的采集不僅要保證質量,還要保證效率,因此選擇一種合適的采集臺陣非常重要。近年來,相關地質工作者已經把微動方法應用在多種勘探環境中,并取得了顯著的成果,圓形、三角形、L形、T形等多種臺陣布置方法已經被證實是有效的方法。為驗證本文提出的連續滾動臺陣的有效性,在市內某寬闊街道上設計一條實驗測線,分別用嵌套三角形臺陣、線性滾動臺陣進行測量,提取各類型的單點頻散圖譜做對比分析。
從圖3可以看出,在各類型臺陣單點頻散能量譜清晰收斂的范圍內,特別是低頻區域,具有較高的相似度,因此據此反演后的視橫波速度及地層劃分也將大致相同,探測深度均能達到30~35 m。但在高頻區域,存在一定差異。
如圖3(a)所示,嵌套三角形臺陣采用3層嵌套,共使用10個檢波器,最外層三角形外接圓的半徑約為6.93 m。從頻散圖譜中可以看出,嵌套三角形臺陣的能量譜連續性好,它對應的信號高頻端收斂范圍已經大于預設的頻帶限制,因此,嵌套三角形或者說圓形臺陣的抗干擾性能最強。
如圖3(b)、圖3(c)所示,T形和十字形臺陣選用11個檢波器,最大計算半徑為12 m。在相同的采集時間內,T形臺陣與十字形臺陣頻散譜亦能明顯收斂,且連續性較好,在圖示頻率范圍內,高頻端收斂效果較好,有效壓制外界人為干擾,對淺部地層結構的精細劃分有重要意義。
如圖3(d)所示,線型臺陣選用9個檢波器,最大計算半徑為12 m。從頻散圖譜中可以看出,線型臺陣相對低頻端能量譜收斂效果好,但對于高頻端能量譜收斂效果差,可能是受到外界干擾導致的,要想達到與前者相似的效果,應該需要更長的采集時間。
因此,在條件允許的情況下,應該優先選用嵌套三角形或圓形臺陣,但在城市建成區的微動勘探工作中很難達到此陣型的布置條件,如本試驗中,需要最大半徑約為7 m寬的場地,還需要滿足車流量少、行人少、足夠長的條件,這是很難實現的。因此,線型滾動臺陣的排列方式以其足夠強的環境適應力、容錯性、高效率、高分辨率,應該是一種較好的微動臺陣布置方式。
2 工況特征與測線布置
成都市位于四川盆地西部,介于東經102°54′~104°53′和北緯30°05′~31°26′之間,該軌道交通工程位于成都市平原區,整體北東高,南西低,地勢平坦,起伏小,地形地貌條件簡單,地面高程434~462 m。根據成因類型不同,沿線依次跨越川西平原岷江水系Ⅰ、Ⅱ、Ⅲ級階地,工區地貌單元為岷江水系沖積平原Ⅱ級階地,地勢平坦,場地整體起伏微小。
2.1 工作區的工況背景
工區位于成都市內某海鮮市場內部,由圖4可見,市場周圍道路眾多,車流量大,建筑物密集,市場內部巷道四通八達,路面普遍很窄,大多在3 m以內,地面為水泥硬化路面,水產品商鋪較多,地面潮濕,低洼處有積水,地表下污水管道縱橫交錯,不間斷的有水流流過。整體來看,工區地勢平坦,高程均在439~440.5 m。在白天,顧客絡繹不絕,完全沒有布置微動臺陣的空間,因此,勘探工作只能在晚上進行。
2.2 測線位置與外業施工
該軌道交通線路穿過此海鮮市場內部,由于物權原因,市場內部不能開展鉆探作業,為查明市場內部地下地質構造、不良地質體等地質情況,劃分地層層位,測線布置在海鮮市場內部巷道內。此外,為驗證微動方法的準確性,在離工區最近的3口鉆孔處,采用相同的檢波器、道間距及采集時長,布置十字形臺陣作對比試驗,測得結果經過處理后與鉆孔層底劃分作對比,評價微動方法的準確性。
如圖4(a)所示,共布置兩條測線,分別命名為P1線、P2線,由于場地條件狹窄,利用線型滾動排列布置不規則臺陣采集數據。其中,P1線位于雙車道上路面較寬,布置成類似十字形的線性滾動臺陣,總長為180 m,點距為5 m,主線上道間距為2.5 m,旁側線上道間距為2.5 m;P2線位于商鋪間的窄巷道中,布置成類似T形的線性滾動臺陣,總長為110 m,點距為5 m,主線上道間距為2.5 m,旁側線上道間距為2 m。從更大比例尺的圖4(b)和圖4(c)可看出,測線布置在密集的建筑群內,施工條件并不理想。
排列布置如圖5所示,兩線單次排列均是共用31道檢波器,一次可同時測6個測點,單次采集記錄時長為45 min,搬站時長為5~15 min,一個排列的采集時間確保在1 h以內,搬站按照高密度電阻率法滾動方式向前移動,同時記錄下每個排列內各位置的檢波器編號。
數據采集工作使用深圳面元智能科技有限公司的SmartSolo地震勘探數據采集系統及配套的IGU-16HR節點振動傳感器,其自然頻率為5 Hz,采樣率為0.5 ms,各道坐標使用搭載千尋知寸-FindCM厘米級精度定位服務的RTK設備采集。數據經節點儀搭配的數據采集系統分割后,使用北京驕佳技術公司的Geogiga Surface Plus軟件中提供的ESPAC處理模塊進行處理。

圖3 不同臺陣類型對比分析Fig.3 Comparison and analysis of different array types

圖4 分級工區影像圖Fig.4 Image map of graded work area

圖5 單次排列布置示意圖Fig.5 Schematic diagram of single arrangement
3 工作區地質背景與物性特征

由于微動研究的物性主要是介質的剪切橫波速度,根據軌道工程在工區附近的鉆探工作資料,整理的目標區內,地下各層介質橫波速度見表1。
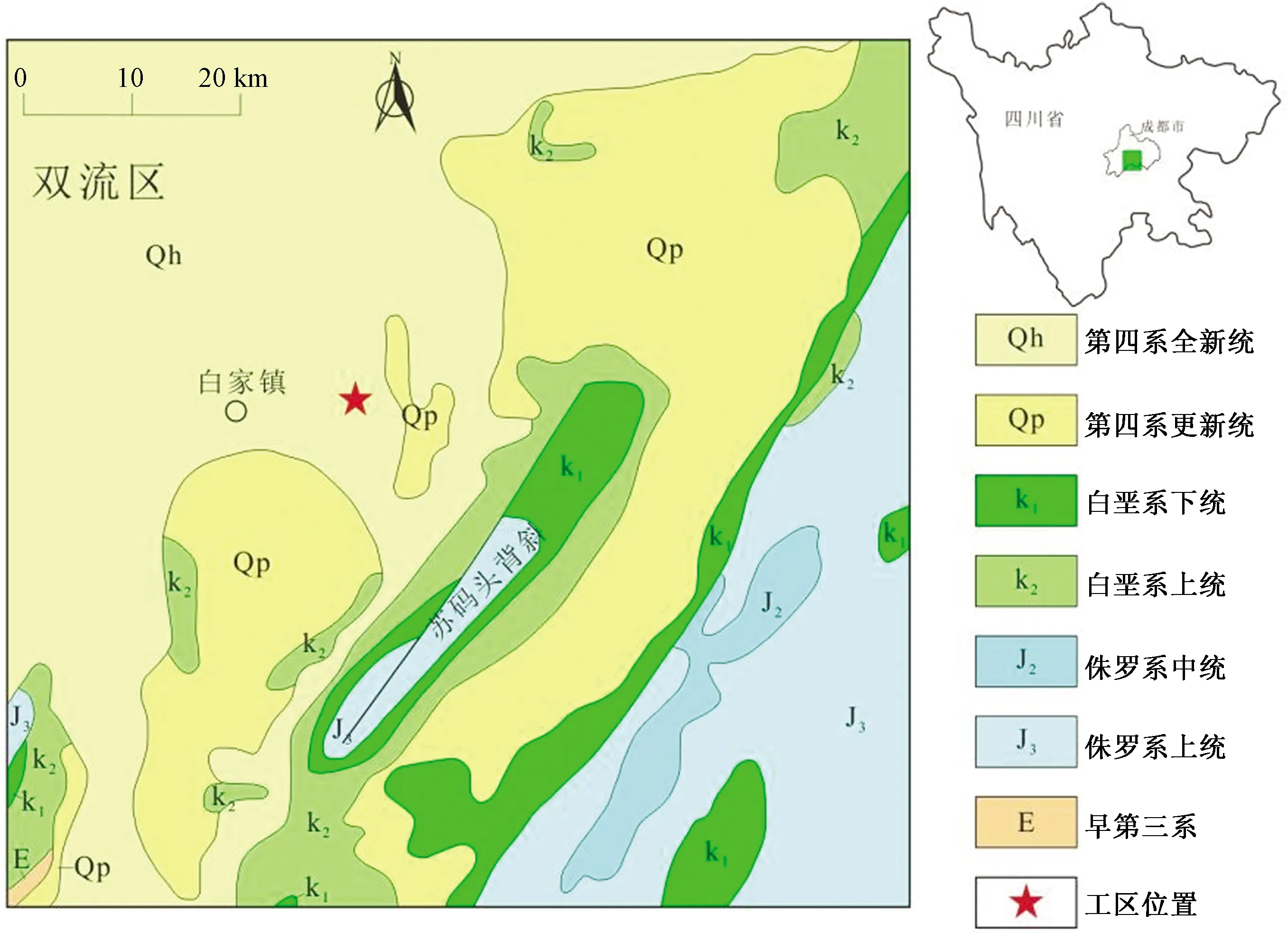
圖6 工區地質背景圖Fig.6 Geological background of the working area
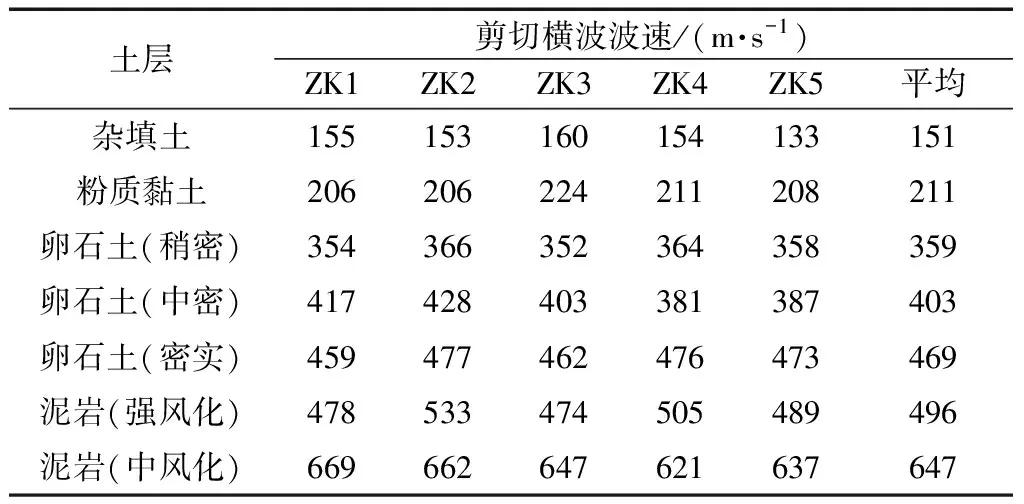
表1 工區鉆孔剪切橫波波速統計表Table 1 Statistical table of shear wave velocity of borehole in working area
4 勘探成果與鉆孔驗證分析
4.1 微動推測結果與鉆孔層底劃分對比
為驗證微動方法的準確性,在工區附近一口鉆孔處,采用相同的檢波器、道間距及采集時長,布置十字形臺陣做對比試驗,測的結果經過處理后與鉆孔層底劃分作對比,對比結果如圖7所示。
如圖7所示,通過微動單測點的橫波反演速度結構與測點處鉆孔柱狀圖對比可見,單點探測結果能清晰區分覆蓋層、卵石層、基巖層的界線,與鉆探成果大致吻合,這說明在鉆探施工不便的情況下,微動方法是一種有效的替換方法。
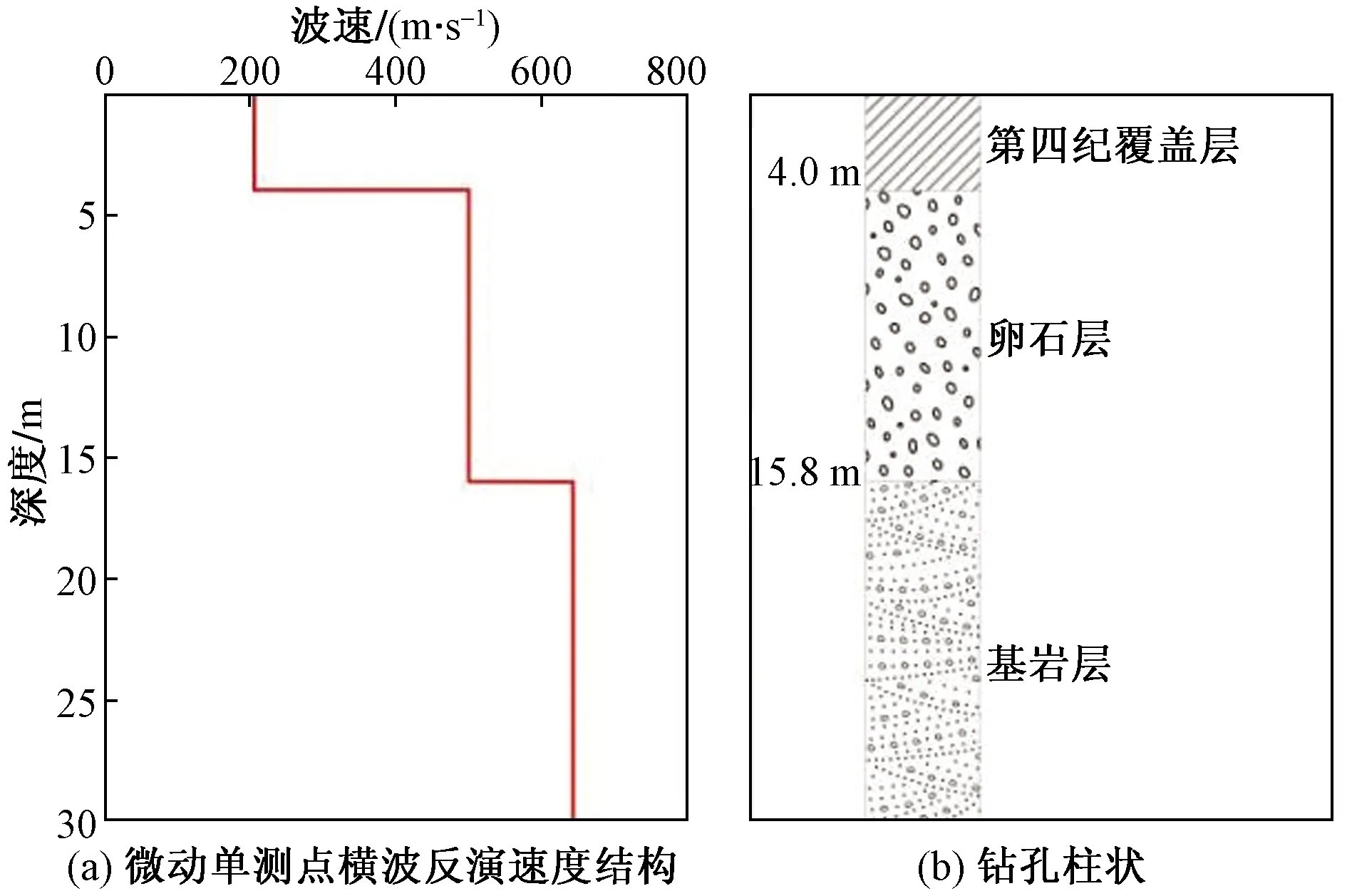
圖7 單測點S波速度結構與鉆孔驗證Fig.7 S-wave velocity structure at single measurement point and borehole verification
4.2 P1線成果分析
P1線位于市場邊雙車道上,路面較寬,微動視橫波速度剖面如圖8所示,該區域地層由淺至深視橫波速度逐漸增大,淺部地層較平緩,圖上可見存在明顯的波速突變界面,從上至下可明顯看出4個巖性界面,分別是,雜填土層,沖積、沉積粉質黏土,沉積卵石土層,風化泥巖層,再根據工區周圍巖土工程資料及收集的介質波速信心,沉積卵石土層可細分為稍密、中密、密實三層,風化泥巖層可分為強風化、中風化兩層。
由圖8可見,雜填土層海拔437.5~440 m,層厚不均勻,是市場建設時,施工平整過的土層,厚度在0.5~3 m,圖8中里程120~160 m雜填土層較薄,主要成分為砂礫、卵石,部分為粉土、粉質黏土,局部上部含大量混凝土塊等建筑垃圾,表層多為瀝青混凝土路面,劃分的標志是視橫波速度小于170 m/s。

圖8 P1線視橫波速度剖面圖Fig.8 P1 apparent s-wave velocity profile
粉質黏土層海拔435.5~438.5 m,工區末端埋深較深,整體來看地層較平,黏土層主要由黏粒組成,土質較均勻,層狀構造,結構致密,具有弱-中等膨脹性。
卵石土層是成都平原常見的地層結構,海拔約在423~435 m,按壓實程度從上至下可細分為稍密、中密、密實三層,在圖8中,卵石土細分層界面用洋紅色線條區分,厚度分布不均勻,其中稍密層層厚2~4 m,中密層層厚1~3 m,密實層層厚4~7 m,黏土層與卵石層界面劃分的標志是速度大于290 m/s。
圖9中基巖層為白堊系上統灌口組泥巖,顏色呈紫紅色、褐紅色,主要由黏土礦物組成,泥質結構,中厚層狀構造,按風化程度分區強分化和中風化。強風化泥巖層與卵石層界面海拔在423~428 m間,界面起伏不平,測線末端界面埋深較深,與卵石層界面區分的速度標志是速度大于500 m/s。中風化泥巖層與強風化泥巖層界面劃分標志為波速大于700 m/s,其界面起伏明顯,深度變化大。
4.3 P2線成果分析
P2線位于市場內部小巷道上,路面窄,地面有積水,地下有排水管道,微動視橫波速度剖面如圖9所示,該區域地層由淺至深視橫波速度逐漸增大,淺部地層較平緩,可見存在明顯的波速突變界面,從上至下可明顯看出4個巖性界面,分別是,雜填土層,沖積、沉積粉質黏土,沉積卵石土層,風化泥巖層,再根據工區周圍巖土工程資料及收集的介質波速信心,沉積卵石土層可細分為稍密、中密、密實三層,風化泥巖層可分為強風化、中風化兩層。
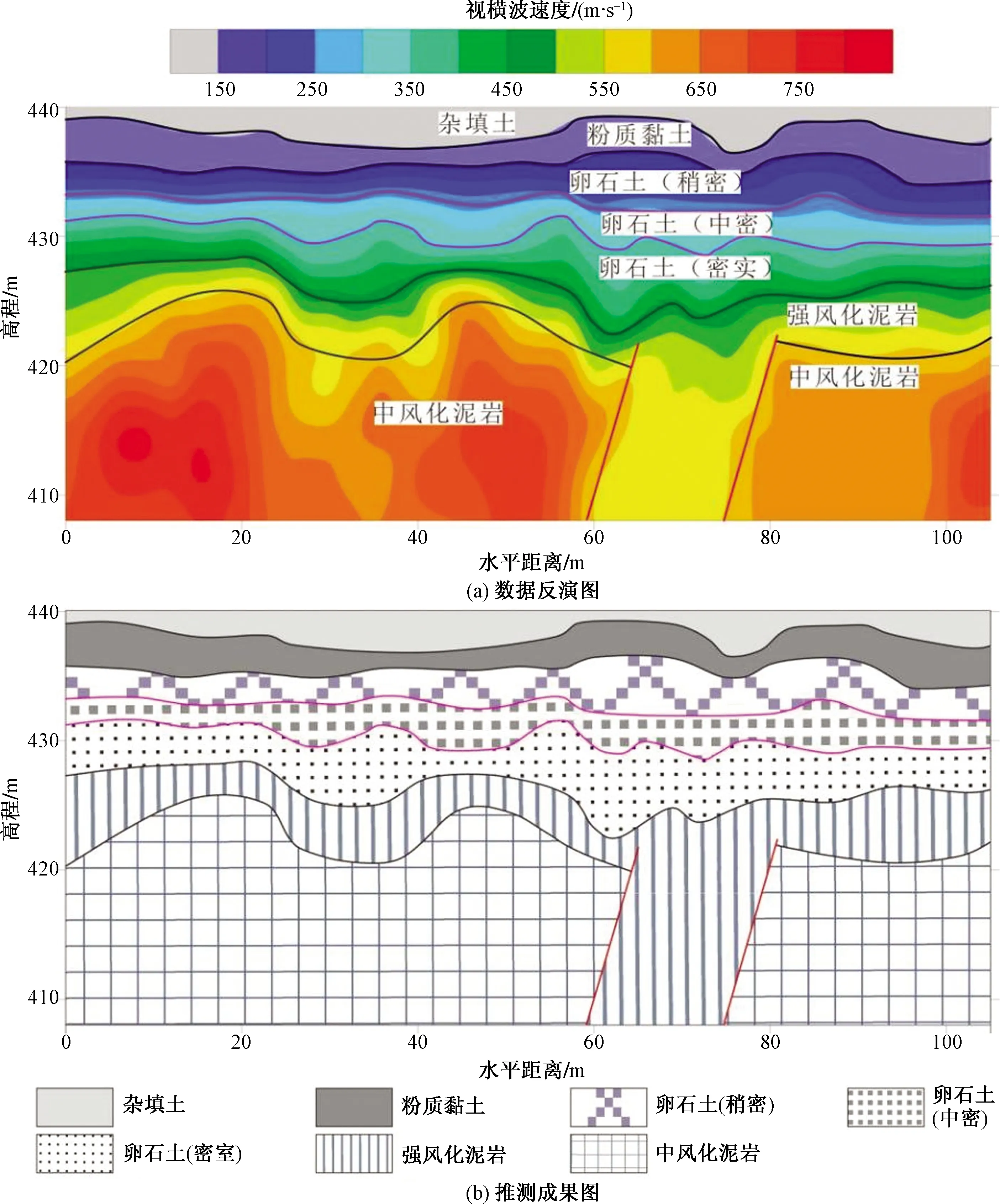
圖9 P2線視橫波速度剖面圖Fig.9 Apparent s-wave velocity profile of P2 line
雜填土是市場建設前平整場地堆砌而成的,海拔437.5~440 m,層厚不均勻,厚度在0.5~3 m,劃分的標志是視橫波速度小于170 m/s。
粉質黏土層海拔436~438.5 m,層厚分布不均勻,相較于P1測線,此區域黏土層相對較厚,整體來看地層較平,平均厚度約為2 m,黏土層主要由黏粒組成,土質較均勻,層狀構造,結構致密,具有弱-中等膨脹性。
卵石土層是成都平原常見的地層結構,卵石層與黏土層界面較平,界面海拔為434.5~436 m,按壓實程度從上至下可細分為稍密、中密、密實三層,在圖9中,卵石土細分層界面用洋紅色線條區分,厚度分布不均勻,其中稍密層層厚2.5~4 m,中密層層厚2~3 m,密實層層厚3~7 m,黏土層與卵石層界面劃分的標志是速度大于290 m/s。
強風化泥巖層與卵石層界面海拔在423~427 m,劃分的速度標志是速度大于500 m/s,界面起伏不平,在水平里程60~68 m,地層橫向不連續,波速呈“下凹”趨勢,故推測為一處斷裂。中風化泥巖層與強風化泥巖層界面劃分標志為波速大于700 m/s,其界面起伏明顯,深度變化大。
5 結論與建議
(1)微動方法具有無損探測、抗干擾、設備輕便的優點,能輕松適應建筑物密集,交通線路復雜,強背景干擾的工作環境,在鉆探工作難以開展的地區,能夠成為一種有效的替代手段,為城市地下空間探測工作提供有力技術支撐。
(2)借鑒分布式高密度電阻率法的布極方式和常規地震勘探方法中多次覆蓋的原理,提出的線性滾動臺陣采集裝置,經過單點和整條測線的檢驗,在探測精度、施工效率、容錯性等方面均有其獨特的優勢。
(3)傳統微動方法中,高頻信號難以提取,造成淺部盲區,往往采用主動源方式補齊淺部地層的高頻信號。經過實驗,配合具有較高的自然頻率的檢波器及較小的檢波器間距,可以清晰提取到50~10 Hz范圍內高頻信號,有效減小了微動方法的淺部盲區,同時也提高了微動方法的分辨率。這不僅消除了主動源施工對環境的干擾,還符合城市地下空間探測中,探測深度相對較淺,探測精度高的要求。
(4)與高密度電法一樣,文中提出的新型臺陣布置方法對單點進行計算的過程是一種按特定規律的重復運算,因此可通過編程實現自動化的數據運算流程。
猜你喜歡
當代陜西(2020年13期)2020-08-24 08:22:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
制造技術與機床(2017年5期)2018-01-19 02:49:17
金秋(2017年4期)2017-06-07 08:22:16
中國材料進展(2016年10期)2016-12-26 06:50:20
濰坊學院學報(2016年2期)2016-12-01 13:00:11
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
新聞傳播(2015年11期)2015-07-18 11:15:04
