鋼索約束下噴桿臂的動力學行為數值模擬與試驗*
2022-08-12 02:29:10閆軍朝薛新宇宗玉郭靖胡元森許浩浩
中國農機化學報 2022年8期
關鍵詞:振動
閆軍朝,薛新宇,宗玉,郭靖,胡元森,許浩浩
(1. 常州機電職業技術學院,江蘇常州,213164; 2. 農業農村部南京農業機械化研究所,南京市,210014; 3. 伊犁技師培訓學院,新疆伊寧,835000)
0 引言
2017年統計結果顯示,在中國,噴幅在10~14.9 m的中小型噴桿噴霧機占比達70%[1]。中小型噴桿噴霧機通過鋼索約束噴桿臂的大范圍振蕩。噴桿噴霧機田間作業時受到土壤不平整、車速變化、輪胎負載不均、藥液晃動等不確定因素影響,容易導致噴桿臂產生滾轉、橫擺等有害運動,鋼索的約束致使噴桿臂產生急停和振蕩,嚴重影響噴霧分布形態,導致化肥農藥“漏噴”和“重噴”現象發生。由于噴桿臂的不規則運動,其全面霧量分布的變異系數波動范圍為0~800%(理想的霧滴沉積為100%)。噴桿臂的滾動和垂直彈性變形的影響較大,特別是在噴桿臂的末端,在噴桿運動幅度最大的情況下,最大沉積量達到760%,最小沉積量為0[2-4]。噴桿噴霧機是復雜的多體系統,建立鋼索約束下的噴桿臂精確運動模型對探索其振動控制方法具有重要意義。
當前對噴桿臂動態響應的研究多集中在大型桁架式噴桿臂上[5-10]。對鋼索約束下噴桿臂的動態響應研究較少,鋼索約束下噴桿臂的動態響應屬于非線性動力學行為。目前,用于求解鋼索約束下噴桿臂非線性動力學問題的理論分析方法主要有數值求解法和解析求解法[11-13]。本文采用解析求解法中的分段線性法,通過傳遞函數將鋼索約束下的噴桿臂運動進行非線性分段,在各段中求解線性方程,并利用兩段間的邊界協調條件將各段的解聯系起來,從而得到噴桿臂碰撞振動問題的解析解。該方法時域變換形式簡單,使解算進一步簡便,并與試驗結果進行比較。
1 鋼索約束下噴桿臂振動模型
受鋼索約束噴桿臂的振動過程如圖1、圖2所示。以噴桿噴霧機靜止時的平衡位置為零點,取鉛垂坐標軸向上為正。當噴霧機在田間行走作業時遇到障礙物,障礙物給噴霧機施加一個階躍載荷激勵u(t),由于慣性作用,噴桿臂末端向下振動。當噴桿臂末端由平衡位置0向下振動時,受到鋼索的限位約束,產生碰撞,直至噴桿臂向下振動到最低位置1處,隨后向上振動。當噴桿臂末端向上越過水平位置0時,鋼索處于松弛狀態,噴桿臂末端向上最高振動位置2處,隨后,噴桿臂末端由位置2向下振動時,當噴桿臂到達平衡位置0時,受到鋼索的限位約束,產生碰撞。由于鋼索上端固定在噴桿懸架上,由于噴桿懸架各零部件間存在運動間隙,所以造成噴桿臂向下振動時可以越過鋼索限制的平衡位置繼續下行,直至噴桿懸架各零部件間的間隙消除,噴桿臂達到最低振動位置,在此過程中,噴桿臂受到鋼索向上的阻力,直至噴桿臂向下振動到最低位置1處。隨后反彈,重復上述振動。
根據鋼索約束下噴桿臂振動特點,取單邊噴桿臂CD段進行研究。在整個振動過程中,將噴桿懸架和鋼索作為系統A,噴桿臂作為另一個系統B。整個振動過程由2個振動響應狀態構成。
噴桿臂末端從平衡位置向下振動,鋼索約束噴桿臂向下振動,直至噴桿臂末端到最低位置。隨后,噴桿臂從最低位置向上振動,鋼索收縮速度低于噴桿臂的反彈速度,假設此時鋼索不給噴桿臂施加拉力。并返回到平衡位置,即鋼索約束噴桿臂振動狀態。

圖1 噴霧機及噴桿總成Fig. 1 Sprayer body and boom assembly1.輪胎 2.噴桿臂 3.鋼索 4.噴桿懸架 5.車身

圖2 鋼索約束下噴桿臂振動過程Fig. 2 Process of vibration of spray boom restrained by steel cable1.噴桿臂 2.鋼索 3.噴桿懸架 4.連桿
噴桿臂末端向上振動,鋼索松弛,直至噴桿臂從最高位置返回平衡位置,即噴桿臂處于自由振動狀態。
由于噴桿臂自由振動狀態沒有外力干涉,可以類比為柔性懸臂梁振動,這里不進行討論。本文主要討論鋼索約束噴桿臂振動狀態,由于鋼索的約束力,導致噴桿臂振動產生強非線性和奇異現象,使噴桿臂的動態行為變得十分復雜多樣。當噴桿臂由平衡位置向下振動時,鋼索給噴桿臂施加阻力,當噴桿臂到達最低位置時,鋼索施加在噴桿臂上的力達到最大。當噴桿臂由最低位置向上振動到平衡位置過程中,鋼索給噴桿臂施加拉力,當噴桿臂到達平衡位置時,鋼索拉力消失。噴桿臂由平衡位置向下振動并返回平衡位置的過程類似于給噴桿臂施加一個彈簧阻尼系統[14],見圖3。

圖3 鋼索約束下噴桿臂振動力學模型Fig. 3 Vibration mechanics model of spray boom restrained by steel cable
以噴桿臂靜止時的平衡位置為零點,取鉛垂坐標軸向上為正。噴桿臂的振動方程
(1)
式中:W0(x,t)——噴桿臂運動的撓曲線;
E——噴桿臂彈性模量,Pa;
I——噴桿臂慣性矩,m4;
l——噴桿臂的長度,m;
ρ——噴桿臂的材料密度,kg/m3;
A——噴桿臂橫截面積,m2;
f0(t)——噴桿臂在鋼索連接處受到的垂直方向上的作用力,N;
f1——彈簧阻尼系統受到的垂直方向上的作用力,N;

彈簧阻尼系統的運動方程
(2)
式中:K1——彈簧剛度(噴桿臂懸架和升降機構的等效剛度);
c1——阻尼常數(噴桿臂懸掛和升降機構的等效阻尼);
y1(t)——彈簧阻尼系統位移;
f1(t)——彈簧阻尼系統受到的作用力。
噴桿臂在運動過程中,可能處于噴桿臂不受約束和受約束兩種運動狀態,應當分別滿足的條件
噴桿臂自由振動狀態
f0=0,f1=0,0≤w0
(3)
鋼索約束噴桿臂振動狀態
f0=-f1≥0,0≤w0=y1
(4)
式中:w0——噴桿臂與彈簧阻尼系統接觸點處的位移。
理論分析受鋼索約束噴桿臂振動系統,實質上就是求解式(1)~式(4),而分段線性法求解析解的實質則是:按不同運動接觸狀態的轉換條件,推導出不同接觸運動狀態時的解析解。
1.1 噴桿臂和彈簧阻尼系統的動態特性
為了處理的方便,噴桿臂和彈簧阻尼系統的動態特性都用傳遞函數描述,并且統一用極點-留數格式表達,這可以通過對式(1)和式(2)進行Laplace變換得到
(5)
(6)
式中:Y0(x,s)——噴桿臂撓曲線的Laplace變換;
Y1(s)——彈簧阻尼系統位移的Laplace變換;
F0(s)——噴桿臂接觸碰撞作用力的Laplace變換;
F1(s)——彈簧阻尼系統接觸碰撞作用力的Laplace變換;
U(s)——階躍激勵的Laplace變換。
彈簧阻尼系統的傳遞函數很容易由式(6)得到。
(7)
式中:H1(s)——彈簧阻尼系統傳遞函數;
s1——彈簧阻尼系統極點;
r1——彈簧阻尼系統留數。
噴桿臂的傳遞函數需要通過對式(5)求解得到,其通解
Y0(x,s)=h·a
(8)
其中:h=[cosλxsinλxcoshλxsinhλx]T,
a=[ABCD]T,
代入邊界條件得到
Ma=v
(9)
其中:v=[U(s) 0 0F(s)/λ3]T,通過式(9)的逆形式可求得Y0的通解
(10)
式中:M*——方陣M的代數余子式。
將式(10)整理成傳遞函數形式
Y0(x,λ)=Hu(x,λ)U(s)+HF(x,λ)F(s)
(11)

滿足奇異性1+cosλcoshλ=0的λ序列的λk為一近似等差數列,-λk、-λki、+λki都滿足奇異性條件。與λk對應的振型留數rU(x,λk),rF(x,λk)[15]
(12)
對式(12)進行歸一化處理可以得到
rU(x,λk)=rU(1,λk)Z(x,λk),rF(x,λk)
=rF(1,λk)Z(x,λk)
(13)
式(13)中Z(x,λk)為與λk對應的歸一化振型rU(x,λk)/rU(1,λk)或rF(x,λk)/rF(1,λk)。至此,便可以將傳遞函數HU(x,λ)、HF(x,λ)表示為極點-留數格式
(14)
留數數列rU(1,λk),rF(1,λk)參見表1,可以證明,rF(1,λk)=-rF(1,-λk),rF(1,λki)=rF(1,λk)i。
1.2 鋼索約束下噴桿臂的動態響應分析
噴桿臂的動態響應分析應當有系統動態特征表達、不同接觸狀態的運動分析、不同接觸狀態之間的轉換關系三部分內容,以下的討論假定兩個線性系統是不受限制的一般線性系統。
噴桿臂和彈簧阻尼系統激勵響應關系可以表達
(15)
式中:F0(s)——噴桿臂在碰撞點上所受的力;
F1(s)——彈簧阻尼系統在碰撞點上所受的力;
Y1(s)——彈簧阻尼系統碰撞作用點處位移的Laplace變換;
Y0(n,s)——噴桿臂上彈簧阻尼系統碰撞點處位移的Laplace變換,彈簧阻尼系統在噴桿臂上的碰撞點在n=3l/4處;
HF(n,s)——相對應的傳遞函數;
H1(s)——相對應的傳遞函數;
Hu(n,s)——相對應的傳遞函數;
y0(n,s)——噴桿臂位移響應Laplace變換中的初值響應部分;
y1(s)——彈簧阻尼系統位移響應Laplace變換中的初值響應部分;
U(s)——階躍激勵。
為了分析方便將傳遞函數表示成極點-留數格式
(16)
式中:s0(k)、s1(k)——傳遞函數極點序列;
rF(k)、r1(k)、ru(k)——傳遞函數留數序列;
N0、N1——極點數目;
Z(n,k)——噴桿臂k階極點的振型。
這里暫不考慮無窮多極點和重極點問題。
噴桿臂的運動有懸空和下接觸狀態,其運動狀態的描述、求解及狀態轉換分別討論如下。
1.2.1 噴桿臂懸空狀態分析
噴桿臂處于懸空時接觸力為0,噴桿臂和彈簧阻尼系統的位移響應可以表示為自由響應和激勵響應之和
(17)
式中:A0(k)、A1(k)——與極點對應的自由響應幅值;
Aω——激勵響應幅值;
sω——激勵的留數,sω=iω;
ω——指激勵的頻率,此后的公式中sω和ω的意義相同。
時域響應
(18)
1.2.2 噴桿臂由懸空狀態向接觸狀態轉換
當噴桿臂由自由振動狀態向下與彈簧阻尼系統接觸及處于接觸狀態時,噴桿臂和彈簧阻尼系統應滿足條件
(19)
或Laplace變換
(20)
代入式(15)可以求得F0(s)和Y0(s)
F0(s)=-F1(s)
(21)
式中:δ——噴桿臂處于最高位置時,碰撞點與彈簧阻尼系統之間的距離。
F0(s)和Y0(s)也都可以寫為與彈簧阻尼系統接觸狀態時極點-留數格式

(22)
式中:s01(k)——噴桿臂處于與彈簧阻尼系統接觸狀態時系統的極點,也就是H1(s)+H0(s)的零點;
Af(k)、Afδ、Afω——F0(s)與極點、距離、激勵對應的響應幅值;
Ayo(k)、Ay0δ、Ay0ω——Y0(s)與極點、距離、激勵對應的響應幅值。
式(22)等號兩邊分別同乘以s-s01(k)、s、s-sω。并取極限可求得
(23)
式(23)就是噴桿臂由懸空運動到向下與彈簧阻尼系統接觸運動的狀態轉換關系。其時域響應
(24)
1.2.3 噴桿臂由接觸狀態向懸空狀態轉換
噴桿臂向上振動脫離彈簧阻尼系統時接觸力數值為0,其后的響應可以通過在接觸狀態的響應中減去接觸力引起的響應部分而得到
H0(s)

(25)
式(25)第一式等號兩邊分別同乘以s-s0(k)、s-iω,第二式等號兩邊分別同乘以s-s0(k),取極限可求得噴桿臂與彈簧阻尼系統由接觸進入懸空狀態的Ao(k)、A1(k)、Aδ
(26)
2 鋼索約束下噴桿臂動態響應模擬及驗證
2.1 噴桿臂系統的極點、留數理論值
不受鋼索約束時,噴桿臂的結構保持不變,噴桿臂的材料阻尼取作0.12,傳遞函數按式(14)截取前2階固有頻率進行計算,得到了不受間隙約束時噴桿臂系統的極點、留數序列,如表1所示。
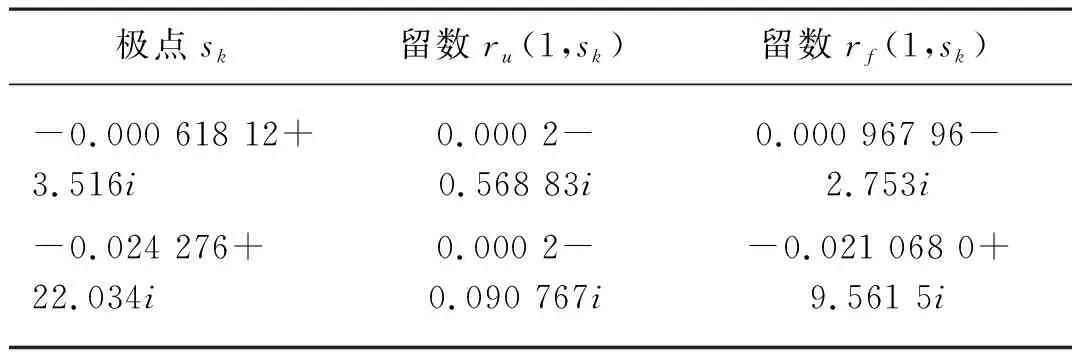
表1 噴桿臂系統的極點和留數的理論值Tab. 1 Theory dates of pole and residue of boom system
2.2 噴霧機參數確定
為了驗證所提出的鋼索約束下噴桿臂振動模型的正確性,選擇SWAN3WP-500自走式噴桿噴霧機噴桿臂進行模型驗證。SWAN3WP-500自走式噴桿噴霧機噴桿臂噴幅為10 m,單邊噴桿臂從車身向外延伸長度為3.5 m。噴桿臂的材料為鋁合金6063-T5,橫截面結構有2種,如圖4所示。噴桿臂工作時,橫截面長邊垂直,短邊水平。本次仿真及實驗所用噴桿臂的橫截面結構為A型。其相關參數如表2所示。

(a) A型
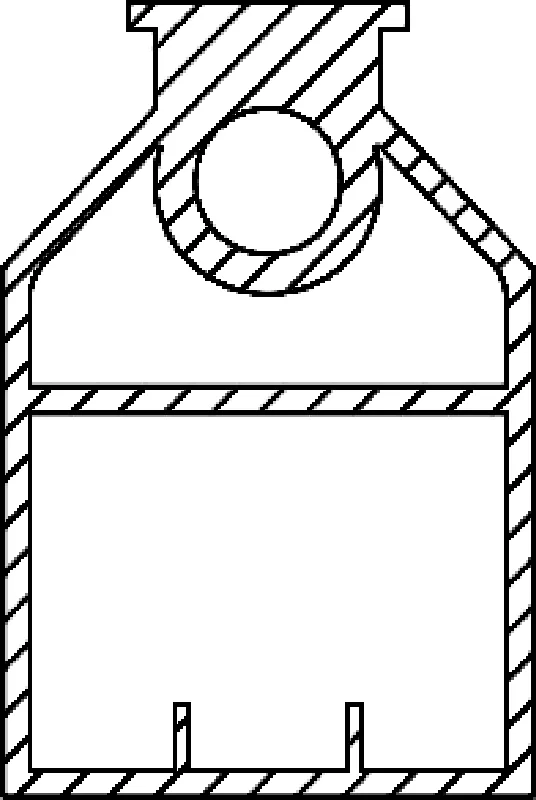
(b) B型圖4 桿臂橫截面結構Fig. 4 Cross-sectional structure of the spray boom
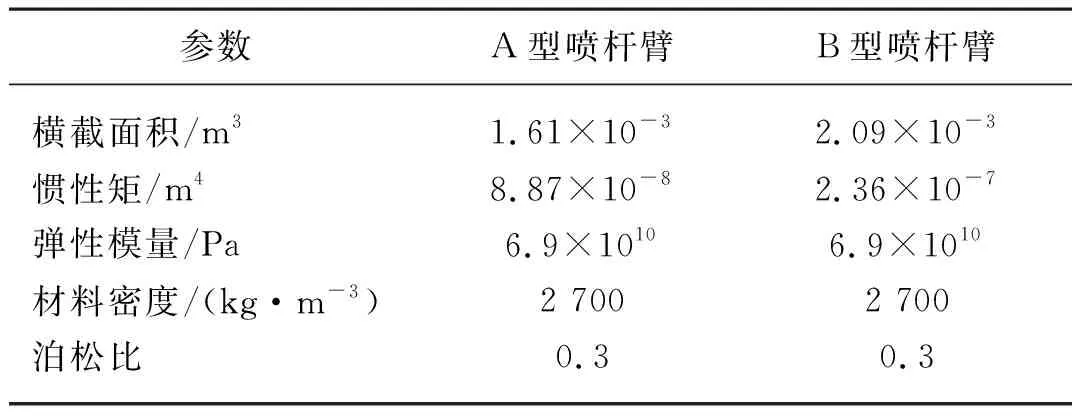
表2 噴桿臂參數表Tab. 2 Main parameters of the spray boom
噴霧機在田間行走時,車輪遇到的障礙物高度或深度一般在100 mm左右,障礙物在噴霧機前進方向上的長度一般在150 mm左右。現設置100 mm、150 mm、200 mm三種幅值和5 Hz、10 Hz兩種頻率的階躍激勵函數。按照表1和表2設置模型相關參數,以第2節建立的鋼索約束下噴桿臂動力學行為模型為基礎,對鋼索約束噴桿臂的動力學行為進行數值仿真計算,噴桿臂動態響應仿真的流程為:首先給出初始的懸空運動狀態A0(k)、A1(k),并求出Aω;依據懸空響應式(18)和接觸發生條件式(19)判斷接觸,并求出懸空階段的運動時間和懸空階段結束時的運動狀態;根據懸空向接觸狀態的轉換關系式(22)求出接觸狀態的初始狀態Af(k)、Afδ、Afω;依據接觸力響應式(23)和接觸終止條件求出接觸階段時間和接觸階段結束時的運動狀態;依據接觸向懸空狀態的轉換條件式(25)求出下一次懸空狀態的初始狀態Ao(k)、A1(k)、Aω;完成一次仿真后再重復(2)~(5)直到仿真結束。仿真流程如圖5所示。
圖6為模擬鋼索約束下的噴桿臂在階躍激勵頻率為10 Hz時,分別在100 mm、150 mm和200 mm三種階躍激勵幅值下的振動情況。從圖中可以發現,當噴桿臂從平衡位置向下振動時,噴桿臂受到鋼索的約束阻力,產生明顯的多次畸變,當噴桿臂由最低位置向平衡位置,以及最高位置反彈時,曲線的畸變明顯減少,表明,在此過程中,噴桿臂受到的是自身變形產生的阻力。當噴桿臂由最高位置向平衡位置振動時,鋼索處于松弛狀態,對噴桿臂不施加約束,曲線畸變較少。另外,曲線隨著激勵幅值的增加,噴桿臂振動的幅度逐步增大,振動衰減的速度在減慢。

圖5 仿真流程Fig. 5 Flow chart of dynamic response simulation of spray boom restrained by steel cable

圖6 模型預測三種階躍激勵幅值下噴桿臂振動情況Fig. 6 Model predicted values of the vibration of the spray boom under three step excitation amplitudes
2.3 鋼索約束下噴桿臂動態響應實驗
為了驗證所提出的數學模型的準確性,搭建了鋼索約束下的噴桿臂振動試驗系統。噴桿臂安裝在兩個液壓缸上,液壓缸控制系統向液壓缸輸出階躍激勵信號。本試驗信號采集系統采用DH5902測試采集系統和Q45u系列超聲波傳感器和50 g單軸加速度傳感器,Q45u系列超聲波傳感器有效檢測距離為0.25~3.0 m,工作溫度范圍為-25 ℃~+70 ℃,采樣上限頻率為100 Hz,靈敏度為100 mV/V。Q45u系列超聲波傳感器和50 g單軸加速度傳感器固定安裝在噴桿臂上鋼索連接處,超聲波傳感器由DH5902測試采集系統提供電源并接受其采集的數據,超聲波傳感器和加速度傳感器實時記錄鋼索約束下的噴桿臂的振動響應情況,噴桿臂振動響應數據最終由計算機上的DHDAS動態信號采集分析系統接受和儲存。
在鋼索約束下的噴桿臂振動試驗系統上獲得了60組噴桿臂振動響應數據。測試得到的有效數據時長均在2.5 s以內,圖7、圖8和圖9分別是噴桿臂在三種階躍激勵幅值下鋼索連接處的典型振動響應曲線。可以發現,當階躍激勵幅值相同時,噴桿臂的振動幅度隨著頻率的增加而減小,進一步證明噴桿臂易受低頻沖擊影響,隔離高頻沖擊的性能。

圖7 階躍激勵幅值為100 mm時噴桿臂振動情況Fig. 7 Vibration of spray boom when step excitation amplitude is 100 mm

圖8 階躍激勵幅值為150 mm時噴桿臂振動情況Fig. 8 Vibration of spray boom when step excitation amplitude is 150 mm
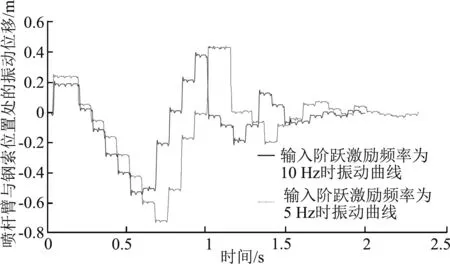
圖9 階躍激勵幅值為200 mm時噴桿臂振動情況Fig. 9 Vibration of spray boom when step excitation amplitude is 200 mm
從圖7、圖8和圖9中可以發現,當噴桿臂從平衡位置向下振動時,噴桿臂受到鋼索的約束阻力,產生多次急停震蕩,當噴桿臂由最低位置向平衡位置,以及最高位置反彈時,噴桿臂的急停震蕩很少,在此過程中,噴桿臂受到的是自身變形產生的阻力。當噴桿臂由最高位置向平衡位置振動時,鋼索處于松弛狀態,對噴桿臂不施加約束,曲線畸變較少。
2.4 鋼索約束下噴桿臂動態響應模型驗證
圖10~圖12是噴桿臂分別在100 mm,150 mm和200 mm三種階躍激勵幅值下經過障礙物時實測噴桿臂鋼索連接處振動響應和所建模型預測結果的對比圖。
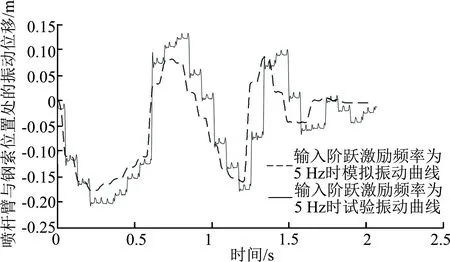
圖10 階躍激勵幅值為100 mm時噴桿臂鋼索連接處振動響應與模擬預測結果對比Fig. 10 Comparison results of the vibration response at the steel cable connection of spray boom and the simulation prediction results when the step excitation amplitude is 100 mm

圖11 階躍激勵幅值為150 mm時噴桿臂鋼索連接處振動響應與模擬預測結果對比Fig. 11 Comparison results of the vibration response at the steel cable connection of spray boom and the simulation prediction results when the step excitation amplitude is 150 mm
三種激勵幅值下模型仿真結果與實測結果的相關系數最小值為階躍激勵幅值為200 mm時的0.910 4。可以發現,實測噴桿臂鋼索連接處振動波形畸變波形較多,且較明顯,每個波峰和波谷均出現了明顯的摩擦削頂現象,模型預測曲線波形具有畸變趨勢,每個波峰和波谷均出現摩擦削頂趨勢。實測噴桿臂振動波形較模型預測波形,在振動后期有周期變大的趨勢。造成這些區別的主要原因是實測噴桿臂在經受階躍激勵驅動時,各相關部件間存在無法預測的隨機碰撞摩擦。模型預測與實測值的最大誤差分別出現在階躍激勵幅值為100 mm時向上的振動和階躍激勵幅值為200 mm時向下的振動,向上的誤差為0.047 3 m,向下的誤差為0.058 2 m,均在合理范圍內。模型可以有效預測鋼索約束下噴桿臂振動情況。

圖12 階躍激勵幅值為200 mm時噴桿臂鋼索連接處振動響應與模擬預測結果對比Fig. 12 Comparison results of the vibration response at the steel cable connection of spray boom and the simulation prediction results when the step excitation amplitude is 200 mm
3 結論
1) 建立鋼索約束的下噴桿臂動態響應理論模型,并搭建了鋼索約束下的噴桿臂振動試驗系統,分別在100 mm、150 mm、200 mm等三種激勵幅值下模型仿真結果與實測結果的相關系數最小值為階躍激勵幅值為200 mm時的0.910 4。模型預測與實測值的最大誤差分別出現在階躍激勵幅值為100 mm時向上的振動和階躍激勵幅值為200 mm時向下的振動,向上的誤差為0.047 3 m,向下的誤差為0.058 2 m,均在合理范圍內。驗證了所提出的鋼索約束的下噴桿臂動態響應理論模型的準確性。
2) 分析噴桿臂在不同階躍激勵幅值和不同階躍激勵頻率下的振動情況,結果表明鋼索對由平衡位置向下振動的噴桿臂有明顯約束,導致噴桿臂在由平衡位置向下振動過程中有短暫急停振蕩現象,進一步增加了噴桿臂的振動。隨著階躍激勵頻率的增大,噴桿臂鋼索連接處振動的幅度和周期均減小。隨著階躍激勵幅值的增大,噴桿臂鋼索連接處的振動幅值和周期均增大。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00