基于梯度下降搜索法的IPMSM最大轉矩電流比控制
2022-08-12 04:19:08楊宇健趙世偉楊向宇
微特電機 2022年7期
關鍵詞:實驗
楊宇健,趙世偉,楊向宇
(華南理工大學 電力學院,廣州 510640)
0 引 言
風機、水泵廣泛應用于生產生活的各個領域,其動力源大部分是異步電機,電能利用率較低。相較于傳統的異步電機,內置式永磁同步電機(以下簡稱IPMSM) 具有效率高、結構簡單、體積小等優點,在該領域有廣泛的應用前景。但現有的控制策略常采用id=0控制,在電機運行過程中往往不能有效利用其磁阻轉矩。最大轉矩電流比(以下簡稱MTPA) 控制策略可以合理地分配直軸和交軸電流的值,使得在相同的電樞電流下,產生的電磁轉矩最大[1]。MTPA控制對于減小電能損耗、進一步提高恒轉矩負載類電機的運行效率有著較大的意義。
目前,對于MTPA的實現策略可以分為離線方法和在線方法[2]。MTPA的離線方法包括查表法、公式法、多項式擬合法等,離線算法需要準確的電機參數和模型,對電機參數的變化較為敏感[3]。在線方法包括搜索法、信號注入法、參數辨識法等。信號注入法通過向電機的定子繞組中注入高頻小電流信號實時追蹤 MTPA 工作點,但依賴電機參數的準確性[4]。參數辨識法可以在線辨識電機的d,q軸電感參數[5],但在線計算量較大。在線搜索法可以擺脫對電機參數的依賴,計算量小,具有較高的魯棒性[6]。搜索法多采用定步長的方式,文獻[7]指出,搜索法在負載轉矩快速變化時可能會失效,搜索法的的動態性能與穩定性仍有待提高。文獻[8]改善了搜索法使能機制,可使搜索法在面對IPMSM的工況變化時具有良好的動態性能。文獻[9]分析了定步長搜索法應用于IPMSM調速系統中的穩定性,為調速系統使用該方法提供了理論依據。文獻[10]結合了多項式擬合法提出的變步長搜索法,可以加快算法的收斂速度,同時改善動態性能,但其精度依賴于的擬合的函數。文獻[11-13]將最優化的理論應用于搜索法,也可加快收斂速度,然而算法的復雜度有所增加。
本文結合恒轉矩負載類電機的應用場景,分析了其穩定工作時的恒轉矩曲線特性,采用基于梯度下降法的搜索法方案實現MTPA控制。并在傳統梯度下降法的基礎上,結合電機運行的實際狀況對步長加以改進,實現對MTPA工作點的追蹤。
1 IPMSM的MTPA控制
對IPMSM而言,其d,q軸的電壓方程可以寫成:
(1)
式中:Ld,Lq分別為直軸電感和交軸電感;ψf為永磁體磁鏈;Rs為定子繞組電阻;id,iq為直軸和交軸電流。電磁轉矩方程:
(2)
交軸電流iq、直軸電流id和電樞電流is之間的關系:
(3)
式中:θ為電流矢量角。將電磁轉矩表達式寫成與定子電流和電流矢量角相關的表達式如下:

(4)
運動方程:
(5)
式中:TL為負載轉矩;J為轉動慣量;B為摩擦系數;ωm為電機轉速。
式(4)表明,當輸出電磁轉矩一定時,存在一個最優的電流矢量角θ,使得定子電流is幅值最小。對調速系統而言,采用MTPA控制可以提高電機的運行效率。
從式(4)出發,對電流矢量角求偏導,并忽略電機參數的偏導值,可得:
(6)
2(Ld-Lq)iscos2θ+ψfcosθ-(Ld-Lq)is=0
(7)
對式(7)的一元二次方程求解,可得最優電流矢量角:
(8)
式(8)表明,最優電流矢量角的值由電機的d,q軸電感和永磁體磁鏈決定,MTPA曲線在d,q電流坐標軸上的軌跡如圖1所示。
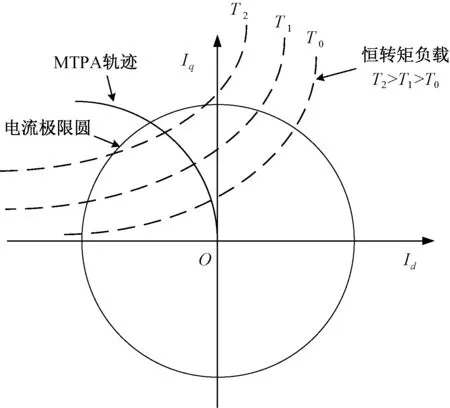
圖1 MTPA運行軌跡
在電機實際運行過程中,采用式(8)計算MTPA工作點對電機參數的依賴性較大,而電機參數的測量往往需要較大工作量,不利于MTPA控制的工程應用。
2 梯度下降搜索法工作原理
對于風機、水泵等恒轉矩負載的電機,當其工作在穩態時,可以認為輸出的電磁轉矩Te恒定。此時的MTPA 問題是如何在一定的電磁轉矩下,跟蹤其定子電流的最小值點。定義目標函數為定子電流is的大小,變量為電流矢量角θ,對于在某恒轉矩區工作的電機,MTPA 問題可等效為有約束條件的非線性規劃問題:

(9)
此時定子電流is和電流矢量角θ滿足一定的映射關系,對式(4)求解電流is的解析式可得:
(10)
電流矢量角θ的工作范圍為(90°,180°),可以看出,目標函數is(θ)是以輸出電流矢量角θ為自變量的一元非線性函數。電機工作的恒轉矩曲線如圖2所示,其中定子電流變化量的梯度為▽is=Δis/Δθ。圖2中,以MTPA工作點θMTPA為分界線,當電機工作點位于分界線左側時,其定子電流變化量的梯度▽is<0;當工作點位于分界線右側時,其定子電流變化量的梯度▽is>0;當電機工作在MTPA工作點附近時,曲線的斜率越來越平緩,達到MTPA工作點時,則有▽is=0。

圖2 恒轉矩區工作下的電機is-θ曲線
綜合上述分析的曲線特性,本文擬采用梯度下降法的策略對MTPA工作點進行搜索。梯度下降法的思想是沿著目標函數的梯度方向進行搜索,直至找到目標函數的極值點。采用梯度下降搜索法的收斂過程步驟如下:
(1)選擇初始值θ0為初始的電流矢量角,Δθ0為初始步長,置k=0;
(2)以θk+1=θk+Δθk更新電流矢量角,待系統穩定后計算梯度▽is(θk);
(3)ε為允許的最小誤差,如果|▽is(θk)|<ε,則停止迭代,輸出θ*=θk+1,否則轉到步驟(4);
(4)以迭代公式Δθk+1=-t▽is(θk)更新搜索步長,t為系統學習率,k=k+1,回到步驟(2)。
上述梯度下降搜索法的迭代收斂過程流程圖如圖3所示。
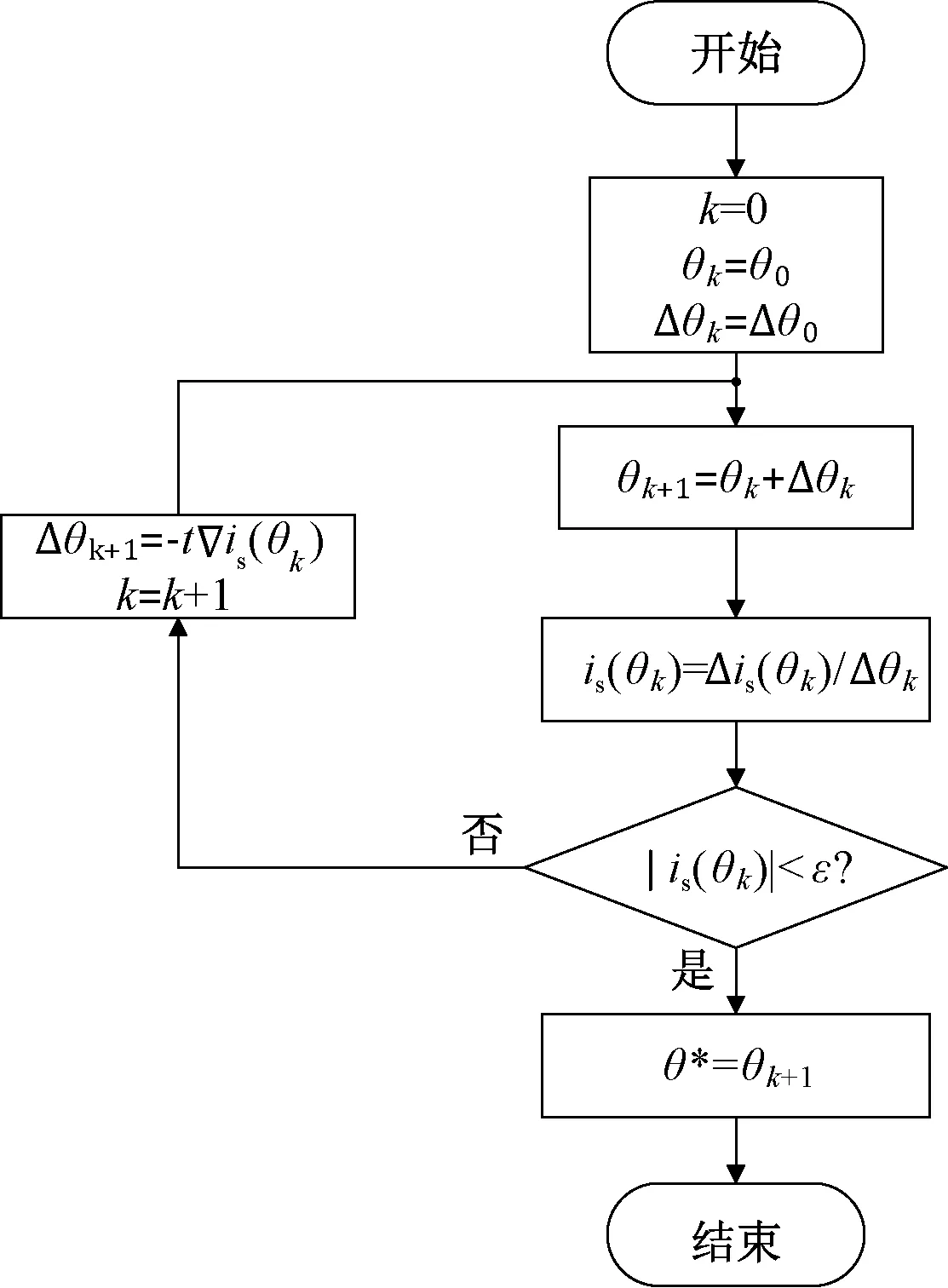
圖3 梯度下降搜索法流程圖
梯度下降法的步長Δθ是決定算法收斂速度和準確率的關鍵參數。若步長設置過小,雖能獲得良好的準確率,但同時會導致算法收斂速度變慢;而步長設置過大,算法前期會快速運行,但到后期會在極值點附近產生振蕩,阻礙算法收斂。針對電機的實際運行狀況,本文對傳統的梯度下降法步長進行如下改進:
(11)
式中:b為最小步長。在工作點遠離MTPA工作點時,采用隨機梯度下降法,式(11)中t為常數。當接近MTPA工作點時,由于系統的梯度變化不明顯,此時改用定步長的方式進行搜索。
實際應用梯度下降法對工作點進行追蹤時,需保證電機的工作點處于一條恒轉矩曲線上。因此,應在電機處于穩態工作一段時間后再啟用搜索法,并且由于電流環存在一定的調節過程,搜索法的控制周期不能設定得太短,具體時間需結合工程實際設置。
3 仿真結果及分析
為驗證上述控制策略的有效性,利用MATLAB/Simulink搭建了系統仿真模型。仿真實驗的電機參數如表1所示。
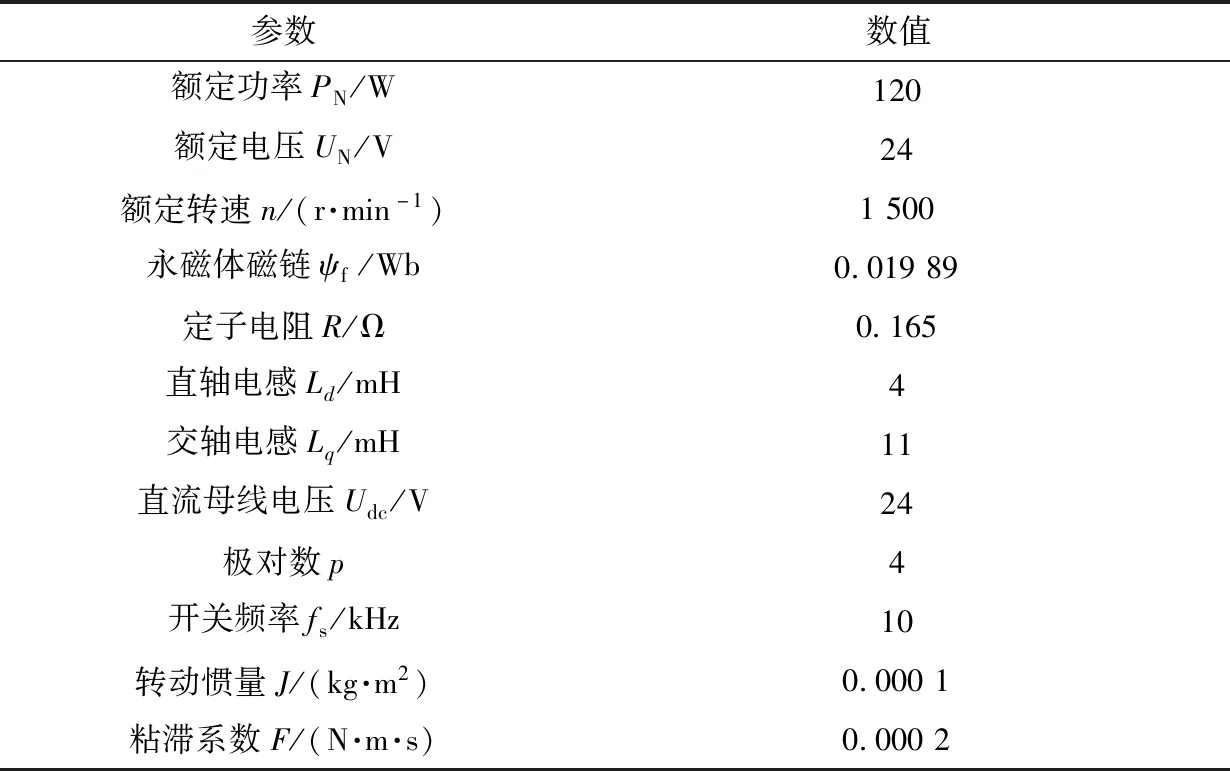
表1 PMSM部分參數
下面仿真驗證電機在起動和突加負載后,梯度下降搜索法對MTPA工作點的追蹤過程。其中系統的仿真時間為3 s,初始負載轉矩為0.1 N·m,在1 s時突加負載為0.2 N·m,參考轉速為1 000 r/min。初始電流矢量角為90°,初始步長Δθ0=3°,搜索法控制周期為0.06 s,系數t=125,b=1°,允許的最小誤差ε=0.005,仿真實驗的波形如圖4所示。

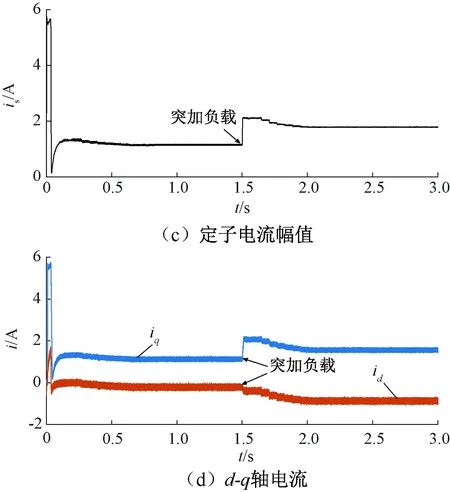
圖4 梯度下降搜索法仿真波形
圖4(b)顯示電機在起動后,于0.27 s時開始搜索MTPA工作點,最終在0.63 s時收斂于100.7°,搜索時間為0.36 s。圖4(c)給出了定子電流幅值變化曲線,定子電流幅值從1.32 A減小到了1.14 A,電流幅值下降了約13.7%。
電機在突加負載后,轉速出現短暫的下降,其余時間基本維持在1 000 r/min。圖4(b)顯示,突加負載后在1.64 s時開始搜索MTPA工作點,最終在2 s時收斂于120.2°,搜索時間為0.36 s。觀察定子電流變化曲線,在系統突加負載后,梯度下降搜索法實現了MTPA工作點的追蹤,電流幅值從2.1 A減小到了1.78 A,電流下降了約15.3%,實現了電機運行效率的優化。
為驗證梯度下降搜索法對MTPA工作點的追蹤性能,采用傳統的定步長搜索法進行對比實驗,其中定步長大小為1°,其余的實驗條件和梯度法相同,仿真波形如圖5所示。
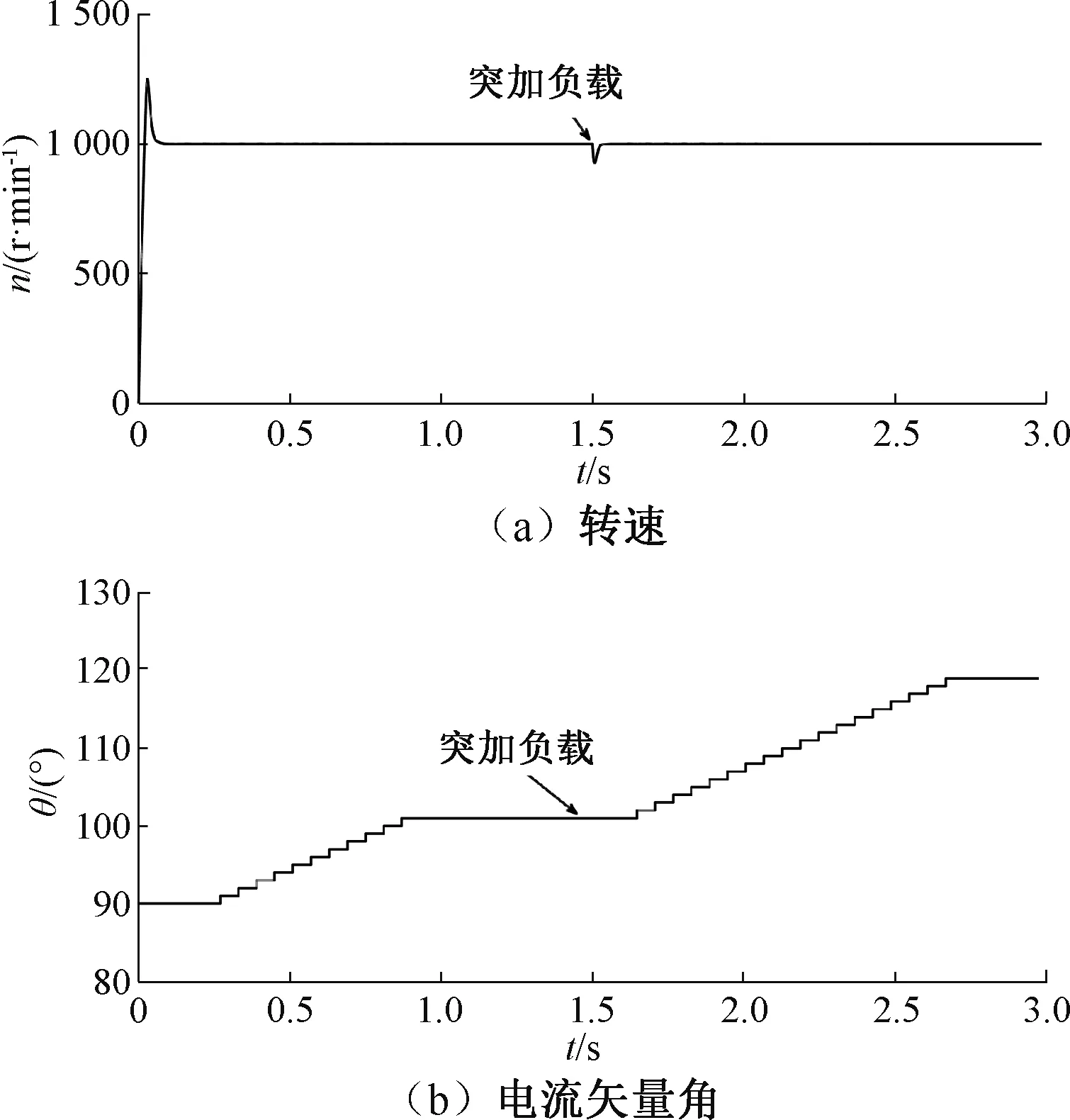

圖5 定步長搜索法仿真波形
圖5(b)顯示,電機起動后,定步長搜索法在0.27 s時開始搜索MTPA工作點,最終在0.87 s時收斂于101°,搜索時間為0.6 s。突加負載后,定步長搜索法在1.64 s時開始搜索MTPA工作點,最終在2.66 s時收斂于119°,搜索時間為1.02 s。
對比圖4和圖5的仿真結果可知,電機起動后,梯度下降搜索法相較定步長搜索法搜索時間減少了58.6%,突加負載后的搜索時間減少了64.7%,在搜索速度上具有明顯優勢。兩種算法在搜索過程中的電流波形平穩,且轉速未出現較大波動,可以認為輸出的電磁轉矩穩定。對比圖4和圖5的定子電流幅值和d,q軸電流波形,定步長搜索法的電流變化趨勢相對梯度下降搜索法較為緩慢,因此梯度下降搜索法具有更快的響應速度。
4 實驗結果及分析
實驗平臺如圖6所示,由直流無刷電機、直流電源、磁粉制動機以及基于STM32微控制器為核心搭建的驅動器組成,實驗數據的采集通過串口通信協議傳輸至上位機平臺,如圖6所示。實驗所用的電機參數和仿真相同。

圖6 實驗平臺
實驗驗證了電機在參考轉速為1 000 r/min,在空載起動以及外界突加負載的情況下,梯度下降搜索法對MTPA工作點的追蹤過程。其中,電流矢量角的初始值為90°,初始步長Δθ0=3°。由于電流環存在一定的調節過程,搜索法的周期設定為0.3 s,并且對采集的定子電流做了適當的濾波處理,實驗波形如圖7所示。

圖7 梯度下降搜索法實驗波形
觀察圖7波形可知,電機起動并到達1 000 r/min后,于2 s時開啟對MTPA工作點的搜索,并在4.1 s時收斂于100.5°,搜索時間為2.1 s。相比于id=0控制,電流從1.56 A減小到1.28 A,電流下降了約18%。實驗于7.6 s時突加負載,電機轉速出現短暫波動后重新穩定在1 000 r/min,待電機穩定運行一段時間后于8.6 s時開啟對新工況下MTPA工作點的搜索,并在11.6 s時收斂于119°,搜索時間為3 s,定子電流大小從2.13 A減小到1.5 A,電流下降約29.6%。
采用定步長搜索法進行對比實驗,其中定步長大小為1°,其余的實驗條件和梯度法相同,實驗波形如圖8所示。

圖8 定步長搜索法實驗波形
電機起動后,定步長搜索法在2.7 s時開始搜索MTPA工作點,并在6 s時收斂于101°,搜索時間為3.3 s。突加負載后,定步長搜索法在11.1 s時開始搜索MTPA工作點,最終在16.5 s時收斂于119°,搜索時間為5.4 s。
由實驗結果可知,梯度下降搜索法在電機起動后的搜索時間比定步長搜索法減少了36.3%,突加負載后的搜索時間減少了44.4%,相較傳統搜索算法在收斂速度上提升明顯。觀察兩種算法的實驗電流波形可知,在搜索最優電流矢量角的過程中電機轉速均未出現較大波動,輸出的電磁轉矩平穩。對比兩種算法的實驗電流波形可知,在搜索精度相同的情況下,梯度下降搜索法相對傳統算法的電流變化趨勢更加明顯,響應速度更快。
5 結 語
對應用于恒轉矩負載場景的IPMSM,本文分析了其工作時的恒轉矩曲線特性,提出了一種基于梯度下降搜索法的控制方案,以實現對電機運行過程中MTPA工作點的追蹤,并結合電機運行的具體情況對傳統的梯度下降法的步長進行了優化。本文算法不依賴電機參數,便于在工程應用中推廣。
仿真和實驗結果表明,基于梯度下降搜索法可以有效實現MTPA控制,對MTPA工作點具有良好的追蹤性能。本文方案有利于恒轉矩負載工作的電機在其長期運行過程中節約電能,實現效率優化。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
