基于模糊聚類和專家評分機制的無人機多層次模塊劃分方法
2022-08-17 09:44:42楊建峰肖和業白俊強董維浩
系統工程與電子技術 2022年8期
楊建峰, 肖和業, 李 亮, 白俊強,*, 董維浩
(1. 西北工業大學航空學院, 陜西 西安 710072; 2. 中國人民解放軍95889部隊, 甘肅 酒泉 735018)3. 西北工業大學無人系統技術研究院, 陜西 西安 710072)
0 引 言
隨著“蜂群”概念的興起,無人機集群因其潛在的巨大應用價值得到快速發展,由此帶來模塊化無人機的關注度也越來越高。模塊化無人機通過模塊拆解、更換等方式實現了其功能與多樣化任務需求的精確匹配,不僅減少了設計、制造成本,還縮短了無人機制造周期和戰時維修時間,模塊化是無人機未來發展的重點方向。Herbert和Alexander最先討論了模塊化思想,經過學者研究拓展,模塊化思想得以發展。無人機模塊劃分方法是面向任務構造合理、可重構的模塊化構型的理論基石,是詮釋無人機各模塊選擇及形成機制的重要手段,隨著模塊化無人機不斷發展,其重要性不言而喻。目前,模塊化無人機設計理論和方法側重于概念設計層面,例如,Rinauto等結合離線可重構無人機概念提出一種基于對象的無人機模塊化設計框架;李春鵬等從氣動設計角度入手研究了無人機模塊化布局方法。現有模塊化無人機偏向于經驗設計,尚無一種模塊劃分方法可有效地指導模塊化無人機設計,例如,華厚強通過優選零部件并結合實驗測試設計出一種模塊化低空長航時無人機,需要模塊化劃分方法促使無人機模塊化設計由依賴經驗指導向理論化的系統設計轉變。這一問題不僅來源于模塊化無人機任務需求的多樣化及零部件的復雜性,還由于無人機模塊劃分評價指標缺少專業性評價。為此,本文面向無人機任務需求,結合其構成特點,基于“模糊聚類+智能算法”相結合的模塊劃分方法,引入基于劃分指標的專家評分機制,構建了新的模塊劃分流程,探索一種契合無人機特點的模塊劃分方法,用于指導無人機零部件聚類,不僅為無人機模塊劃分提供了新的理論方法,還在設計層面上確保模塊化無人機的實用性和合理性。
本文首先以功能、結構、電氣和保障等4個方面相關性為基礎,構造無人機主要零部件綜合相關性矩陣,以此作為輸入,基于層次分析的模糊聚類(hierarchical fuzzy clustering, HFC)算法,形成模塊劃分備選方案。然后,采用多級模糊綜合評價法,邀請無人機領域專家進行評分,從備選方案中篩選出最佳方案。結合模糊C均值聚類算法、改進粒子優化群算法各自優勢,基于模糊C均值聚類的改進粒子群優化算法(improved particle swarm optimization based on fuzzy C-means, IPSO-FCM),得到最優的模塊劃分結果,最終形成適合無人機的多層次模塊劃分方法。最后,本文分別以一次性使用無人機、可重復使用無人機為例,進行零部件模塊劃分,驗證提出的無人機模塊劃分方法的有效性和合理性。
1 無人機模塊劃分方法
本文將從構建關聯矩陣、模塊初步劃分、模糊綜合評價、模塊精準劃分等4個方面闡述無人機模塊劃分方法。劃分流程為:
(1) 構建關聯矩陣。針對無人機功能要求,機械、電氣構造特點,使用與貯存需求,建立功能、結構、電氣、保障等4類相關性子矩陣,結合不同模式無人機特點,通過加權計算,構造具有無人機特性的綜合相關性矩陣;
(2) 模塊初步劃分。采用HFC聚類方法,以綜合相關性矩陣為輸入,通過傳遞閉包法,獲得模糊等價矩陣,按照閾值進行聚類,繪制聚類樹狀圖,獲得模塊劃分備選方案;
(3) 模糊綜合評價。以備選方案作為待評價集,構造無人機模塊劃分評價指標網絡層次結構模型并建立評判因素集,在模塊劃分指標評價體系中引入專家評分機制,構建無人機各級指標權重集,通過多級模糊綜合評價,在模塊劃分初步方案集中獲得最佳備選方案;
(4) 模塊精準劃分。基于改進的粒子群優化算法代替模糊C均值聚類算法中原有的迭代邏輯,并構建迭代框架,其適應度函數采用模糊C均值聚類算法中的FCM函數,以最佳備選方案為變量中心,通過模糊C均值聚類法與改進的粒子群算法相融合的算法,獲得最佳模塊劃分方案。
模塊劃分具體流程如圖1所示。
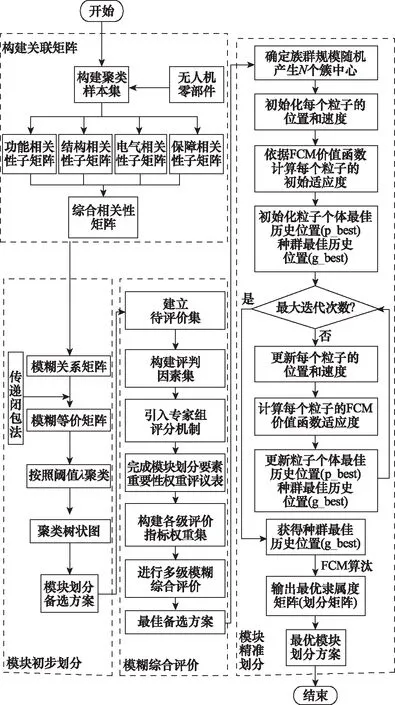
圖1 無人機模塊劃分流程Fig.1 Unmanned aerial vehicle module partition process
1.1 無人機相關性矩陣內涵及定義
1.1.1 關聯因子定義
無人機屬于復雜的機電類產品,對其進行關聯因子定義,借鑒現有研究中對機電類產品的功能、結構、電氣關聯因子的定義及賦值范圍,同時考慮無人機多種任務特點及在貯存、測試、維修等環節都有特殊要求,在原有功能、結構、電氣等關聯因子基礎上增加了保障關聯因子。因此,將無人機的關聯因子分為功能、結構、電氣、保障等4類,其定義如表1所示,其中,?(,)、?(,)、?(,)、?(,)分別表示零部件和零部件之間的功能、結構、電氣和保障相關性。

表1 無人機模塊關聯因子
112 綜合相關性矩陣
本文采用層次分析法確定各關聯因子的權重,評分標準如表2所示。
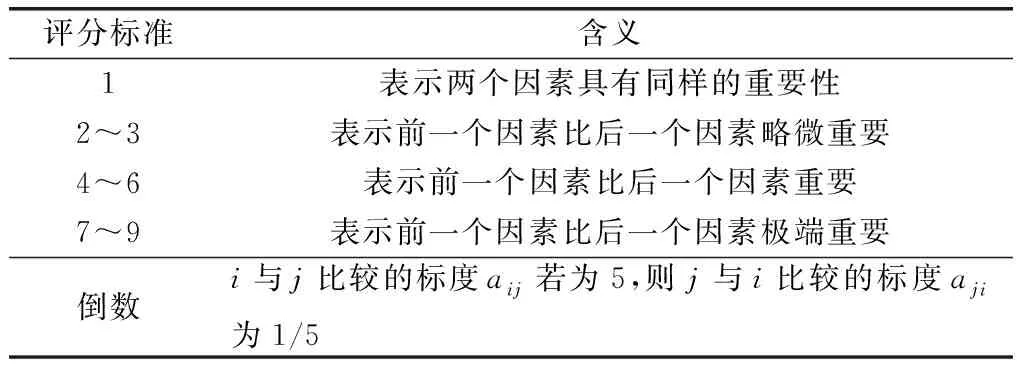
表2 評分標準
基于上述4類關聯因子對應的子相關性矩陣,結合各自的權重系數,可得綜合相關性矩陣:
={}×
=*?(,)+*?(,)+*?(,)+*?(,)
式中:表示零部件與零部件之間的綜合相關系數;、、、分別表示功能、結構、電氣、保障等相關性權重系數。
1.2 基于HFC算法的模塊初步劃分方法
基于無人機零部件集合,使用傳遞閉包法,將綜合相關性矩陣改造成模糊等價矩陣,以為對象,采用HFC算法,獲得不同閾值對應的劃分方案,按照閾值由大到小的順序,依次求得對應的劃分方案并進行綜合,形成隨閾值變化的聚類樹狀圖。

1.3 基于專家評分機制的模糊綜合評價
Zadeh等提出了模糊綜合評價法,用于分析具有模糊現象的問題,無人機模塊劃分本就具有模糊性,劃分的方案孰優孰劣沒有絕對的判定準則。因此,采用模糊綜合評價法,可以很好地解決這一問題。
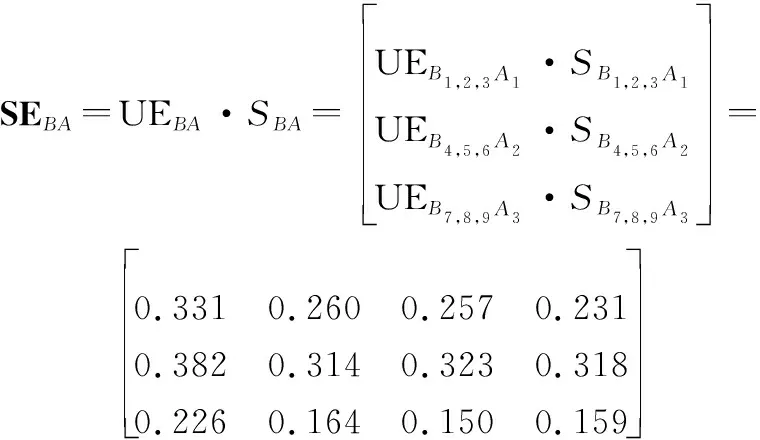
首先,建立評估對象集合,即評價集,本文將模塊初步劃分后的備選方案作為評價集;然后,構建影響評價對象的因素集合,即因素集,本文針對模塊劃分影響要素的重要程度,構建了3大類重要性指標因素(A層指標),并細化出影響無人機模塊劃分的9個要素(B層指標);同時,基于評價指標層級,結合各指標的重要程度,采用網絡層次分析法,構造指標網絡層次結構模型(見圖2),建立指標權重集UE;最后,進行多級模糊綜合評價,構建關聯評價矩陣,建立模糊綜合決策集SE。
SE=UE°
則SE中數值最大的對應方案即為最優備選方案。
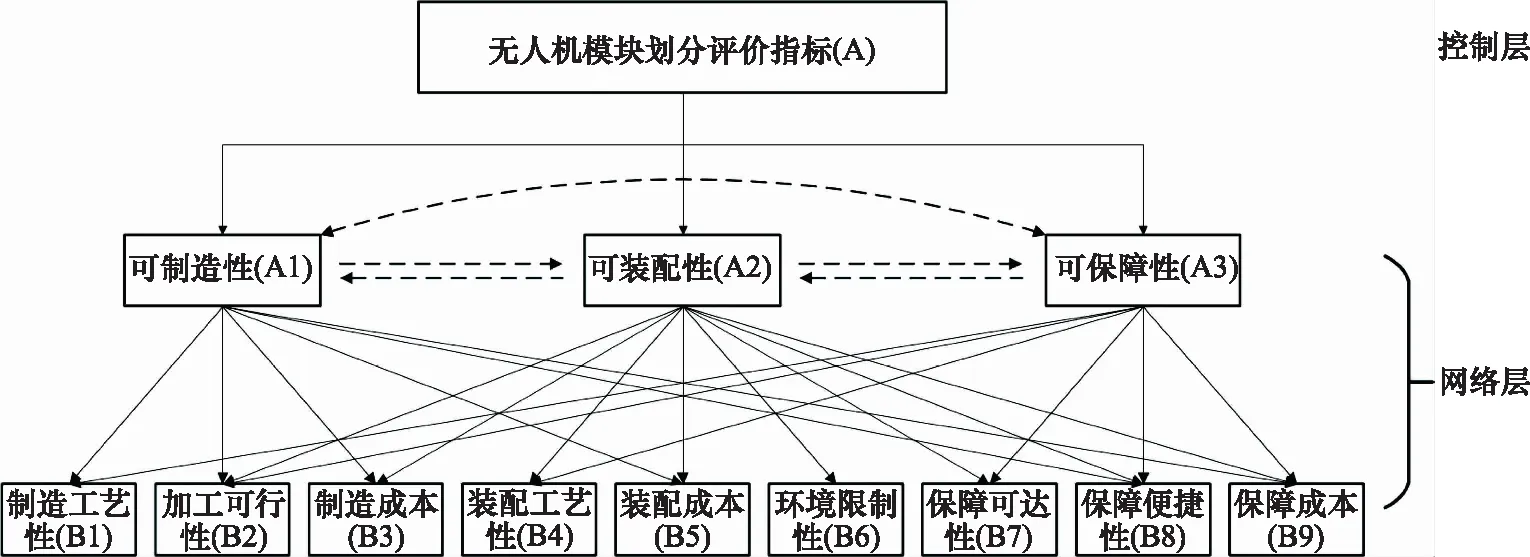
圖2 無人機模塊劃分評價指標網絡層次結構模型Fig.2 Hierarchical structure model of evaluation index network for unmanned aerial vehicle module partition
關聯評價矩陣為
其中,為關聯系數,計算公式為

式中:表示分辨系數,取值區間為(0,1),通常取=05;et為評價集對因素集的最優參考序列;et為評價集對因素集的比較序列。
模糊綜合決策集SE中的元素體現的是對評價集中的劃分方案的評價結果,二者一一對應,數值最大的元素對應的劃分方案即為最佳的備選方案。
網絡層次分析法的關鍵在于確定各指標之間的間接優勢度,得到比較矩陣。為確保客觀反映各指標間的權重關系,本文引入了專家評分機制,通過邀請無人機設計領域專家,確保結果的準確性。
為此,制定了《無人機模塊劃分要素重要性權重評議表》,邀請專家組進行評分:
={,,…,}
其中,為第個專家,且≥3,基于評價指標層次模型,依據表2的標準進行優勢度評議,通過評分得到個比較矩陣,進而獲得各指標間的加權超矩陣,確定各指標權重。
同時,為降低專家評分的主觀因素影響,采用基于專家信度的方法,考慮評分專家的職稱、從事專業和從業年限等要素,設置信度評分標準(見表3),采用層次分析法,確定每個影響因素的權重,綜合得到個專家的評分質量值(=1,2,…,)。
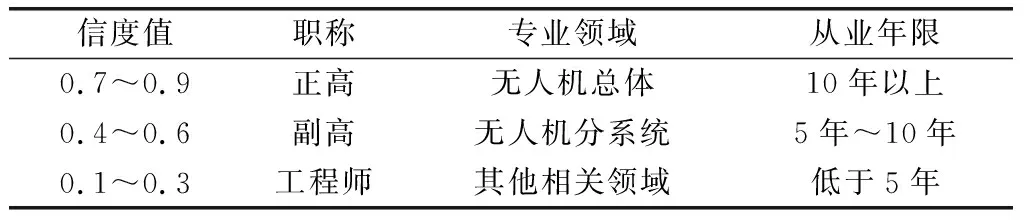
表3 專家評分質量標準
然后,計算專家信度系數:
式中:=(,,…,);值越大表示專家的權威性越大,其所占權重越大。因此,專家的評價權重可表示為
則個專家的權重集為
EX=(ex,ex,…,ex)
根據專家(=1,2,…,)的評分,經過計算獲得對應的各指標權重:
UE=(ue1,ue2,…,ue)
結合專家權重,得到最終的指標權重集:
UE=(ue,ue,…,ue)
其中,

1.4 基于IPSO-FCM算法的模塊精準劃分方法
依據第13節得出的最佳備選方案,采用IPSO-FCM算法進行進一步精準劃分,確定各模塊與無人機零部件之間的對應關系,獲得最終的模塊劃分方案。IPSO-FCM算法以改進的粒子群算法為迭代框架,適應度函數采用FCM價值函數的方式進行尋優,采用“聚類中心→隸屬度矩陣→價值函數”的順序計算粒子適應度。
初始化聚類中心。根據模塊粗劃分方案和模糊綜合評價結果,確定需要劃分的模塊數以及具體的模塊=(,,…,),聚類中心(=1,2,…,)的初值分別從對應的模塊(=1,2,…,)中隨機選取,組成初始聚類中心矩陣=(,,…,),即粒子的初始位置。
更新隸屬度矩陣。隸屬度函數表征每個樣本屬于每個模塊的程度,隸屬度矩陣可表示為
={}
式中:=1,2,…,;=1,2,…,;表示第個指標樣本隸屬于第個簇類的隸屬度,且有
依據初始化的聚類中心,計算得到初始的隸屬度矩陣。

計算價值函數。根據初始隸屬度矩陣和初始聚類中心矩陣,計算獲得對應的初始價值函數,即為粒子的初始適應度值。

通過IPSO-FCM算法迭代,獲得最小的價值函數值()(1≤≤,為最大迭代次數)對應的隸屬度矩陣(),依據隸屬度大小,將全部樣本劃分成個模塊,即為最終的模塊劃分方案。
2 無人機模塊劃分實例驗證
在上述模塊劃分方法的基礎上,以一次性使用、可重復使用等兩類無人機平臺為研究對象,通過實例分析,驗證所提方法的合理性和可行性。
2.1 一次性使用無人機平臺
211 主要零部件組成
一次性使用無人機平臺較為簡單,具備可消耗、低成本等特點,多用于集群作戰,一般包括機體、飛行控制系統、動力系統、通訊系統、降落系統和載荷等。本文將對該類無人機零部件進行細化,構建初始樣本集。一次性使用無人機零部件示意如圖3所示,編號對應零部件具體如表4所示。
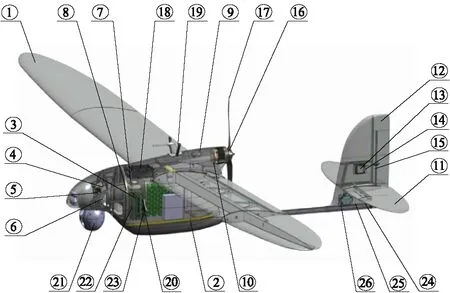
圖3 一次性使用無人機組成示意圖Fig.3 Disposable unmanned aerial vehicle composition diagram
表4 一次性使用無人機主要零部件組成表
2.1.2 模塊劃分
(1) 建立綜合相關性矩陣
構建功能、結構、電氣、保障等4個子相關性矩陣,經計算,確定其權重分別為0.29,0.30,0.29,0.12。經過加權計算,得到綜合相關性矩陣。
(2) 模塊初步劃分
以綜合相關性矩陣作為模糊相似矩陣,通過傳遞閉包法,將其轉換為模糊等價矩陣,并繪制聚類樹狀圖,如圖4所示。
圖4 一次性使用無人機模塊劃分聚類樹狀圖Fig.4 Cluster tree diagram of disposable unmanned aerial vehicle module partition
基于理想模塊數原則,確定將模塊數為4、5、6、7的方案作為備選方案,具體劃分方案如圖5所示。
圖5 一次性使用無人機模塊初步劃分方案Fig.5 Preliminary partition scheme of disposable unmanned aerial vehicle modules
(3) 模糊綜合評價
邀請10名無人機設計領域專家進行評分。經計算,10位專家的評價權重分別為0.100 1、0.094 2、0.133 9、0.159 7、0、0.087 0、0.121 6、0.189 1、0.027 4、0.087 0,即采信除權重為0的專家以外的其余9位專家。經過加權計算,各指標層最終的權重見表5。
表5 各層級指標權重
由于無人機指標層次模型為兩級指標,故采用兩級模糊綜合評價。首先,建立一級模糊綜合決策集。
然后,以作為二級模糊綜合評價的模糊關系矩陣,參照一級評價的步驟,得到二級模糊綜合決策集。

上述結果表明,經過兩級模糊綜合評價,方案1為最優備選方案,即將無人機零部件劃分為7個模塊。
(4) 模塊精準劃分
經過迭代運算,在90步左右收斂到最優解,迭代收斂曲線如圖6所示,零部件最終劃分方案如圖7所示。
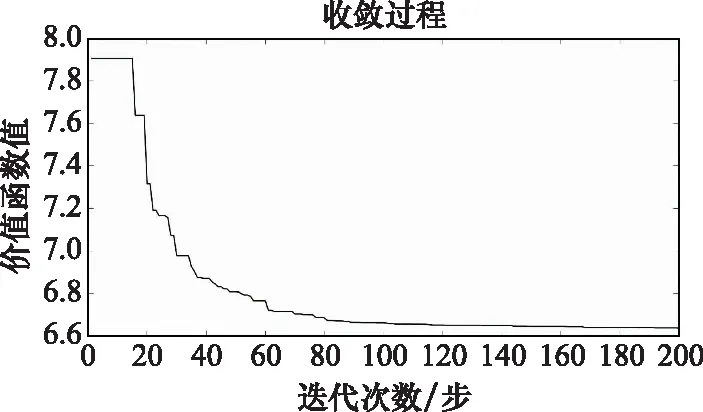
圖6 IPSO-FCM算法迭代收斂曲線(一次性使用無人機)Fig.6 Iterative convergence curve of IPSO-FCM algorithm (disposable unmanned aerial vehicle)
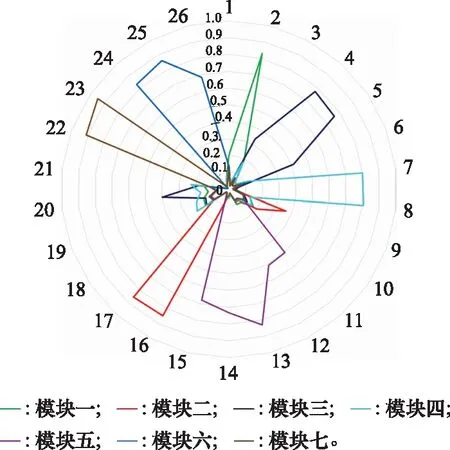
圖7 一次性使用無人機零部件最終劃分方案Fig.7 Final partition scheme of disposable unmanned aerial vehicle parts
由圖7可得,模塊精準劃分方案如下:模塊一(1#機翼、2#機身);模塊二(9#總體電機、10#電子調速器、16#槳夾、17#槳葉);模塊三(3#主控單元、4# 3軸加速度計、5# 3軸角速度計、6#氣壓高度計、20# GPS指南針模塊);模塊四(7#電池、8#電源管理板、18#數據鏈、19#機載數據鏈天線、21#導引頭);模塊五(11#平尾、12#垂尾、13#舵電機、14#可調電位器、15#齒輪傳動裝置);模塊六(24#降落傘、25#傘艙蓋、26#彈射裝置);模塊七(22#引信、23#戰斗部)。
對比最優備選方案,區別在于零部件18#、19#、21#從主控單元剝離(模塊三),劃入電源模塊(模塊四)中。其中,零部件18#、19#分別為數據鏈和天線,零部件21#為導引頭,均屬于無人機中耗電量較大的零部件,相比于主控單元模塊,將數據鏈、天線、導引頭與電源組件劃分在同一模塊更為合理。
2.2 可重復使用無人機平臺
可重復使用無人機相較于一次性使用無人機,在功能、結構、電氣、保障等相關性方面的側重點不同,要求回收后經過適當的地面保障后能夠迅速恢復執行任務能力,對保障性的要求更高。因此,可重復使用無人機模塊劃分的情況有所不同。
221 主要零部件組成
由于在航程、機動性、任務多樣性等方面的要求,可重復使用無人機在零部件組成上相較于一次性使用無人機更加復雜,可遂行偵察、監視、中繼等多樣化的作戰任務。可重復使用無人機零部件示意如圖8所示,編號對應零部件具體如表6所示。
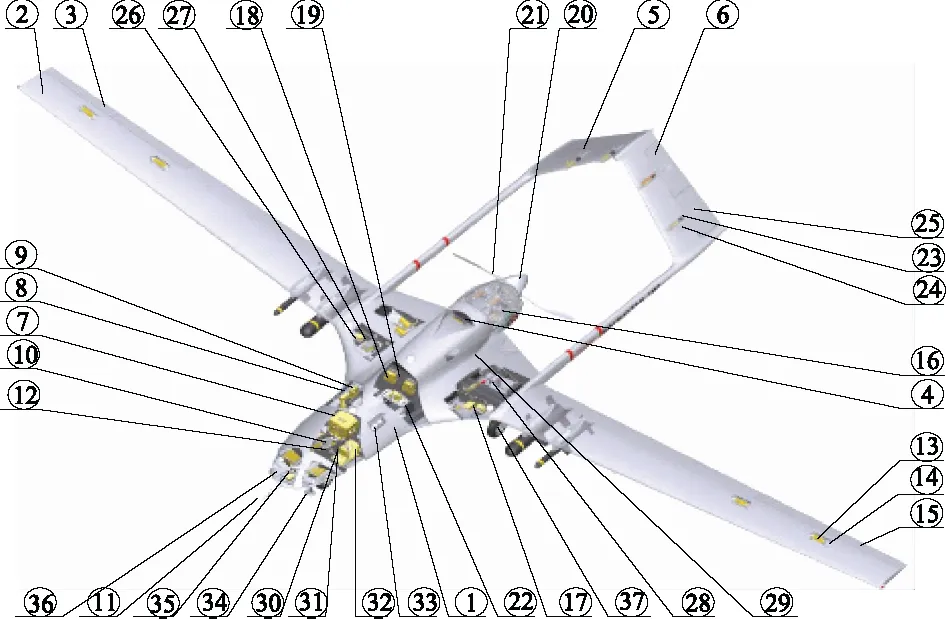
圖8 可重復使用無人機組成示意圖Fig.8 Schematic diagram of reusable unmanned aerial vehicle composition
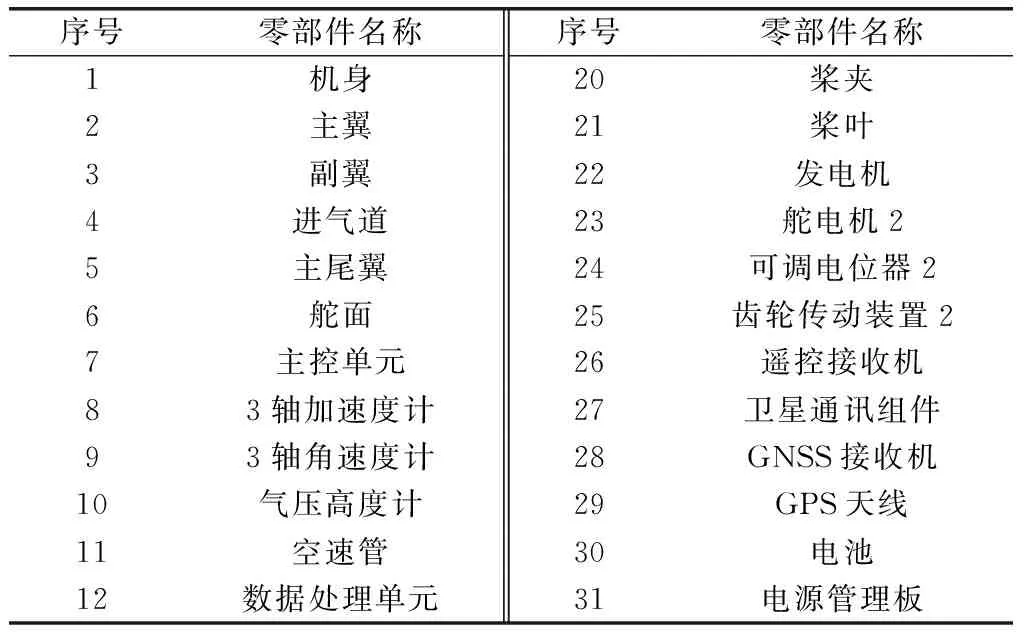
表6 可重復使用無人機主要零部件組成表

續表6
2.2.2 模塊劃分
(1) 建立綜合相關性矩陣
可重復使用無人機強調使用的循環性,因此,保障相關性的權重會有所增加,具體權重為0.19、0.23、0.17、0.41。經過加權計算,得到綜合相關性矩陣。
(2) 模塊初步劃分
參照一次性使用無人機的方法,繪制聚類樹狀圖,如圖9所示。
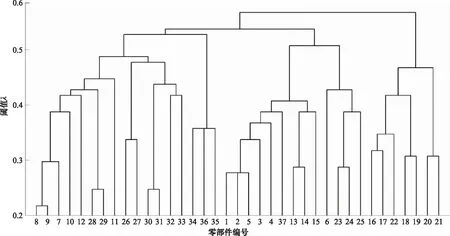
圖9 可重復無人機模塊劃分聚類樹狀圖Fig.9 Cluster tree diagram of repeatable unmanned aerial vehicle module partition
結合理想模塊數原則,確定模塊數為4、5、6、7、8作為初步劃分方案,具體方案如圖10所示。
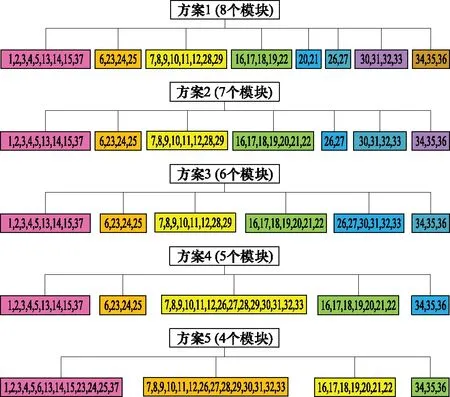
圖10 可重復使用無人機模塊初步劃分方案Fig.10 Preliminary partition scheme of reusable unmanned aerial vehicle modules
(3) 模糊綜合評價


可以看出,方案3為最優模塊劃分方案,即將無人機零部件劃分為6個模塊最為合理。
(4) 模塊精準劃分
經過迭代,在70步左右收斂到最優解,迭代收斂曲線如圖11所示,零部件最終劃分方案如圖12所示。
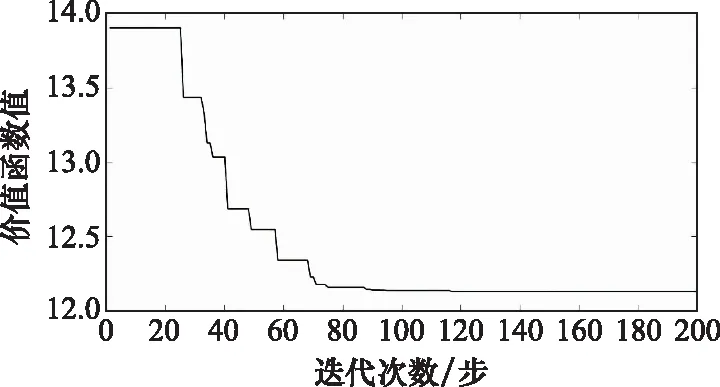
圖11 IPSO-FCM算法迭代收斂曲線(可重復使用無人機)Fig.11 Iterative convergence curve of IPSO-FCM algorithm (reusable unmanned aerial vehicle)
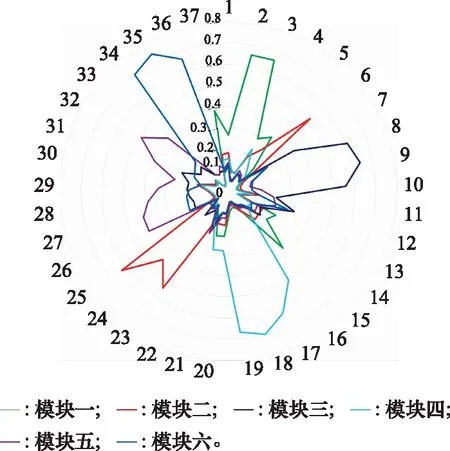
圖12 可重復無人機零部件最終劃分方案Fig.12 Final partition scheme of reproducible unmanned aerial vehicle parts
由圖12可得,模塊精準劃分方案如下:模塊一(1#機身、2#主翼、3#副翼、4#進氣道、5#主尾翼、13#舵電機1、14#可調電位器1、15#齒輪傳動裝置1、37#起落架);模塊二(6#舵面、23#舵電機2、24#可調電位器2、25#齒輪傳動裝置2);模塊三(7#主控單元、8#3軸加速度計、9#3軸角速度計、10#氣壓高度計、11#空速管、12#數據處理單元);模塊四(16#轉子發動機、17#油泵、18#主油箱、19#副油箱、20#槳夾、21#槳葉);模塊五(22#發電機、26#遙控接收機、27#衛星通訊組件、28# GNSS接收機、29# GPS天線、30#電池、31#電源管理板、32#數據鏈端機、33#數據鏈天線);模塊六(34#航拍組件、35# SAR雷達、36#激光測距儀)。
相較于最優備選方案,零部件28#、29#(GNSS接收機、GPS天線)、零部件22#(發電機)均被劃分至模塊五,將供電系統和遙測通訊設備集成在一個模塊,有利于保障此類大耗電量設備的持續供電,提高供電效率。
2.3 對比驗證及討論
對比分析一次性使用、可重復使用無人機的模塊劃分結果,可發現二者既有相通之處,又存在各自的特色,具體如下:
(1) 電子模塊差異
兩種類型無人機電子設備集成度不同,對于可重復使用無人機,強調遠距離執行任務能力,對通信、導航等電子設備功能需求更高,需要從系統中分離出來,單獨形成模塊,便于重復使用、維護及保養;而一次性使用無人機受體積限制,且功能需求較低,電子設備更傾向于集成化的配置,整體為一個模塊,便于集成化的批量低成本制造,實現可消耗性。
(2) 結構模塊差異
為適應重復飛行,將重復使用無人機的機翼、機體、起落架、舵翼等作為一個模塊,不進行拆解,以提高整個結構在重復使用中的可靠性;而一次性使用無人機強調可消耗性,結構模塊僅包含機身、機翼,垂尾、平尾為另外的模塊,以便于無人機快速大批制造、裝配,以滿足大批量消耗的需求。
(3) 模塊個數差異
可重復使用無人機強調可保障性,重復使用帶來的是保障難度的加大,較少的模塊可以適當降低保障復雜度,提高保障效率;而一次性使用無人機更強調任務單一性和能力再生的時效性,適當地細化模塊,可縮短無人機能力重組時間,發揮大規模快速定制優勢。
(4) 與現有模塊化無人機對比
通過查閱國內外模塊化無人機相關文獻,分析其模塊組成情況,并與本文中一次性使用無人機、可重復使用無人機等實例進行對比表明,本文中兩類無人機實例的模塊劃分結果與現有無人機按經驗劃分的結果相近,且模塊組成更加全面,具體情況如表7所示。
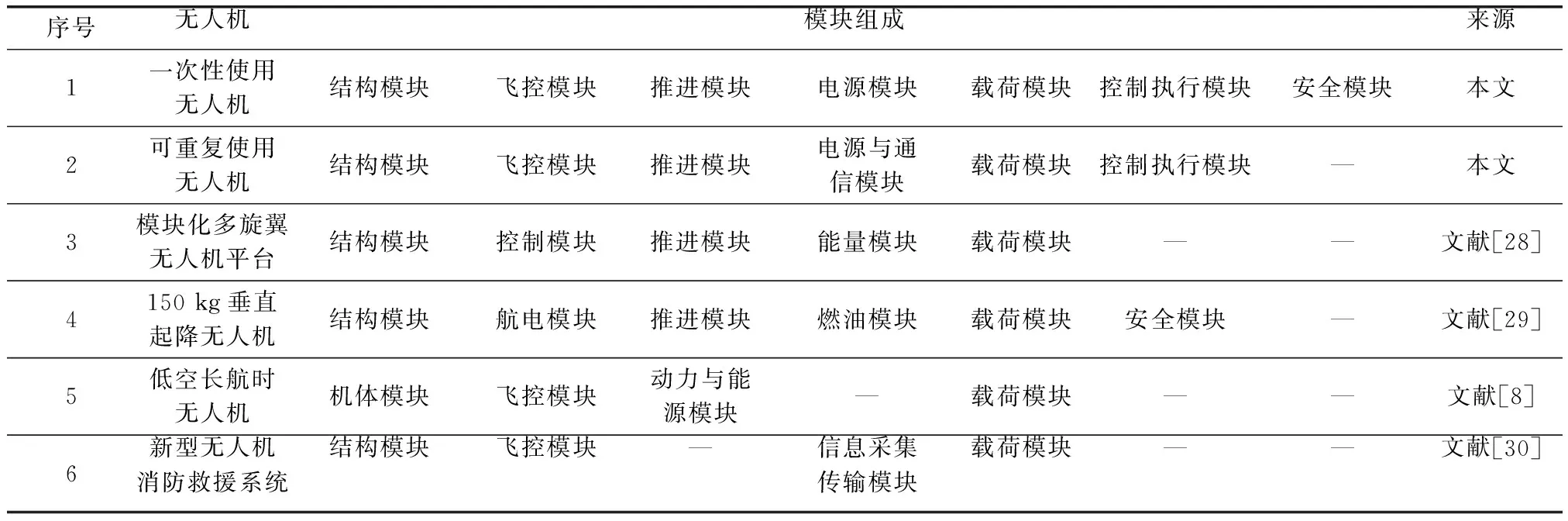
表7 國內外模塊化無人機劃分結果對比表
通過分析上述兩類無人機模塊劃分結果,并與現有模塊化無人機對比,能夠體現無人機的基本功能,且突出各自的優勢,驗證了模塊劃分方法的合理性和理論可行性。
3 結 論
本文面向無人機任務需求,結合其構成特點,構建了初步劃分-綜合評價-精準劃分的無人機模塊劃分流程,建立無人機模塊劃分評價指標網絡層次結構模型,引入專家評分機制以提升指標評定可信度,進而提出了一種適用于無人機的模塊劃分方法。以一次性使用無人機、可重復使用無人機為例,運用本文提出的模塊劃分方法,構建了綜合相關性矩陣,給出了模塊劃分備選方案,進行了基于專家評分機制的模糊綜合評價,以IPSO-FCM算法尋優獲得了最終的模塊劃分方案。通過上述兩類無人機模塊劃分結果的對比分析可知,通過引入專家評分機制,使得評價指標權重更加清晰,提升了所選最佳劃分方案的可信度。同時,所劃分的模塊能夠契合無人機的類型及特點,能夠更好地發揮無人機優勢。由此,模塊劃分結果的準確性得以驗證,也表明了所提出的無人機模塊劃分方法的合理性和理論可行性。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
石油瀝青(2021年4期)2021-10-14 08:50:44
裝備制造技術(2021年2期)2021-07-21 05:38:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
現代裝飾(2020年5期)2020-05-30 13:01:56
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26