基于最大化能效的海上中繼通信頻譜分配算法
2022-08-17 09:45:04毛忠陽康家方
系統工程與電子技術 2022年8期
孫 林, 毛忠陽,*, 康家方, 張 磊
(1. 海軍航空大學航空通信教研室, 山東 煙臺 264001;2. 海軍航空大學信號與信息處理山東省重點實驗室, 山東 煙臺 264001)
0 引 言
在相距過遠時,無人艇之間可能會由于傳播損耗而出現通信中斷,無法維持正常的通信。多跳中繼傳輸技術可以較好地解決這一問題。多跳中繼傳輸與傳統單跳傳輸相比,具有延伸覆蓋范圍廣的優點,可用于降低通信中斷的發生概率。此外,由于攜帶能量有限,無人艇還需考慮如何高效利用能量,從而延長工作時間。多跳中繼同時還具有低系統發射功率優點,正好契合節點節約能量的需求。因此,為滿足無人艇在中繼通信時,降低中斷發生概率、合理利用有限能量的目的,需對海上多跳中繼通信的頻譜分配策略開展研究。
文獻[1]提出了一種基于多跳中繼的異構超密集網絡聯合功率分配和中繼選擇算法,采用了低計算復雜度的迭代注水算法,該算法首先運行集合中的充水過程,生成水位和功率分配向量。然后提取負的分配功率給集合,并在新的集合中重復這個過程,直到不需要負的元素來提取集合。通過這個迭代過程,集合中的水位將收斂到相等的水位,并獲得最佳的功率分配。文獻[2]針對靜態信道分配問題,提出了一種啟發式算法來解決優化問題。通過為通信鏈路分配信道來解決該問題,以最小化整個網絡的干擾。針對該問題,提出了一種改進的粒子群優化算法,并采用一種新的合并方法為違反無線約束的節點重新分配信道。文獻[3]提出了以最小頻譜效率為約束條件的能量效率優化問題。對于能量效率優化問題,通過將目標函數的分子表示為凹函數的差,并利用參數變換,將非凸優化問題轉化為凸優化問題。上述文獻對商用框架下中繼網絡的頻譜和功率分配做了研究。然而,由無人艇構成的多跳中繼鏈路與上述文獻中的多跳中繼鏈路有不同之處。在無人艇鏈路組成的鏈路中,沒有大型基站或網絡骨干節點參與,甚至可能會缺少中心控制節點。并且,由于節點頻繁的運動,鏈路的不確定性大大增加。針對這種情況,研究一種分布式頻譜資源分配策略十分必要。文獻[4]研究了由無人機構成的網絡實時中繼分配和頻譜分配的策略。文獻[5]通過考慮基于雙向全雙工的放大轉發中繼的機會選擇,分析了底層認知網絡中二次用戶的性能,推導了各種性能指標的理論閉式表達式。這些都對研究分布式頻譜資源分配策略提供了參考意義。
研究分布式頻譜資源分配策略,需要對節點間通信中斷進行分析。文獻[6]對部署中繼的最佳數量及位置展開研究,以達到最小化整條鏈路中斷概率的目的。文獻[7]通過評估第個中繼的中斷概率累積分布函數,以封閉形式獲得了基于放大轉發協議多跳中繼網絡的中斷概率。文獻[8-9]提出一種基于解碼轉發協議的逐跳中繼選擇策略,在最大發射功率和最大干擾約束下,對中斷概率進行了分析。文獻[10]對分級海事無線電網絡,在確定船舶的QoS需求后,通過數據速率閾值反推得到了中斷概率函數并進行分析。上述文獻都是從整條鏈路的角度對總的中斷概率進行分析,進而確定頻譜分配策略。這是因為基于節點能夠掌握整條鏈路的路由信息。但在由無人艇構成的鏈路中,路由信息可能會由于節點運動而頻繁更改,仍然采用基于節點掌握整體鏈路的路由信息后再分析中斷概率的這種做法并不可取。這不僅會導致消耗過多的網絡資源,而且會產生決策滯后于變化的情況。因此,為應對節點運動的隨機性,節點對中斷概率的分析,需將從整條鏈路角度出發,轉換到從單個節點角度出發。此外,由于海上信道近似服從萊斯分布,因此需要重新計算在萊斯信道衰落下,端到端的中斷概率,這將有助于通信資源分配策略的改進與優化。
本文算法針對動態多跳中繼網絡,旨在研究一種能夠在降低節點間中斷概率、滿足通信需求的條件下,實現節點能效最大化的頻譜和功率分配策略。對此,本文首先對萊斯衰落信道進行分析,求出滿足端到端中斷概率的最低發射功率。之后計算出節點為滿足通信需求所需的最多子載波數。引入異步分布式定價算法,對所有子載波進行評估后,選擇出合適的子載波組合,作為下一步的優化分配的備選。在上述兩項前提的基礎上,利用滿足KKT條件的拉格朗日乘子法,確定實際所需的子載波數量,及對應子載波上的發射功率。最后在能效、中斷率等方面,對本文算法進行了仿真分析。
1 系統模型
本文對低復雜度海上動態多跳中繼網絡進行探討,圖1給出了系統模型的示意圖。
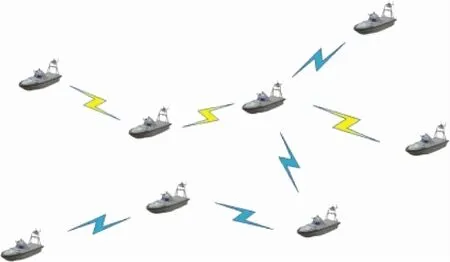
圖1 系統模型Fig.1 System model
如圖1所示,由于距離較遠,源節點與目的節點之間沒有直接相連的鏈路,因此源節點將通過多個中繼節點與目的節點通信。網絡節點采用頻分多址的工作方式。在無線電系統所使用的頻譜中,數個頻段會被選用為公共控制信道,剩余個頻段用作供節點傳輸信息的子載波。所有子載波均為萊斯衰落下的獨立信道,背景噪聲方差為。每個子載波具有相同的帶寬,且子載波帶寬遠小于相關帶寬。網絡中所有節點都具有認知能力,不同節點可對同一子載波復用,記節點選用子載波的集合為。節點采用半雙工DF協議,在不同時隙內進行信息的接收和發送。節點配備兩根天線,一根用于在發送信息時檢測沖突情況,另一根用于正常的接受和發送信號。節點每次轉發信息時,會根據通信速率要求與信道質量的感知結果重新選擇子載波組,并重新調整發射功率。當網絡中的節點在發送信息時,檢測到其他節點發來了信息,該節點將通過公共控制信道,告知向其發送信息的節點延時發送。
2 分析滿足中斷需求的功率
在海上通信時,接收端不僅會接受到一個主導的穩定信號,還會接收到信號的多徑分量,故海上信道可近似服從萊斯分布。給出萊斯分布定義為
(1)
式中:表示正弦信號加窄帶高斯隨機信號的包絡;表示主信號幅度的峰值;表示多徑信號分量的功率;()為零階第一類修正貝塞爾函數。
定義因子:
(2)
該因子是主信號功率與多徑信號功率之比,反映了主信號起到主導作用的程度。
服從萊斯分布的信號其累計分布函數表示如下:

(3)
式中:表示歸一化信號電平,定義為

(4)
式中:(,)為Marcum函數,定義如下:

(5)
由于Marcum函數目前尚未找到閉式積分結果,因此采用數值積分方法進行計算。根據華軍等人的研究成果,可以得到Marcum函數穩定計算的算式為

(6)
記表示鏈路上的路徑損耗,表示為
=10lg()+
(7)
式中:為傳播損耗指數;為節點間距離;為具有零均值的復高斯隨機變量。式(7)的計算結果以分貝為單位。

3 選取備選子載波組
節點在求得最小發射功率后,確定其所需最多子載波數,并從認知譜中選出對應數量的子載波,組成備選組。
節點在處于接受狀態時,確認下一時隙待傳輸的信息總量,進而得到下一時隙需求的最小傳輸速率-。節點在下一時隙待傳輸信息列表中,找到最遠目的節點,計算出與最遠目的節點間的信道增益后,發射功率取為相應的,可獲得的傳輸速率為

(8)
依據式(8),可求得節點需求最多的子載波數為

(9)
節點對認知頻譜進行感知,并從中選擇-max數量的子載波。對子載波的選擇可抽象為背包問題。背包問題是一種組合優化的NP完全問題,用于描述如何選擇最合適的物品放置于給定的背包中,使得背包內物品價值總和最高的問題。依據背包問題的理念,節點在選用子載波時,應使得子載波帶來的收益總和最大化。
由于認知頻譜中的子載波可多節點復用,對子載波的選取,以減少對其他節點產生的同頻干擾為目標。為滿足要求,本文引入異步分布式定價算法,對在不同子載波上可獲得的收益做出評估:

(10)
式中:表示節點受到的干擾。式(10)反映了節點在子載波上獲得的收益。在式(10)中,第1項表示節點在該子載波上可獲得的通信速率,第2項為代價,表示節點每使用一單位的發射功率,對其他節點通訊速率產生的影響。其他復用同一子載波的節點提供干擾價格函數,構成節點代價函數。由于節點探測距離有限,若所有節點互相交換干擾價格信息,將耗費大量時間資源,并產生滯后性問題。因此,在計算代價時,節點僅與探測到的節點交換干擾價格信息與備選子載波組。依據式(10),節點通過博弈選取子載波,可實現降低或規避干擾的目的。
對于組內的子載波,節點并不一定要全部使用。未使用的子載波,在分配完成后會給予釋放。
4 約束優化問題求解
在確定備選子載波組后,節點從其中選用個子載波,并相應地為之分配功率。
本文算法的目標是,在滿足中斷概率需求和通信速率需求的基礎上,實現網絡能效最大化。目標的約束優化問題表示為
s.t.
(11)
式中:第1項約束表示節點在所選用的所有子載波上,能夠達到的通訊速率總和應大于等于任務需求;第2項約束表示在任意所選用的子載波上,節點通信應滿足中斷概率需求;第3項約束條件表示節點在所選用的所有子載波上,發射功率的總和應小于最大發射功率。
借由前文中的分析,式(11)中的第2項約束可等價于
≥-th, ?∈
(12)
式(12)中各子載波上的-th并不完全相同。
針對式(11)所表示的約束優化問題,使用拉格朗日乘子法,可得到封閉形式的表達式。表達式為


(13)
為求得最優解,對式(13)依次求關于各個,以及,,的偏導數,得

(14)

(15)

(16)
(17)
式(14)中,
(18)
式(13)本應對所有功率值求偏導數,但由于這些偏導數表達式形式一樣,僅針對的子載波不同,故由式(14)表示。

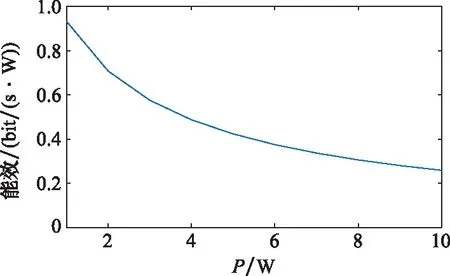
圖2 能效函數Fig.2 Energy efficiency function
由圖2可知,降低功率可帶來能效的增加。對能效函數進行分析后發現,能效函數對功率的一階導數小于零,二階導數大于零,這使得節點降低一單位功率增加的能效量,要大于增加一單位功率減少的能效量。故節點均勻分配功率并不能最大化能效。此外,由于載波的萊斯衰落分布是獨立的,若盲目采用均勻分配的策略,可能在部分子載波上無法滿足中斷概率的需求。因此,令式(17)等于零求解時,節點采用均分策略不一定是合適的。
在-max中任取兩個子載波與,對于子載波和,令式(14)等于零,聯立方程,可計算得
(19)
式(19)中的與,可在對第個和第個子載波分配功率求解時得出,分配功率求解過程如下。將式(19)代入式(14),記+=,為一常數。令式(14)等于零,經化簡得

(20)
依據盛金公式法,計算得
(21)
(22)
(23)
判別式如下:
Δ=-4>0
(24)
依據盛金公式法的原理,當Δ>0時,式(20)將存在一個實根和一對共軛虛根。該實根可表示為

(25)
式中:
(26)
(27)


(28)
將式(26)與式(27)代入式(28),并引入不等式

(29)
式(28)轉化為
(30)
經過進一步計算可化簡為
>932
(31)
將式(21)與式(22)代入式(31),可得
(32)

(33)
式中:[]=max{,0};為迭代次數。令
=+Δ
(34)
依據式(34),對各個子載波上的發射功率取值。依次對不同子載波進行迭代運算,計算在其他子載波上功率為的情況下,各個子載波上可實現能效最大化的功率。在>10后,停止迭代運算。
按照上述的計算方式,在-max中的所有子載波上,節點計算出在各個子載波上的最優發射功率后,可能會出現節點的功率消耗總合大于的情況。若出現該情況,節點需從-max中進行挑選,從中選出個。被挑選子載波上的功耗總和應小于最大發射功率,并且要使得數量最大化。對于未被選用的子載波將予以釋放,并通過控制信道,向最大探測范圍內的其他節點傳遞告知信息。至此,完成頻譜資源的分配,然后開始傳輸信息。
5 仿真分析
現考慮一個包含20個節點的多跳中繼網絡,節點于100 km×100 km范圍內隨機運動。節點最大時速為25節,節點速度及運動方向會發生變化。對于系統認知頻譜,除去公共控制信道,設定剩余16個可供通信的子載波,每個子載波的帶寬為25 kHz。所有子載波具有相同的背景噪聲,功率為100 mW。節點的最大發射功率為30 W。節點最大探測距離為20 km。設定在接收端處,當信干噪比小于1時,節點間通信中斷。節點間通信的中斷概率上限閾值為1%。因子取值為10。節點間距離以km為單位,路徑損耗指數取值為1.6。假設節點將全部功率用于發射信號,故系統損耗不予考慮。網絡內信息的產生服從泊松分布。
圖3給出了兩種算法系統吞吐量的對比圖。圖3中畫出了兩種算法能夠達到的吞吐量以及基本需求。基本需求表示在每個時隙內,網絡中所有節點需要傳輸的數據總量。由于信息的產生具有隨機性,故在不同時隙網絡能夠達到的吞吐量起伏變化較大。從圖3中可以看出,本文算法在吞吐量方面相較于對照算法有提升,但是提升程度不大。通過分析對照算法吞吐量小于本文算法的原因,發現是因為在對照算法中,若節點在某個時隙內需要傳輸消息過多,會導致在某些子載波上分配到的發射功率較小,進而會導致鏈路中斷,損失掉在這些子載波上的數據傳輸量。在仿真過程中,部分節點確實會面臨多路信息匯集的情況。因此,圖3也從側面印證了節點在面對有大量數據包需要傳輸時,本文算法相較于對照算法是有優勢的。
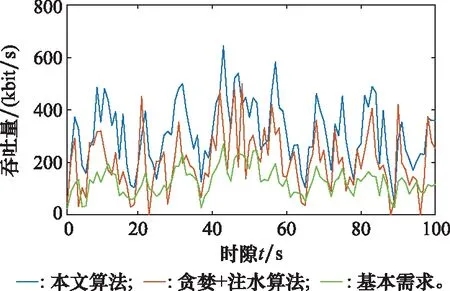
圖3 系統吞吐量對比Fig.3 Comparison of systems’ throughput
圖4給出了在每時隙內兩種算法系統能耗對比圖。圖5給出了在每時隙內兩種算法系統能效對比圖。在仿真過程中,節點采用本文算法選用子載波的數量會小于等于對照算法下的需求量。正是因為子載波數量較多,采用注水算法不可避免地要使用更多的功率。故本文確實可以減少發射功率的消耗。因此,采用本文算法節點可減少能量消耗,提高能效。
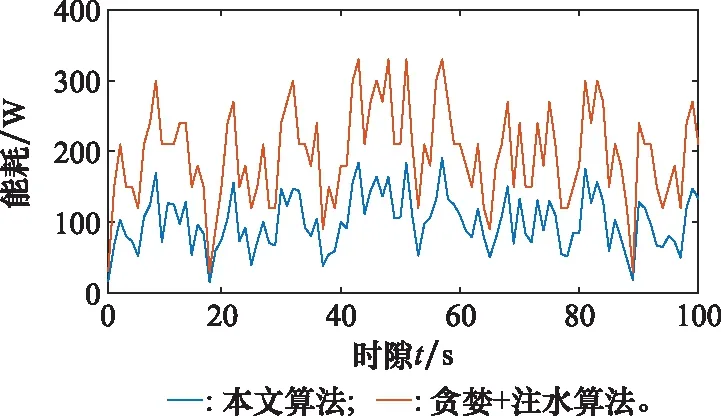
圖4 系統能耗對比Fig.4 Comparison of systems’ energy consumption
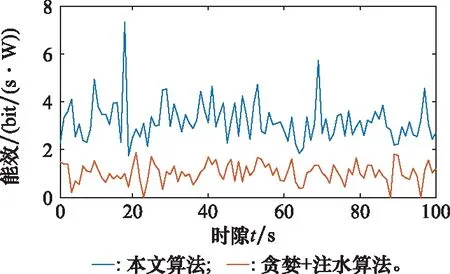
圖5 系統能效對比圖Fig.5 Comparison of systems’ energy efficiency
圖6給出了在所有時隙內,兩種算法中節點平均能耗對比圖。圖7給出了在所有時隙內,兩種算法中節點平均能效對比圖。由于節點運動具有隨機性,故不同節點在區域內的位置會有較大差異,從而導致不同節點作為中繼的次數不盡相同。圖6與圖7也印證了本文算法在提高能效方面具有優勢。
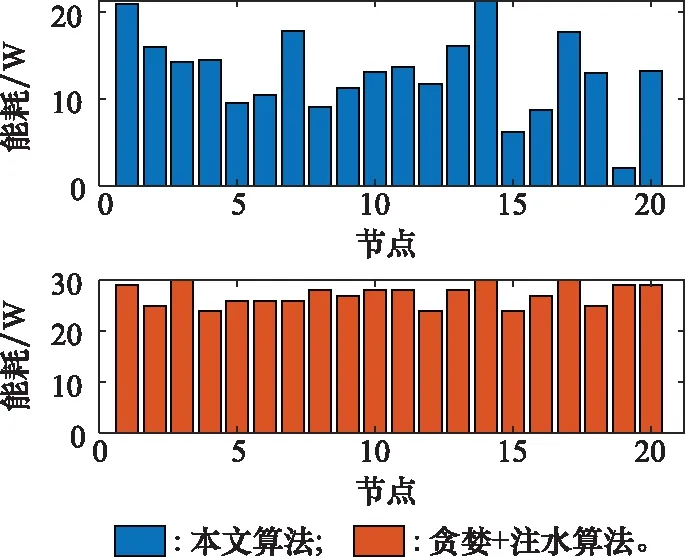
圖6 節點平均能耗對比Fig.6 Comparison of nodes’ average energy consumption

圖7 節點平均能效對比Fig.7 Comparison of nodes’ average energy efficiency
圖8給出了在每個時隙內,兩種算法網絡發生中斷的次數對比。圖9給出了在兩種算法中,所有節點在全時隙內的平均中斷概率。仿真結果顯示,節點間的平均中斷概率達到了4%,超過了前文中計算時設定的中斷概率閾值1%。通過分析發現,節點在選取子載波時,由于不會與超出界限的節點交換發射功率和干擾價格信息,此時,若某一在發射節點界限以外,接受節點界限以內的節點,使用了與發射節點相同的子載波,則會在接收端處產生較大的干擾,有可能會導致中斷。而對照算法產生較大中斷率的原因在前文已分析過,不再贅述。
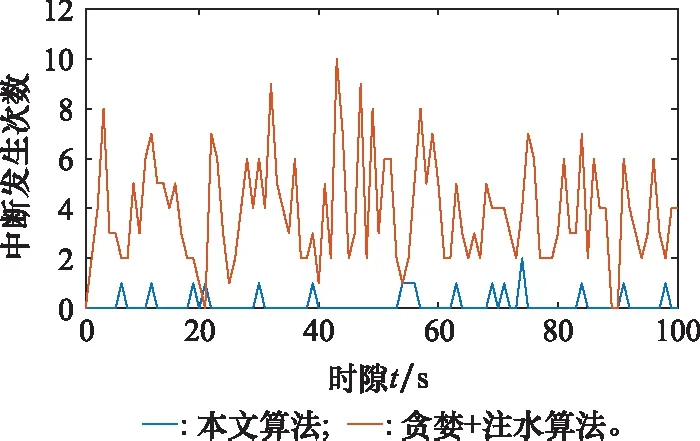
圖8 系統中斷次數對比Fig.8 Comparison of the number of outage
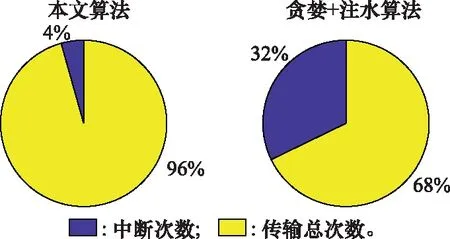
圖9 節點平均中斷率對比Fig.9 Comparison of nodes’ average outage rate
對任意節點而言,記其探測范圍內其他節點數量為,本文算法與對照算法的乘法運算復雜度如表1所示。可見,本文算法是以犧牲算法復雜度為代價獲得了效能上的提升。

表1 算法復雜度
通過仿真分析可以看出,即使是在節點平均中斷率較高的前提下,對照算法在吞吐量性能上的表現依然不是很差,可見對照算法在提升系統整體吞吐量方面依然是有可取之處的。但是其在保證網絡鏈路的穩定性方面有所欠缺,且能量效率比較低。由此可見,在面對不穩定的海上通信時,為保證較高的能量效率,本文算法是有效的。
6 結 論
本文針對海上無人艇構成的多跳中繼網絡的場景,圍繞如何分配通信資源可使能效最大化展開研究。基于對萊斯衰落信道的分析,對滿足中斷概率需求的最低發射功率進行求解。進而確定節點所需最多子載波數量,并引入異步分布式定價算法,從頻譜中選取備選組。最后,利用滿足KKT條件的拉格朗日乘子法對頻譜和功率資源分配的次優解進行了求解。仿真結果表明,本文算法在保證通信需求的同時,可以大大降低中斷發生的概率,且能夠有效提升系統整體的能效。