跟馳場景中網聯混合電動貨車速度規劃和能量管理協同控制的研究*
2022-09-05 15:46:36解少博屈鵬程李嘉誠王惠慶
汽車工程 2022年8期
解少博,屈鵬程,李嘉誠,王惠慶,郎 昆
(長安大學汽車學院,西安 710064)
前言
貨車具有較大的迎風面積,在行駛中空氣阻力消耗的能量占總能耗的比重十分顯著,而編隊行駛可以通過對車速進行精準控制來調節車間距,改善前車和跟馳車輛的空氣流場形態,達到降低空氣阻力的目的。編隊行駛已被證實是提升經濟性的有效手段之一。對配置有發動機和電池的混合動力貨車(HET),為了進一步提升經濟性,除了通過編隊行駛降低能耗,還可以優化能量源之間的功率分配關系達到節能目的,即優化能量管理策略。與此同時,由于電池成本在HET 總成本中占有很大比重,能量管理策略所決策的電池輸出功率除了影響整車的能耗經濟性,還影響到電池老化速率及對應的老化成本。顯然,更多地使用電池的電能盡管可以提升能耗經濟性,但會增大電池的老化成本。因此,從整體經濟性來考慮,須協同考慮電池的老化成本和功率分配來優化能量管理策略。
另一方面,HET 在隊列中的跟馳速度影響到與前車的車間距,從而影響到行駛的安全性和空氣阻力,同時跟馳速度還決定了功率需求,而HET 的能量分配關系又決定了電池的輸出功率,從而影響到整車的能耗成本和電池老化成本。由此可見,處于跟馳場景中的HET,速度規劃和能量管理兩個決策行為是互相關聯的,且影響到跟馳安全性、能耗經濟性、電池老化和空氣動力效應等多個性能。
針對燃油汽車編隊行駛的節能策略已展開了相關研究,針對新能源汽車的編隊控制也已引起關注。文獻[5]中針對紅綠燈場景下兼顧車間協同控制和燃油經濟性,提出分層模型預測控制策略,上層從優化速度和舒適性等角度獲取最優經濟車速,下層實施能量管理策略優化動力源輸出,實現了車隊通過紅綠燈的協同控制。文獻[6]中針對混合動力貨車的空氣阻力、速度規劃和能量管理問題,提出集成協同優化策略,進一步降低了能耗。
電池作為電動汽車的重要零部件,合理地使用電池對于提升整車經濟性意義重大。為了提升安全性和經濟性等性能,需要從全局視角理清貨車在跟馳過程中電池老化與其他目標之間的耦合關系。現有研究針對跟馳過程中空氣阻力的優化以及混合動力車輛的能量分配均有涉及,而針對新能源汽車在跟馳過程中協同考慮跟馳安全性、空氣阻力、能耗成本以及電池老化等多重目標的速度規劃和能量管理協同控制問題尚未給予重視。
基于上述考慮,本文中針對網聯HET 在跟馳過程中的速度規劃和能量管理協同控制問題,提出一種綜合考慮安全性、能耗經濟性、空氣阻力和電池老化等多重目標的協同模型預測控制(CMPC)策略。它基于模型預測控制的架構,在滾動時域內利用動態規劃進行多重目標的優化,開發實時性協同控制策略。
1 車輛系統模型
1.1 動力系統結構
本文中假設跟馳場景中的HET 的動力系統結構如圖1 所示。柴油發動機和發電機(ISG 電機)機械連接組成EGU 單元,EGU 單元和動力電池電力耦合,提供車輛行駛的功率需求和能量回收。表1 為整車主要參數。
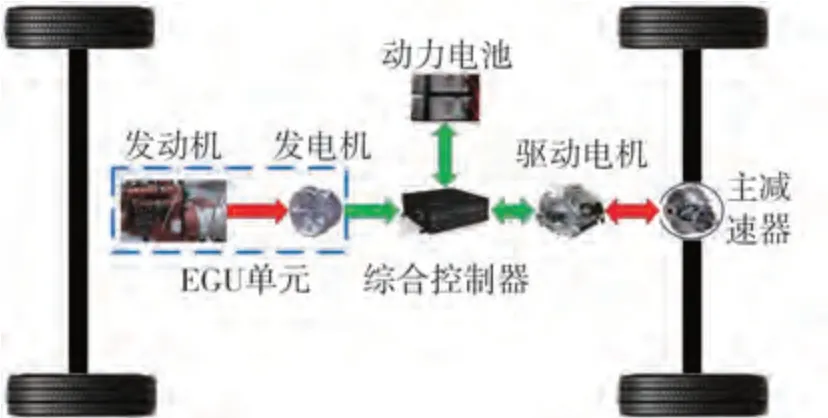
圖1 HET動力系統結構

表1 整車主要參數
1.2 動力系統模型
1.2.1 動力部件模型
對于發動機和電機,基于穩態試驗數據可以將其能耗效率表示為轉速和轉矩的函數,它們的能耗效率MAP圖如圖2~圖4所示。
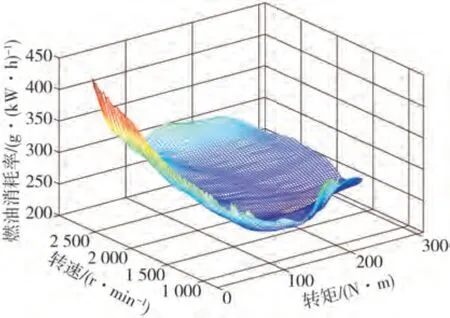
圖2 發動機燃油消耗特性圖
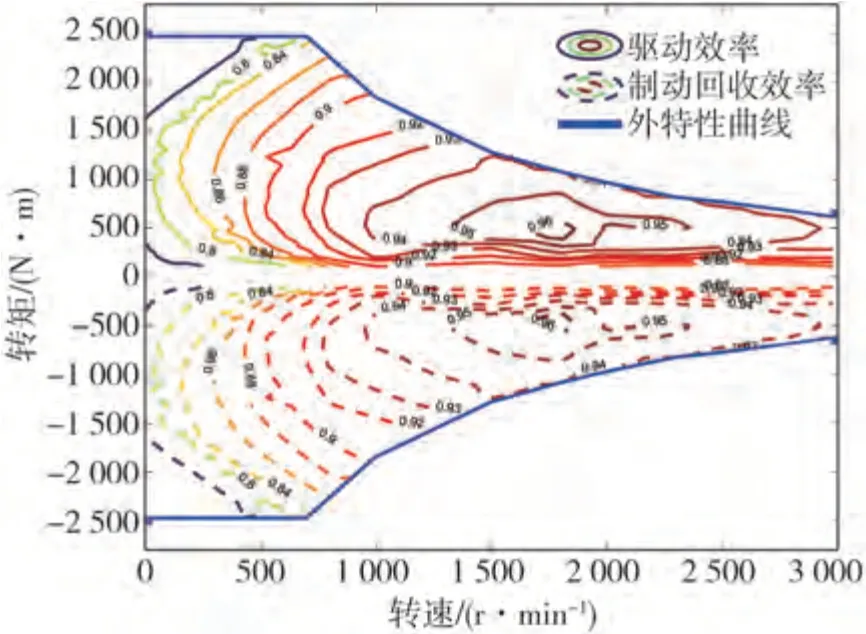
圖4 驅動電機效率MAP圖
1.2.2 電池模型
動力電池類型為磷酸鐵鋰電池,電池組由156個單體串聯而成,每個單體容量為60 A·h,電壓為3.2 V,電池組的總電壓為499.2 V。
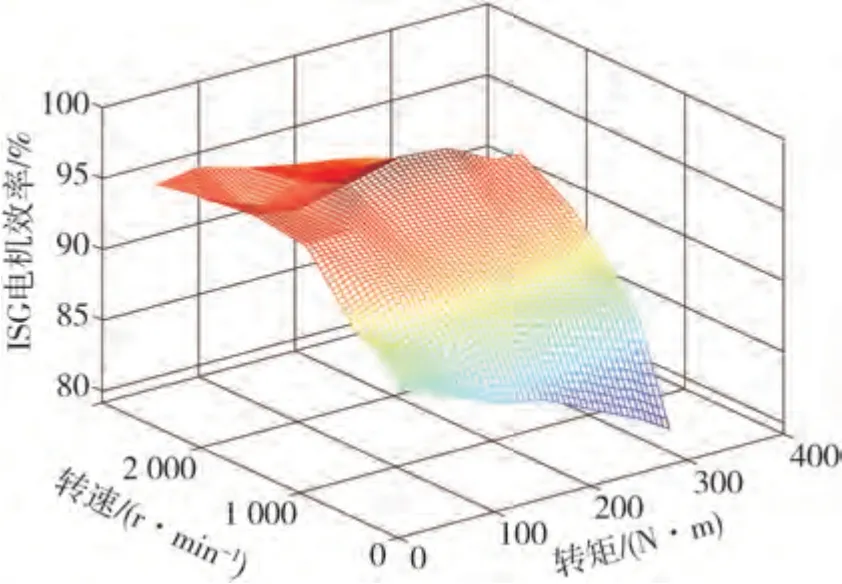
圖3 ISG電機效率MAP圖
1.3 車輛跟馳動力學模型
1.3.1 跟馳模型
為了保證車輛在跟馳時的安全性,避免追尾事故,定義最小車間距為

式中:為最小跟馳車間距;c為常量,表示停車時必要的車間距,取值1 m;為制動器響應時間,取值為0.5 s;為車輛在跟馳行駛時后車的速度。
同時,過大的車間距會影響道路通行效率,而且會引起其他車輛的插入,影響車隊的跟馳安全性和隊列的完整性,還會極大降低減阻效應。因此定義最大車間距為

式中:為最大跟馳車間距;為常量,取值為1.5 m;為標定系數,取值為0.8;Δ為離散時間步長,取值為1 s。
期望車間距是為跟馳車輛的速度規劃提供參考,使車輛的安全性得到保障并降低空氣阻力。基于車頭時距的期望車間距模型可表達為

式中:為停車后的期望車間距;()表示車頭時距,是的函數,當()為常數時該公式表示恒定車頭時距模型,否則為可變車頭時距模型;和均為取值是正數的標定系數,單位分別為s/m和s。
1.3.2 減阻效應模型
本文中應用XFlow軟件對車輛在跟馳過程中空氣阻力系數的變化進行仿真研究。在XFlow軟件中設置計算域的長、寬、高分別為80、16和30 m,湍流和汽車表面的解析度為0.012 5 m,氣流設定以恒定值25 m/s由入口垂直進入,同時設置不同的車間距并記錄空氣阻力系數。圖5為最終擬合得到的跟馳車輛空氣阻力系數與非跟馳時的空氣阻力比值隨車間距的變化曲線。
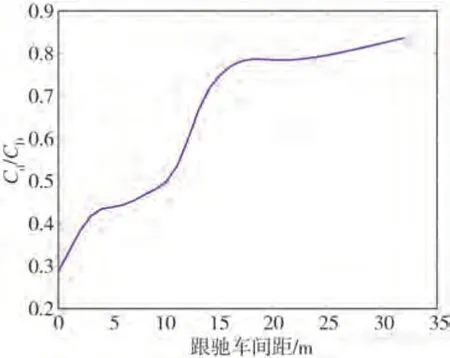
圖5 空氣阻力系數比值隨車間距的變化軌跡
1.4 電池老化模型
本文的電池容量衰減模型可描述為
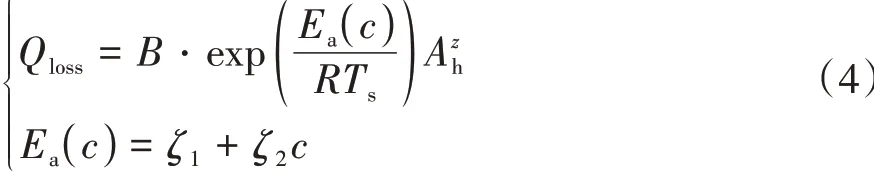
式中:為電池容量損失百分比;為指數前因子;為活化能;為充放電倍率;為氣體常數;為電池溫度;為指數因子;為安時吞吐量,即電池充放電電流絕對值對時間的積分;和為標定系數。
考慮=20%時電池壽命終止。在計算過程中,忽略各單體電池間的差異,電池瞬時老化成本計算公式為

式中:為電池瞬時老化成本;為車輛當前行駛時刻;為單位電量電池組購置成本;為電池組總電量;為電池組總容量;為電池單體瞬時容量衰減程度;為電池工作環境溫度;為電池電流;為電池容量衰減因子,定義為標準工況與實際工況下電池總安時吞吐量的比值;為電池組串聯單體數;為標準試驗工況下,電池壽命終止前的總安時吞吐量;為單體中并聯的電芯數。
2 跟馳場景HET多目標協同控制問題
為了實現實時性控制,基于模型預測控制的思想在滾動時域內構建目標函數。基于模型預測控制提出考慮空氣動力效應的協同控制策略,后文簡稱CMPC 策略,其原理如圖6 所示。另外,本文中假設后車可以通過V2V 通信實時獲取前車的車速信息和車間距信息。
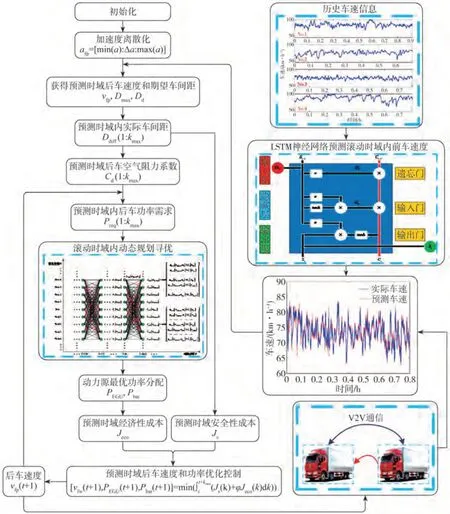
圖6 CMPC策略執行流程圖
2.1 目標函數構建
在構建目標函數時,首先量化安全性成本、能耗成本和電池老化成本。
2.1.1 安全性成本
貨車在跟馳過程中,首先要保證與前車的安全性,即貨車之間不能發生碰撞或存在發生碰撞的隱患,而且后車要能隨時捕捉到前車的位置信息,保證車隊的完整性;在此基礎上考慮經濟性優化問題的求解。因此前車和跟馳車輛的車間距必須大于最小車間距,并盡可能接近期望車間距。為了量化安全性,根據建立的縱向動力學模型,定義安全性成本為
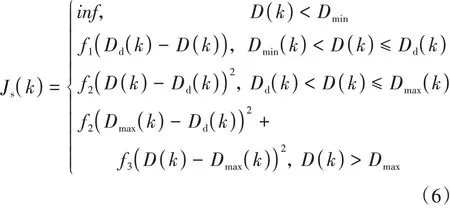
式中:為行駛安全性成本;、和為權重常量,其取值分別為2 元/m、5 元/m和40 元/m;為預測時域內的時刻;為實際車間距。
2.1.2 經濟性成本
本文的HET 具有EGU 和動力電池兩個動力源,并且考慮到電池老化成本,定義經濟性成本為電耗成本、電池老化成本和油耗成本之和:

式中:為經濟性成本;和分別為柴油單價和電價,取值分別為6.5元/L和1.0元/(kW·h);˙為發動機燃油消耗率;為電池功率消耗。
2.1.3 目標函數
考慮到安全性成本和經濟性成本量綱及數量等級的不同,以滾動時域內的經濟性成本和等效安全性成本的加權和最小化構建目標函數:

式中:為綜合評價指標;為車輛當前行駛時刻;為預測時域長度;為經濟性成本的權重因子,根據仿真測試取為無量綱常數1 400。
2.2 目標函數的求解-MPC
針對滾動時域內的優化問題,采用DP 進行求解。其中,選擇貨車加速度和EGU 輸出功率作為控制變量,動力電池SOC和車速為狀態變量,對控制變量優化求解。同時,假設在預測時域內后車具有恒定的加速度。
2.3 滾動時域的模型預測
在計算后車安全性成本時,須在滾動時域內對前、后車的車速進行預測。對于前車,采用長短時記憶神經網絡(LSTM)進行滾動時域內的車速預測;后車則采用CMPC策略預測車速。
圖7為實車采集得到的前車歷史車速譜,工況No.1、No.2、No.3 和No.4 用于對LSTM 神經網絡訓練,將No. 5 用于仿真驗證。表2 列出了LSTM 網絡在不同預測時域長度時的預測精度。
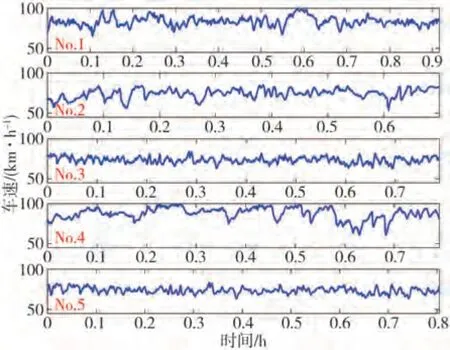
圖7 歷史車速譜
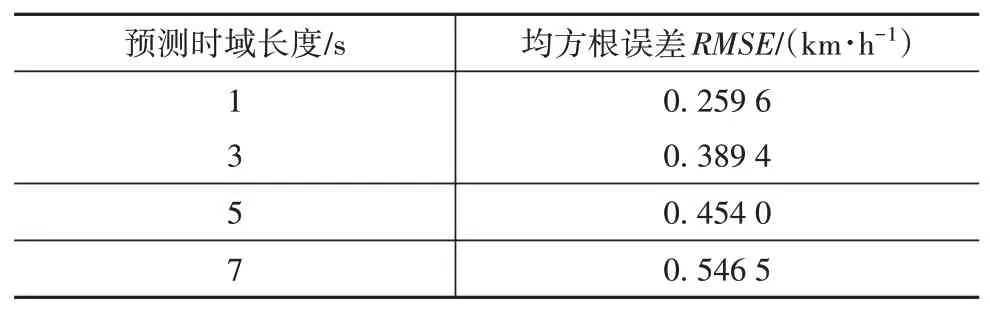
表2 不同時域長度的預測精度
從表中可以看出,預測精度隨著預測時域長度的增加逐漸降低,但預測時域越短,經濟性優化效果會越差,故綜合考慮優化效果、預測精度和時間效率,選擇3 s作為預測時域長度。
3 人工跟馳模型
為了對提出的CMPC 策略進行評估,基于一種反映人工駕駛的速度跟馳模型—全速差耦合模型(full velocity difference coupled model,FVDCM)進行比較。對于HET 的能量分配,分別選擇基于規則的電量維持策略(CS)和基于全局優化的龐特里亞金最小值原理(PMP)進行仿真分析和結果對比。
3.1 FVDCM模型
在FVDCM 模型中,前車的狀態變化過程可以表示為

式中:和分別為前車的車速和加速度;為前車的行駛距離信息;Δ為采樣時間。
后車的狀態變化可以描述為

式中:表示駕駛員的反應靈敏度;Δ為前車與后車的速度差;表示駕駛員對Δ的敏感度;為采樣間隔,取值為1 s;表示跟馳車輛的最優車速函數,其具體定義可見文獻[11]。
3.2 FVDCM+CS
基于規則的能量管理策略可通過設置合理的規則,使車輛驅動模式規律性切換以滿足車輛行駛功率需求的同時降低能耗。CS 策略的SOC 下限設置為0.55,上限設置為0.65,EGU功率取恒定值70 kW。
3.3 FVDCM+PMP
與動態規劃策略相比,PMP 在設計能量管理策略時具有與動態規劃相近的優化結果,但其計算效率更高。為此,進一步采用PMP 將能耗最優問題轉化為含約束的非線性優化問題,并通過打靶法獲得EGU和動力電池的最優功率分配序列。
4 結果與分析
本文中以No.5速度譜(見圖7)來模擬跟馳過程中前車的車速,并假設HET(后車)在整個行程中一直處于跟馳狀態,不考慮后車和前車的分割以及外來車輛在兩車間的插入等情況。
以No.5速度譜為例(里程為58.8 km)進行仿真行駛,電池SOC 初始狀態為0.60。電池壽命衰減模型的相關參數:氣體常數為8.314 J·mol·K,環境溫度為298.15 K,指數前因子為31 630,指數因子為0.55,系數和分別為-31 700和370.3,電池購置成本設為1 500元/(kW·h)。
4.1 目標函數考慮電池老化與否的比較
為分析電池老化這一因素對經濟性成本的影響,對比在目標函數中考慮電池老化成本與否時的結果。因此,期望車間距設定為固定值18 m。結果如表3 所示,其中,CMPC-bc-w/o 表示目標函數中不考慮電池老化的策略,CMPC-bc-w 表示目標函數中考慮電池老化的策略,經濟性成本為電池老化成本與能耗成本之和。

表3 目標函數中考慮電池老化成本與否的結果對比
由結果可知,與目標函數中不考慮電池老化相比,考慮電池老化的經濟性成本在整個行程降低了1.90%。其原因是由于CMPC-bc-w 策略抑制了電池的大電流放電過程,因此在總需求功率不變時,油耗量和電耗量變化不顯著,但可以抑制電池大電流放電有助于降低電池老化速率,減少老化成本,從而使CMPC-bc-w的經濟性成本下降。
圖8為兩種策略下動力電池的充放電倍率變化曲線。可以看到,CMPC-bc-w 的充放電倍率明顯低于CMPC-bc-w/o。
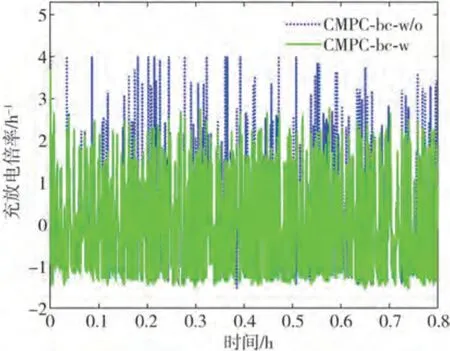
圖8 充放電倍率對比
圖9是兩種策略的動力電池SOC對比,可以看出,與CMPC-bc-w/o 策略相比,CMPC-bc-w 策略的SOC軌跡波動范圍較小。圖10是速度對比圖,圖11是車間距對比圖。可以看出,CMPC-bc-w策略的跟馳車間距變化范圍更窄,車輛在跟馳行駛過程中貨車之間的車間距更穩定。因此,CMPC-bc-w策略是對CMPC-bcw/o策略的進一步優化,從經濟性和跟馳安全性兩個方面來看,CMPC-bc-w策略均具有更優的控制效果。
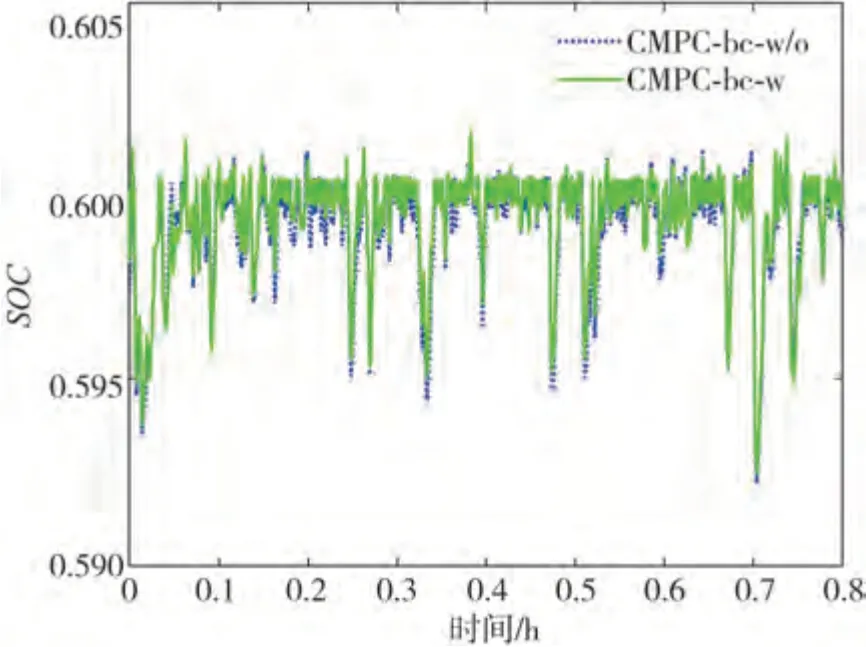
圖9 SOC軌跡
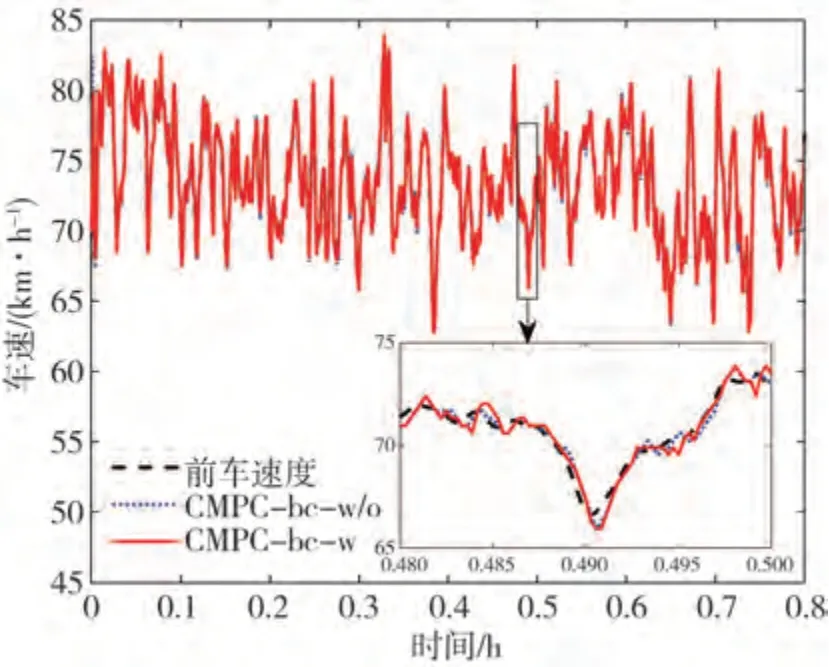
圖10 實際車速變化曲線
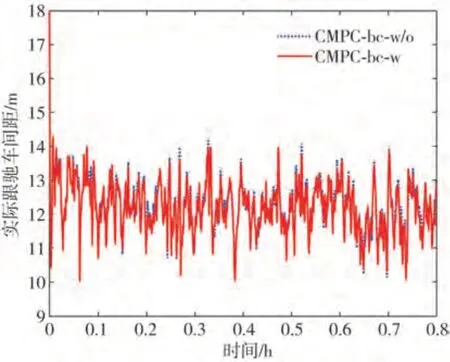
圖11 實際車間距變化曲線
4.2 考慮空氣動力效應和電池老化與否的結果對比
為分析空氣動力效應和電池壽命衰減兩個因素耦合時的效果,對比目標函數中同時考慮這兩種因素與不考慮這兩種因素的結果。在這兩種情況下,當目標函數中不考慮空氣動力效應時,空氣阻力取為恒定值,而當考慮空氣動力效應時,期望車間距和空氣阻力隨車速變化。結果如表4 所示,其中,CMPC-w/o 表示目標函數不考慮空氣動力效應和電池老化成本的策略,CMPC-w 表示目標函數同時考慮空氣動力效應和電池老化成本的策略。

表4 目標函數中考慮空氣動力效應和電池老化成本與否的結果對比
可以看出,CMPC-w 相比CMPC-w/o在整個里程的經濟性成本降低15.11%。主要原因是抑制電池老化速度與動態調整車間距這兩者的耦合作用,使能耗經濟性明顯提升。
兩種策略的動力電池SOC 曲線如圖12 所示,實際跟馳車間距如圖13所示。
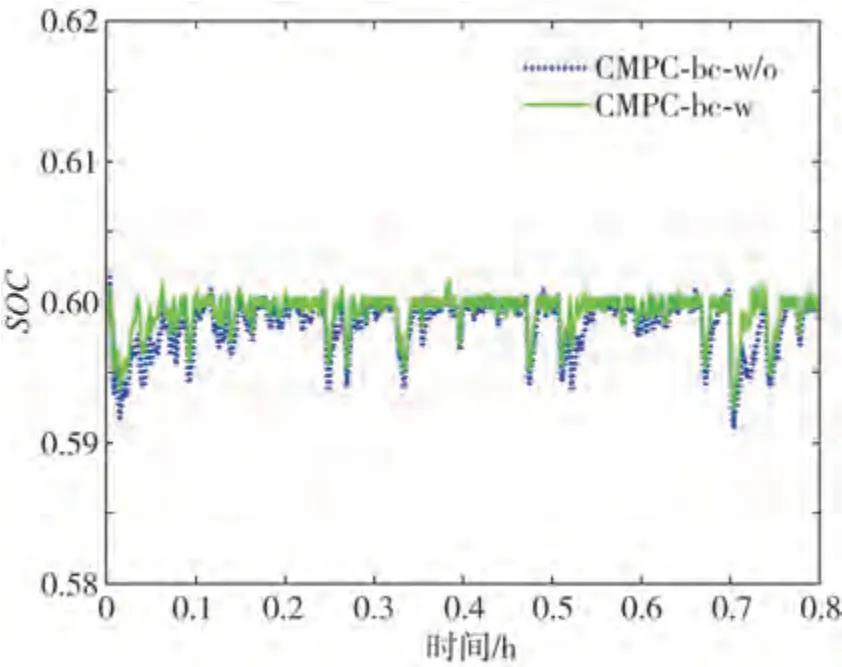
圖12 SOC軌跡
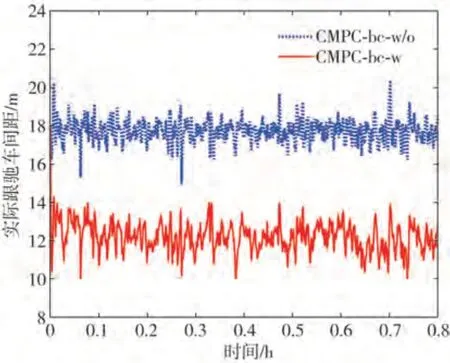
圖13 實際車間距變化曲線
從圖中可以看出:與CMPC-w/o 策略相比,CMPC-w 策略的SOC 軌跡波動范圍較小,電池充放電深度較淺,從而有效抑制了電池老化速率,降低了電池老化成本;另一方面,由于CMPC-w 策略的跟馳車間距更小,氣動效應降低了車輛的總功率需求,致使驅動車輛的需求功率峰值有所削減。綜上所述,目標函數中考慮空氣動力效應和電池老化時,能夠有效提高HET 的使用經濟性。由結果還可以看出,相比考慮電池老化對HET 經濟性的改善,考慮空氣動力學效應對其經濟性的提升效果更為顯著。
4.3 CMPC協同控制策略性能評估
速度規劃的目的是面向自動駕駛。為進一步對比協同控制策略與人工駕駛在不同跟車距離時經濟性成本的差異,本節基于改進的全速差模型(FVDCM)并結合能量管理策略(包括基于規則的CS策略和基于全局優化的PMP 策略)與CMPC 協同控制策略進行對比分析。結果如表5 所示,其中,FVDCM+CS和FVDCM+PMP 分別表示基于改進的全速差駕駛模型與電池電量維持策略和基于改進的全速差模型與龐特里亞金最小值原理的全局策略。

表5 目標函數中考慮電池老化和空氣動力效應與另外兩種策略的結果對比
由表可知,CMPC 的經濟性成本僅比FVDCMPMP 的經濟性成本高1.07%,能耗成本高1.54%,但FVDCM-PMP 屬于全局最優算法,不具備實時性。而與FVDCM+CS 相比,CMPC 的經濟性成本則降低了14.37%,能耗成本降低了13.53%。由此可見協同控制策略在實時性和經濟性方面的優勢。
圖14和圖15 分別為FVDCM 和CMPC 兩種跟馳模型的車間距和空阻系數的對比。可以看出,盡管FVDCM 和CMPC 的初始車間距都設為18 m,但前者的車間距基本維持在17~19 m 之間,波動范圍較小。而CMPC為了提升經濟性而柔性地調整車間距使其在10~14 m之間波動,即為了降低空氣阻力并提升經濟性而追求更激進的跟馳距離。由圖15還可以看到,相比FVDCM策略,CMPC策略的后車空氣阻力系數明顯降低,因而能有效利用減阻效應實現節能行駛。
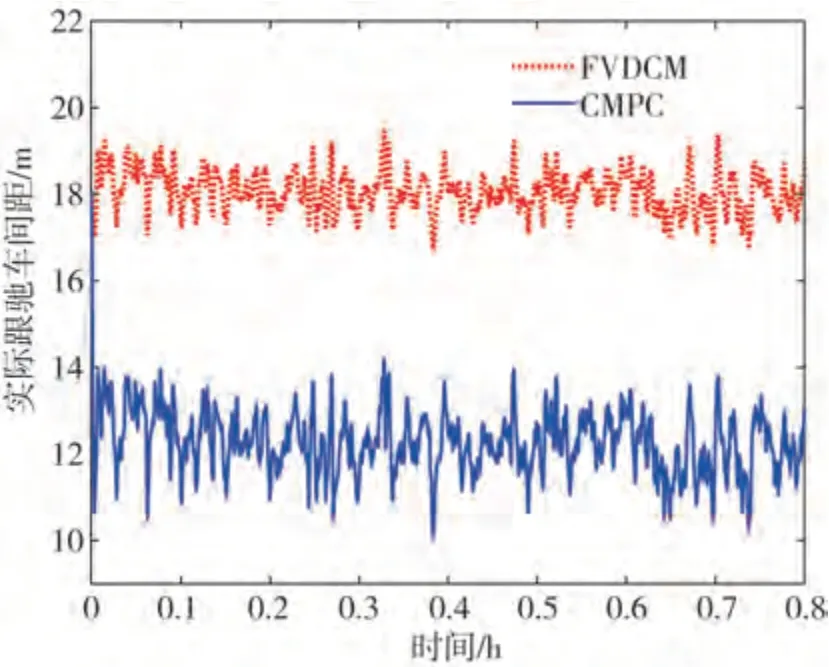
圖14 不同策略車間距對比

圖15 空氣阻力系數對比
5 結論
本文中針對網聯混合動力貨車在跟馳場景中的速度規劃和能量管理的協同控制展開研究,特別考慮了在跟馳行駛時的空氣動力學效應和電池壽命衰減帶來的影響,提出考慮跟馳行駛安全性、能耗經濟性、空氣動力學效應和電池老化的協同控制策略(CMPC)。與在目標函數中不考慮電池老化的策略對比,考慮電池壽命老化成本的協同控制策略降低了動力電池在高放電倍率下工作的頻次,從而有效地降低了電池老化成本,在整個行程上的經濟性成本降低了1.90%。與在目標函數中不考慮電池老化和空氣動力效應的策略對比,考慮這兩者的協同控制策略不但降低了動力電池在高放電倍率下工作的次數從而降低了電池老化成本,還有效利用空氣動力學效應對貨車跟馳距離進行優化,其經濟性成本降低了15.11%。另外,與基于人工駕駛行為的跟馳模型進行對比,協同控制策略在實時性和優化效果方面具有更均衡的優勢。
猜你喜歡
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
河南電力(2021年5期)2021-05-29 02:10:00
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
電影(2018年12期)2018-12-23 02:18:48
數學大世界(2018年1期)2018-04-12 05:39:14
四川電力技術(2015年5期)2015-12-19 11:04:54
減速頂與調速技術(2015年4期)2015-03-16 03:39:41
時代英語·高三(2014年5期)2014-08-26 02:49:51