自動駕駛轉向測試方案構建
2022-09-06 08:04:22劉育銘張志鵬沙詩偉
時代汽車 2022年18期
劉育銘 張志鵬 沙詩偉
1.北華大學 吉林省吉林市 132000 2.中汽研汽車檢驗中心(常州)有限公司 江蘇省常州市 213100
1 引言
隨著高級駕駛輔助系統在智能駕駛車輛上的應用不斷增多,隨之而來的自動駕駛功能測試需求也在迅速增加。依據美國汽車工程師學會SAE(Society of Automotive Engineers,SAE)自動駕駛等級劃分規定,高級駕駛輔助系統處于具備預警類和輔助干預類功能的階段。目前對自動駕駛輔助系統進行道路測試已經成為必然要求,以保證L2級自動駕駛車輛的安全性與可靠性。
本文圍繞著自動駕駛轉向測試,通過對自動駕駛轉向的實車測試方案的研究,結合國內外現狀及實際道路測試過程,提出方案構建方法,為車企提供思路與參考。
2 國內外現狀
近年來針對高級駕駛輔助系統,國內外成立專項小組開展智能網聯汽車和自動駕駛車輛標準制定工作。中國的全國汽車標準化技術委員會成立了智能網聯汽車分標委,專門從事相關標準制定工作。UNECE 的WP.29于2018 年6 月成立“聯合國智能網聯法律工作組”。國際標準組織ISO 成立 TC22 和TC204,負責道路車輛和智能交通系統。
目前,國內外已經出臺了若干個相關標準,主要面向多類駕駛輔助系統,例如ISO 11270-2014,GB/T 39323-2020 等。但是,對于自動轉向功能測試還尚未有一個適用于符合我國的方案,并且自動轉向測試所涉及的場景與項目較多,仍需研究與發展。
3 測試方案定義與測試基本條件
3.1 功能定義
針對R79 所規定的2 級自動駕駛轉向(Automatically Commanded Steering Function, ACSF)的功能要求,表1 顯示了測試中用到的各功能定義。

表1 功能定義
3.2 測試條件
(1)測試道路:試驗應在具有良好附著力的平坦、干燥的瀝青或混凝土表面上進行。
(2)環境溫度:應保持在0℃~45℃之間。
(3)車道標識:車道標識線應清晰可見,可見度明顯,車道寬度3.5m。
(4)公差范圍:測試速度應滿足±2 公里/小時的公差。
(5)車輛要求:測試過程中車重不得調整,車重和胎壓需符合規定。
(6)橫向加速度:測量確定重心位置,在測量橫向加速度時應去除由于車身自身運動而產生的附加影響。(例如,彈簧產生的)
4 測試項目及要求
測試內容主要包括轉向糾偏 (Corrective Steering Functions, CSF)、緊急轉向(Emergency Steering Functions, ESF)、A-C 類ACSF(Automatically Commanded Steering Function),如表2。

表2 測試內容
4.1 轉向糾偏CSF 測試
轉向糾偏是在一定時間內,通過判斷車上發出的信號,改變車輪的轉向角度,來補償車輛側向力的變化,糾正車道偏離。
(1)警告測試
車輛應在車道兩側有車道標記的道路上使用激活的CSF 駕駛。在測試過程中,記錄CSF 干預的持續時間以及光聲警告信號的持續時間。
(2)覆蓋力測試
車輛應在車道兩側有車道標記的道路上使用激活的CSF 駕駛。行駛時應試圖使車輛離開車道并引起CSF 干預,駕駛員在方向盤上施加一個力,以改變CSF 干預。記錄駕駛員為解除干預而對轉向控制施加的力。
4.2 緊急轉向ESF 測試
緊急轉向功能是指車輛在行駛過程中在一定時間內控制轉向系統進行車輛緊急轉向,來避免或減弱碰撞。
車輛應在每一邊都有車道標記的道路上駕駛,并定位在這些車道標記內。
(1)ESF a 型i/ii 測試:(非故意側移):在相鄰車道行駛的目標車輛應接近被測車輛,其中一輛車應將其橫向分離距離最小化,直到啟動ESF 干預,如圖1 所示。
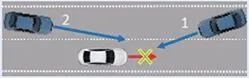
圖1 ESF a 型i/ii 測試場景
(2)ESF a 型iii 測試:(故意側移):當另一輛車在相鄰車道行駛時,被測車輛開始變道,避免了ESF 系統的干預導致碰撞,如圖2 所示。
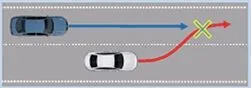
圖2 ESF a 型iii 測試場景
(3)ESF b 型測試:被測車輛應接近位于其軌道內的物體。物體的大小和位置應使車輛能夠在不穿越車道標志的情況下通過該物體,如圖3 所示。

圖3 ESF b 型測試場景
(4)在沒有車道標志的情況下運行系統的測試:如果任何系統在沒有車道標志的情況下工作,則需要在沒有車道標志的測試軌道上重復進行(1)-(3)的測試。
(5)ESF 對b 類誤反應測試:被測車輛應接近位于車輛軌跡上的車道標記之間的一塊與路面顏色對比的塑料片,該塑料片厚度小于3 毫米,寬度為0.8 米,長度為2 米。塑料片的放置方式應使車輛能夠在不穿越車道標志的情況下通過塑料片。
4.3 A 類ACSF
A 類ACSF 功能是指在速度不超過10km/h 的情況下輔助駕駛員在低速或泊車時使用的系統。
(1)系統只能在10km/h(+2km/h公差)的速度下使用。
(2)只有在駕駛員主動操作后,并且滿足運行條件,系統才能激活。并且系統能夠隨時被駕駛員關閉。
(3) 對 于RCP(Remote Controlled Parking,遙控泊車),至少應在遠程控制設備上提供光學警示信號用以警示駕駛員。
遠程遙控泊車如圖4 所示,泊車過程需要駕駛員持續操作遙控裝置,如果連續操作中斷或車輛與遙控設備之間距離超過規定的最大RCP 操作范圍,或者遙控器與車輛之間信號丟失,則車輛應剎停。RCP 的最大操作距離不能超過6m。停車狀態時,應保證車輛不溜車。

圖4 遠程遙控泊車
4.4 B1 類ACSF
B1 類 ACSF 功能由駕駛員開啟,使車輛保持在設定的車道內行駛。
(1)最大橫向加速度要求:如表3 和表4 所示為車輛轉彎時的最大橫向加速度范圍。車輛在轉彎的工況下,要求最大橫向加速度在0.5s 內的平均變化率不超過5m/s。

表3 適用于M1、N1 類車輛轉彎時的最大橫下加速度范圍

表4 適用于M2、M3、N2、N3 類車輛轉彎時的最大橫下加速度范圍
(2)覆蓋力要求:超越系統提供的方向控制所需的轉向控制力不得超過50N,且車輛必須在沒有駕駛員對轉向控制裝置施加任何力(例如把手從轉向控制裝置上移開)的情況下,以恒定速度行駛在每一邊都有行車標志的彎曲軌道上。

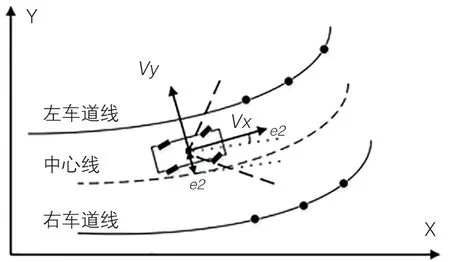
圖5 彎道車道保持示意圖


表5 車道保持測試設計


表6 最大側向加速度測試設計
(3)覆蓋力測試:測試流程與車道保持測試流程類似,彎道行駛的最大側向加速度應在表3 和表4 規定的80%-90%之間,覆蓋力測試設計如表7 所示。車輛行駛時,駕駛員在方向盤上施加一個力,以超過系統干預并離開車道,記錄駕駛員在操縱過程中對方向盤施加的力。
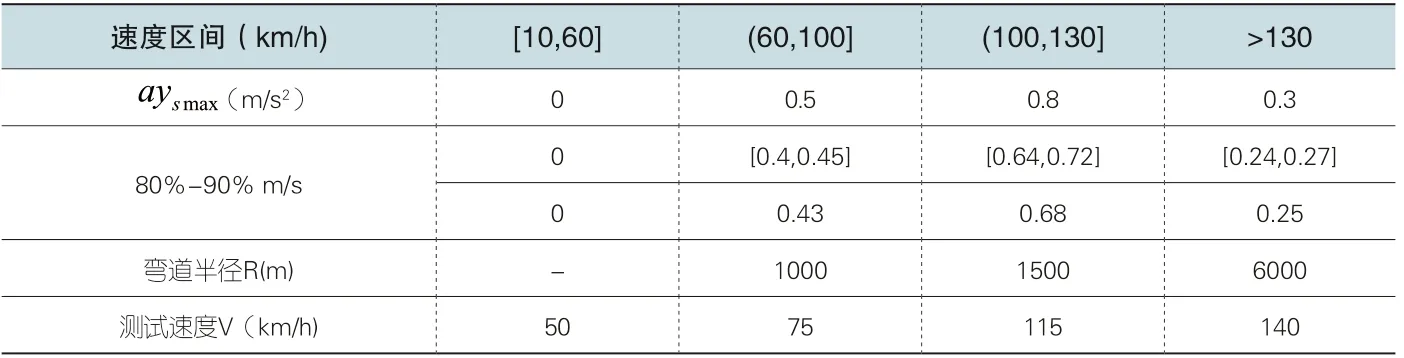
表7 覆蓋力測試設計

4.5 C 類ACSF 測試
C 類ACSF 是由駕駛員激活,并沿著駕駛員指定方向進行橫向移動(如:換道)的系統。


(3)覆蓋力測試:測試流程與變道測試一致,駕駛人控制車輛保持直線行駛。記錄駕駛員在在超越控制中對方向盤施加的力。測試結束后,車輛沿相反方向變道,重復進行測試。
(4)傳感器性能測試:測試流程與變道測試一致,采用DGPS 的方法,測量主車尾端與目標車前端的距離,并記錄車輛探測到后方來車時的兩車距離。
(5)傳感器失效測試:測試流程與變道測試一致,對被測車輛后方傳感器進行遮擋。
5 結論
本文分析了當前有關自動駕駛測試標準國內外現狀,對自動轉向功能測試所需的各個測試項目做出了制定,提出了較為全面的方案。
在設計測試方案或制定標準時,應考慮國內多方面因素。我國應實時跟進新技術進展和國際標準動態,結合國內技術發展水平,同時,在制定自動轉向測試標準時,以中國路試測試數據為基礎,不斷通過驗證來完善測試標準。
通過對自動駕駛車輛進行自動轉向功能測試方案的制定與未來測試的建議,有利于促進我國對智能駕駛車輛自動轉向功能測試方案的制定,并加快更符合我國復雜狀況的自動轉向測試標準的出臺。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
汽車電器(2018年1期)2018-06-05 01:22:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
