基于車輛動力學(xué)模型的動態(tài)質(zhì)量測試方法在非公路寬體車上的應(yīng)用
2022-09-06 08:04:24任宏亮
時代汽車 2022年18期
關(guān)鍵詞:質(zhì)量
任宏亮
西安主函數(shù)智能科技有限公司 陜西省西安市 712000
1 前言
隨著智能化信息化技術(shù)的日趨成熟,無人駕駛技術(shù)在各個行業(yè)得到應(yīng)用,作為礦區(qū)運輸主力產(chǎn)品的非公路寬體自卸車由于其行駛環(huán)境封閉,作業(yè)任務(wù)單一逐漸的被許多無人駕駛科技公司作為首選落地的產(chǎn)品,非公路寬體自卸車作為運輸設(shè)備其無人駕駛的重要意義在于人工智能加持下優(yōu)于人工駕駛的經(jīng)濟性指標(biāo),非公路寬體自卸車的經(jīng)濟性指標(biāo)包括兩個方面,其一是運能,其二是油耗,人工智能代替有人駕駛的控制算法是建立在車輛地面力學(xué)及車輛動力學(xué)模型的基礎(chǔ)上運用現(xiàn)代控制算法對車輛的油門加以控制,而作為控制算法的基礎(chǔ),地面力學(xué)模型和車輛動力學(xué)模型都離不開車輛質(zhì)量這個重要參數(shù),車輛質(zhì)量參數(shù)對于控制算法至關(guān)重要。
2 現(xiàn)有車輛質(zhì)量獲取方法
目前獲取車輛質(zhì)量的方法有離線和在線兩種,離線方法主要是通過傳統(tǒng)的地磅進(jìn)行稱重;在線稱重方法主要有兩種,其一是通過車輛自卸車舉升系統(tǒng)根據(jù)杠桿原理獲取質(zhì)量,此種方法由于貨箱裝載不均衡導(dǎo)致測量誤差較大,;在線稱重的另外一種方法就是通過輪胎胎壓來計算車輛重量,由于輪胎胎壓受溫度影響極大,所以誤差也較大。
3 基于車輛動力學(xué)模型的動態(tài)質(zhì)量檢測算法
3.1 算法基本原理
本算法是要計算車輛的總質(zhì)量,根據(jù)牛頓第二定律可得質(zhì)量、力、加速度的關(guān)系如下所示:

F 為車輛受到的合力,M 為汽車總質(zhì)量,a 為車輛加速度
根據(jù)汽車?yán)碚撥囕v動力及阻力分析可得知車輛所受合力如下所示:

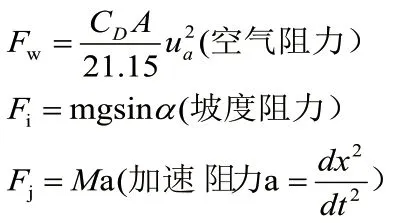
其中:

m:車輛靜態(tài)質(zhì)量 J:車輛總的轉(zhuǎn)動慣量
r:輪胎滾動半徑 R:輪胎測量半徑
T:驅(qū)動功率 i:變速箱傳動比
i:驅(qū)動橋傳動比 η:傳動系總效率
g:重力加速度 α:坡度
f:滾動阻力 C:空氣阻力
A:迎風(fēng)面積 u:車速
根據(jù)以上可推導(dǎo)出動態(tài)質(zhì)量計算公式:
3.2 基本參數(shù)獲取及過程量計算
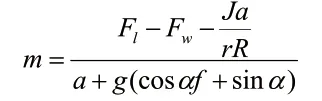
本次測試采用同力重工出產(chǎn)的無人駕駛線控車輛TLI65,其基本參數(shù)如下表1:
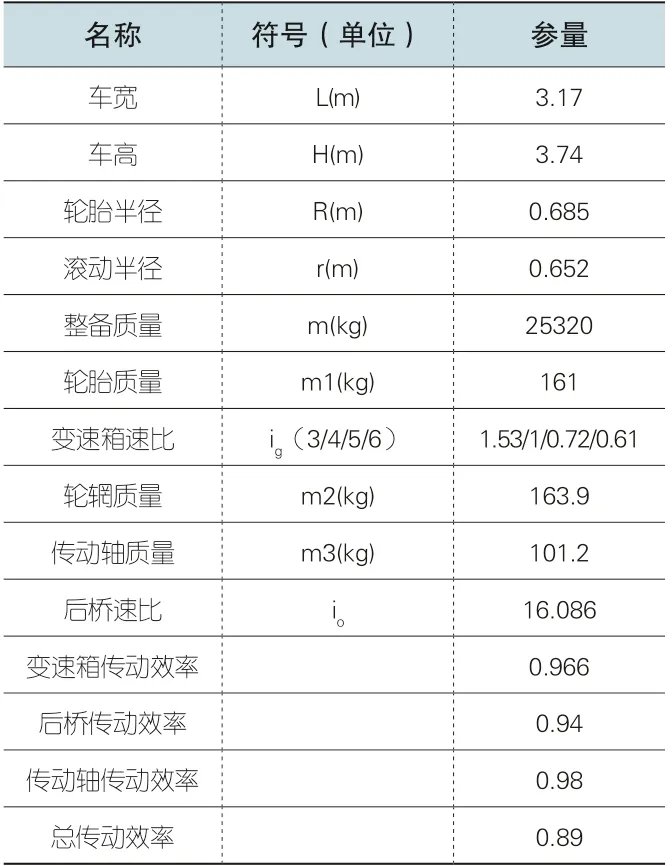
表1
本次測試采用同力重工出產(chǎn)的無人駕駛線控車輛TLI65,其基本參數(shù)如表2 所示:
表2
從上面的計算可以看出半徑較小的棒狀零部件(半軸/慣通軸/傳動軸/變速箱傳動軸等)的轉(zhuǎn)動慣量幾乎可以忽略不記,車輛旋轉(zhuǎn)動態(tài)質(zhì)量占整備質(zhì)量的4.7%;

變速箱在1/2 擋時處于變扭狀態(tài),對外輸出及計算的驅(qū)動力不可靠,所以驅(qū)動力計算及稱重系統(tǒng)質(zhì)量的計算僅在3/4/5/6 擋;
動力系統(tǒng)的內(nèi)耗:發(fā)動機對外發(fā)出的驅(qū)動力沒有扣除發(fā)動機附件(風(fēng)扇/發(fā)電機/油泵/打氣泵/機油泵/轉(zhuǎn)向泵/空調(diào)壓縮機等)消耗的功率,但是從發(fā)動機對外輸出的摩擦損耗數(shù)據(jù)可以看出是由發(fā)動機生廠商根據(jù)臺架上測試數(shù)據(jù)寫入的的幾個階梯固定值,和實際值有一定的誤差,所以發(fā)動機的內(nèi)耗取空擋狀態(tài)下各轉(zhuǎn)速下的驅(qū)動力,由于沒有阻力所以驅(qū)動力基本上等于內(nèi)部消耗的功率,這組曲線作為參數(shù)直接標(biāo)定到計算當(dāng)中去,發(fā)動機內(nèi)耗曲線如圖1 所示:
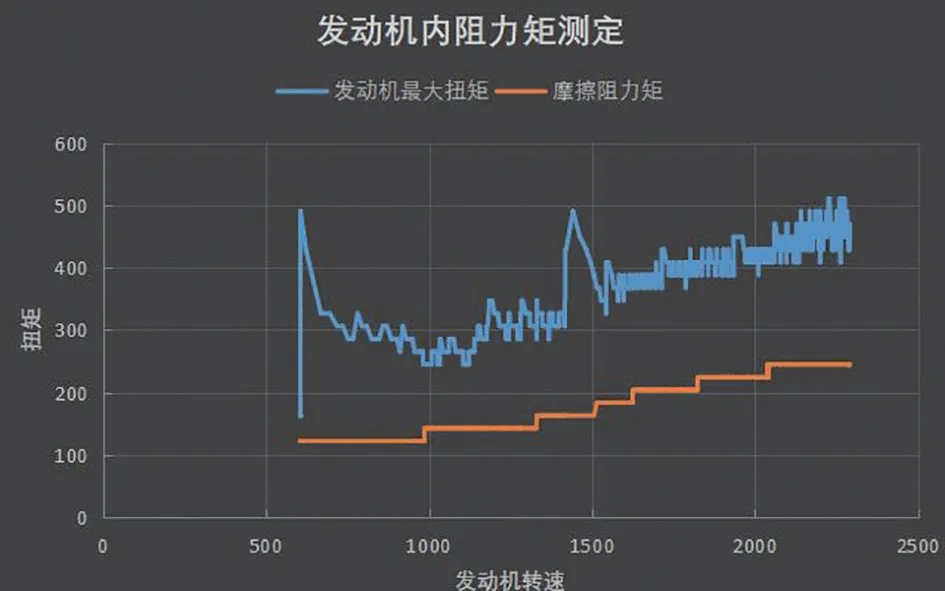
圖1
轉(zhuǎn)向泵的輸出功率會隨著系統(tǒng)油壓的變化而變化,而且轉(zhuǎn)向泵消耗功率附件消耗功率中占比較大不能忽略,所以稱重系統(tǒng)的計算僅取直路行駛(航向或者方向盤轉(zhuǎn)角在零位附近不變時)
3.3 測試平臺及軟硬件架構(gòu)設(shè)計
基于已有無人駕駛線控底盤、慣性測量元件IMU 及無人駕駛計算平臺可搭建此次試驗平臺,平臺如圖2 所示:

圖2
其中線控底盤與計算平臺通過can 總線相連接,計算平臺可通過線控底盤獲取發(fā)動機、變速箱及車輛運行的基本參數(shù),慣性測量元件IMU 與計算平臺通過串口連接,計算平臺通過慣性元件IMU 可獲取車輛行駛方向的加速度及速度信息,計算平臺通過以上數(shù)據(jù)完成實時在線車輛質(zhì)量計算
計算平臺屬于常規(guī)的工控機,該工控機安裝了ubantu16.04 系統(tǒng),動態(tài)質(zhì)量計算系統(tǒng)程序運行在ubantu16.04 系統(tǒng)之上,計算的數(shù)據(jù)流及邏輯圖如圖3 所示:
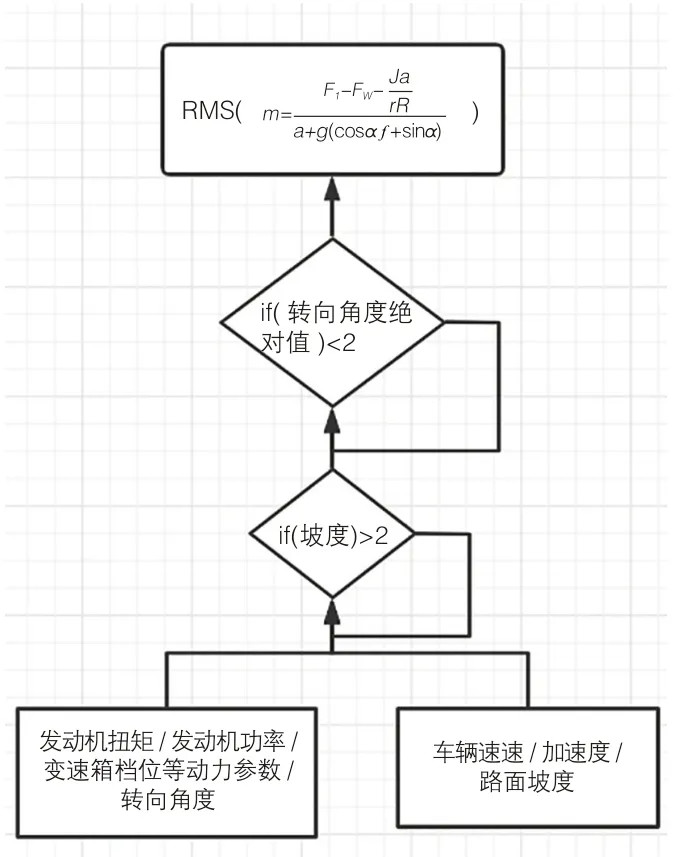
圖3
首先過濾下坡和轉(zhuǎn)向角度大于2 度的數(shù)據(jù),根據(jù)計算公式獲取實時的質(zhì)量信息,在此基礎(chǔ)上需要使用濾波算法濾除加速度和速度異常的數(shù)據(jù),將以上有效數(shù)據(jù)實時求均方根,可得到實時的質(zhì)量數(shù)據(jù),圖4 是專門設(shè)計的實時調(diào)試觀測界面。
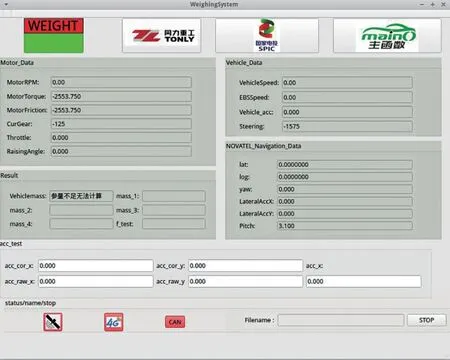
圖4
4 測試結(jié)果及數(shù)據(jù)分析
4.1 測試過程
測試場地說明:
測試過程使用露天煤礦外排工況,選取從裝料區(qū)(海波875 米)到卸料區(qū)(海拔1020 米)的道路來作為測試路段,路徑全長2.5km,全程拔高145 米;
測試過程說明
①首先使用地磅精確測量空載車輛重量,從裝料區(qū)行駛至卸料區(qū),全程測試5 次,記錄數(shù)據(jù);
②在裝料區(qū)使用2.5 方的挖機裝料至滿載,使用地磅精確測量滿載質(zhì)量,從裝料區(qū)行駛至卸料區(qū),全程測試5 次,記錄數(shù)據(jù);
③在裝料區(qū)使用2.5 方的挖機裝料至半載,使用地磅精確測量滿載質(zhì)量,從裝料區(qū)行駛至卸料區(qū),全程測試5 次,記錄數(shù)據(jù);
4.2 測試數(shù)據(jù)分析
①空載測試數(shù)據(jù)分析及過程數(shù)據(jù)
表3 中測試結(jié)果取均方根的平均值,通過以上數(shù)據(jù)可得空載測試數(shù)據(jù)誤差在-1.5%~5.5%之間,根據(jù)圖1-5 數(shù)據(jù)可知由于起步階段阻力較大,所以計算數(shù)據(jù)波動較大,隨著測試數(shù)據(jù)的逐漸積累測試結(jié)果逐漸逼近實際數(shù)據(jù),且隨著車輛行駛時間越長數(shù)據(jù)誤差越小,400 秒后數(shù)據(jù)已經(jīng)進(jìn)入±5%范圍內(nèi)了。

表3
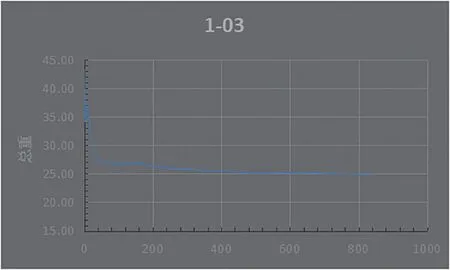
圖5
②滿載測試數(shù)據(jù)分析及過程數(shù)據(jù)
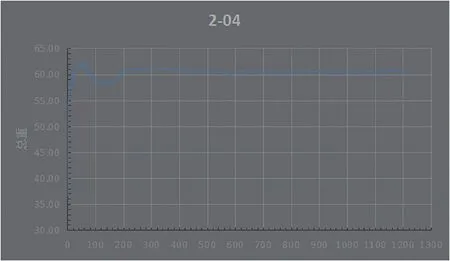
圖6
由表4 數(shù)據(jù)可得滿載測試數(shù)據(jù)誤差在-3.1%~4.8%,如圖1-6 數(shù)據(jù)可知滿載數(shù)據(jù)收斂比空載要快,由于發(fā)動機動力部分的輸出較大,路面阻力所占比例逐漸減小,所以數(shù)據(jù)在200 秒后的誤差已經(jīng)在±5%范圍內(nèi)了。

表4

表5
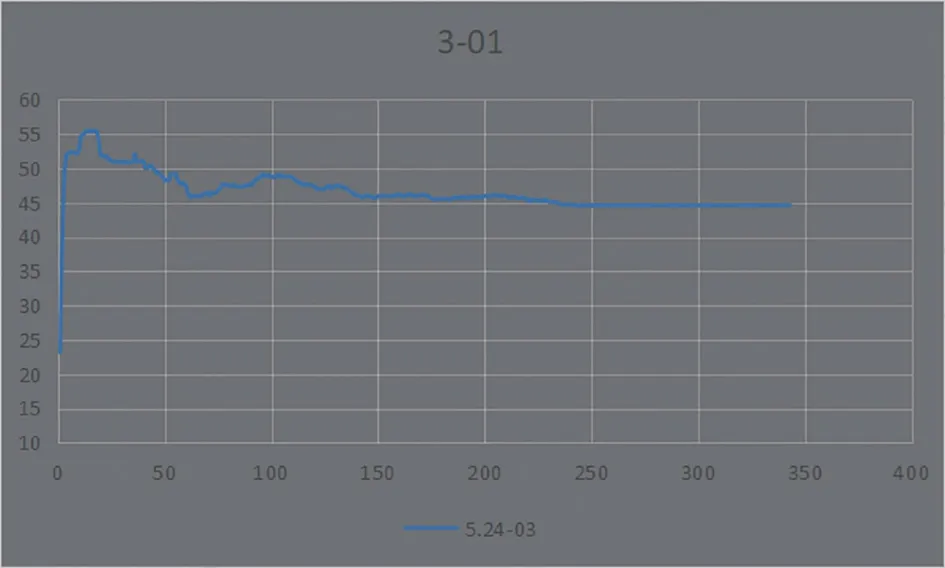
圖7
③半載測試數(shù)據(jù)分析及過程數(shù)據(jù)
由表1-5 數(shù)據(jù)可得半載測試數(shù)據(jù)誤差在-2.73%~4.59%,從如1-7 數(shù)據(jù)可知數(shù)據(jù)在200 秒后的誤差已經(jīng)在±5%范圍內(nèi)了。
5 結(jié)論
本文研究了非鋪裝道路情況下非公路寬體車的動態(tài)質(zhì)量測定問題,提出了基于車輛動力學(xué)模型的動態(tài)質(zhì)量測試方法,首先建立了精確的車輛動力學(xué)模型及地面力學(xué)模型,其次利用現(xiàn)有非公路寬體自卸車無人駕駛平臺搭建了測試軟硬件環(huán)境,針對測試過程的數(shù)據(jù),先是精確標(biāo)定發(fā)動機的凈輸出功率,剔除轉(zhuǎn)向系統(tǒng)消耗的功率誤差,只選取直線行駛的數(shù)據(jù),最后針對所有異常數(shù)據(jù)做了過濾取均方根值作為最后的計算結(jié)果,通過對比試驗及數(shù)據(jù)分析可知該方法有效且可行。
針對非道路環(huán)境的動態(tài)質(zhì)量檢測具有很大的現(xiàn)實意義,對于無人駕駛車輛經(jīng)濟性控制算法具有決定性作用,所以動態(tài)質(zhì)量的測試方法是我們未來繼續(xù)研究和探索的方向。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年10期)2022-11-10 09:37:42
中學(xué)生數(shù)理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(shè)(2018年6期)2018-04-22 03:16:54
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
中學(xué)生數(shù)理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
