基于工程車輛應急制動系統的應用研究
2022-09-06 08:04:26田興春牟均發任宏亮何銀濤王堅剛
時代汽車 2022年18期
田興春 牟均發 任宏亮 何銀濤 王堅剛
西安主函數智能科技有限公司 陜西省西安市 710076
在當前智慧礦山、綠色礦山升級改造的大趨勢之下,針對露天礦山運輸環節的智能化、綠色化開展研究,形成露天礦山無人化運輸作業系統,不僅可以有效推動礦區高效、安全、綠色與可持續發展,切實增強企業的核心競爭力,還可以有效促進露天開采智能化核心技術體系的形成,創造采礦行業的新技術高度,更是我國采礦行業由大變強,實現兩化融合的重要標志,具有影響深遠的重大意義。
露天礦山采掘運輸環境:粉塵大、工況惡劣、地處偏遠、有輻射,礦車司機及現場作業人員面臨嚴重的職業健康危機,如腰椎病、塵肺病等,司機從業意愿低,故礦車司機與現場作業人員的年齡基本處于45 歲以上。惡劣的作業環境,導致招聘合適的礦車司機越來越困難,加之運輸及作業成本居高不下,存在難以高效協同作業等問題。更加重要的是,礦區作業是封閉場景下的低速固定任務,任務單一性、路線固定性等特點非常適合自動駕駛的測試、落地及發展。因此,露天礦山采用無人運輸作業技術具有現實的需求。
國際上露天礦區無人駕駛系統已經走過了研究、試驗和小范圍應用階段,日本小松與美國卡特彼勒均于20 世紀80 年代進行礦山裝備無人駕駛相關研究工作,應用實踐證明了其顯著的優越性,該技術具有廣闊的應用前景。
伴隨國內外無人駕駛技術的不斷進步,針對露天礦區的應用逐漸加深,露天礦區無人運輸產業化落地需求正被不斷地向前進行推進,無人駕駛技術在露天礦區的產品化應用正逐步向市場化進行發展。
無人駕駛技術在露天礦區落地的前提必須確保車輛底盤系統的線控可靠性和系統安全性,因露天礦區工況復雜,連續坡道較多且坡度較大,礦區工程運輸車輛能安全行駛的前提是必須確保制動安全:對無人駕駛工程車輛制動性能要求必須嚴格。
為保障礦區運營能更加安全且高效,本文提出在無人駕駛線控工程車輛(或線控運輸設備)主制動系統—EBS(Electronic Brake Systems,電子制動系統)的基礎上增加應急制動功能。
1 應急制動系統原理
1.1 氣路系統組成
應急制動氣路系統主要由氣源(儲氣室)、控制氣路執行元件、EBS 單通道閥、EBS 雙通道閥、制動氣室及若干氣管路等組成。
1.2 氣路連接原理
氣路連接原理簡圖如圖1 所示:控制氣路執行元件進氣口連接氣瓶,出氣口分別連接EBS 單、雙通道閥控制口;EBS 單通道閥進氣口連接氣瓶,出氣口分別連接前橋兩個制動氣室;EBS 雙通道閥進氣口連接氣瓶,出氣口分別連接中后橋四個制動氣室。行車制動過程中,可實現氣源(儲氣室)、控制氣路執行元件、EBS 單、雙通道、前橋制動氣室、中后橋制動氣等氣路形成通路,確保行車制動動作完成。
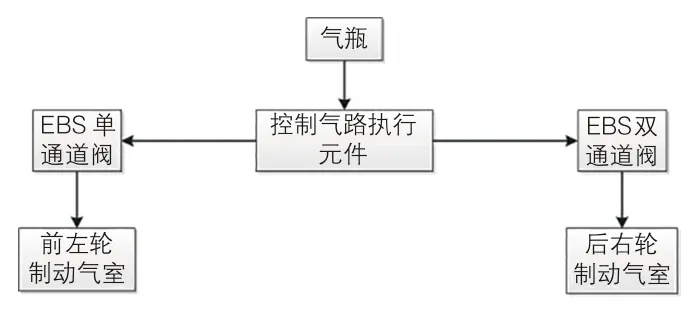
圖1 應急制動氣路控制簡圖
2 應急制動系統控制邏輯設計
2.1 EBS 制動系統
EBS 工作邏輯:自動駕駛行車過程中,整車控制單元VCU(Vehicle Control Unit)獲取到自動駕駛給定的實際需求減速度(不為零——需要減速或停車),按通信協議轉換并轉發至主制動EBS 控制器,EBS 控制器根據接收到的控制減速度與外部制動指令直接控制EBS 單、雙通道閥開度,使氣瓶至制動氣室形成通路,實現制動氣室充氣,最終完成車輛行車制動動作。
2.2 EBS+應急制動系統
應急制動工作邏輯:自動駕駛行車過程中,當整車控制單元VCU(Vehicle Control Unit)獲取到自動駕駛給定的減速度(不為零——需要減速或停車)時,如VCU 監控到主制動EBS 系統(VCU 會實時監測線控底盤各零部件工作狀態)出現致命故障——不受減速度指令控制時,VCU 將接收到的需求減速度轉換為應急制動控制所需的占空比,并輸出控制信號(控制電壓)至控制氣路執行元件,從而控制EBS 系統通道閥開度,完成氣源(儲氣室)向制動氣室的充氣,最終完成工程車輛的行車制動動作。
控制邏輯如圖2 所示:
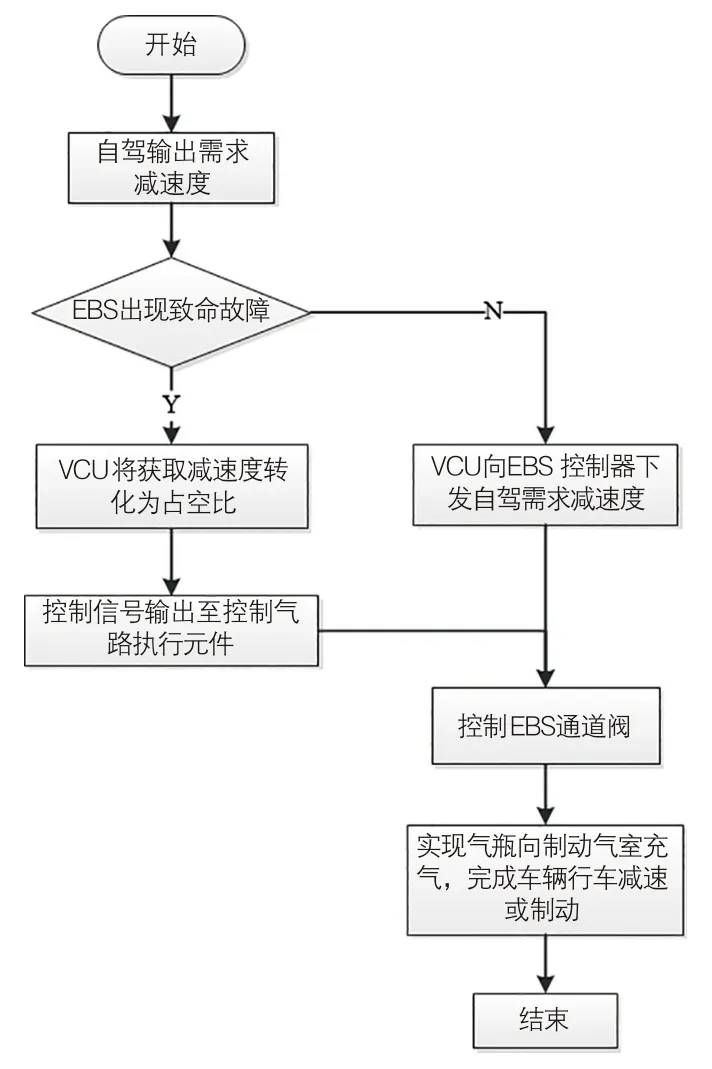
圖2 應急系統控制邏輯圖
3 運行測試與數據分析
3.1 測試方案簡述
空載應急制動測試:以10km/h、20km/h、30km/h 車速作為初始制動速度,以10% ~26% 區間內不同占空比為控制參數進行應急制動減速度數據及性能測試,每一組測試(固定車速、固定占空比)次數5 次;
滿載應急制動測試:以10km/h、20km/h、30km/h 車速作為初始制動速度,以10% ~37% 區間內不同占空比為控制參數進行應急制動減速度數據及性能測試,每一組測試(固定車速、固定占空比)次數5 次;
3.2 測試場地
測試場地為一段布滿沙礫的平整路段,該路段東西長約600 米,南北寬約10 米,路面整體硬實平整干燥無積水;路面現場如圖3 所示:
3.3 載荷類別
測試載荷分為空載與滿載,滿載載物為沙土,空載重量25 噸,滿載重量60 噸。空滿載如圖3、4 所示:

圖3 測試車輛空載圖

圖4 測試車輛滿載圖
3.4 測試數據分析
由圖5 可知,靜態測試下,控制氣路執行元件的工作電流與工作電壓隨控制占空比的增加呈線性增加趨勢;工作電流的增長趨勢較工作電壓的增長明顯;工作電流及工作電壓的增長線性度在占空比為17% 之后更優。

圖5 電流及電壓趨勢圖
由圖6 可知,空載條件下,最大減速度可至-5.18m/s;
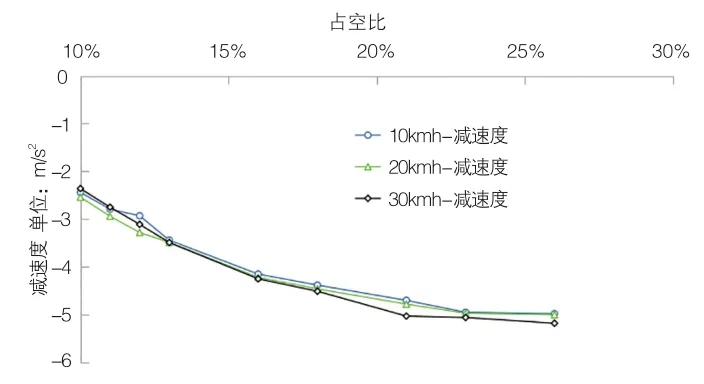
圖6 空載條件不同占空比下不同制動初始速度減速度趨勢圖
當制動初速度為10km/h 時,控制占空比在10% ~23% 區間,實際減速度隨控制占空比增加而增大,當控制占空比大于等于23% 時,實際減速度無明顯增加;
當制動初速度為20km/h 時,控制占空比在10% ~23% 區間時,實際減速度隨控制占空比增加而增大;
當制動初速度為30km/h 時,控制占空比在10% ~21% 區間,實際減速度隨控制占空比增加而增大,當控制占空比大于等于21% 時,實際減速度無明顯增加;
空載測試數據的3 組不同制動初始速度的實際減速度曲線呈現較好的線性度,當控制占空比達到某一臨界點值,整車實際減速度到達最大值,此后整車實際減速度將不會隨控制占空比的增加而增大,而是將維持在最大減速度左右小范圍內波動變化。
由圖7 可知,滿載條件下,最大減速度可至-2.86m/s;
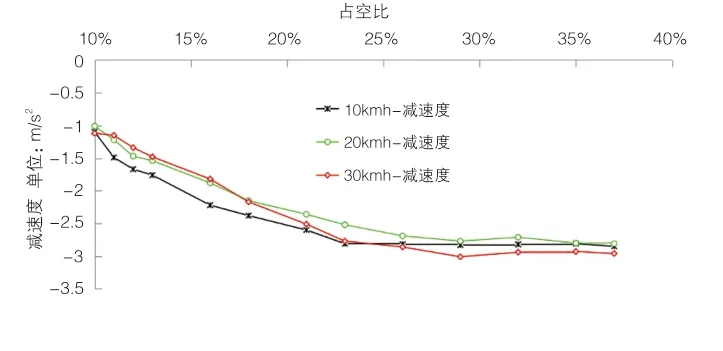
圖7 滿載條件不同占空比下不同制動初始速度減速度趨勢圖
當制動初速度為10km/h 時,控制占空比在10% ~23% 區間時,實際減速度隨占控制空比增加而線性增大,當控制占空比大于等于23% 時,實際減速度無明顯增加;
當制動初速度為20km/h 時,控制占空比在10% ~29% 區間時,實際減速度隨控制占空比增加而線性增大,當控制占空比大于等于29% 時,實際減速度無明顯增加;
當制動初速度為30km/h 時,控制占空比在10% ~29% 區間時,減速度隨占空比增大而增大,當控制占空比大于等于29% 時,實際減速度無明顯增加;
同空載測試數據相比,滿載測試數據的3 組不同制動初始速度的實際減速度曲線線性度較空載略差;相同的是控制占空比達到某一臨界點值,整車實際減速度到達最大值,此后整車實際減速度將不會隨控制占空比的增加而增大,而是將維持在最大減速度左右小范圍內波動變化;由于滿載質量大,故滿載測試數據的臨界控制占空比的數值大于空載。
4 結論
(1)靜態條件下,控制氣路執行元件工作電流、電壓隨占空比逐漸增加而增大;工作電流的增長趨勢較工作電壓的增長趨勢明顯;
(2)空、滿載條件下,不同制動初速度減速度曲線隨占空比增加而增大,但超過固定值后趨于平緩,減速度曲線整體線性度較好;滿載的控制占空比臨界值大于空載;
(3)控制氣路執行元件的控制最大功效占空比隨制動初速度的增加而增大;
(4)空載條件下,應急制動最大減速度可達到-5m/s左右;滿載條件下,應急制動最大減速度可達到-2.8m/s左右;二者均能滿足工程車輛在實際工作中的行車制動要求。
