永磁同步電動機位置伺服系統的自適應神經網絡控制
2022-09-29 10:53:52于洋,吳峰,王巍
工程數學學報 2022年4期
關鍵詞:設計
于 洋, 吳 峰, 王 巍
(遼寧工業大學電氣工程學院,錦州 121001)
0 引言
永磁同步電動機結構簡單、可靠性高、效率高,已廣泛應用于工業機器人、半導體制造系統和機床加工等領域中[1]。永磁同步電動機是一個典型的非線性、多變量、強耦合系統,導致傳統的矢量控制方法往往不能滿足要求。文獻[2]基于反饋線性化設計,將反步遞推控制應用于永磁同步電動機伺服系統,但是控制算法忽略了參數變化和外部負載擾動等不確定因素對控制性能的影響。為此,一些先進的控制方法,包括自適應控制、自抗擾控制、滑模變結構控制等應用到永磁同步電動機伺服系統的控制中[3–7]。
由于神經網絡/模糊邏輯系統具有對非線性系統辨識和建模能力,因此基于神經網絡/模糊邏輯系統的智能自適應控制,不依賴于控制對象的數學模型,適應性和魯棒性好,適用于解決永磁同步電動機伺服系統的控制問題[8–9]。文獻[10]提出了一種自適應神經網絡反步遞推控制方法,能夠克服不確定性因素對伺服系統控制性能的影響。文獻[11–12]利用模糊邏輯系統在線估計和補償未知函數,提出了基于自適應模糊反步遞推的位置跟蹤控制方法。文獻[13]基于反步遞推控制設計,提出了自適應模糊轉速跟蹤控制算法。然而,文獻[10–13]提出的控制算法需要對虛擬控制信號反復求導,會出現“復雜性爆炸”問題。針對此問題,文獻[14–15]通過引入濾波器估計虛擬控制信號的導數,提出了基于濾波器的自適應神經網絡控制算法,克服了反步遞推控制設計中存在的“復雜性爆炸”問題。然而,上述自適應神經網絡/模糊控制算法在控制設計中存在代數環問題,這在控制設計中是不允許的[16]。綜合上述分析,本文擬針對考慮參數變化和外部負載擾動的永磁同步電動機伺服系統,提出一種新型自適應神經網絡控制算法。與現有研究結果相比,本文主要創新如下:
1) 應用神經網絡基函數的本質特征,在控制設計中引入補償項,解決現有基于反步遞推的電動機伺服系統控制設計中存在的代數環問題;
2) 采用動態面控制技術設計的自適應神經網絡控制算法不僅可以克服不確定性因素對系統性能的影響,而且控制器結構簡單,可以提高電動機位置伺服系統跟蹤誤差的收斂速度。
1 問題描述
1.1 永磁同步電動機的數學模型
在假設磁路不飽和、忽略磁滯、渦流損耗的影響、空間磁場呈正弦分布的條件下,永磁同步電動機在d–q坐標系下的數學模型為
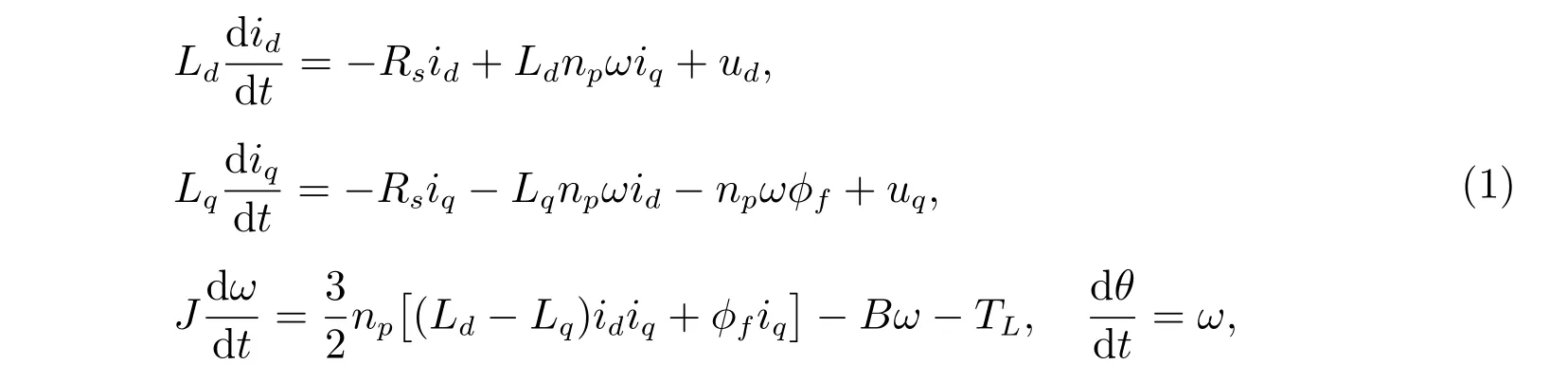
式中id和iq為定子繞組d–q軸電流,θ和ω分別為電機轉子轉角和角速度,ud和uq為定子繞組d–q軸電壓,是系統的控制輸入。其它參數定義如下:
1)Ld和Lq為定子繞組直、交軸電感;
2)np為電機極對數,?f為轉子永磁體產生的磁勢,Rs為定子電阻;
3)J為轉動慣量,B為摩擦系數,TL為負載轉矩。
定義x1=θ,x2=ω,x3=iq,x4=id,則永磁同步電動機的數學模型可以表示為

式中

注意到,上述模型中f1(·)包含狀態變量x3和x4,f2(·)包含狀態變量x4。因此,模型(2)屬于非嚴格反饋系統。若采用傳統的反步遞推控制設計方法,會存在代數環問題。控制目標:對于永磁同步電動機位置伺服系統,設計自適應神經網絡控制器,使其位置輸出能夠跟蹤給定的位置參考信號xr。假設給定的位置信號二階可導,且各階導數有界。
1.2 RBF 神經網絡
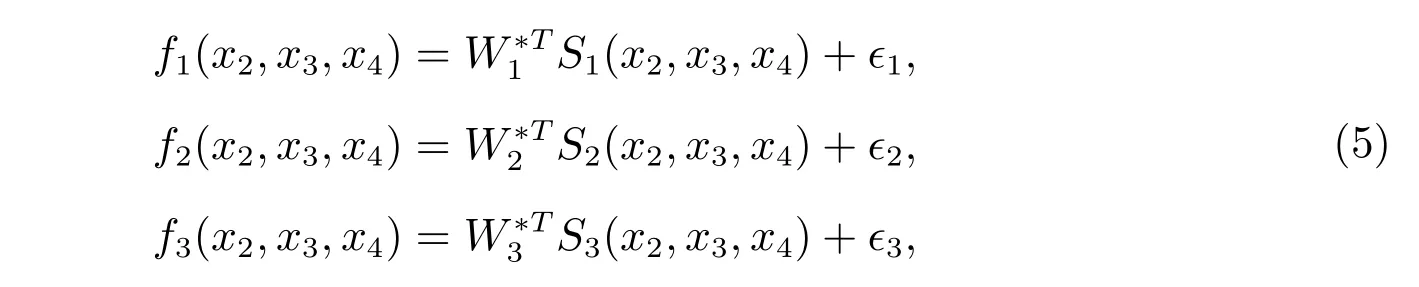
由于電動機的轉動慣量、摩擦系數、負載轉矩、定子電阻在運行過程中會發生變化,不容易測量。因此,模型(2)中f1(·)、f2(·)、f3(·)均為不確定非線性函數。本文利用RBF 神經網絡在線辨識不確定非線性函數,對于任意定義在緊致集合內的連續函數f(x),均可以表示為

式中W?∈Rl是神經網絡的理想權值向量,S(x) = [S1(x),S2(x),···,Sl(x)]∈Rl是神經網絡基函數,?為最小逼近誤差,l是神經元個數。S(x)通常選取為高斯函數其中χh ∈Rn,υh(h= 1,2,···,l)是高斯函數的中心點和寬度。由上式可以得到ST(x)

S(x)≤l。
根據Stone Weierstrass 逼近定理[17]:在緊致集合內,對于任意小的?,一定存在足夠大的l?,使得W?TS(x)能夠以任意精度逼近函數f(x)。因此,模型(2)中的非線性函數f1(·)、f2(·)、f3(·)可以利用RBF 神經網絡進行逼近,具體可以表示為
2 自適應神經網絡控制設計
本節在反步遞推設計框架下,針對模型(2),設計自適應神經網絡動態面控制算法,實現電動機伺服系統的位置跟蹤控制,具體設計過程如下。
步驟1定義跟蹤誤差s1=x1?xr,由模型(2)得到

設計第一個虛擬控制器

式中k1>0 是設計參數。
選取Lyapunov 函數

對其求導,并將(6)式和(7)式代入,得到

避免對虛擬控制器反復求導,產生“復雜性爆炸”問題,引入濾波器[18]

式中τ1>0 是濾波器的時間常數。
步驟2選取誤差變量s2=x2?ˉx2d,由(2)式、(5)式、(10)式,得到

若按照傳統的反步遞推控制設計,虛擬控制器將被設計為

式中k2>0 是設計參數,W1是的估計。
注意到,(12)式中包含狀態變量x3和x4(步驟2 的虛擬控制器設計只能利用狀態變量x1和x2)。因此,虛擬控制器x3d的設計存在代數環問題,這在控制設計過程中是不允許的。
為避免控制設計中存在的代數環問題,選取Lyapunov 函數(13)進行虛擬控制器設計

由Young’s 不等式,可得

式中ρ>0 是設計參數。
由(14)式和(15)式,可以得到

將虛擬控制器設計為

神經網絡參數自適應律設計為

式中σ1>0, ˉσ1>0 是設計參數。
由(17)式和(18)式可以看出,本文通過引入與神經網絡權值模相關的自適應參數設計虛擬控制器x3d,使其僅與狀態變量x1和x2相關,避免了(12)式中存在的代數環問題。由(16)~(18)式,可以得到

避免對虛擬控制器反復求導,引入一階濾波器

式中τ2>0 是濾波器的時間常數。
步驟3選取誤差變量s3=x3?,由(2)式、(5)式、(20)式,得到

若按照傳統反步遞推控制設計uq,仍存在代數環問題。因此,選取Lyapunov 函數
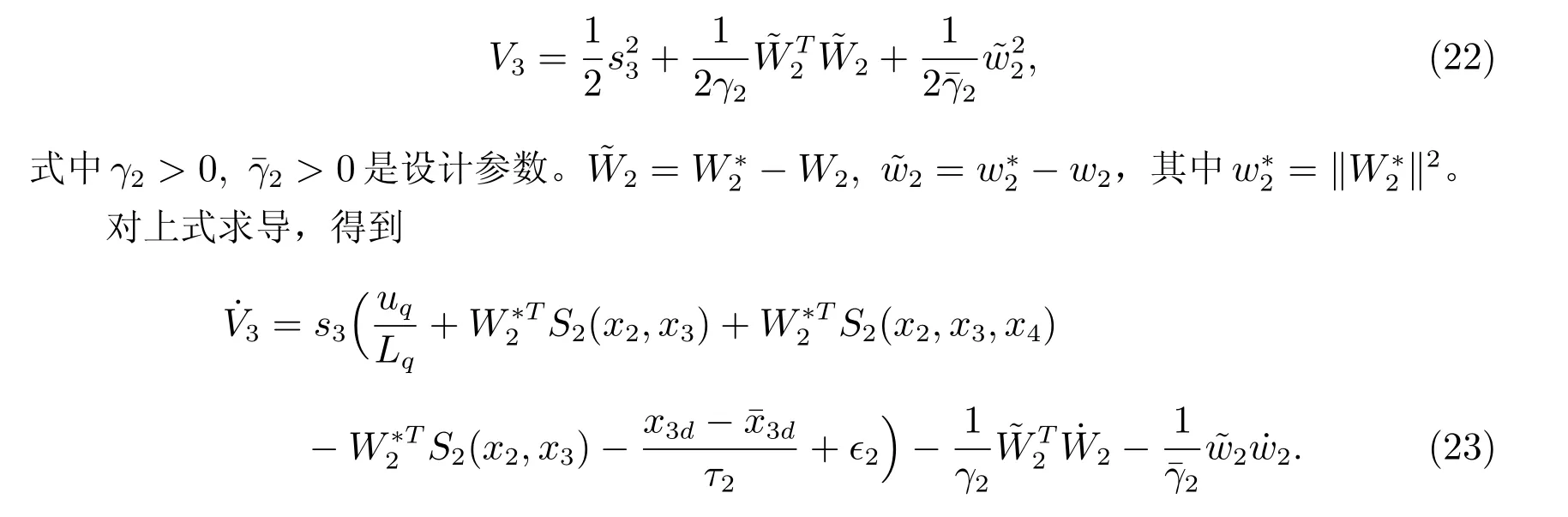
類似于步驟2 的設計過程,利用Young’s 不等式,上式可以表示為

選取實際控制器uq如下

式中k3>0 是設計參數。
神經網絡參數自適應律設計為

式中σ2>0,>0 是設計參數。
由(25)式和(26)式可以看出,本文設計的虛擬控制器uq僅與狀態變量x1、x2、x3相關,避免了代數環問題。由(24)~(26)式,可以得到

步驟4定義誤差變量s4=x4,由(2)式和(5)式,得到

選取Lyapunov 函數

對上式求導,得到

選取實際控制器ud如下

式中k4>0 是設計參數。
神經網絡參數自適應律設計為

式中σ3>0 是設計參數。
由(30)~(32)式,可以得到

3 穩定性分析
基于本文提出的自適應神經網絡動態面控制算法,永磁同步電動機位置伺服系統的穩定性由下面的定理給出。
定理1對于永磁同步電動機位置伺服系統,在虛擬控制器(7)、(17)和實際控制器(25)、(31)作用下,并將神經網絡參數的自適應律設計為(18)、(26)、(32),則閉環伺服系統所有信號一致最終有界,轉子轉角能夠跟蹤給定參考信號且跟蹤誤差收斂到零點的極小鄰域內。
選取如下Lyapunov 函數

由一階濾波器(10)和(20),可以推導出

其中

定義緊致集合

式中q0>0,p>0。因此M1(·)、M2(·)在緊致集?1×?2上是有界的,上界記為M1b、M2b。
對(34)式求時間導數,并將(9)式、(22)式、(27)式、(33)式、(35)式代入,得到

利用Young’s 不等式,上述不等式可以進一步表示為


式中η1>0,η2>0 是設計參數。選取設計參數,使其滿足

定義

則上述不等式表示為

求解上面積分不等式,得到

當t →∞時,|s1|≤,而且通過調節設計參數,可以使跟蹤誤差(x1?xr)收斂到零點的極小鄰域內。
4 仿真結果及分析
本節驗證本文提出的自適應神經網絡動態面位置跟蹤控制算法的有效性。設置永磁同步電動機的參數為[1]

控制算法的設計參數選取為

每個神經網絡選取5 個神經元,神經網絡權值的初始條件設置為零,給定位置參考信號xr=sin(2t)rad。
仿真結果如圖1 至圖6 所示。永磁同步電動機的位置跟蹤效果如圖1 所示,神經網絡對系統不確定性的逼近效果如圖2 至圖4 所示,系統控制輸入uq和ud如圖5 和圖6 所示。由仿真結果可以看出,本文提出的控制算法能夠保證永磁同步電動機伺服系統準確快速地實現位置跟蹤控制,并且所設計的神經網絡能夠很好地補償伺服系統的不確定性。將本文所提控制算法與文獻[11]中的控制算法相對比,在選取相同控制增益情況下,跟蹤誤差的收斂速度的對比情況如表1 所示。由表1 可以看出,基于本文提出的自適應神經網絡動態面控制的位置伺服系統的跟蹤誤差具有更快的收斂速度。
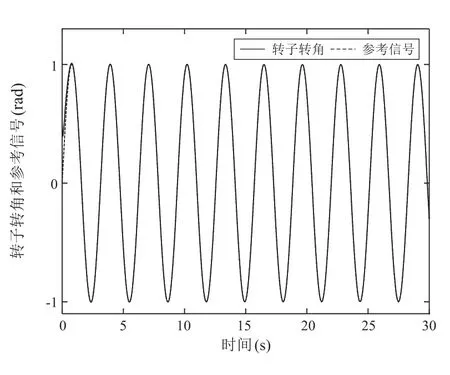
圖1 位置跟蹤曲線
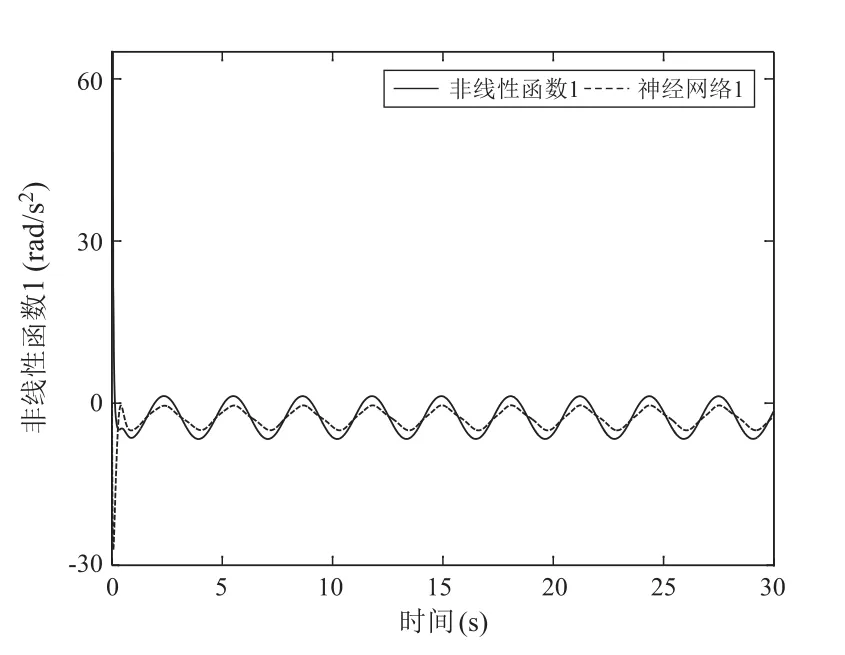
圖2 神經網絡1 的逼近效果
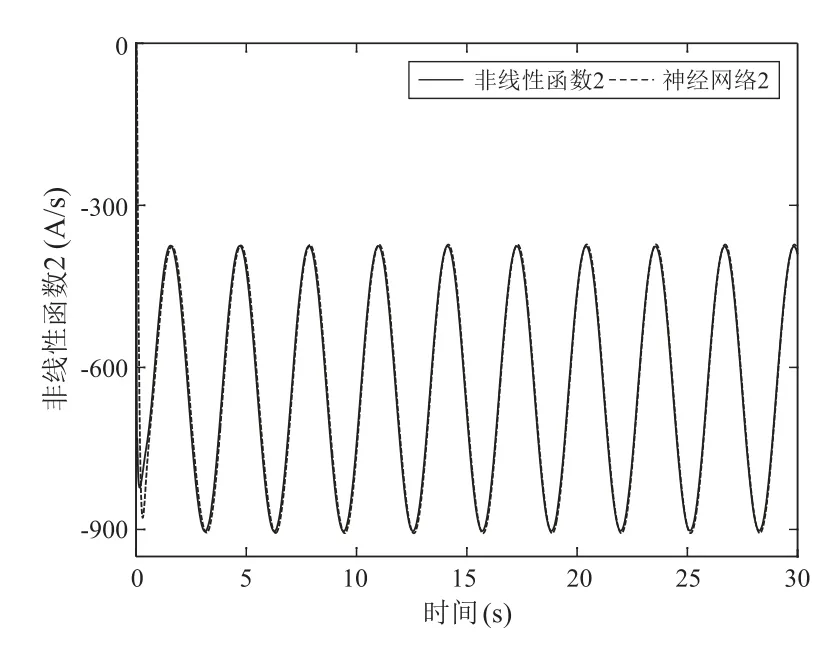
圖3 神經網絡2 的逼近效果
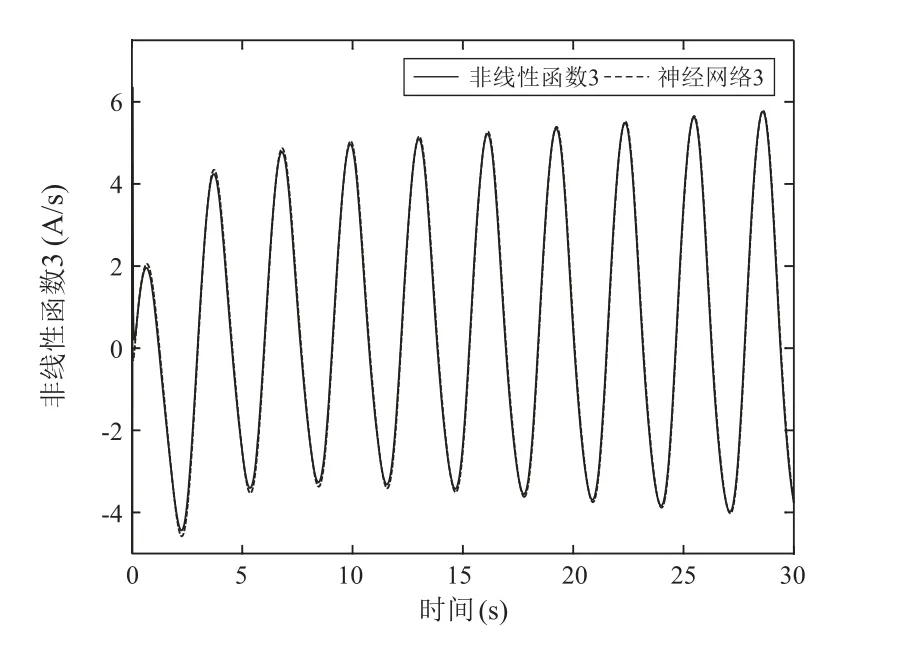
圖4 神經網絡3 的逼近效果
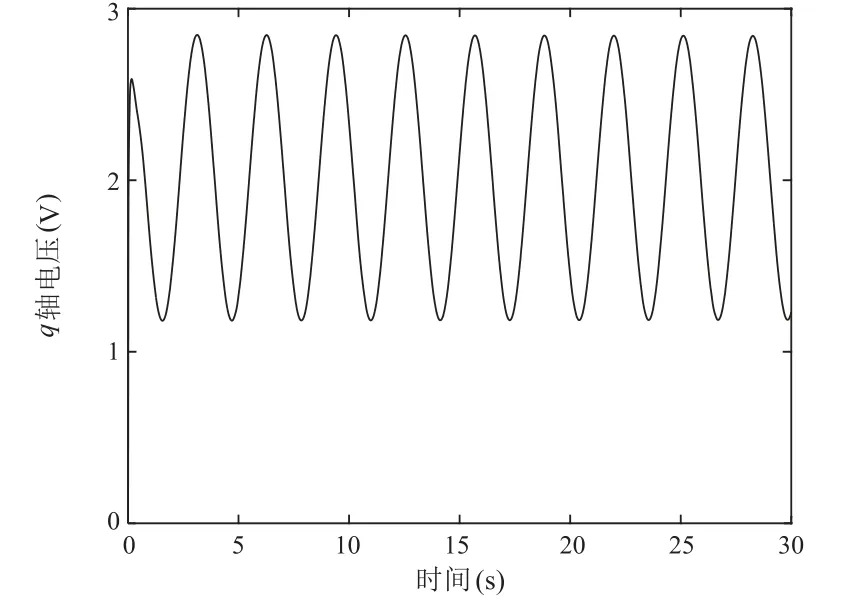
圖5 控制輸入uq 曲線
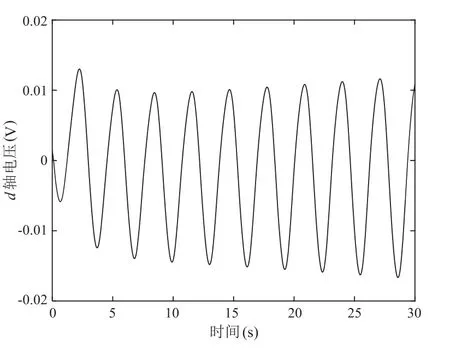
圖6 控制輸入ud 曲線

表1 跟蹤控制性能對比(不同時間對應的|x1 ?xr|)
5 結論
本文研究了永磁同步電動機位置伺服系統的控制問題。利用神經網絡在線辨識、補償系統的不確定性,并應用神經網絡基函數的本質特征,設計了一種新型的自適應神經網絡動態面控制算法。本文所提的控制算法避免了現有基于反步遞推的伺服系統控制設計方法中存在的代數環問題,仿真結果進一步驗證了基于本文控制算法的永磁同步電動機伺服系統能夠準確快速地跟蹤給定參考信號,且對系統不確定因素具有良好的魯棒性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04