增程式混合動力汽車能量管理策略設計與優化研究
2022-10-11 13:31:14馮仁華孫旺兵趙智超王韶陽陳昆陽
重慶理工大學學報(自然科學) 2022年8期
馮仁華,孫旺兵,趙智超,王韶陽,陳昆陽,郭 棟
(1.重慶理工大學 車輛工程學院, 重慶 400054;2.重慶理工大學 汽車零部件先進制造技術教育部重點實驗室, 重慶 400054;3.中國汽車工程研究院有限公司, 重慶 401122)
0 引言
隨著汽車保有量的迅速攀升,車輛對能源的需求量急劇增加,傳統燃油車在行駛過程中會釋放大量有害氣體,造成了環境污染。據估計,汽車產生的污染物占全球大氣污染的42%[1]。為了節約能源和保護環境,新能源汽車在研發和制造多方面得到了政府和企業的大力支持[2-3],并取得了一定的成果。由于目前動力電池技術發展不夠成熟,以及車輛充電設施建設不夠完善,純電動汽車相比于傳統的燃油車,存在著行駛里程短、生產成本高、充電不便利等問題,無法從根本上滿足人們的日常需求[4]。在這種情況下,增程式混合動力汽車應運而生。它擁有發動機和動力電池2個動力裝置且能夠相互配合工作,能夠很好地解決純電動汽車動力不足、“里程焦慮、空調焦慮”等問題[5]。因此,增程式混合動力汽車逐漸成為企業及高校學者的研究熱點。
增程式混合動力汽車設計研發的關鍵技術是制定合理有效的控制策略。不同的控制策略會影響增程式混合動力汽車的動力性和燃油經濟性[6]。為了充分展現增程式混合動力汽車低能耗、低排放等優勢,需要對整車控制策略進行詳細研究與分析。國內外對增程式混合動力汽車的控制策略研究主要有基于規則型控制策略、全局最優控制策略和智能控制策略[7]。使用全局最優控制策略需要進行大量的運算,在控制系統中,對整車硬件的配置要求比較高,導致成本增加,不利于應用到實際工程中[8]。近年來,智能型控制策略(模糊控制、神經網絡等)被廣泛應用,但該策略的控制比較復雜,而且需要富足的先驗知識,因此,在實車上應用存在很大的難度[9]。當前市面上所生產的增程式車型中應用較為廣泛的是基于規則型的整車能量控制策略,該策略通常可以分為恒溫器型控制策略[10]、功率跟隨控制策略[11]和定點控制策略等[12]。應用恒溫器型控制策略時,發動機的啟停由動力電池荷電狀態(SOC)的閾值所決定。該控制策略下,動力電池會不停地充放電,導致動力電池形成不可逆轉的損傷,壽命大打折扣[13]。國內外關于增程式混合動力汽車整車控制策略的制定與研究,使用較多的是功率跟隨和定點控制這2種策略。劉漢武等[13]針對增程式電動汽車多點控制策略優化問題,提出了一種基于多目標參數優化結果的增程器能量管理控制策略,分析了不同控制策略對輔助動力裝置(APU)輸出功率、電池電流及SOC的影響。鄧智輝等[14]提出了雙電量消耗模式-電量保持模式(CD-CS)多工作點控制策略,在不同行駛工況下分別對雙CD-CS多工作點控制策略、恒溫器控制策略、混合多工作點控制策略進行仿真驗證。然而,功率跟隨和定點控制這2種控制策略在同一臺車上,對其整車性能、油耗和主要部件影響特性進行較為全面的研究較少。據此,基于數據庫和部分零部件試驗結果,建立了某增程式混合動力汽車仿真分析模型,并設計了功率跟隨和定點控制2種能量管理控制策略,對功率跟隨中的充電功率系數、定點控制中的發動機輸出功率值進行了優化,然后對比分析了該增程式混合動力汽車2種策略下在世界輕型汽車測試循環(WLTC)工況下燃油經濟性的特性,并研究了2種控制策略下發動機工況及效能、電池SOC、電池輸出功率、發電機工作點及效能等特性,為該增程式混合動力汽車的后續研究和進一步優化提供了一定的參考。
1 仿真模型建立
1.1 整車基本參數
本研究中的增程式混合動力汽車由一臺直列四缸、1.5 L自然吸氣發動機,峰值功率為150 kW的驅動電機和容量為50 Ah的動力電池組成,整車性能指標及相關部件的基本參數如表1所示。

表1 增程式混合動力汽車整車性能指標及相關部件的基本參數
1.2 整車仿真模型建立
為研究該增程式混合動力汽車控制策略的可行性和零部件參數選擇的合理性,本研究基于GT-SUITE軟件建立了該增程式混合動力汽車整車仿真模型,如圖1所示。仿真模型主要包括:駕駛員模型、整車動力學模型、再生制動系統模型、整車及動力系統控制策略模型、增程器模型、動力電池模型及電驅系統模型等。
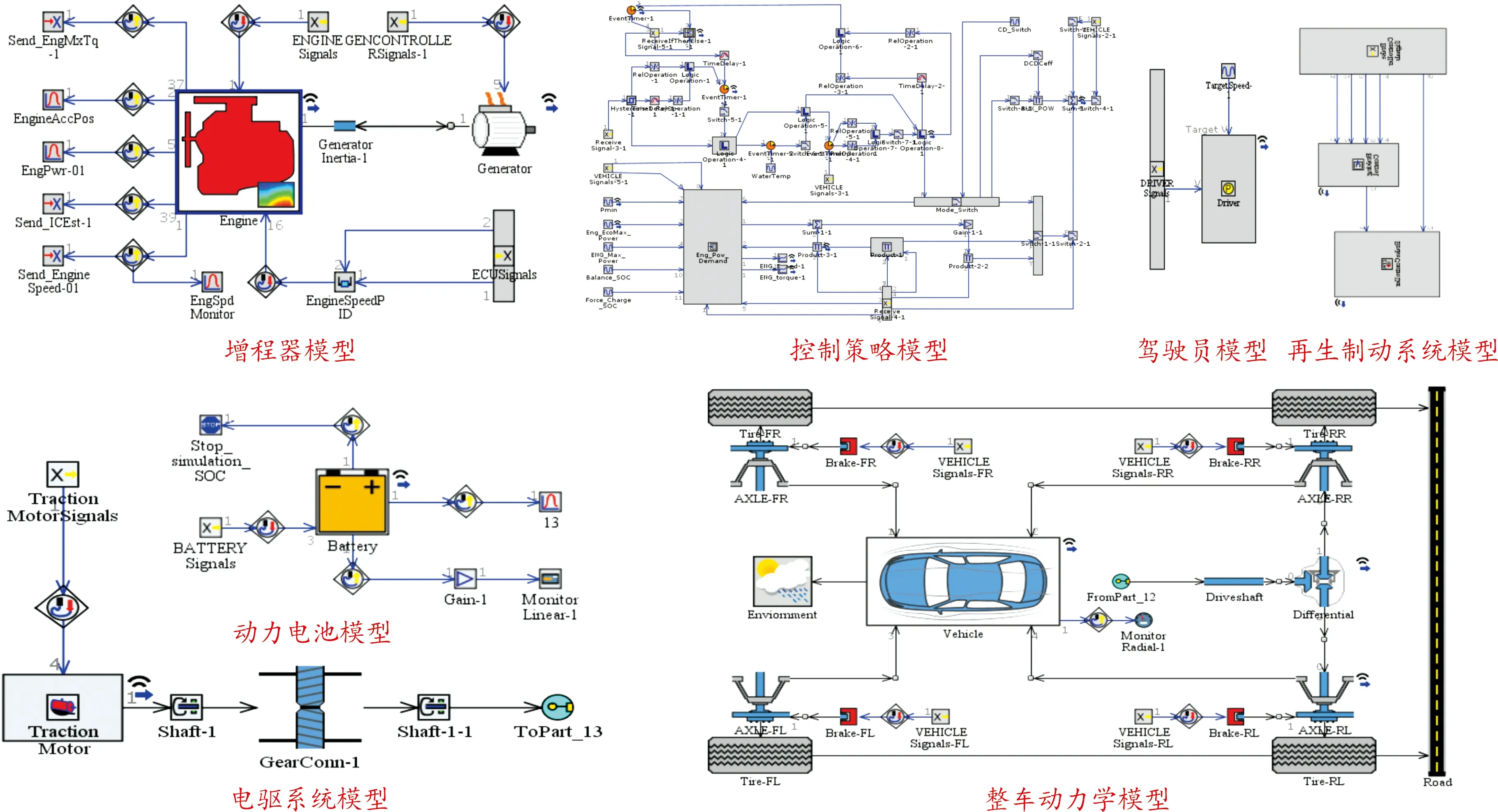
圖1 增程式混合動力汽車整車仿真模型
1.3 主要參數輸入
仿真模型中,需輸入各部件或系統準確的尺寸、性能等數據,以保證模型的準確性[15]。圖2為驅動電機效率MAP、圖3為發電機效率MAP、圖4為發動機萬有特性曲線。此外,汽車行駛工況的選擇能直接反映出車輛的整體性能。與NEDC行駛工況相比,WLTC工況更接近真實道路的行駛條件,無論是傳統的燃油車還是電動車,都更接近于真實道路上行駛時的燃油消耗和續航里程[16]。因此,本次仿真采用WLTC作為循環工況的輸入,如圖5所示。

圖2 驅動電機效率MAP

圖3 發電機效率MAP
1.4 純電模式下整車性能仿真
為了驗證驅動電機、動力電池等主要動力部件的參數是否滿足整車性能要求,以及搭建的模型是否可靠。可以通過純電模式下整車的動力性能指標進行驗證。
圖6為純電模式下整車加速性能仿真結果。由圖6可知,在純電模式下,車輛百公里加速時間為8.3 s,車輛可達到的最高車速為205 km/h。仿真結果符合車輛最高車速大于185 km/h、百公里加速時間小于9 s的動力性設計指標,說明電驅系統,動力電池、整備質量、滾阻系數等設計參數選擇合理,所搭建的模型具有較高的研究價值。
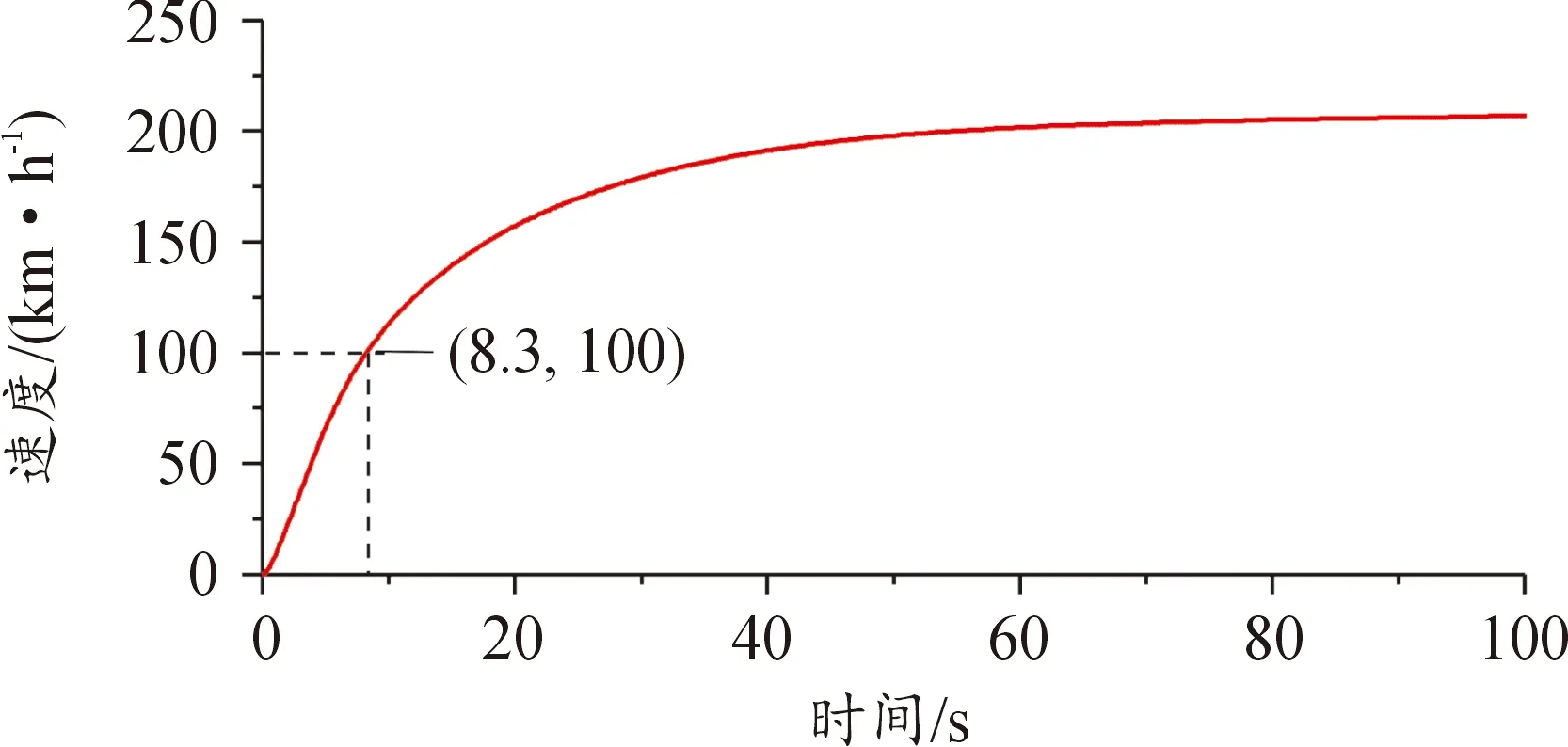
圖6 純電模式下整車加速性能仿真曲線
圖7為純電模式下電池SOC與行駛里程曲線。由圖7可知,在純電模式下,電池SOC值從95%下降到5%時,車輛在WLTC工況下行駛的里程數為96.05 km,滿足其相應行駛里程數大于90 km的設計要求,相關部件的參數選擇合理。
2 增程模式下整車控制策略制定
本研究從改善整車燃油經濟性的角度出發,在增程模式下,制定了發動機定點控制策略和功率跟隨控制策略,并利用仿真模型對比研究了2種控制策略下的整車油耗、發動機工況、電池SOC和功率等特性。
2.1 模式劃分策略
在整車控制策略中,根據加速踏板開度及當前電池SOC值,并結合發動機單次啟動時間t0及發動機水溫T判斷模式切換。當動力電池SOC小于所設定閾值下限時,整車以增程驅動模式運行;當動力電池SOC介于所設定閾值上下限之間時,整車根據上一時刻的狀態進行模式切換;當動力電池SOC高于所設定閾值上限時,整車根據上一時刻狀態、發動機單次啟動時間及發動機水溫進行模式切換。控制邏輯如圖8所示。
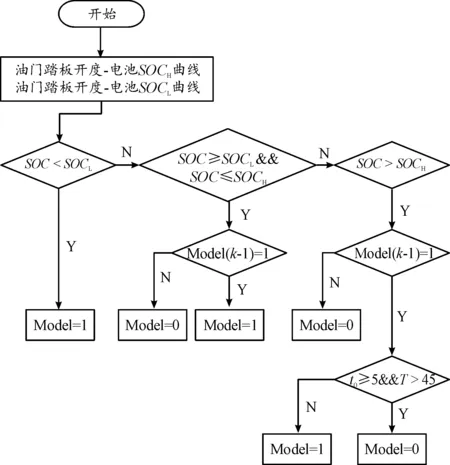
圖8 模式劃分策略控制邏輯框圖
SOCH和SOCL分別為電池SOC閾值上、下限。
2.2 功率跟隨控制策略
功率跟隨控制策略中,發動機根據動力電池的SOC值和驅動電機需求功率調整發動機工作點,從而輸出整車所需用的功率[17]。當電池SOC值大于所設定閾值的上限,并且驅動電機需求功率小于所設定的功率最小值時,發動機關閉;其余工作條件下,發動機開啟,車輛進入增程驅動模式,發動機根據驅動電機發出的功率需求信號輸出所對應的功率。這種控制策略可以優化動力電池的工作區間,但是由于發動機頻繁地切換轉速,會對車輛的NVH等性能產生不良影響,在設計中要考慮車輛的舒適性[18]。
在增程驅動模式下使用功率跟隨控制策略時,為了保證動力電池SOC處于平衡狀態,則要根據SOC附加某一功率值,該附加功率為:
(1)
式中:Kcha為充電功率系數。
根據動力母線上的整車需求功率PT、發電機效率ηgen以及附加功率Padd計算得到發動機需求功率為:
(2)
由式(2)可知,增程式混合動力汽車采用功率跟隨控制策略時,發動機功率將在一個較大的范圍內變化,為了提高發動機工作效率,發動機工作點須沿著最優工作曲線移動[19]。
2.3 定點控制策略
在定點控制策略下,將整車需求功率劃分在幾個不同的區域,每個區域設定了相對應的發動機工作轉速及輸出功率。當有功率需求時,根據驅動電機需求功率所在的范圍,發動機輸出恒定的功率提供給整車。當發動機輸出功率大于驅動電機需求功率時,多余的能量儲存到動力電池中,從而為動力電池補充電量。這種策略控制方法比較簡單且易于實現,發動機能夠工作在高效率區,且功率變化小,發動機效率比較高,電池SOC可以保持在平衡位置。因而,可以有效地延長動力電池的壽命、降低汽車的燃油消耗量[20]。
采用定點控制策略,則需要在發動機工作點需求基礎上,對發動機工作點再次調節,進而轉移至發動機所選定工作點。對于定點控制策略,發動機工作點的選擇會直接影響其輸出功率,工作點越多,多余的功率輸出會越少。但是過于繁多的工作點會使控制變得比較復雜,并且發動機工作點頻繁地切換會對車輛燃油經濟性產生不良后果[21]。在一般情況下,汽車爬陡坡或急加速的時間比較短。因此,動力電池可以短時間提供汽車因爬陡坡或急加速所需要的高功率。綜合考慮,在本文研究中選取5個工作點對發動機進行控制。
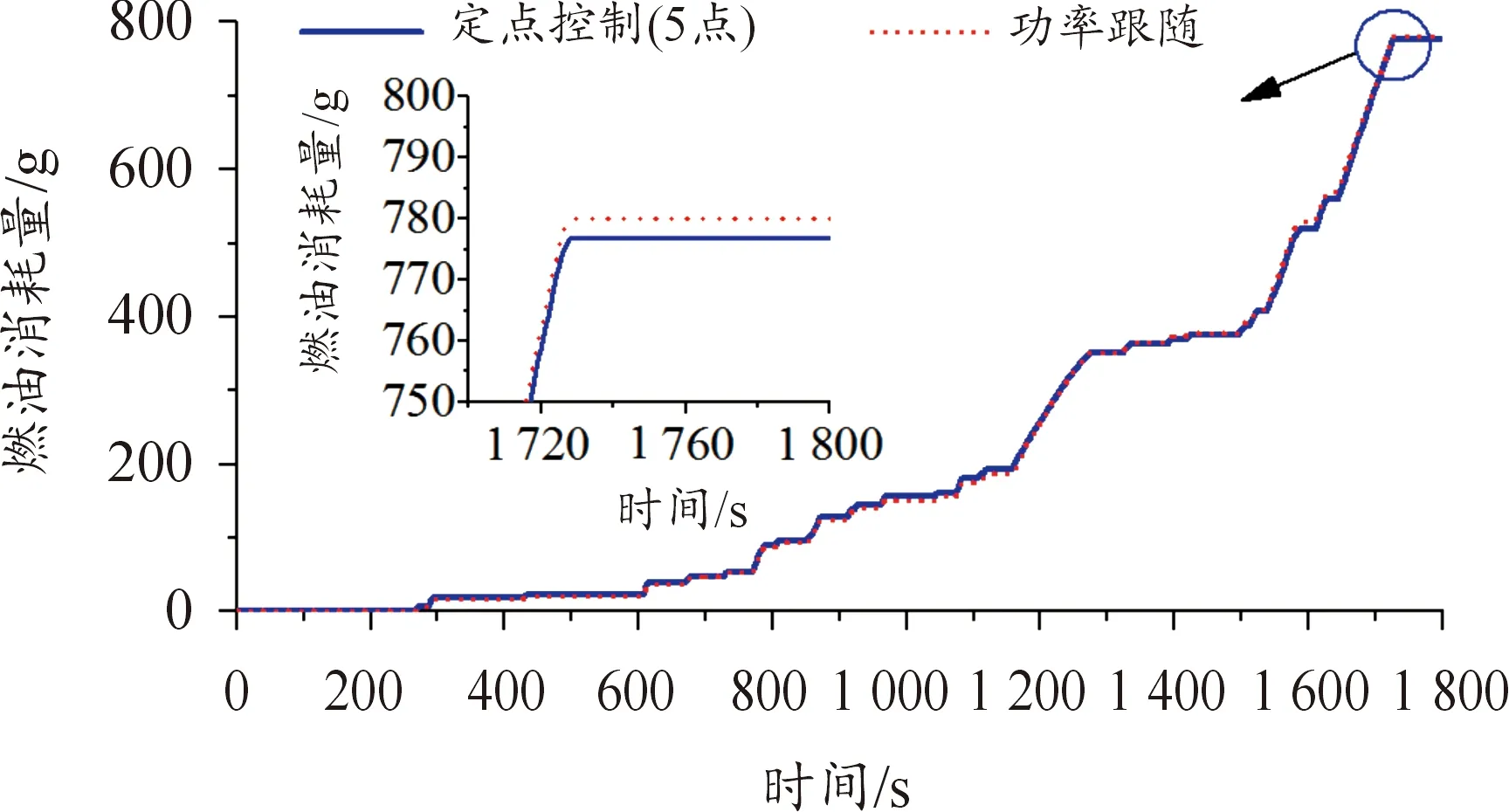
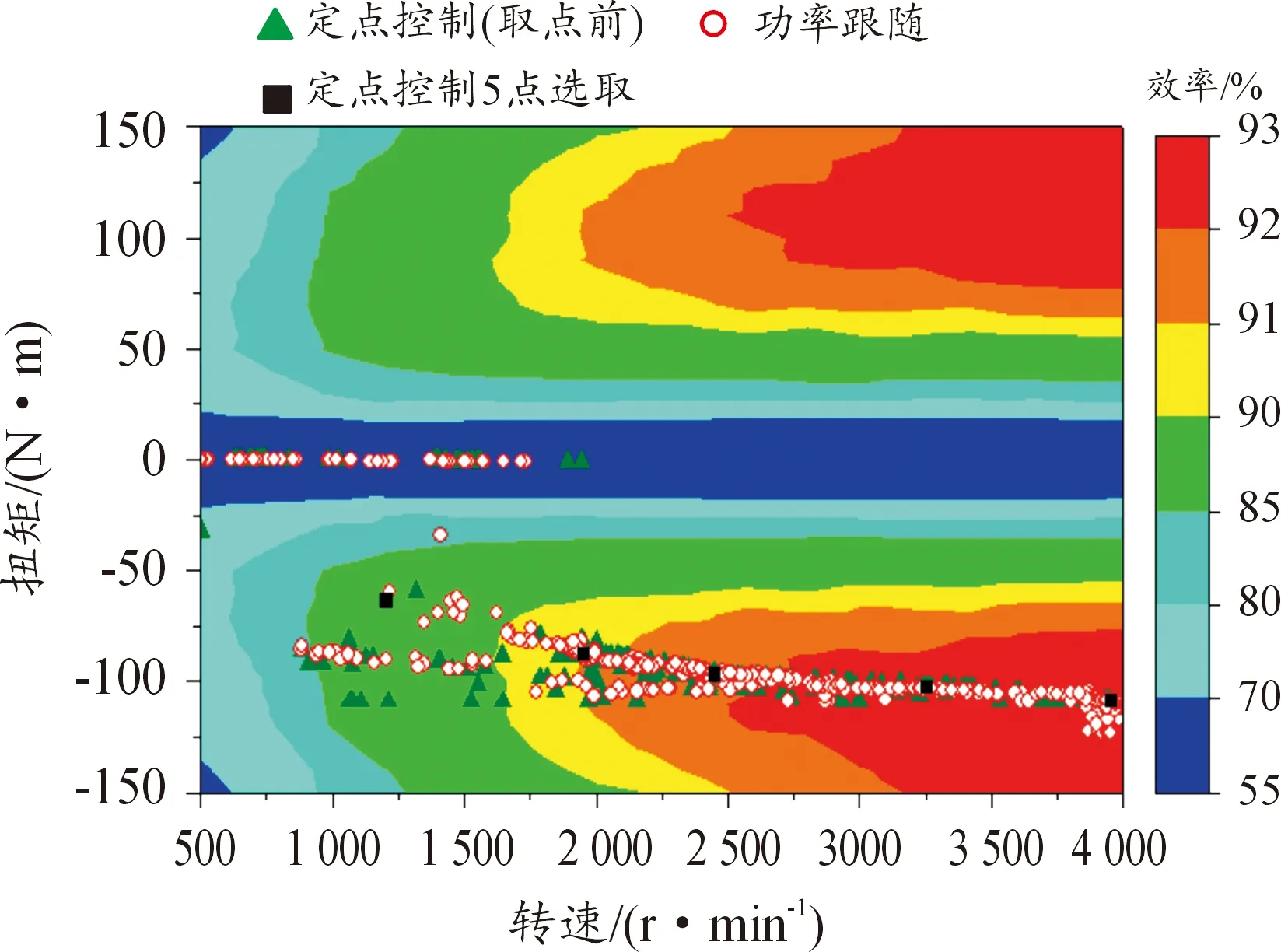
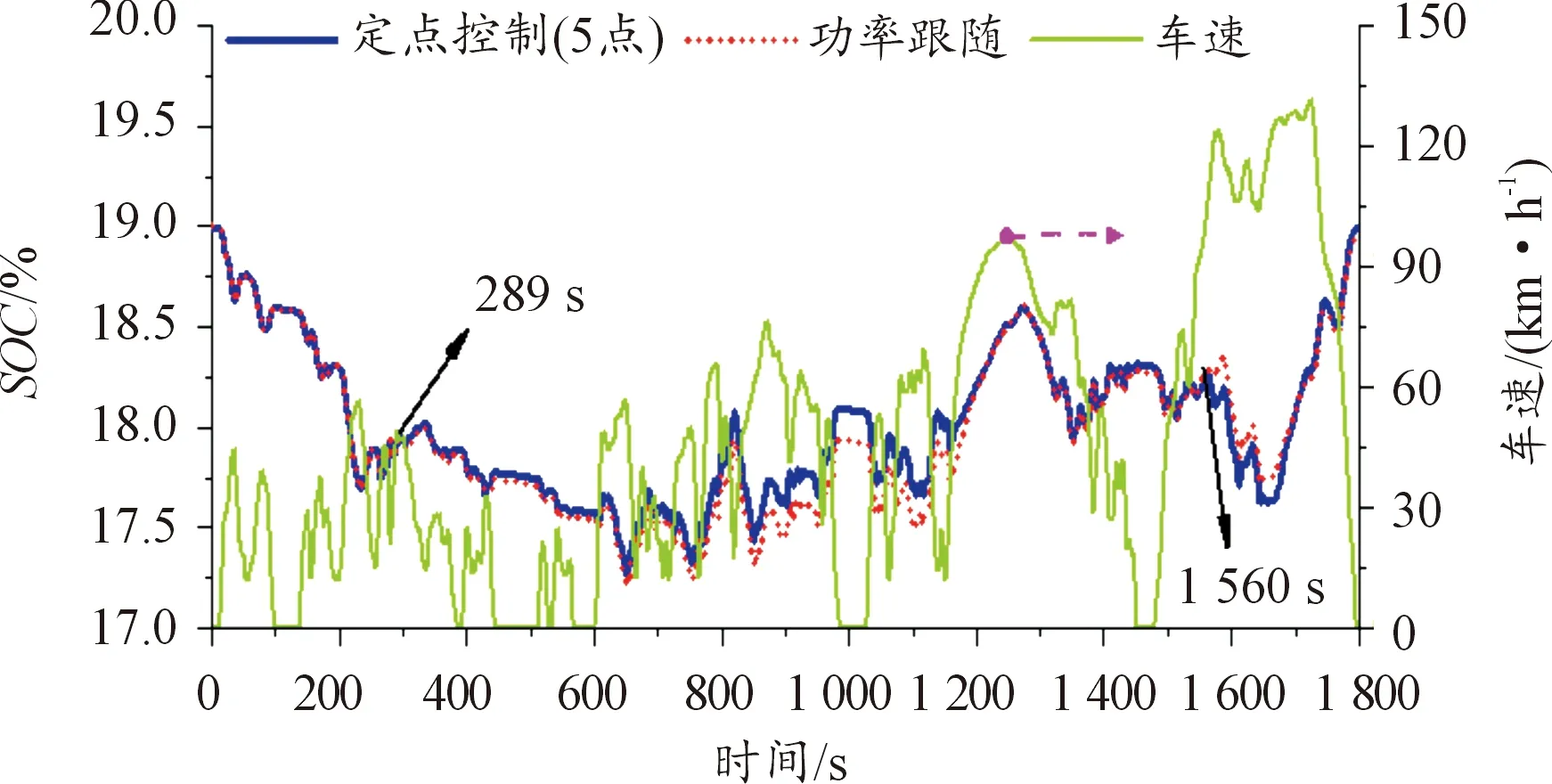
當驅動電機需求功率Preq 圖9 定點控制策略控制邏輯框圖 本文所制定的2種控制策略的區別是:功率跟隨控制策略發動機根據驅動電機的需求功率實時的輸出所對應的功率;定點控制策略是發動機根據驅動電機的需求功率,判斷該功率所在的區間,從而輸出恒定的功率。制定2種策略的目的是分析在WLTC工況時,電量保持模式(charge-sustaining,CS)下不同控制策略的策略響應,以及不同的控制策略對整車燃油經濟性及主要零部件的影響特性。 考慮到要為電量消耗模式(charge-depleting,CD)下SOC的閾值下限做預留處理,保證續航;另外為了避免因過度放電對電池造成損傷,將動力電池SOC初始值設置為19%,當動力電池SOC低于SOC閾值下限或者需求功率大于電池額定放電功率時,系統進入電量保持模式(charge-sustaining,CS)。 增程式混合動力汽車的優勢在于能有效減少燃油消耗量,從而可以提高燃油經濟性。所以整車的燃油經濟性是評價該車是否具有良好性能的重要指標之一[22]。 在WLTC工況下,車輛燃油消耗的體積和百公里燃油消耗量用以下公式計算: Vfuel=m/ρ (3) 式中:Vfuel為燃油體積(L);m為燃油消耗量(kg);ρ為燃油密度(kg/L)。 (4) 式中:V為百公里燃油消耗量(L);S為行駛距離(km)。 本研究中對控制策略參數的優化的策略是在保證電池終止SOC接近平衡值的情況下,降低整車燃油經濟性。 發動機采用功率跟隨策略時,式(1)中的充電功率系數對整車油耗和電池SOC有一定的影響。因此,為了降低整車的油耗以及電池終止SOC能夠達到平衡值,則需要對充電功率系數進行優化分析。圖10為充電功率系數對整車油耗和電池SOC的影響特性曲線。由圖10可知,電池終止SOC和油耗均隨著充電功率系數的增加而增加,在充電功率系數為0.085時,電池終止SOC達到平衡值19%,此時整車百公里油耗較低,具體為5.01 L。 圖10 充電功率系數對整車油耗和電池SOC的影響特性曲線 定點控制(5點)策略下,發動機輸出功率的選擇也會影響動力電池SOC和整車燃油經濟性,在本次研究中,分別研究了5組不同的發動機輸出功率對動力電池SOC和整車油耗的影響,如表2所示。 表2 發動機輸出功率對電池SOC和整車油耗仿真結果 由表2可知,采用第5組發動機輸出功率(Ppoints1~Ppoints5為8-18-25-35-45 kW)時的整車油耗最低、電池終止SOC最接近平衡值19%。 經過上述參數優化后的2種策略下整車燃油消耗量隨時間變化特性如圖11所示。由圖11可知,2種控制策略在WLTC工況下的燃油消耗量變化趨勢基本相同。定點控制(5點)和功率跟隨控制策略下燃油消耗量分別為776.9 g和780.1 g,通過式(3)和式(4),計算出定點控制(5點)和功率跟隨策略WLTC工況下百公里燃油消耗量分別為4.97 L和5.01 L。 圖11 整車燃油消耗量隨時間變化特性曲線 發動機作為增程式混合動力汽車的輔助動力單元,其工作特性直接影響整車性能。定點控制和功率跟隨2種控制策略下的發動機輸出功率變化、工作點分布分別如圖12和圖13所示。由圖12可知,在2種控制策略下,發動機輸出功率相差不大,在一個完整的WLTC工況下,定點控制(5點)策略發動機平均輸出功率為7.25 kW,功率跟隨控制策略發動機平均輸出功率為7.35 kW。由圖13可知,發動機OL線即為發動機最優工作曲線。功率跟隨策略發動機工作點沿著發動機最優工作曲線移動,但是并非所有的點都會沿著發動機最優工作曲線移動,有部分工作點變化范圍較大,可能會導致發動機效率降低。定點控制策略中,發動機工作點則不完全需要在最優工作曲線上移動,采用定點控制策略,則在發動機工作點需求基礎上,根據需求工作點的聚集程度進行選取,進而調整至發動機最優工作曲線,最后所選取的5個點均位于發動機最優工作線上,該策略能夠保證發動機工作在高效率區,從而降低油耗,提高整車燃油經濟性。定點控制(取點前)、定點控制(5點選取)和功率跟隨策略下的發動機熱效率分別為39.19%、39.42%和39.10%。 圖12 發動機輸出功率變化 圖13 發動機的工作點分布 發電機工作點分布如圖14所示。由圖14可知,定點控制和功率跟隨策略下發電機工作點的分布整體上差別不大,功率跟隨策略下的發電機工作點相對集中。總體上,定點控制(取點前)、定點控制(5點選取)和功率跟隨策略下的發電機效率分別為91.71%、91.82%和91.70%。 圖14 發電機工作點分布示意圖 電池SOC和功率變化曲線分別如圖15、圖16所示。由圖15和圖16可知,在低速區,車輛主要是以電池作為動力源為其提供動力,發動機參與度較少,2種策略的電池SOC變化趨勢一致。 圖15 電池SOC變化曲線 圖16 電池功率變化曲線 從289 s開始,定點控制(5點)策略電池SOC高于功率跟隨策略,主要原因是定點控制(5點)策略下的電池充電功率高于功率跟隨控制策略,說明定點控制(5點)策略在滿足車輛行駛所需的能量外,有多余的能量儲存到動力電池中,從而導致電池SOC升高;在中速以及高速區,定點控制(5點)策略的電池SOC值高于功率跟隨策略,主要是因為定點控制(5點)策略在能滿足驅動電機需求功率的前提下,有多余的電能儲存到動力電池中,導致SOC升高;在超高速區,從1 560 s時刻開始,定點控制(5點)策略電池SOC低于功率跟隨控制策略,原因可能是車輛處于急加速或者爬坡工況,驅動電機需求功率大于發動機輸出功率,此時發動機和動力電池協同工作,導致動力電池放電功率增大(見圖16),從而使電池SOC降低。在WLTC工況終止時,定點控制(5點)和功率跟隨策略下電池SOC值分別為18.99%和19%。 本文以某增程式混合動力汽車為研究對象,基于數據庫和部分零部件試驗結果,利用GT-SUITE軟件建立了增程式混合動力汽車仿真模型。從改善整車燃油經濟性的角度出發,制定了發動機定點控制(5點)策略和功率跟隨的能量管理控制策略,對功率跟隨中的充電功率系數、定點控制中的發動機輸出功率值進行了優化,然后對比分析了這2種策略下增程式混合動力汽車在WLTC工況下燃油經濟性的特性,并分析研究了2種控制策略下發動機工況及效能、電池SOC、電池輸出功率、發電機工作點及效能等特性,主要結論如下: 1) 通過優化,功率跟隨策略中的充電功率系數為0.085時,電池終止SOC達到平衡值19%,整車百公里油耗為5.01 L。定點控制(5點)策略中采用發動機輸出功率(Ppoint1~Ppoint5為8-18-25-35-45 kW)時的電池終止SOC為18.99%,整車百公里油耗為4.97 L。定點控制(5點)策略下整車百公里油耗滿足低于5.0 L的設計指標要求。 2) 采用定點控制(5點)策略使發動機能在最優工作線上工作,從而保證發動機工作在高效率區,提高了整車燃油經濟性。定點控制(5點)和功率跟隨策略下,發動機熱效率分別為39.42%和39.1%。 3) 定點控制(5點)和功率跟隨策略下發電機效率分別為91.82%和91.7%。
3 控制策略參數優化
3.1 功率跟隨策略充電功率系數優化

3.2 定點控制策略發動機輸出功率優化

4 控制策略對主要部件影響特性分析
4.1 發動機工作點對比分析


4.2 發電機工作點對比分析
4.3 電池SOC和功率對比分析

5 結論
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
時代英語·高三(2014年5期)2014-08-26 02:49:51