一種新型六自由度SCARA機器人設計與運動學分析
2022-10-17 12:56:22張良安王祥謝勝龍
包裝工程 2022年19期
張良安,王祥,謝勝龍
一種新型六自由度SCARA機器人設計與運動學分析
張良安1,王祥1,謝勝龍2
(1.安徽工業(yè)大學 機械工程學院,安徽 馬鞍山 243000;2.中國計量大學 機電工程學院,杭州 310018)
針對傳統(tǒng)四自由度SCARA機器人末端靈活性不足的問題,設計一種新型的六自由度SCARA機器人。首先在傳統(tǒng)四自由度SCARA機器人結(jié)構(gòu)特點分析的基礎上,通過改進其末端結(jié)構(gòu)以增加機器人的自由度,從而提高其末端的靈活性。然后分別采用D–H參數(shù)法與代數(shù)法建立該機器人的運動學正解模型與逆解模型。在此基礎上,采用對比法在Matlab的Robotics Toolbox工具箱中對該機器人開展仿真分析,驗證機器人運動學模型的正確性。最后,基于五次多項式插值算法對機器人開展軌跡規(guī)劃研究。實驗結(jié)果顯示該機器人的運動軌跡、速度與加速度曲線光滑連續(xù),沒有任何斷點與突變點。表明該機器人運動平穩(wěn),具有良好的運動學性能,從而為后續(xù)該機器人的運動控制奠定了良好的基礎。
SCARA機器人;D–H參數(shù)法;機器人運動學;五次多項式插值;軌跡規(guī)劃
機器人技術已經(jīng)在3C行業(yè)、食品包裝、汽車制造、噴砂打磨以及金屬加工等行業(yè)中廣泛運用[1]。采用工業(yè)機器人代替人工進行繁重的工作,不僅可以提高生產(chǎn)效率,節(jié)省人力資源,還可以滿足可靠性的要求,進而保證了質(zhì)量。SCARA(Selective Compliance Assembly Robot Arm)機器人不僅有較好的靈活性和很高的剛性[2],還具有速度快、定位精度高、柔性好等特點,適用于自動化裝配、碼垛搬運等,適合工廠自動化生產(chǎn),因此市場對其需求量越來越大[3]。
為了進一步提高生產(chǎn)效率,學術界對SCARA機器人開展了大量的研究,希望能提升其性能。王鵬等[4]為了避免在SCARA機器人工作過程中出現(xiàn)的運動耦合現(xiàn)象,改進了傳統(tǒng)SCARA機器人的腕部結(jié)構(gòu),并且降低了運動控制的難度。林恒等[5]將SCARA的關鍵部件高度集成,簡化整體機構(gòu),使整體重心降低,進而改善小臂受力狀況。湯智先等[6]對SCARA機械臂的結(jié)構(gòu)進行分析,通過改變底座幾何結(jié)構(gòu)減小振動的產(chǎn)生。裴永超等[7]設計了一種直驅(qū)式SCARA機器人,采用力矩電機直接驅(qū)動各個關節(jié),使得結(jié)構(gòu)更加緊湊。王海峰等[8]對SCARA機器人進行傳動方案優(yōu)化及機械結(jié)構(gòu)設計。Bruzzone等[9]利用旋轉(zhuǎn)關節(jié)驅(qū)動平行四邊形機構(gòu)的方式代替了移動關節(jié),從而通過簡單的平行四邊形機構(gòu)取代了絲杠軸與花鍵軸等零件的使用。楊梅等[10]為了完成焊接過程中的靈活操作,提出了一種新型SCARA機器人,該機器人通過增加擺動機構(gòu),擴大了SCARA的適用范圍。曹峰等[11]提出了一種五自由度的SCARA機器人,在SCARA機器人基礎上引入第四、第五雙自由功能端,使得機器人具備了多樣化功能,獲得了更高的整體兼容性。Urrea等[12]將SCARA機器人增加了旋轉(zhuǎn)和夾持的2個自由度夾爪以提高生產(chǎn)效率。劉凱等[13]提出一種新型工業(yè)機器人結(jié)構(gòu),增加了機器人的運動空間。
在一些復雜的工況環(huán)境中,上述研究都存在一定的弊端,如自由度不足、控制難度大、制造難度大、成本較高等。例如傳統(tǒng)SCARA機器人只適用于平面定位和垂直方向的裝配工作,在一些涂膠噴漆等高難度復雜工況的行業(yè)因其自由度的局限而受到約束,必須選擇成本更高的六軸機器人。文中針對上述的問題與不足,解決傳統(tǒng)SCARA機器人的不足和六自由度串聯(lián)機器人的局限問題,在傳統(tǒng)四自由度SCARA機器人結(jié)構(gòu)的基礎上,增加2個自由度以提高機構(gòu)的靈活性和工作空間,使機器人可以更好地完成一些復雜的任務,以滿足多領域的使用需求。
1 六自由度SCARA機器人機構(gòu)設計
目前常見的SCARA機器人主要為四自由度或者末端加裝一些可運動的夾爪來提高其靈活性。文中提出一種簡易的模塊化結(jié)構(gòu)增加機器人本體的2個自由度,進而提高機器人的靈活性。
1.1 機器人方案概述
在對傳統(tǒng)四自由度SCARA機器人的結(jié)構(gòu)進行總結(jié)分析的基礎上,為了達到增加機器人的靈巧性與結(jié)構(gòu)緊湊的目的,確定新型六自由度SCARA機器人的設計原則如下。
1)在第1關節(jié)處,底座選用中空結(jié)構(gòu),伺服電機通過電機連接板與諧波減速器進行連接,然后減速器與安裝法蘭連接,最后安裝法蘭固定于底座上,實現(xiàn)電機安裝在底座內(nèi)部。這種結(jié)構(gòu)有利于底座的平衡,使得大臂結(jié)構(gòu)更加簡潔,并在底座與大臂上安裝限位裝置,進行機械限位。
2)第2關節(jié)處,伺服電機安裝在小臂上,其傳動機構(gòu)與第1關節(jié)處相似,雖然相對于電機安裝在大臂上會增加轉(zhuǎn)動慣量,但這種設計會使得整體結(jié)構(gòu)變得簡單,安裝方便。從而提升了小臂的移動速度與靈敏度,降低了小臂對電機的驅(qū)動要求。
3)第3、4關節(jié)處,伺服電機同樣安裝在小臂上,通過同步帶輪分別驅(qū)動絲杠軸與花鍵軸的運動,相較于將伺服電機安裝在絲杠軸與花鍵軸機構(gòu)末端,降低了機器人的重心。絲杠軸通過連接橋與花鍵軸連接,完成腕部的移動與轉(zhuǎn)動。因花鍵軸末端增加了機構(gòu),為保證垂直方向的剛性,需加裝2個絲杠導向軸。
4)第5關節(jié)處為腕部的擺動。此處相對于傳統(tǒng)SCARA機器人,為增加靈活度而新增的機構(gòu)。將伺服電機水平放置,其電機輸出軸與花鍵軸垂直,通過安裝座將電機固定于花鍵軸末端,通過同步帶輪帶動第6關節(jié)處電機安裝板進行擺動,實現(xiàn)末端工具的上下擺動,使得SCARA機器人可以完成不僅限于平面的工作任務,其結(jié)構(gòu)見圖1。
5)第6關節(jié)的運動為末端工具的轉(zhuǎn)動,與第4、5關節(jié)配合可以進行末端工具的姿態(tài)調(diào)整。電機安裝在第5關節(jié)帶動轉(zhuǎn)動的電機安裝板內(nèi),使得結(jié)構(gòu)緊湊且安裝與加工較為容易。而且運動與控制較為簡單,有效確保運動平衡,降低負載,其結(jié)構(gòu)見圖2。
6)底座、大臂和小臂均采用Q235材料,使整個機器人的質(zhì)量往底座方向后移,保證機器人的剛性與穩(wěn)定性。五軸和六軸電機的安裝座和安裝板采用6061–T6材料進行加工,可以減輕末端質(zhì)量和電機負載。
1.2 機器人虛擬樣機設計
結(jié)合上述設計原則,基于SolidWorks軟件對六自由度SCARA機器人進行三維建模,其總體結(jié)構(gòu)見圖3。所設計的六自由度SCARA機器人主要參數(shù)見表1。
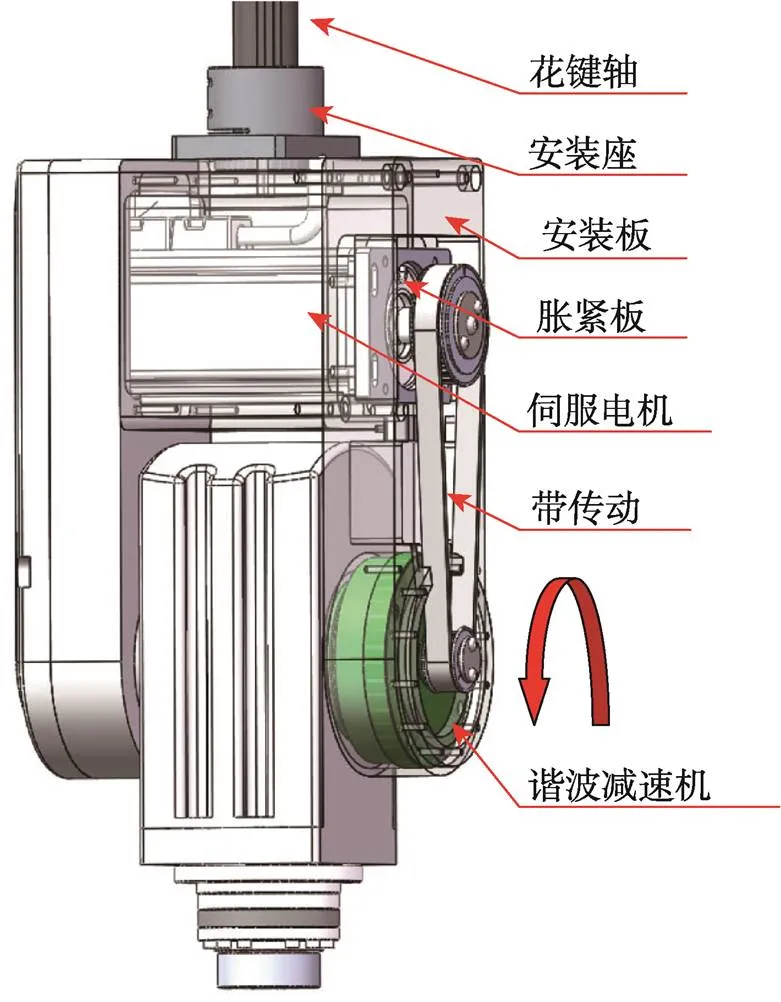
圖1 第5關節(jié)處機構(gòu)
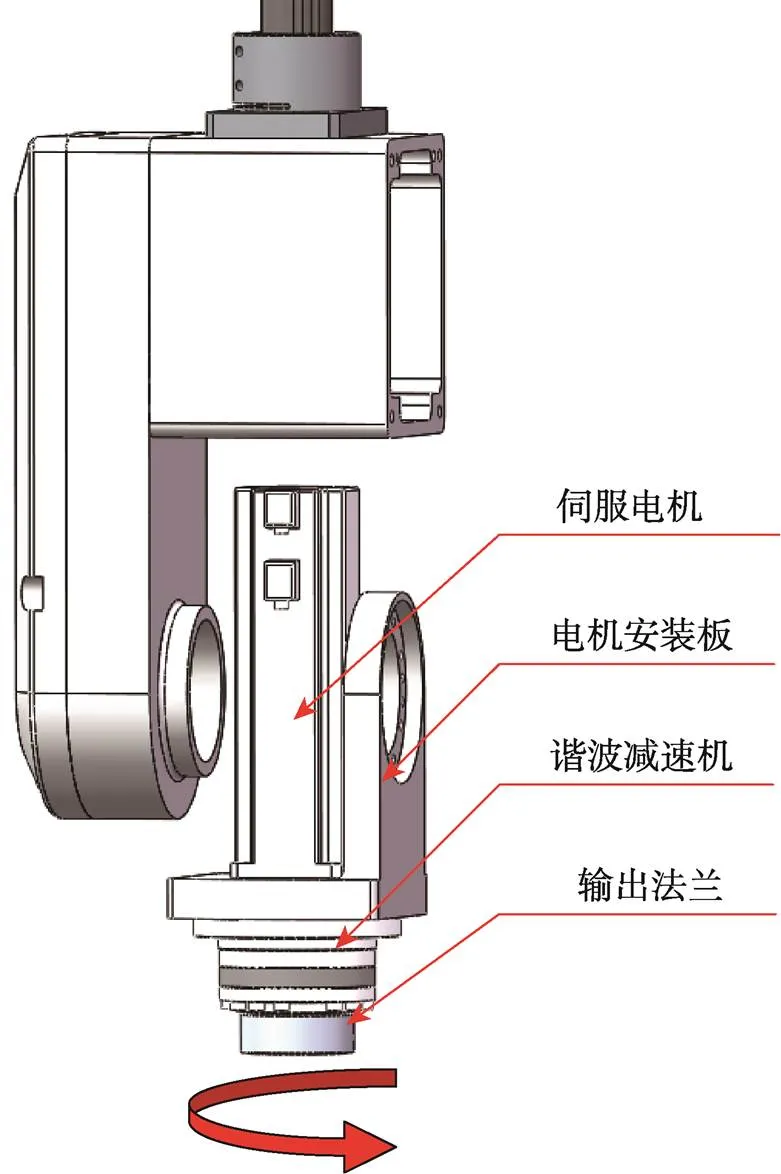
圖2 第6關節(jié)處機構(gòu)
該新型六自由度SCARA機器人工作空間的俯視圖見圖4。圖4展示了該機器人的大臂轉(zhuǎn)動與小臂轉(zhuǎn)動所形成的工作空間的平面圖。由于在該俯視圖中新增的機構(gòu)被遮擋無法展示,故在圖5中展示新增機構(gòu)的工作空間。
在圖5中,當前三軸都固定不動時,傳統(tǒng)四軸SCARA機器人末端只能實現(xiàn)相對于平面的旋轉(zhuǎn),即以4為圓心的灰色平面區(qū)域的圓。文中提出的六自由度SCARA機器人,在此基礎上還有腕部的擺動,即圖5中以5為圓心相交最大圓的橢圓區(qū)域(4與5重合),其運動范圍為兩處6所構(gòu)成的弧段。此外,圖5中2個最小橢圓代表第6關節(jié)即末端的轉(zhuǎn)動,其轉(zhuǎn)動角度范圍為最小橢圓其內(nèi)部區(qū)域。

1.機箱底座;2.伺服電機;3.諧波減速器;4.大臂;5.小臂;6.伺服電機;7.伺服電機;8.伺服電機;9.絲杠主軸;10.連接橋;11.花鍵;12.同步帶輪;13.伺服電機;14.同步帶輪;15.伺服電機。
表1 六自由度SCARA機器人主要參數(shù)
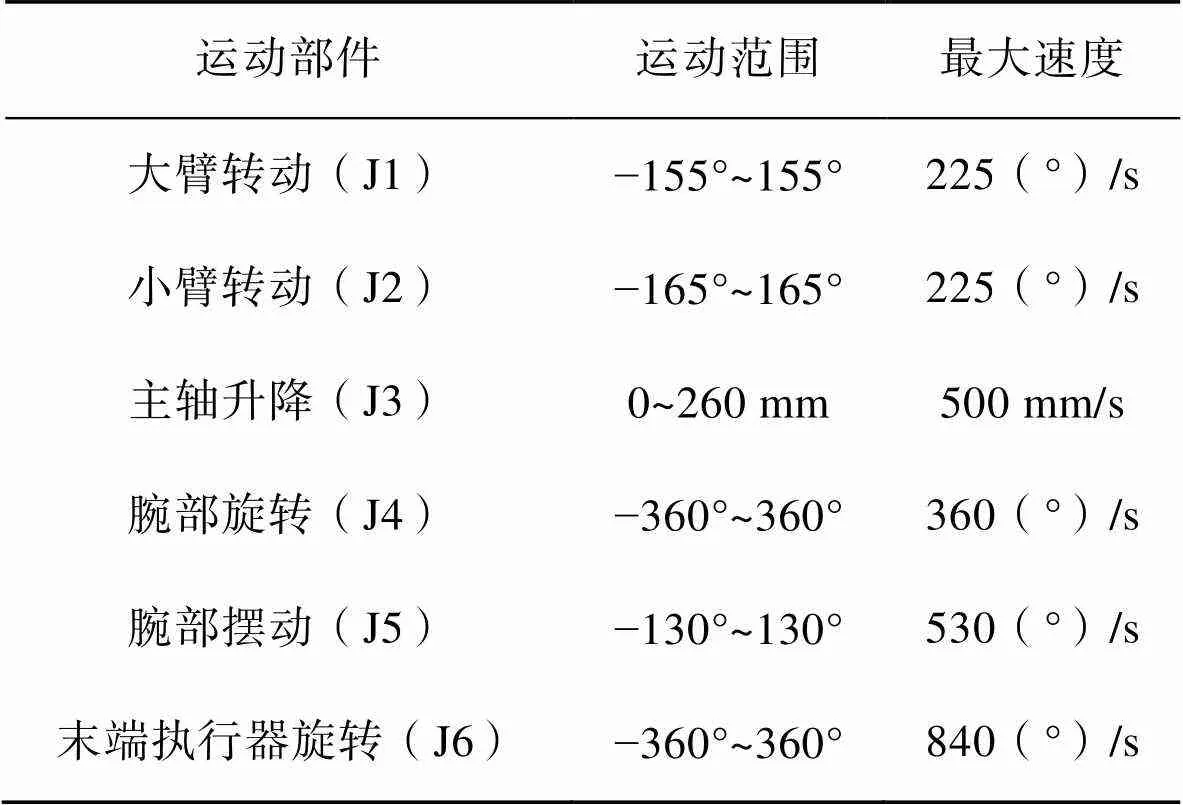
Tab.1 Main parameters of 6-DOF SCARA robot
由于該新型機器人在傳統(tǒng)的四自由度SCARA機器人的末端增加了2個自由度,因此不僅增加了機器人的運動空間,末端還可以通過加裝工具來提升機器人的靈巧性與適應性。此外,由于該新增的機構(gòu)中大多數(shù)零件均采用標準件,只有少數(shù)固定安裝板需要設計,因此具有制造簡單、通用性強、成本低廉等優(yōu)點。
2 六自由度SCARA機器人運動學研究
2.1 機器人正運動學模型
機器人的正運動學是為了解決機器人的末端位置求解問題[14]。建立如圖6所示的D–H坐標[15],機器人的機構(gòu)運動簡圖見圖7。
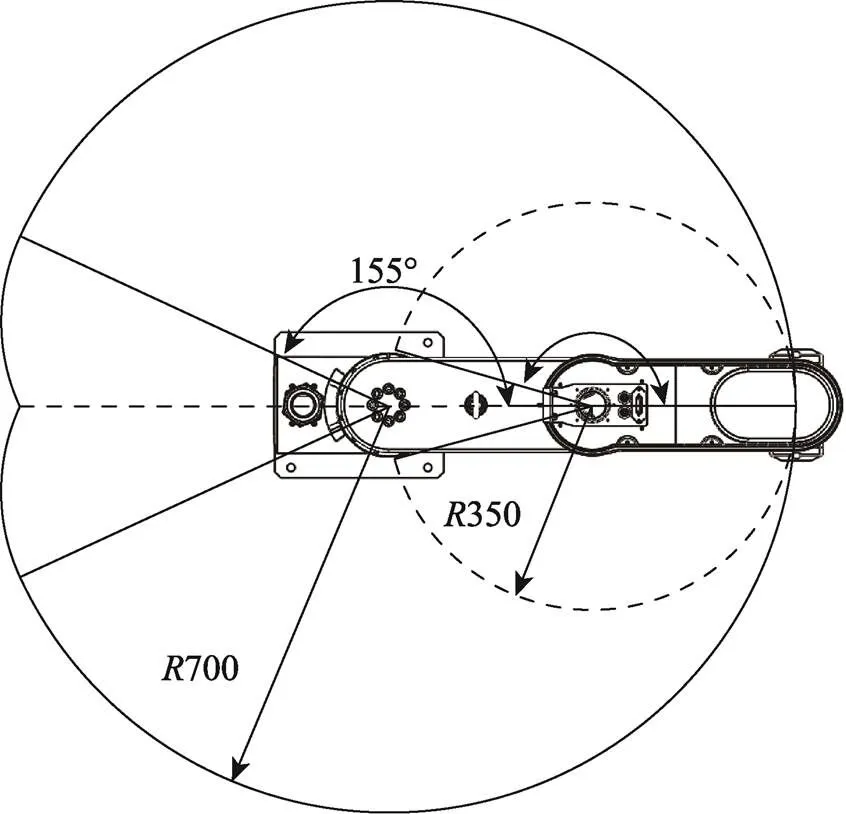
圖4 六自由度SCARA機器人工作空間
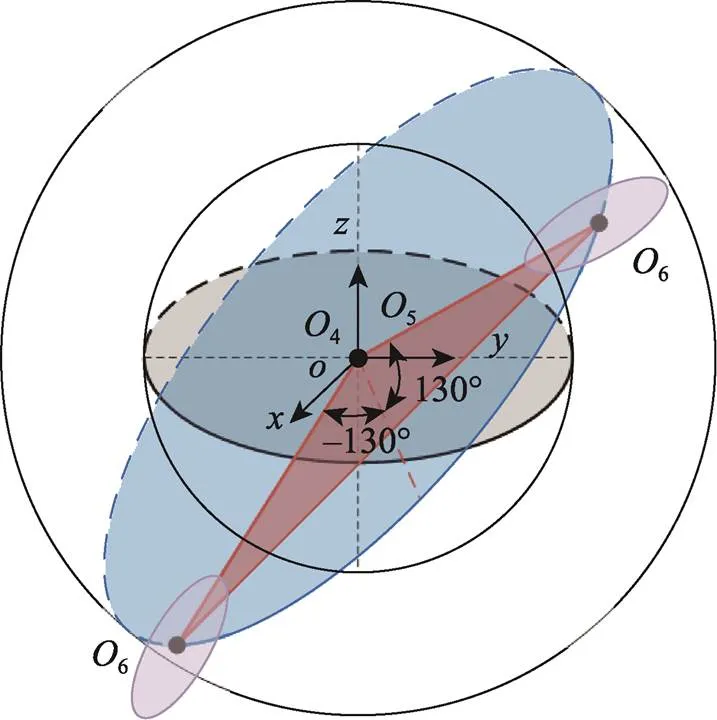
圖5 六自由度SCARA機器人末端空間
列出該機器人的D–H參數(shù)見表2。
表2 D–H參數(shù)
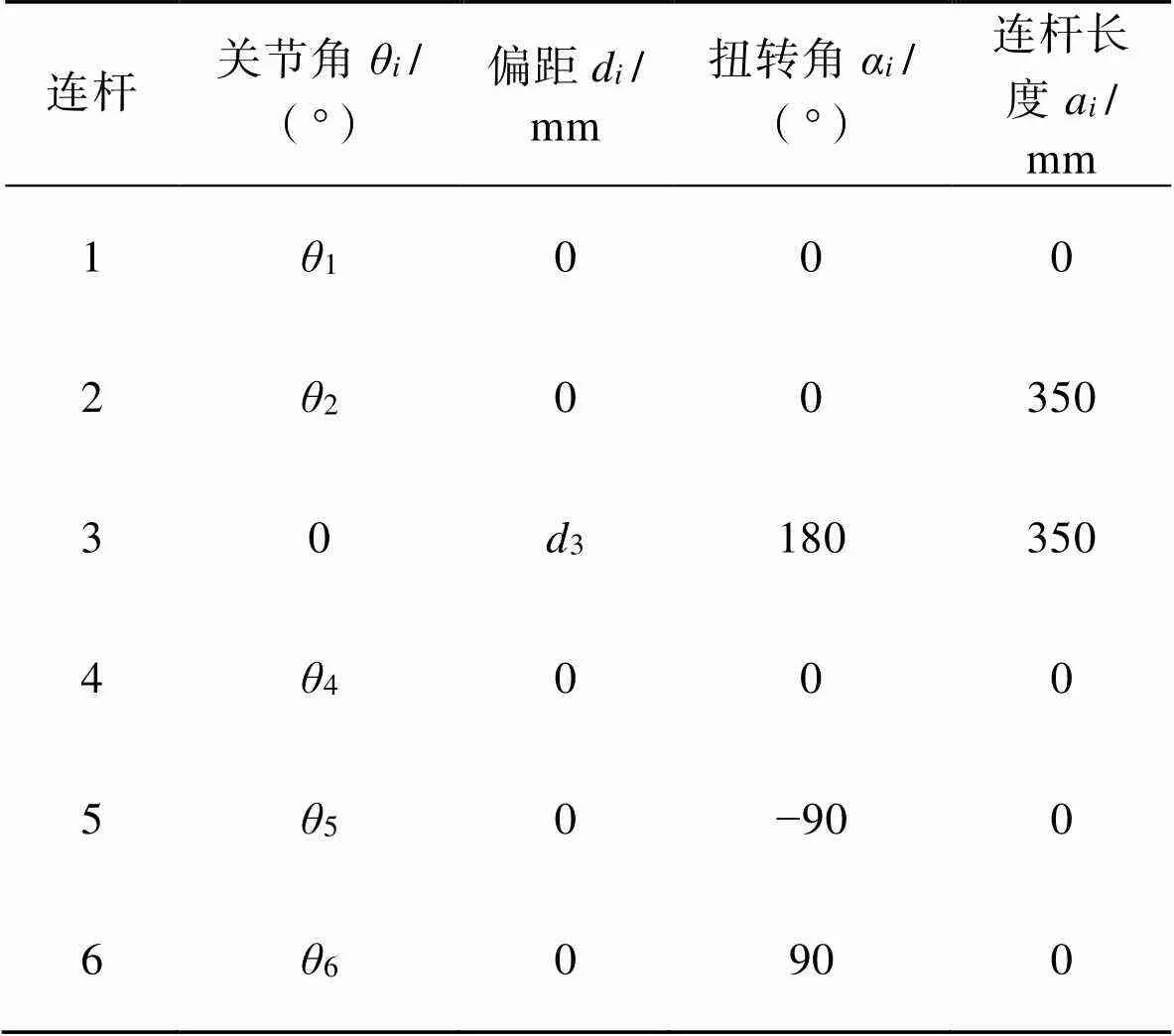
Tab.2 DH parameters
已知關節(jié)軸的轉(zhuǎn)角,通過運動學正解,即可求解末端姿態(tài)和位置,根據(jù)D–H坐標系與D–H參數(shù)表求得各連桿變換矩陣為:
(1)
式中:表示sin;表示cos。
運動學正解為:
(2)
式中:s表示sin;c表示cos。
提前計算年終獎個稅,合理避稅。各公司在發(fā)放年終獎時,建議合理安排好金額,適當注意避開個稅稅率中的幾個“盲區(qū)”,計算稅后收入,避免出現(xiàn)“企業(yè)多給,員工少拿”的尷尬。
圖6 D–H坐標系建立示意圖
Fig.6 Diagram for construction of coordinate system
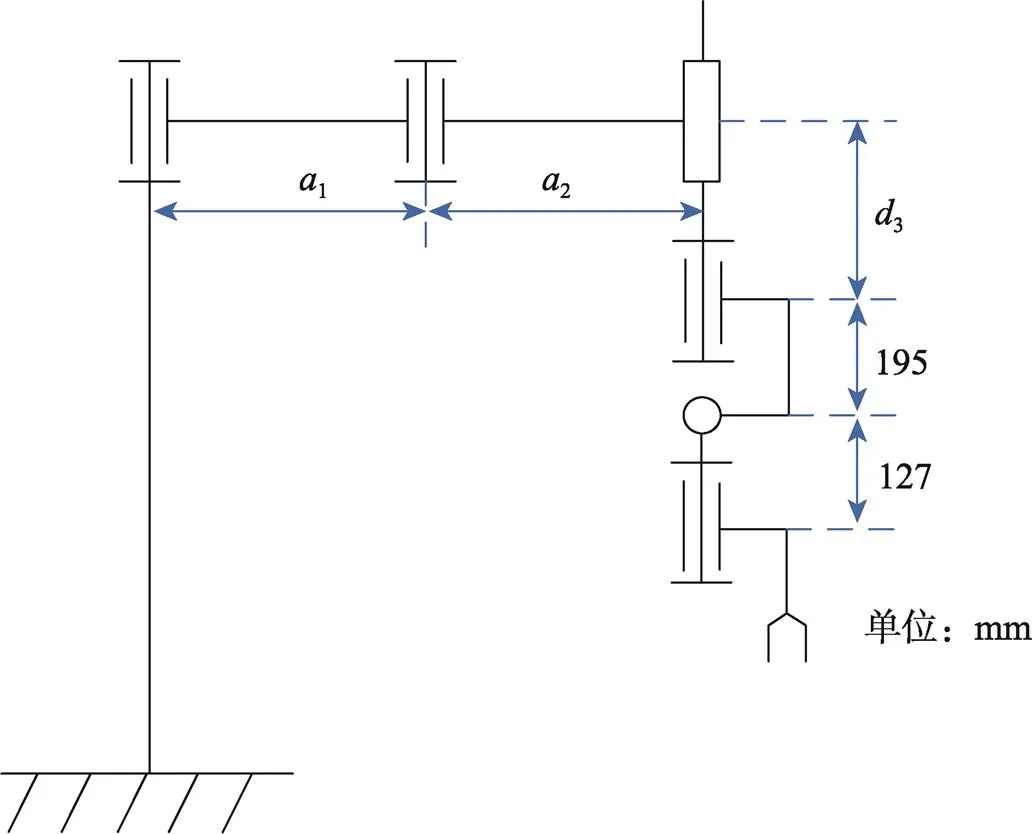
圖7 機構(gòu)運動簡圖
2.2 機器人逆運動學模型
利用代數(shù)法對六自由度SCARA機器人進行求解運動學逆解,可得到:
(3)
(4)
(5)
(6)
(7)
(8)
式中:表示sin;表示cos。
2.3 機器人運動學的驗證
機器人運動學模型的驗證包括正運動學模型的驗證與逆運動學模型的驗證,可以采用對比法進行比較驗證。采用對比法對六自由度SCARA機器人正運動學模型的正確性進行驗證時,給定各關節(jié)軸轉(zhuǎn)動的角度值和移動的距離值分別為1=π/2、2=?π/3、3=0.15、4=π/3,5=π/6、6=?π/4,代入六自由度SCARA機器人末端執(zhí)行器的位置和方程矩陣,再將同樣的值代入Matlab的Robotic Toolbox中,并利用fkine函數(shù)進行求解。2次計算的結(jié)果一致,其結(jié)果為:
(9)
對比了2種方法計算出來的結(jié)果是一致的,因此可以驗證其正運動學模型的正確。
采用對比法對六自由度SCARA機器人逆運動學模型的正確性進行驗證時,將式(9)代入六自由度SCARA機器人逆運動學模型中,求解出其各個關節(jié)轉(zhuǎn)動值和移動的距離值,然后將式(9)代入Matlab的Robotic Toolbox中,并利用ikine函數(shù)進行求解。2種方法解得的計算結(jié)果對比見表3。
表3 計算結(jié)果與仿真結(jié)果對比

Tab.3 Results of calculation and simulation
在表3中,仿真結(jié)果一欄為利用ikine函數(shù)進行求解得到的結(jié)果,因逆運動學方程存在多解的問題,所以計算1—4分別對應上述逆運動學方程計算出來的結(jié)果。對比得出,在計算1—4的多組解中有1組解,即計算4的解與仿真所得的逆運動學解一致,證明了文中所計算的六自由度SCARA機器人的逆運動學方程的正確性。
3 機器人關節(jié)空間的軌跡規(guī)劃
3.1 五次多項式插值算法的軌跡規(guī)劃
在進行機器人的軌跡規(guī)劃時,除了給定該段軌跡的開始點位置與速度,結(jié)束點位置與速度這4個約束條件外,若再給定該段軌跡開始點與結(jié)束點的加速度,則約束條件會從4個增加到6個。此時三次多項式將無法滿足插值的精度需求,為了完成機器人這種復雜軌跡規(guī)劃的插值任務,需要采用式(10)的五次多項式來進行軌跡規(guī)劃。
(10)
式中:0、1、2、3、4、5為系數(shù);為時間;為各關節(jié)的位移。
由邊界約束條件解得系數(shù)為:
(11)
式中:0為起始位移;f為終止位移;為起始速度;為終止速度;為起始加速度;為終止加速度;f為終止時間。
3.2 實驗仿真與分析
在機器人各個關節(jié)活動范圍內(nèi),設定各關節(jié)運動的起始點與終止點的角度取值見表4,其中設定運動時間。
表4 關節(jié)角度的起始點與終止點
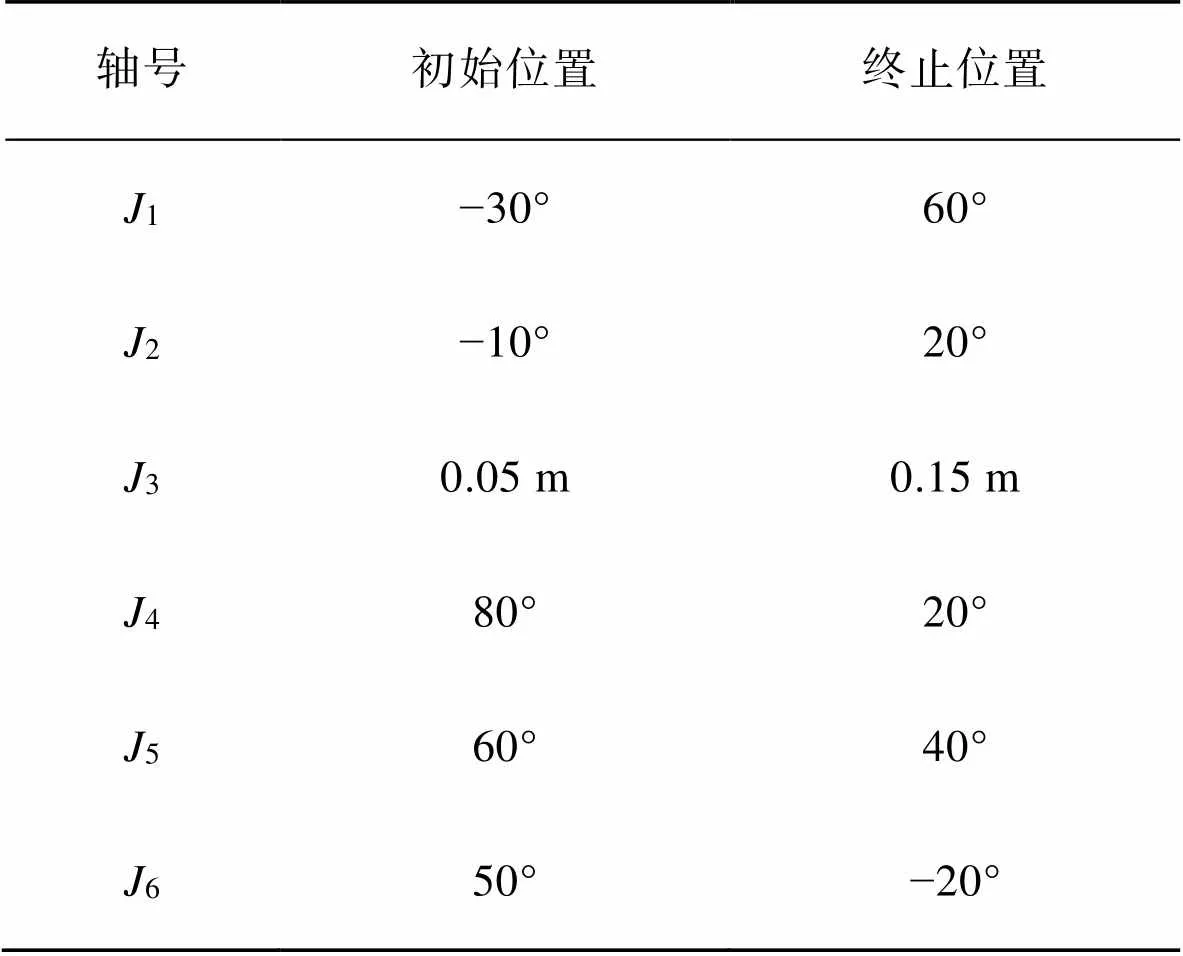
Tab.4 Starting and ending points of joint angles
計算得到各關節(jié)五次多項式插值算法的軌跡規(guī)劃方程的系數(shù)見表5。
設定運動軌跡的起始與結(jié)束的速度均為0,在采用關節(jié)空間下的五次多項式進行軌跡規(guī)劃時,各個關節(jié)運動的路徑、速度以及加速度情況見圖8。
圖8的結(jié)果表明,所設計的六軸SCARA機器人各關節(jié)的位移、速度和加速度曲線都較為平滑且連續(xù),未出現(xiàn)突變的情況,因此運動時電機不會出現(xiàn)抖動的情況,從而保證了該機器人運動的平穩(wěn)性。
表5 五次多項式各系數(shù)
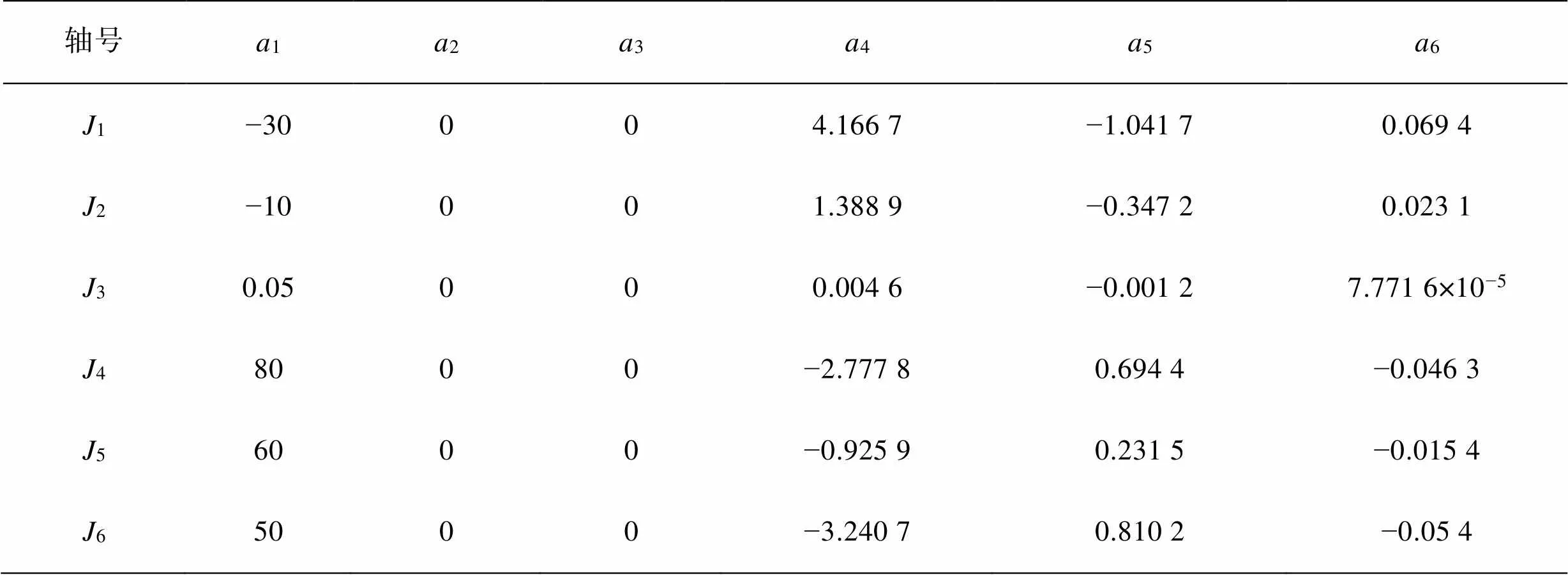
Tab.5 Coefficient of quintic polynomials
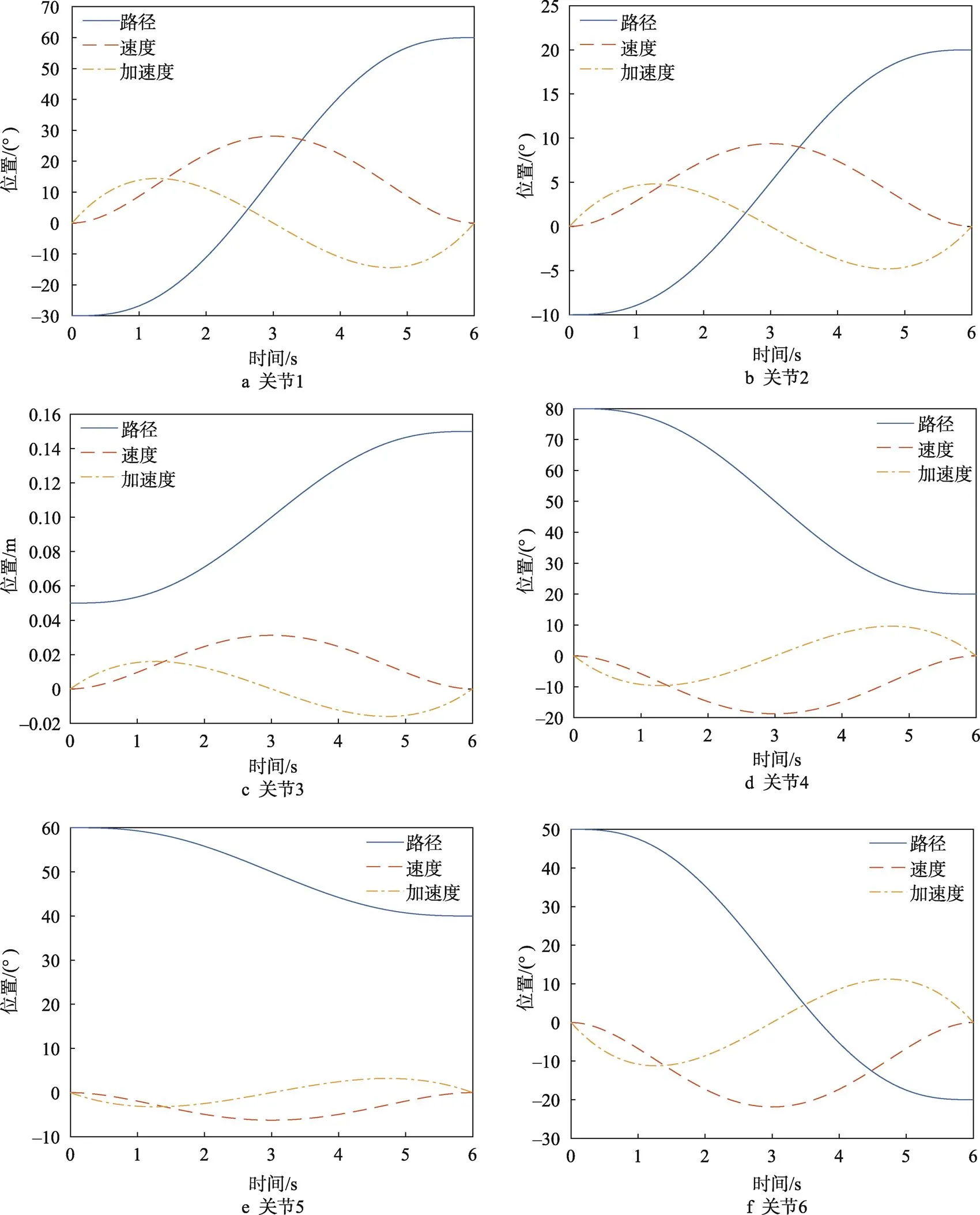
圖8 五次插值各關節(jié)運動軌跡
4 結(jié)語
針對傳統(tǒng)四自由度SCARA機器人末端靈活性不足的問題,改進其末端結(jié)構(gòu)提高了機器人末端的靈活性。基于D–H參數(shù)法與代數(shù)法建立了該機器人的運動學模型并進行了仿真驗證。通過開展軌跡規(guī)劃研究,驗證了機器人運動的平穩(wěn)性,為樣機的制造與控制奠定了良好的基礎。
[1] 陳春春. 工業(yè)機器人產(chǎn)業(yè): 現(xiàn)狀、產(chǎn)業(yè)鏈及發(fā)展模式分析[J]. 互聯(lián)網(wǎng)經(jīng)濟, 2019(1): 32-37.
CHEN Chun-chun. Robot Industry: Analysis of Present Situation, Industrial Chain and Development Model[J]. The Internet Economy, 2019(1): 32-37.
[2] 劉煬, 楊樂. SCARA機器人運動學和動力學仿真[J]. 現(xiàn)代機械, 2020(5): 15-19.
LIU Yang, YANG Le. Kinematic and Dynamic Simulation of SCARA Robot[J]. Modern Machinery, 2020(5): 15-19.
[3] 楊明, 張如昊, 張軍, 等. SCARA四軸機器人控制系統(tǒng)綜述[J]. 電氣傳動, 2020, 50(1): 14-23.
YANG Ming, ZHANG Ru-hao, ZHANG Jun, et al. Review of SCARA Four Axis Robot Control System[J]. Electric Drive, 2020, 50(1): 14-23.
[4] 王鵬, 張良安, 單家正. SCARA機器人結(jié)構(gòu)改進與仿真分析[J]. 現(xiàn)代制造工程, 2015(12): 23-27.
WANG Peng, ZHANG Liang-an, SHAN Jia-zheng. Mechanical Structure Improvement and Simulation Analysis of SCARA Robot[J]. Modern Manufacturing Engineering, 2015(12): 23-27.
[5] 林恒, 談士力, 陳凱, 等. 基于模塊化的SCARA機器人結(jié)構(gòu)設計與優(yōu)化[J]. 工業(yè)控制計算機, 2015, 28(3): 47-48.
LIN Heng, TAN Shi-li, CHEN Kai, et al. Structure Design and Optimization of SCARA Robot Based on Modularization[J]. Industrial Control Computer, 2015, 28(3): 47-48.
[6] 湯智先, 潘穎. SCARA機械臂的仿真振動分析及振動測試[J]. 制造業(yè)自動化, 2020, 42(6): 21-26.
TANG Zhi-xian, PAN Ying. Simulation Vibration Analysis and Vibration Test of SCARA Manipulator[J]. Manufacturing Automation, 2020, 42(6): 21-26.
[7] 裴永超, 劉吉柱, 楊智涵, 等. 直驅(qū)式SCARA的結(jié)構(gòu)設計和優(yōu)化[J]. 煤礦機械, 2017, 38(10): 113-115.
PEI Yong-chao, LIU Ji-zhu, YANG Zhi-han, et al. Structure Design and Optimization of Direct Drive SCARA[J]. Coal Mine Machinery, 2017, 38(10): 113-115.
[8] 王海峰, 尹彬, 羅銳捷, 等. 四自由度SCARA機器人系統(tǒng)機構(gòu)設計及運動學分析[J]. 機電工程, 2019, 36(12): 1320-1324.
WANG Hai-feng, YIN Bin, LUO Rui-jie, et al. Mechanism Design and Kinematics Analysis of 4-Dof SCARA Robot System[J]. Journal of Mechanical & Electrical Engineering, 2019, 36(12): 1320-1324.
[9] BRUZZONE L, BOZZINI G. A Statically Balanced SCARA-Like Industrial Manipulator with High Energetic Efficiency[J]. Meccanica, 2011, 46(4): 771-784.
[10] 楊梅, 趙冠群. 一種新型SCARA焊接機器人: 中國, 205798767U[P]. 2016-12-14.
YANG Mei, ZHAO Guan-qun. Novel SCARA Welding Robot: China, 205798767U[P]. 2016-12-14.
[11] 曹峰, 劉積昊, 周宸, 等. 基于SCARA的五自由度焊接機器人的研究[J]. 機電一體化, 2015, 21(3): 9-12.
CAO Feng, LIU Ji-hao, ZHOU Chen, et al. Research on 5-DOF Welding Robot Based on SCARA[J]. Mechatronics, 2015, 21(3): 9-124.
[12] CLAUDIO U, JUAN C. Design, Construction and Control of a SCARA Manipulator with 6 Degrees of Freedom[J]. Journal of Applied Research and Technology, 2019, 17(2): 396-404.
[13] 劉凱, 開亞駿, 章林. 一種新型工業(yè)機器人設計及運動仿真分析[J]. 現(xiàn)代制造技術與裝備, 2019(3): 56-57.
LIU Kai, KAI Ya-jun, ZHANG Lin. A New Industrial Robot Design and Motion Simulation Analysis[J]. Modern Manufacturing Technology and Equipment, 2019(3): 56-57.
[14] 董海濤, 武文革. 新型四軸碼垛機器人機構(gòu)設計與動力學仿真分析[J]. 包裝工程, 2020, 41(3): 176-181.
DONG Hai-tao, WU Wen-ge. Mechanism Design and Dynamics Simulation of a New Four-Axis Palletizing Robot[J]. Packaging Engineering, 2020, 41(3): 176-181.
[15] 馬春生, 張俊轅, 尹曉秦, 等. 新型串并聯(lián)機構(gòu)的運動學分析[J]. 包裝工程, 2021, 42(13): 241-245.
MA Chun-sheng, ZHANG Jun-yuan, YIN Xiao-qin, et al. Kinematic Analysis of New Series-Parallel Mechanism[J]. Packaging Engineering, 2021, 42(13): 241-245.
Design and Kinematics Analysis of a New 6-DOF SCARA Robot
ZHANG Liang-an1, WANG Xiang1, XIE Sheng-long2
(1. School of Mechanical Engineering, Anhui University of Technology, Anhui Maanshan 243002, China; 2. School of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018, China)
The work aims to design a new SCARA robot with six degree of freedom to solve the inflexibility for the end of the traditional SCARA robot with four degree of freedom. Firstly, based on the analysis of the structural characteristics of the traditional four degree of freedom SCARA robot, the end structure was improved to increase the degree of freedom of the robot, so as to improve the flexibility of the end. Then, the forward and inverse kinematics models of this robot were established by D-H parameter method and algebraic method respectively. On this basis, the simulation analysis of this robot was carried out in the robotics toolbox of Matlab with the comparison method, and the correctness of the kinematics model was verified. Finally, the trajectory planning of this robot was studied based on the quintic polynomial interpolation algorithm. The experimental results showed that the trajectory, velocity and acceleration curves of this robot were smooth and continuous without any breakpoints and abrupt points. It indicates that the robot moves smoothly and has good kinematic performance. It lays a good foundation for the subsequent motion control of this robot.
SCARA robot; D-H parameter method; robot kinematics; quintic polynomial interpolation; trajectory planning
TB486;TP241.2
A
1001-3563(2022)19-0235-08
10.19554/j.cnki.1001-3563.2022.19.027
2021–09–26
政府間國際科技創(chuàng)新合作重點專項(2017YFE0113200);國家自然科學基金(52205037);浙江省基本科研業(yè)務費資助項目(2022YW43)
張良安(1981—),男,博士,教授,主要研究方向為機械設計、控制系統(tǒng)、自動化生產(chǎn)線、工業(yè)機器人。
謝勝龍(1988—),男,博士,講師,主要研究方向為機器人原理與應用、數(shù)字孿生技術。
責任編輯:曾鈺嬋
猜你喜歡
包裝與食品機械(2021年5期)2021-11-06 11:40:14
微特電機(2020年11期)2020-12-30 19:42:32
制造技術與機床(2019年12期)2020-01-06 03:17:44
中國金屬通報(2019年6期)2019-08-20 06:52:52
熱處理技術與裝備(2019年3期)2019-07-24 08:03:36
組合機床與自動化加工技術(2019年5期)2019-05-24 03:48:50
電子制作(2018年17期)2018-09-28 01:57:00
通信電源技術(2018年3期)2018-06-26 06:33:36
機械研究與應用(2018年2期)2018-05-10 09:05:23
工業(yè)設計(2016年6期)2016-04-17 06:42:53
