
烯碳材料在人工肌肉領域的應用進展
2022-10-20 04:17:06溫燁燁任明邸江濤張錦
物理化學學報 2022年9期
關鍵詞:結構
溫燁燁,任明,邸江濤,張錦,*
1北京大學化學與分子工程學院,北京分子科學國家研究中心,北京大學納米化學研究中心,北京 100871
2北京石墨烯研究院,北京 100095
3中國科學院蘇州納米技術與納米仿生研究所,江蘇 蘇州 215123
4中國科學技術大學納米技術與納米仿生學院,合肥 230026
1 引言
人工肌肉是一類受外界刺激(光、電、熱等)發生可逆響應形變的智能材料和系統,又稱驅動器1。依賴機械傳動裝置的傳統驅動器,例如液壓/氣動驅動器,是在工業中廣泛應用的人工肌肉系統。其具有負載大、可輸出高力矩、動作迅速反應快的優點,但結構復雜且難以小型化。另一種具有廣泛商業應用的傳統人工肌肉是基于壓電陶瓷的精確控制機構——壓電驅動器,所產生的精確、極小的形變量使其可用在對儀器及控制精密度有高要求的微電子技術和生物工程等領域2,但同時也嚴格限制了使用場景。隨著包含物聯網、人機交互界面、仿生機器人及智能穿戴等領域的發展,傳統剛性驅動器已無法滿足先進應用領域對人工肌肉柔性、輕質、具有環境適應性以及高的能量轉換效率等新要求3,4。因此需開發集響應、驅動、結構等功能為一體的人工肌肉材料。
得益于材料科學的蓬勃發展,科學家們探索、制備了具有與生物肌肉相似運動功能的仿生人工肌肉材料。生物肌肉由一束肌肉纖維組成,雖然肌肉纖維在刺激下可產生50%的收縮,但在大多數動物中,由于受到所連接關節的限制,該收縮形變通常小于20%,且一塊肌肉能產生的輸出功率主要在0.1-0.5 W·g-1之間1。人工肌肉由生物肌肉所啟發,卻具備遠超于生物肌肉的驅動性能和更多元的驅動形式。新材料及其制造技術為能有效實現電能、化學能、熱能或光能等轉化成機械能的人工肌肉的制備提供了多種選擇,并發展出基于納米復合材料5、形狀記憶合金及聚合物6,7、介電彈性體8、離子聚合物/金屬復合材料9、導電聚合物10,11生物質纖維12-14等智能材料的人工肌肉1。其中,伴隨著納米材料的制備和表征技術的發展,特別是烯碳材料在制備、結構和性能上的巨大突破,由烯碳材料構筑而成的人工肌肉的相關研究推動了該領域的重大發展5,15-17。
烯碳材料是指由sp2雜化碳原子組成的全碳材料,主要包括碳納米管(CNT)和石墨烯。由于碳碳雙鍵的鍵連方式,理想的CNT與石墨烯具有超高的拉伸強度(> 100 GPa)、楊氏模量(~1 TPa)、高熱導率(> 3000 W·m·K-1)、高電導率(108S·m-1)和巨大的比表面積等特性18-20。將烯碳材料應用于人工肌肉領域,需在微觀和宏觀尺度架起橋梁。一方面以烯碳材料為基本結構單元,利用多種組裝方法構筑烯碳材料宏觀組裝體,通過組裝結構的設計可將烯碳人工肌肉微觀結構的體積形變轉化為彎曲、旋轉或伸縮驅動,從而實現集響應、驅動和結構一體化人工肌肉的制備5,21,22。另一方面可采用烯碳材料為增強賦能的添加相,通過復合策略,優化形狀記憶聚合物、導電高分子、智能水凝膠等人工肌肉材料的驅動性能,制備基于納米復合材料的多功能人工肌肉1。由于諸多優異的理化性質,烯碳材料在人工肌肉中具有獨特的應用。例如以具有捻曲結構的CNT紗線為主體材料制備纖維狀人工肌肉,當復合熱變形的客體材料以實現纖維的熱致驅動時,得益于CNT的電熱、光熱轉化能力,人工肌肉纖維還可在外加電壓和光照下發生形變,具有多源刺激響應性23。在產生驅動形變時,CNT紗線既作為人工肌肉的結構材料,又起到了能量轉化的作用,因此集響應、驅動、結構功能為一體。隨著應用場景的不斷革新,人工肌肉也向輕量、柔性以及結構-功能-智能一體化發展。由于自身優異的理化特性,烯碳材料在人工肌肉領域展現出巨大的應用潛力。
本文從烯碳材料的結構及性能出發,通過介紹烯碳材料在人工肌肉中的兩大應用方向,綜述了烯碳材料在人工肌肉領域的應用進展。首先基于烯碳人工肌肉的宏觀表現形態(一維纖維和二維薄膜),介紹了烯碳材料組裝體在人工肌肉中的應用。接著介紹了烯碳材料作為增強賦能的添加相,在納米復合材料人工肌肉中的應用。最后對人工肌肉的未來發展進行了展望。
2 烯碳材料人工肌肉
目前科學家通過各異的途徑與手段,將烯碳材料可控組裝成形式多樣的宏觀材料,實現其性能從微觀到宏觀的傳遞。2002年,清華大學范守善教授團隊24通過CNT陣列紡絲法,即從高度取向的可紡碳納米管豎直陣列中,連續拉出CNT,首次制備了CNT纖維。隨后Zhang等25報道了一種基于CNT可紡陣列的拉伸加捻紡絲法,制備碳納米管紡線。目前,陣列紡絲法、化學氣相沉積直接紡絲法以及濕法紡絲法是CNT纖維的主要制備方法26。2011,浙江大學高超教授團隊27發現了氧化石墨烯(GO)的溶致液晶現象,通過濕法紡絲和溶液還原的方法首次制備了石墨烯纖維。隨之發展出基于GO溶液的干法紡絲、限域水熱法以及薄膜加捻法等石墨烯纖維制備方法28。由于CNT以及石墨烯材料的柔性以及高強度的特征,可通過纖維制備過程直接加捻或者對成型纖維后加捻的方法,使CNT或石墨烯纖維具有一定捻曲結構17,29。除了宏觀的一維纖維材料以外,CNT與石墨烯還可通過多種制備方法組裝成二維薄膜材料30,31。以烯碳材料為基本構筑基元的纖維、薄膜在展現出優異力學性能的同時,還兼具高電導率、高熱導率等優點,且組裝體的結構及性能可調控性高,因此在要求材料具有結構功能一體化的領域具有極大的應用潛力。烯碳纖維及薄膜制備技術的發展,為基于烯碳材料的高性能人工肌肉的設計與制備奠定了堅實的基礎。
烯碳材料組裝結構和微觀形貌的差異,使其作為人工肌肉應用時,展現出不同的驅動形式及驅動性能。本節將基于烯碳材料人工肌肉的宏觀表現形態,包含一維纖維和二維薄膜,討論烯碳材料在集響應、驅動和結構功能為一體的人工肌肉中的應用。
2.1 纖維狀烯碳人工肌肉
人工肌肉材料在外加刺激下發生的可逆體積形變,是其產生驅動行為的基礎。2004年,Baughman教授團隊32采用濕法紡絲技術制備了單壁碳納米管/聚乙烯醇(SWNT/PVA)纖維,通過熱解除去PVA后,所得纖維在電化學池中受外加電壓刺激發生體積膨脹/收縮,產生高達26 MPa的應力(自然肌肉的100倍),該形變主要來源于離子在纖維結構內部的可逆注入與排出。利用DNA使SWNT解纏結可增加CNT纖維與離子作用的有效面積,并實現SWNT的交聯,所得DNA/SWNT復合纖維受電化學驅動可產生~0.12%的體積膨脹與收縮(圖1a)33。相比于上述SWNT纖維,DNA的交聯降低了復合纖維的蠕變行為,提高了驅動的可逆性(圖1b)。隨后通過復合聚吡咯(PPy)34,纖維素35、碳顆粒36等材料,發展出多種具有膨脹/收縮形變的CNT復合纖維人工肌肉。實際上,受結構限制,這一類CNT纖維材料的驅動行為僅來源于簡單纖維結構的體積膨脹與收縮,因此產生的形變量小(圖1b),驅動效果差,難以滿足復雜應用場景的需求。
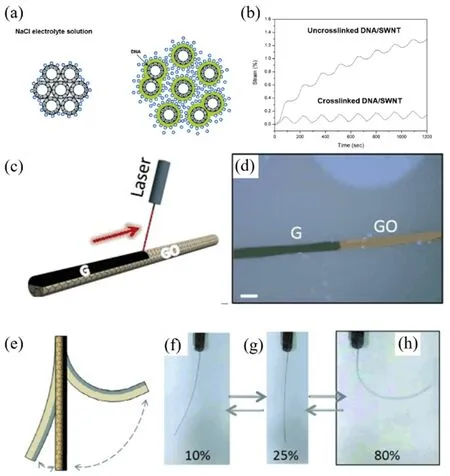
圖1 膨脹收縮和彎曲驅動的烯碳纖維人工肌肉Fig. 1 Carbonene artificial muscle fibers with expansion/shrinkage and bending actuation.
烯碳材料的組裝和纖維制備技術的發展,催生了新型纖維狀烯碳人工肌肉。得益于特殊的組裝結構,新型纖維狀烯碳人工肌肉可將材料的體積膨脹與收縮擴展為更豐富的驅動形式(彎曲、旋轉和伸縮驅動)并獲得優異的驅動效果。例如通過構筑纖維的不對稱結構,可制備具有大彎曲形變的烯碳纖維。在烯碳纖維中引入捻曲結構,可將外界刺激引起的體積形變轉換為纖維徑向的轉動和軸向的收縮,從而發生旋轉和伸縮驅動。烯碳纖維人工肌肉的運動形式取決于組裝結構,因此本節將按照人工肌肉運動形式的分類(彎曲、旋轉和伸縮驅動),介紹具有不同組裝結構的烯碳材料在纖維狀人工肌肉中的應用。
2.1.1 彎曲驅動的烯碳纖維人工肌肉
Cheng等37用激光加工GO纖維,使得部分區域還原,構筑具有不對稱結構的石墨烯/氧化石墨烯(G/GO)纖維(圖1c,d)。石墨烯和氧化石墨烯片層上含氧官能團數量的差異,造成兩者具有截然不同的親疏水性能。因此當暴露在濕度環境下,親水的GO組分吸附水分子發生體積膨脹,而G組分不發生明顯形變,由于纖維兩側表面形變量不一致,產生內部應力,纖維發生彎曲,即實現彎曲驅動(圖1e-h)。將纖維的一端固定,當環境相對濕度從25%提升到80%時,纖維的彎曲角度可由0°迅速增加至140°。Wang等38在石墨烯纖維一側電鍍一層PPy,制備了具有不對稱結構的石墨烯/PPy復合纖維。導電高分子PPy在不同電壓下進行摻雜與去摻雜時,可通過離子的遷移產生體積形變,而石墨烯在電解液中由于電化學雙電層充放電過程,也會產生體積形變。因此石墨烯/PPy復合膜可受外加電壓刺激發生彎曲驅動。石墨烯在復合纖維中既作為導電組分,又是驅動的主體材料。
不對稱結構的設計是人工肌肉產生彎曲驅動的關鍵。對于纖維狀人工肌肉而言,其彎曲驅動的研究并不多,學者更關注具有更高能量轉換效率、功率密度的旋轉和伸縮致動。更多的關于彎曲致動的結構設計和應用將在下節二維薄膜狀烯碳人工肌肉部分進行介紹。
2.1.2 旋轉驅動的烯碳纖維人工肌肉
Baughman教授團隊17在人工肌肉領域取得許多開創性的成果。2011年,他們首先報道了可用作旋轉驅動器的CNT紗線。隨著捻度增加,具有捻曲結構的CNT紗線內部產生扭矩,而紗線可通過體積變化實現內部扭矩的平衡。此時,解捻的過程使纖維結構發生變化,產生旋轉驅動(圖2a,b)。值得注意的是,僅有纖維狀的人工肌肉才可發生旋轉驅動。
將扭曲的CNT紗線作為工作電極浸入電解液中,電解質離子和溶劑化物質在外加電壓作用下,從電解液遷入CNT紗線內部引起紗線體積膨脹和結構解捻,驅使CNT紗線發生轉動17。若CNT紗線僅是一端固定,另一端連著可自由轉動的旋漿(圖2c),該人工肌肉需經過多次循環后才可獲得可逆的旋轉驅動,而該過程降低了旋轉驅動的驅動量。為了提高轉動的可逆性,他們開發了一種兩端固定的CNT紗線人工肌肉構型,即將CNT紗線下半部分浸入電解液中,下端完全固定,上端連接一個力/距離傳感器,可上下移動并保持固定應力(圖2d)。當浸入電解液的CNT紗線發生解捻時,下部分失去的捻度作為上捻轉移到上部分。撤去外加電壓后,上部分CNT紗線可作為復位彈簧,將捻度傳回下部分,從而實現完全的可逆旋轉。若將可自由旋轉的旋漿置于兩部分中間,則旋漿可在旋轉驅動和回復的過程中發生相反方向的旋轉。該CNT人工肌肉能夠在1.2 s內加速旋漿轉動(驅動電壓5 V),轉速高達590 r·min-1,產生與大型商用電機可比的單位質量的力矩和機械功率,可用作微流體攪拌器件(圖2e)。但該人工肌肉在88 MPa載荷下僅產生1%的收縮驅動。由此可見,這類加捻結構可產生良好的轉動驅動效果,但收縮驅動量小。因此加捻結構一般用作旋轉驅動器的結構設計中。
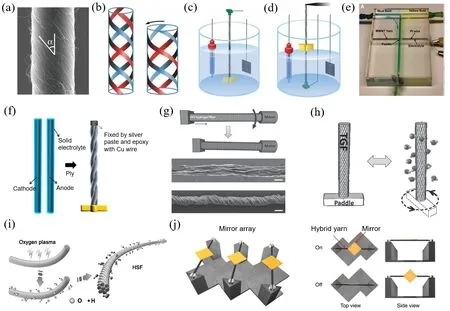
圖2 旋轉驅動的烯碳纖維人工肌肉Fig. 2 Carbonene artificial muscle fibers with torsional actuation.
上述電化學驅動的人工肌肉雖然僅需較低電壓就可產生驅動效果,但使用時需依賴電解液。電解液較大的體積與質量,降低了整個驅動系統的體積和能量密度。Lee等39將涂覆有凝膠電解質的兩條低捻度CNT紗線攪合在一起,實現陽極和陰極人工肌肉驅動行程的匹配,得到在環境中工作的旋轉驅動全固態人工肌肉(圖2f)。該人工肌肉在5 V的外加方波電壓下,轉速可達2330 r·min-1。
具有加捻結構烯碳纖維的轉動驅動來源于纖維內部結構間隙擴大而產生的解捻,因此在設計具有加捻結構的纖維狀人工肌肉時,可采用加捻的烯碳纖維為主體結構,利用其他能夠在其結構間隙中可逆注入與脫除的分子(例如水)29,40作為外界刺激,實現可逆轉動驅動,另一個途徑則是以能夠在外界刺激下發生可逆形變的材料為客體材料,與加捻烯碳纖維復合,從而制備得到具有不同刺激響應的轉動驅動人工肌肉23,41-46。
Cheng等29對GO氣凝膠進行加捻,制備濕度驅動的轉動人工肌肉(圖2g,h)。由于GO表面具有豐富的羧基、羥基等含氧官能團,使其可快速吸附環境濕度中的水分子,產生體積膨脹,發生轉動驅動,該濕度驅動的人工肌肉在3.5 s內轉速可達5190 r·min-1。利用氧等離子體對加捻的CNT紗線進行表面親水化處理,同樣可以獲得對水/蒸汽具有響應性的轉動CNT人工肌肉(圖2i)40。
Baughman教授團隊23以具有高熱膨脹系數的石蠟為客體材料,制備了CNT復合紗線。該人工肌肉可在15 Hz,40 V·cm-1的方波電壓刺激下循環驅動200萬次,且平均轉速達11500 r·min-1。隨后他們將石蠟和聚苯乙烯-聚(乙烯-丁烯)-聚苯乙烯(SEBS)共聚物復合,優化客體材料組分,制備了具有精確和快速定位的旋轉人工肌肉,轉速最高達9800 r·min-1,并展示了該人工肌肉在旋轉鏡陣列(可快速在水平/垂直鏡面間切換)中的應用(圖2j)41。此外,客體材料還可擴展為聚丁二炔、聚乙二醇(電熱驅動)、鈀(氫氣吸脫附驅動)23、聚丙烯酸鈉(近紅外光驅動)42、海藻酸鈉(光驅動)43、含葡萄糖氧化酶的熱響應水凝膠聚N-異丙基丙烯酰胺(PNIPAm,由于酶的放熱催化效應,復合人工肌肉可由葡萄糖引起體積形變)44等材料,豐富了具有轉動驅動人工肌肉纖維的應用場景,例如用作檢測濕度、氣體、生物分子的傳感器。
在制備具有主客體結構的烯碳纖維人工肌肉時,除了采用直接浸潤法實現客體材料與烯碳纖維的復合外,還可匹配烯碳纖維的干法和濕法紡絲過程制備復合紗線45,46。針對不適用于干法、濕法過程的客體材料,Lima等47開發出主客體雙紡法制備復合CNT紗線,即利用從CNT豎直陣列中抽出的CNT氣凝膠薄膜具有高機械強度及大比表面積的特征,將客體材料附著在薄膜表面,結合后續的加捻紡絲過程,制備復合CNT紗線(圖3a-d)。
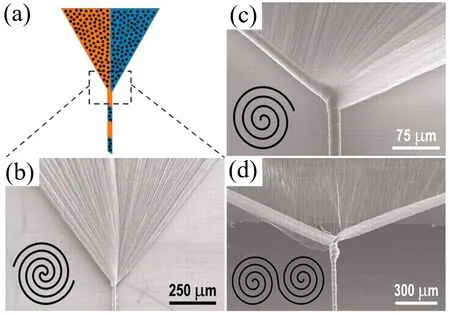
圖3 主客體雙紡法制備復合CNT紗線Fig. 3 Fabrication of composite carbonene yarns by biscrolling.
2.1.3 伸縮驅動的烯碳纖維人工肌肉
Zhang等25從豎直CNT陣列中抽膜、加捻并編織得到加捻CNT的單紗紡線、兩股的CNT螺旋紡線、四股、針織和打結CNT紡線,并深入研究其力學性能。加捻及編織后的CNT紡線具有高韌性,有趣的是,螺旋結構的CNT紡線還具有大的泊松比。隨著應變增大,加捻CNT紡線的泊松比由2.0增加至2.7,而兩股的CNT螺旋紡線則由3.3增大至4.2(圖4a-c)。即螺旋結構可進一步放大紡線在截面/體積變化下,引起的長度方向的形變,為通過體積變化實現大應變的伸縮驅動人工肌肉的制備提供了結構基礎。而過度加捻的纖維可自發地形成螺旋結構(圖4d)39。基于螺旋結構人工肌肉的伸縮形變本質也是捻曲結構的解捻,因此為了獲得伸縮形變,需防止纖維紗線產生旋轉,才可通過螺旋結構將徑向的轉動轉化為軸向的收縮。順著纖維扭轉方向進一步過度扭曲得到的加捻螺旋線圈具有同手性結構,而旋向與纖維扭轉方向相反的則具有異手性結構。對于同手性結構的螺旋線圈,當內部產生解旋力矩時,螺旋線圈間距收縮變小,發生收縮變形;而異手性結構的螺旋線圈則發生伸長變形(圖4e)48。
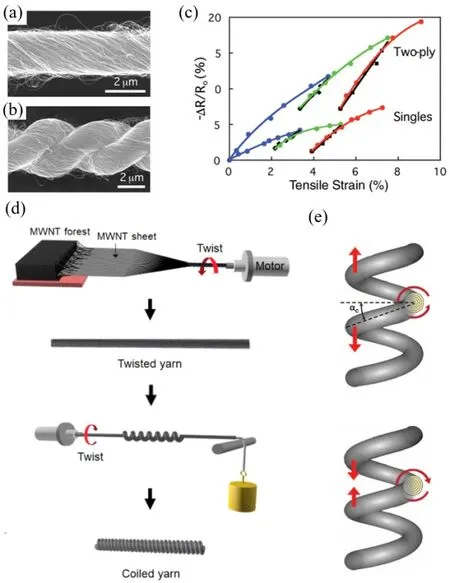
圖4 螺旋結構紗線的力學性能、制備及驅動Fig. 4 Mechanical properties, fabrication and tensile actuation of coiled fibers.
Lee等39將兩根涂覆有凝膠電解質(硫酸/PVA)的螺旋CNT紗線絞合,制備的全固態伸縮驅動人工肌肉最大收縮形變為1.3%,可拉動自身重量25倍的重物(圖5a)。隨后Lee等49從電化學驅動人工肌肉的原理出發,即電荷注入導致紗線體積膨脹,提出由于大的離子半徑,有機電解質可為電化學驅動人工肌肉提供更高的體積形變以優化驅動效率。他們探討了不同有機電解質對驅動效果的影響,發現具有螺旋結構的CNT紗線在液態的四氟硼酸四乙基銨鹽(TEA·BF4)電解質中可獲得高達16.5%的收縮形變(圖5b)。進一步引入固體電解質,設計具有平行和編織結構的人工肌肉(圖5c,d),其收縮形變分別達11.6%和5%。在電化學驅動人工肌肉中,有機電解質雖具有高電化學窗口和大離子半徑的優點,但其使用也受限于自身的毒性、高價格、低離子電導率的缺點。因此也發展出具有快速驅動響應,基于無機液體電解質的人工肌肉50。由于反向離子的嵌入和遷出,電化學驅動CNT人工肌肉的體積變化不隨掃描電壓發生單調性變化,即驅動應變與掃描電壓間呈現“雙極”關系,且驅動性能隨掃描速率增加而降低。Chu等51通過聚電解質功能化策略,改變了電化學驅動CNT人工肌肉的零電位點,實現了單一離子的嵌入與遷出(圖5e,f),并解決了驅動性能對工作電極電容特性的依賴。制備的人工肌肉能夠在高頻下響應(10 Hz),且在低電壓下(1 V)可實現高功率密度(8.17 W·g-1),高應變(3.85%-18.6%)的驅動。
與上述旋轉驅動纖維狀人工肌肉類似,通過客體材料的設計,可制備具有不同刺激源響應性的伸縮驅動纖維狀人工肌肉。螺旋結構的CNT紗線經過乙醇浸潤后可保持結構完整性,因此可通過吸附多種溶劑產生驅動信號52,該結構除了由CNT紗線構成外,還可是CNT與石墨烯53、還原氧化石墨烯(rGO)50或GO54的復合紗線。采用硅膠作為客體材料,復合CNT螺旋卷繞紗線可因吸附、脫附丙酮實現2 MPa應力下50%的可逆收縮55。Jin等56利用自合股的方式制備了具有穩定螺旋結構的人工肌肉。該人工肌肉像天然肌肉一樣,在未發生驅動時處于無張力狀態且吸附丙酮等有機溶劑后能夠產生約13.3%的收縮變形。采用親水性高分子為客體材料時,復合紗線可由水或者相對濕度變化進行驅動(圖5g)45,57。
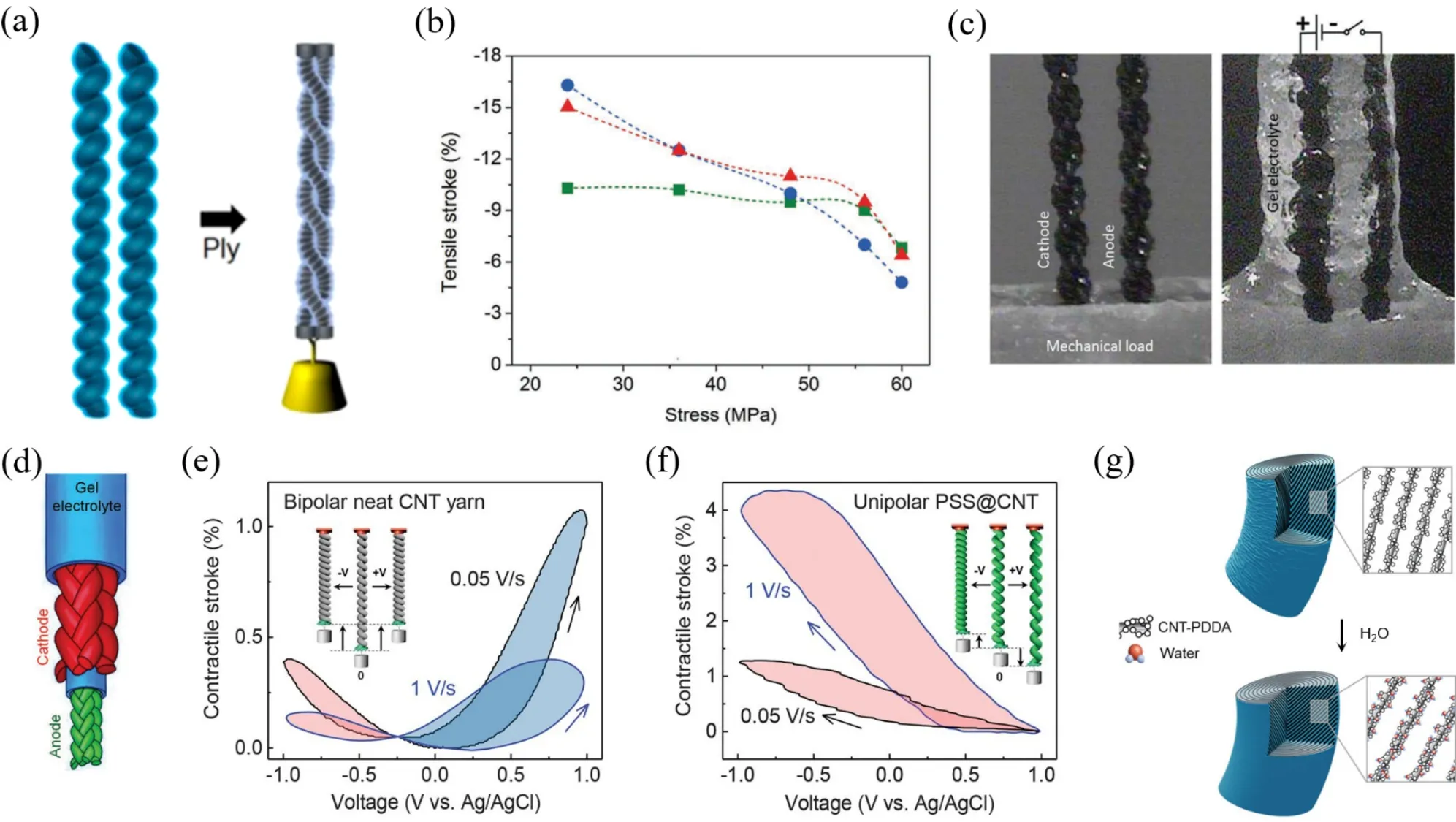
圖5 伸縮驅動的烯碳纖維人工肌肉Fig. 5 Carbonene artificial muscle fibers with tensile actuation.
除了受電化學和溶劑吸附驅動外,人工肌肉還可由溫差驅動。Lima等23制備的兩端固定,復合石蠟的螺旋結構CNT紡線在脈沖時間為50 ms,18.3 V·cm-1的電壓加熱下,可提升相當于自身重量17700倍的重物,產生3%的收縮應變并循環運行超過140萬個周期。進一步增大通電電壓,減小脈沖時間,可優化其驅動性能。在脈沖時間為15 ms,32 V·cm-1的電壓加熱下,復合紗線所提重物重量提高至自身重量的175000倍(收縮應變~1%)。收縮過程做功0.836 J·g-1,對應輸出功率密度為27.9 W·g-1,是哺乳動物骨骼肌輸出功率(0.323 W·g-1)的85倍。基于溫差驅動發生伸縮形變的人工肌肉,其客體材料還可擴展為彈性體和甲醇的混合物58、熱塑性聚氨酯樹脂59、環氧樹脂60等。
在常規的主客體結構中,客體材料的復合方式是從內到外均勻地填充在CNT紗線間隙中。而Baughman教授團隊61研究發現,人工肌肉在對外輸出機械能時,纖維紗線中心部分的纖維做功甚少,其外層是提供機械能輸出的主要部分。且無論是基于熱驅動、電化學驅動或者溶劑驅動,所需的刺激如熱量、電荷及溶劑分子,在紗線內部和外部的傳輸均需要較長時間,是限制人工肌肉纖維響應速度的一大原因。因此Baughman教授團隊61提出了一種新型的人工肌肉結構——鞘-芯雙層結構(圖6a-e)。內芯采用加捻或螺旋卷繞的CNT紗線,鞘層選用聚(環氧乙烷)與四氟乙烯和乙烯基醚磺酰氟(SFVE)共聚物的混合物(PEO-SO3),或者彈性聚氨酯(PU)等,所制備的PEO-SO3@CNT人工肌肉在空氣中通過吸收乙醇蒸汽驅動或電熱致動,最大可分別產生4.44 W·g-1(收縮形變~13%)和2.6 W·g-1(收縮形變~8.2%)的平均收縮功率密度,相比常規的主客體復合結構,該結構將人工肌肉的工作能力提高了1.7-2.15倍。Ren等62構筑了一種離子液體填充納米纖維鞘層的螺旋結構復合CNT紗線,通過自絞合和剪切組裝成電化學驅動的人工肌肉(圖6f),該人工肌肉具有良好的穩定性及驅動性能,在0.05 Hz的電壓頻率下,收縮應變達到11.6%,與彈簧集成可制備具有抓取、保持并釋放重物能力的三爪抓手。為了使整個紗線體積都可實現有效的驅動,Wang等63將四股CNT紗線加捻,設計了一種內部具有高捻度結構的人工肌肉纖維。在3.0 V電壓驅動下,液體電解質中的CNT紗線可在5 s內產生62.4%的收縮形變,舉起相當于紗線重量10000倍的重物。
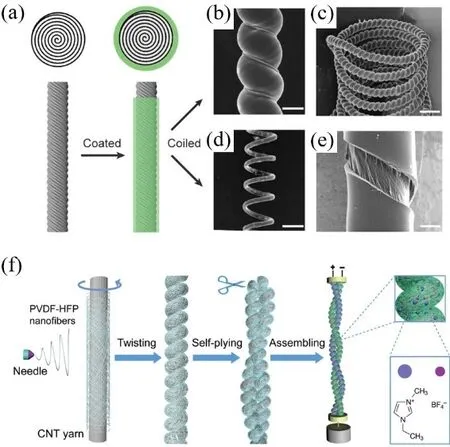
圖6 鞘-芯雙層結構的烯碳人工肌肉纖維Fig. 6 Carbonene artificial muscle fibers with sheath-core structures.
2.2 薄膜狀烯碳人工肌肉
Baughman教授團隊64發現從豎直陣列直接抽出的CNT氣凝膠膜在電刺激下可產生面內形變(圖7a)。對真空中的CNT膜兩端施加2 kV電壓,膜的溫度超過1000 °C,此時膜在長度方向發生1%的收縮,并產生~10 MPa的收縮應力,同時寬度方向伸長60%。二維薄膜材料的面內形變往往存在變形量小的問題,且長度/寬度方向形變的驅動方式在實際場景中的應用有限。而對于薄膜材料的彎曲驅動,其驅動形式可設計、可編程,具有多樣性。烯碳材料由于自身優異的力學性能以及柔性特征,是制備薄膜材料的理想構筑基元。因此基于烯碳材料且具有不對稱結構的二維薄膜,是一類受廣泛關注及研究的彎曲驅動器,本節將重點討論驅動形式為彎曲致動的薄膜狀人工肌肉。
2.2.1 全烯碳材料的薄膜驅動器
1999年,Baughman等65首次報道了基于SWNT膜的電化學驅動器。當對SWNT施加電壓時,大量電荷注入CNT,此時溶液中帶相反電荷的離子會吸附在CNT表面,由于離子的注入以及離子間的靜電排斥,SWNT管發生伸長及膨脹。不同離子的排斥力不同,導致兩側SWNT膜的形變不一致,從而整體產生彎曲驅動(圖7b,c)。Qu教授團隊66分別用氧等離子體和正己烷等離子體處理rGO膜兩側,構筑了兩側分別具有親水(接觸角約為15°)和疏水(接觸角約為90°)結構的不對稱rGO薄膜。在水性電解質中,兩側電化學活性的差異導致薄膜在電壓驅動下產生不對稱形變,發生彎曲(彎曲率最大為0.6 cm-1) (圖7d,e)。Ruoff課題組67用真空抽濾方法制備了GO/CNT雙層膜驅動器,由于CNT因表面疏水對濕度不敏感,而GO的層間距可隨濕度發生變化,即GO薄膜可吸水發生體積形變。因此復合膜能夠隨濕度變化產生不同程度的彎曲。GO片層上的含氧官能團使其具有良好的親水性,其組裝體可由于片層在不同溫度和濕度下發生水分的吸脫附而產生形變,且形變能力取決于GO片層的含氧官能團數量68。一方面,通過控制成膜過程中不同結構GO片層的遷移可構筑具有梯度含氧官能團結構的GO薄膜69。另一方面通過直接制備或者對GO薄膜進行單側還原,可得到GO/rGO不對稱薄膜70-73。這些內部片層具有不同化學結構的石墨烯基薄膜,都能在溫度/濕度驅動下發生彎曲變形。此外,Qu教授團隊74研究表明,在光滑基底上GO溶液通過溶劑揮發誘導自組裝所得的薄膜具有不對稱結構,靠近基底一側由于基底的誘導作用表面光滑,而與空氣接觸一側在溶劑揮發的誘導下會相對粗糙(圖7f-h),該單層薄膜同樣可受濕度驅動。
2.2.2 基于烯碳材料的異質雙層膜驅動器
相比于具有梯度/不對稱化學結構的純烯碳薄膜驅動器,異質雙層膜結構的驅動器得益于兩層材料形變能力的顯著差異,可獲得更高的彎曲形變能力。烯碳材料薄膜為異質雙層膜驅動器中的一層時,除了作為提供形變的驅動層外,還可由于自身的電導性、電熱轉化和光熱轉化能力賦予雙層膜電、光刺激響應能力。對于異質雙層結構的薄膜驅動器,雙層膜間的界面相互作用強弱,決定了雙層膜結構在反復彎曲驅動過程中的穩定性,材料的選擇和界面設計是構筑雙層膜結構驅動器中的關鍵問題。
Qu教授團隊75利用rGO與PPy在電解液中可受外加電壓刺激發生形變的特征,制備了電化學驅動的rGO/PPy雙層薄膜,其彎曲率可達1 cm-1。為了使沉積的PPy層與rGO結合的更緊密,該工作在電沉積前利用氧等離子體對rGO表面進行了親水化處理。同樣的,基于CNT/PPy雙層結構的薄膜也具有電化學驅動性能76。Shi等77在GO膜上蒸鍍一層金膜,利用金的導電性,對驅動器通電使其溫度升高,結合GO受熱產生形變和金膜熱膨脹系數低的特征,制備了電熱響應的彎曲驅動器。進一步通過激光加工使復合膜獲得特定的形狀,可構造模仿豬籠草的雙層膜驅動器。Xu等78以小尺寸的GO(SGO)為熱致收縮層,聚偏二氟乙烯(PVDF)為熱膨脹層,通過刮涂法制備了雙層膜驅動器。結合兩個熱膨脹系數相反的材料,提高了雙層膜的熱致彎曲驅動效果。由于SGO可以對濕度、熱同時發生響應,且具有光熱效應,因此構造的驅動器能同時被多種刺激源(濕度、熱、光)驅動,并展示出良好的驅動性能。綜合石墨烯和特定排列CNT具有的負熱膨脹系數及導電性的特點,通過復合聚二甲基硅氧烷(PDMS)等熱變形材料,可制備焦耳熱響應的彎曲驅動器,進一步可設計出能負重行走的軟體機器人(如圖7i)79,以及抓舉重物的機械爪(如圖7j)80,81。
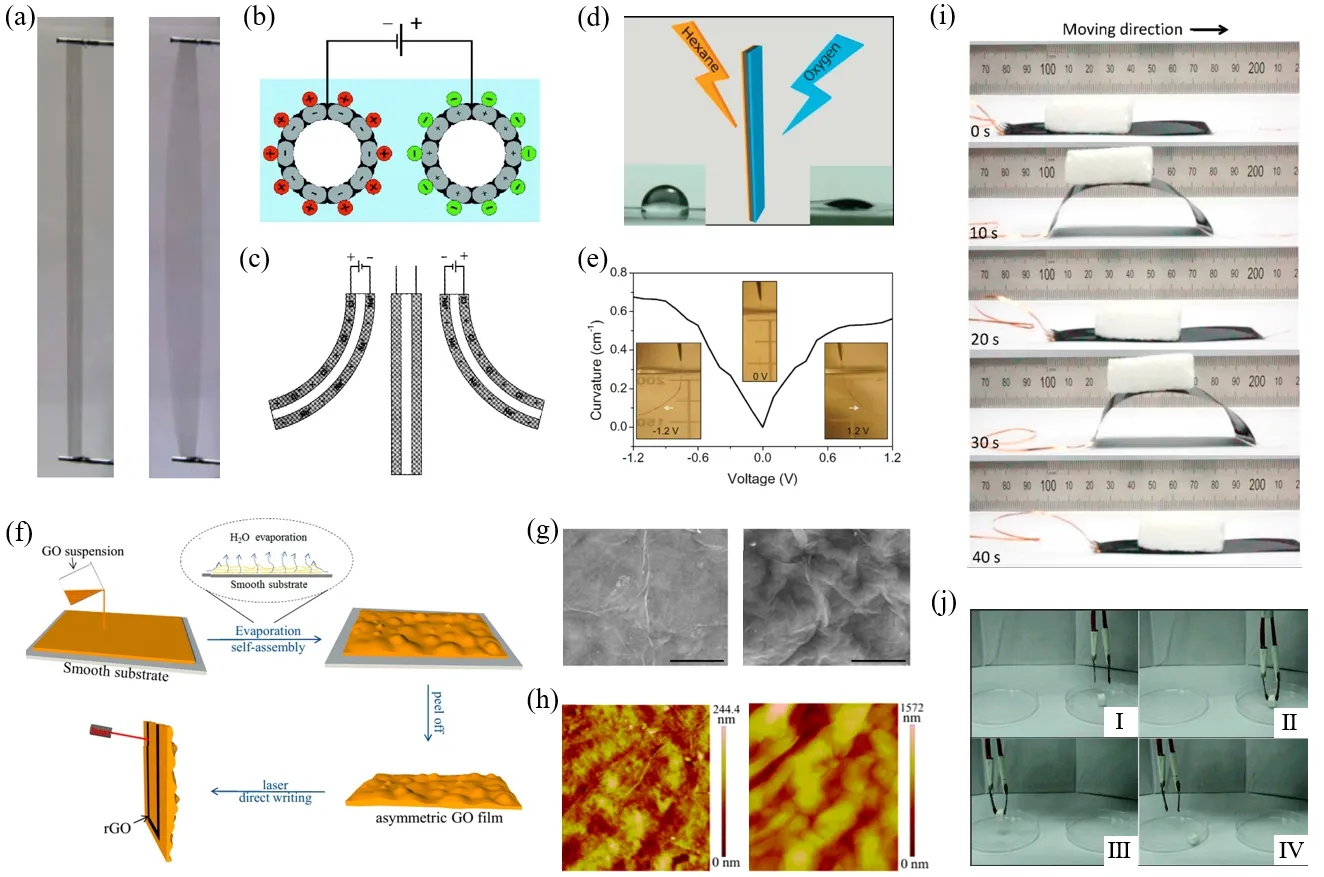
圖7 基于烯碳材料的薄膜狀人工肌肉Fig. 7 Artificial muscle films based on carbonene materials.
2.2.3 基于三明治結構的彎曲驅動器
烯碳材料的二維組裝體薄膜,具有高電導率、柔性以及耐酸堿等優點,是一種良好的柔性集流體以及電極材料30,82,83。基于離子聚合物-金屬復合材料(IPMC)的人工肌肉具有三明治結構,其由膜狀的離子聚合物骨架和鍍在兩側表面的貴金屬電極組成。對IPMC薄膜施加電壓時,薄膜向陽極彎曲產生驅動。為保證電極的導電性良好,同時具有化學惰性,不被電解液腐蝕,傳統的IPMC一般采用貴金屬鉑或者金作為電極,因此驅動器造價昂貴。金屬在反復彎折后容易產生裂紋導致中間層的電解質泄露,降低了驅動器性能和使用壽命(圖8a)84。烯碳材料的出現使IPMC人工肌肉中的金屬電極有了理想的替代品,并促使其獲得長足的發展16,84-88。
Li等85通過熱壓的方法,構筑了兩側為自支撐SWNT薄膜,中間為殼聚糖/聚離子液體電解質的三明治結構驅動器。由于SWNT的多孔結構及其與其他組分間良好的相容性,SWNT電極與中間電解液層結合緊密,且SWNT自身優異的力學性能也有效提高了復合驅動器的強度與模量。SWNT的高電導率和高比較面積,加快了電極之間的電荷注入和離子遷移速度,賦予驅動器大而快的彎曲響應形變。該驅動器可在19 ms內受激發生形變,使用頻率范圍在幾十到數百赫茲。
Im等86以Nafion膜為中間絕緣層,兩側通過物理接觸結合石墨烯膜,制備的三明治結構薄膜可獲得彎曲率最高為0.3 cm-1的彎曲驅動效果。薄膜中石墨烯與中間絕緣層結合力弱,因此其三明治結構易由于反復的彎曲變形而破壞,降低了驅動器的循環使用壽命。Kim等84用激光處理rGO的一面使其粗糙化,增強其與聚合物中間層的結合力(圖8b),制備得到的彎曲驅動器可以在4.5 V電壓下穩定循環驅動360次,且性能無明顯下降。除了用于替換IPMC中的金屬電極以外,烯碳薄膜也可用作驅動介電彈性體發生形變的電極材料89,90。
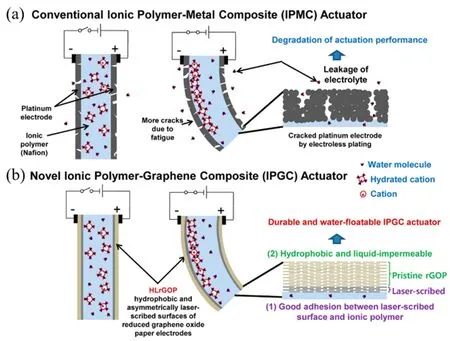
圖8 IPMC與IPGC的結構Fig. 8 Schematic representations of the structures of IPMC and IPGC.
3 烯碳材料在人工肌肉中的復合功能化應用
烯碳材料由于具有高強度、高模量及高比表面積的特征,且可利用多種手段實現表面修飾從而為烯碳材料與其他材料提供豐富的相互作用形式(離子鍵、氫鍵、π-π相互作用以及共價鍵等單一或多種協同作用)。因此,烯碳材料可用作復合材料中的增強相,通過與基體間的相互作用,耗散應力從而達到復合增強的目的91。對于其他力學性能較弱的人工肌肉材料,可通過復合烯碳材料提高力學性能以獲得穩定的驅動結構35。此外,得益于烯碳材料的高導電性和光熱、電熱轉化能力,復合了烯碳材料的人工肌肉,可由單一刺激源擴展為多重刺激響應,并且具有可編程的響應形變及感知能力。
3.1 增強及擴展刺激響應功能
形狀記憶材料,例如形狀記憶合金、形狀記憶高分子以及形狀記憶陶瓷等,因具有形狀記憶效應(在外界刺激下恢復為變形前的形狀),可用作人工肌肉材料。Yuan等92對處于玻璃化轉變溫度以上的PVA纖維實施加捻,隨后降溫將捻應力固定。當再次加熱到玻璃化溫度以上,就可實現解捻。該工作結合PVA的形狀記憶效應和捻曲技術,制備了扭矩平衡的熱驅動轉動人工肌肉。通過復合SWNT和GO,纖維室溫下的楊氏模量分別增加至13.5和12.5 GPa (純的PVA纖維剪切模量:4.9 GPa)(圖9a),獲得了更高的驅動功率密度和驅動扭矩。PVA-GO和PVA-SWNT纖維人工肌肉可分別產生~0.27和0.12 μN·m的扭矩,2.766和1.115 J·g-1的能量密度,遠高于純的PVA人工肌肉(扭矩:0.11 μN·m;能量密度:0.925 J·g-1) (圖9b)。由于GO具有二維片層結構,因此相比于SWNT,對PVA扭轉性能的改善更為明顯。
介電彈性體是一種介電常數高且具有彈性的聚合物。當向其薄膜兩側施加電壓時,帶相反電荷電極間的相互吸引力使薄膜壓縮,而同一側由于相同電荷的排斥力使薄膜伸長,即發生電驅動。通過復合烯碳材料,可使介電彈性體的機電性能發生變化93,94。例如Wang等93將多壁CNT填充到介電彈性體中,獲得了力學性能和導電性得到提高的復合材料,相比與純的介電彈性體驅動器,復合材料驅動器可在更低電壓刺激下產生更高的形變(28%) (圖9c)。
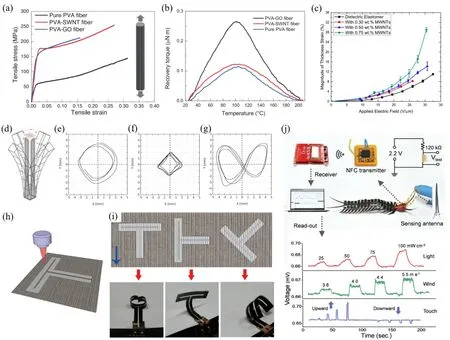
圖9 用于增強與賦能人工肌肉的烯碳材料Fig. 9 Mechanical enhancements and multi-functionalization of artificial muscles by carbonene materials.
刺激響應水凝膠中交聯的高分子網絡可在外界刺激下(熱、pH、光、電場及生物分子等)可逆吸收/排除水分發生溶脹/收縮從而產生體積形變,是一種典型的軟體驅動器。雖然水凝膠對外輸出的驅動力非常小,但巨大的體積形變是其優勢。PNIPAm是具有良好熱響應的水凝膠,但透明的特性使其對光無響應,而光驅動器具有可以遠程操控等優點。將GO或rGO與PNIPAm復合,既能增強水凝機械強度,又可利用GO/rGO的光熱轉化效應實現水凝膠的光熱驅動。基于復合結構的水凝膠具有光致彎曲的性能,例如GO/PNIPAm和PNIPAm雙層結構水凝膠受光照后在約75 s內發生彎曲驅動,具有梯度GO含量的GO/PNIPAm水凝膠彎曲率最高能到2.4 cm-1,以及rGO/PNIPAm和聚丙烯酰胺組成的異質雙層結構水凝膠在光強為63 mW·cm-2時,彎曲率可達120 cm-1,響應時間為30 s95。半晶態聚合物在受熱時,內部結晶區域會發生體積膨脹而無定形的分子鏈則發生長度方向的收縮。因此高度取向的半晶態聚合物纖維,例如聚乙烯和尼龍纖維,受熱時會發生長度收縮并伴隨著直徑膨脹。Baughman教授團隊48將捻曲技術應用在尼龍6,6纖維上,制備了具有螺旋結構的尼龍纖維人工肌肉。尼龍纖維受熱發生形變可使加捻結構解捻,因此該纖維可在溫度刺激下產生49%的驅動量,輸出功率可達27.1 W·g-1。若將CNT薄膜纏繞在纖維表面,利用CNT的導電性,可通過焦耳熱驅動纖維變形。
3.2 可編程的響應變形
除了前述具有不對稱結構的人工肌肉可受刺激產生彎曲驅動外,對結構均一的材料施加不對稱刺激,也可實現彎曲驅動。通過合理設計材料結構,制備具有更復雜響應變形的人工肌肉才能滿足多場景下的先進應用需求96。由于烯碳材料的可加工性,通過簡單的方法即可實現其在刺激響應材料中的圖案化,從而利用其產生局部刺激,最終實現人工肌肉可編程的響應形變。實際上,烯碳材料在人工肌肉中的這一類應用,也是基于其電熱/光熱轉化效應。
Mirvakili等97采用浸漬涂覆的方法在梁狀的尼龍表面覆蓋了含有石墨烯的光熱轉化功能涂料,并利用高功率的激光二極管實現對尼龍梁的光熱驅動。通過對梁的單一或者多個側面施加刺激,可實現人工肌肉的多方向驅動(圖9d-g)。Li等98從CNT豎直陣列中抽出氣凝膠薄膜,并經過雙輥壓機獲得具有高度各向異性的巴基紙(Bucky paper,BP)。利用激光對CNT巴基紙進行圖案化加工,可得到具有特殊形狀且面內CNT沿著特定方向嚴格排列的巴基紙(圖9h)。以其為柔性電極,與PDMS復合,制備雙層結構的驅動器。由于巴基紙在平行于CNT和垂直于CNT兩個面內方向上的導電性存在巨大差異。經過圖案化后巴基紙面內可產生不同的電熱效應,從而使PDMS層部分區域受熱發生形變。通過精巧的設計,該驅動器可產生大的彎曲形變(> 180°),螺旋卷曲(~630°) (圖9i),甚至實現模仿手指的仿生驅動。利用激光誘導生成石墨烯的方法實現圖案化99-101,或者合理設計雙層結構驅動器中石墨烯層的位置102,103,都可對人工肌肉材料的形變進行編程設計。
3.3 傳感功能
對于柔性和人工智能機器人而言,裝配準確的具有實施運動感知能力的肌肉材料,對其實現對環境的自主響應具有重要意義。因此開發集驅動和傳感一體的人工肌肉是該領域的必然趨勢。人工肌肉的驅動過程總是伴隨著體積的變化,若該形變可改變其中烯碳材料構建的導電網絡通路,在恒壓電源下,由于烯碳材料電阻的變化,材料可輸出不同的電流信號。因此烯碳材料還可在人工肌肉中起到傳感的功能104-107。
Wang等106以聚多巴胺還原的氧化石墨烯(PDG)和PVDF制備了雙層膜結構的驅動器,并在PVDF另一側3D打印了基于石墨-CNT的U形電路。由PDG與PVDF層構成的驅動器除了具有熱響應功能外,還可通過PDG層的光熱轉換功能實現光響應驅動。當溫度發生變化時,PVDF中由反式β相排列的聚合物鏈產生的永久偶極子的取向隨之變化,并在PVDF的厚度方向上產生熱電勢,因此PVDF層可起到自供電的溫度傳感功能。而U型的石墨-CNT電路,其內阻隨PVDF形變發生變化,可作為應變傳感器。集光、熱響應和溫度、形變傳感為一體的薄膜狀驅動器,由于結構柔性和可加工性的特征,通過引入可編程的折紙技術,可進一步設計制造出具有綜合感知和運動能力的薄膜機器人(圖9j)。除了傳感體系的應變外,烯碳材料還可用作溫度傳感部件,例如復合了甲基纖維素的CNT膜具有負的電阻溫度系數(-3807.7 ppm·K-1),因此在雙層膜驅動器中還可用作溫度傳感層107。
4 總結與展望
烯碳材料在人工肌肉領域的應用,概括而言均是從其獨特的理化特性出發,作為人工肌肉中的結構、功能性材料的應用。以烯碳材料為基本組成單元的人工肌肉,宏觀表現形態可為一維纖維和二維薄膜。由于形態上更接近生物肌肉中的肌原纖維,纖維狀人工肌肉在仿生驅動器中更具有優勢。而基于烯碳材料的纖維狀人工肌肉,可通過組裝結構的設計,實現高效的彎曲、旋轉和伸縮驅動。特別地,具有加捻和螺旋結構烯碳纖維的制備,為推動仿生肌肉纖維的發展起到了重要作用。基于烯碳材料的二維薄膜狀人工肌肉,驅動形式以彎曲驅動為主。在這一類集響應、驅動及結構為一體的人工肌肉中,烯碳材料和整體不對稱結構中的結構設計、客體材料和異質材料的種類選擇是其設計與制備中的關鍵問題。當烯碳材料在納米復合人工肌肉材料中發揮功能性應用時,烯碳材料可作為增強賦能相,通過優化材料的力學、電學特性以提升人工肌肉的驅動性能、擴展響應刺激種類、響應形變形式以及賦予其傳感功能。
雖然烯碳材料在人工肌肉領域的應用已獲得了長足的發展,并取得了諸多優異的性能。但其中仍有一些亟待解決的問題:(1)烯碳材料的成本問題限制了相關人工肌肉材料的應用,因此需開發高效、便捷的生產和組裝方法,以用于烯碳材料及其人工肌肉的制備。(2)能量轉換效率低是人工肌肉領域的一個痛點問題。目前,大多數的人工肌肉的能量轉換效率仍然較低,無法與傳統的電機或熱機的能量轉換效率相比。因此發展具有高能量轉換效率的人工肌肉是重要的研究方向。(3)人工肌肉的輸出力小也是限制其實際應用的一個重要的因素。而輸出力的大小又受到人工肌肉的結構以及模量等因素影響,發展大輸出力的人工肌肉是其邁向實際應用的關鍵步驟。(4)人工肌肉的真正應用,是多學科交叉研究后的成果。除了人工肌肉材料的制備外,人工肌肉在智能驅動系統中的裝配,以及相應的驅動精確控制與反饋系統的設計,還需材料與機械工程、信息科學等領域知識的互相交叉融合。在實際的裝配與應用中發現問題,從而對材料設計提出新要求,以催生人工肌肉材料的新發展。
烯碳材料由于自身優異的力學性能、高比表面積、柔性及可加工的特性,可構筑成多維的組裝材料,而突出的電學、熱學和光學性能,又可賦予其組裝材料多功能特性。因此烯碳材料是結構-功能一體化材料的優秀構筑基元。諸如柔性外骨骼、仿真機器人、變翼飛行器等未來先進智能驅動系統的發展,要求人工肌肉除了單一的致動功能外,還需要兼具輕質、柔性等結構特征,并且集傳感、信號傳輸、控制等功能于一體,這進一步激發了多功能驅動的需求。從烯碳材料的結構與性能出發,探索全新的組裝方式,開發具有高效驅動性能的組裝結構,匹配各異的驅動形式與復合材料以尋求最優解,并結合烯碳材料的功能特性,有望設計具有結構-功能-智能一體化的人工肌肉。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
