預測心智的三種理論模型:一個比較性研究
2022-10-26 05:57:58朱林蕃
哲學分析 2022年5期
朱林蕃 劉 闖
一、導論
心智的預測加工(Predictive processing of mind)理論最近十年在國內外學術界產生了深遠的影響。該理論的哲學視角研究者傾向于分析霍威(Jakob Hohwy)為代表的聯結主義預測加工模型(connectionist account of predictive processing)與克拉克(Andy Clark)為代表的具身認知的預測加工模型(embodied predictive processing)之間的理論分歧。概括地說,聯結主義的預測加工模型希望通過多層級預測通路的分析,提出一種建立在貝葉斯預測基礎上的、借助主動推理(active inference)的有限采樣預測模型;而與此相對,具身的預測加工則更加強調身體行動與本體感受對顱內貝葉斯預測的深刻影響,并認同一種基于行動主動性的身體與腦耦合聯動策略的預測模型。與之前的大多數學者不同,本文在試圖比較以上兩種模型合理性之前,加入一個新的視角來分析——筆者認為,在預測加工模型出現之前,福多(Jerry Fodor)與卡拉瑟斯(Peter Carruthers)的心智模塊假說(the modularity of mind)和大規模心智模塊架構(massivemodularity of mind)或已經為人類的預測功能的機制刻畫留出空間,當然也存在著許多不足。基于認知主義的預測模塊策略(cognitivist account of modularity theory of prediction)并不認為感知與認知是密切聯系的,而堅持感知單元與認知的分隔,預測功能存在于中央處理系統中的一個局部模塊等。由于引入新的視角,我們希望通過回顧與理解這種架構的獨特性,以引領我們重新思考預測加工的“史前史”,并幫助解決當今的理論困境。因此,本文的重心在于通過分析認知主義預測模塊策略的優缺點,以及心智的模塊預測策略與聯結主義預測架構的比較分析,來幫助我們進一步理解為何具身認知的預測加工模型超越前面二者,成為解釋人類預測行為的最優模型。
基于這個判斷,本文必須解答如下兩個問題。首先,如果福多與卡拉瑟斯的模塊假說策略可以與預測加工實現兼容,這種兼容可以在多大程度上解釋現有預測加工模型提出的問題;如果不能,我們將分析它的不足之處。其次,我們借鑒對認知主義預測模塊策略的分析,進一步嘗試說明霍威與克拉克兩個版本的預測加工模型中,哪一種更具備有理論說服力。
二、對認知主義心智模塊假說理論的回顧及對預測模塊策略的探索
認知主義(cognitivism)在過去三十年間不斷被各種進路的具身認知理論挑戰,但今天的認知科學理論與相應的哲學解釋仍然不斷在過去的遺產之上進行新的創造。認知主義核心假說,是將人的認知過程等同于中央信息處理過程,那么信息加工之前的信號輸入過程等同于人的感知、信息輸出過程等同于行動——這就等于將人類的感知、認知與行動視作彼此分離的三個單元:認知是二者的信號中介,負責將感知信號通過表征的和計算的方式進行符號計算與句法結構重組,并輸出到行動單元。這種將感知、認知與行動的三分結構被哲學家赫利(Susan Hurley)稱作所謂認知的“經典三明治”(classic sandwich)。
在這個結構的基礎上,福多進一步發展出心智模塊假說。假說基本內容是將一般系統信息加工模式與人類認知系統的信息加工模式進行類比:一個宏觀的系統信息處理過程,可分解為由一系列子系統完成的二級處理過程。這使得人類心智的機制按照模塊化的架構進行解釋。福多版本的心智模塊假說認為人類心智的模塊化存在著一系列特征(properties),比如,心智模塊存在是人類先天的能力與構造,模塊為了使得信息加工得到準確地傳遞而不受到大腦其他部位信號的影響,特定信號必須在經過感知系統輸入之后,在內部系統中被特定心智模塊處理并封裝(encapsulation)傳輸,并在此基礎上進行加工(例如,福多會認為,一個視覺加工過程,不應該受到聽覺信號的影響。視覺信號與聽覺信號之后在中央處理系統中綜合)。從信息封裝的加工過程角度看,它體現了人類心智的信息處理的特征:心智模塊一經接收到感知覺信息單元的刺激或信息輸入,模塊需要進行快速處理,并形成一系列“淺”(shallow)輸出到行動單元(復雜信息會因為需要的計算成本過高而信息過載)。這就是說,心智模塊假說要求信息處理的過程具有強制操作、快速處理和淺輸出特征。從特定功能模塊的處理方式看,模塊處理具有解離性(dissociability)、在地性(localization)和特定領域(domain specific)特征。特定領域與在地性是說,特定感知覺信號只被分配到特定的功能(特定神經)模塊中處理(例如,聽覺信號只會在聽覺單元中處理,視覺信號也只會在視覺單元中處理);而解離性是說,即使心智中某些模塊功能失效(malfunction),并不影響整體模塊的信息處理(例如,色盲患者仍然可以通過模塊處理其他視覺信息)。
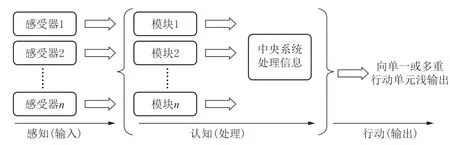
圖1 基于福多心智模塊處理的圖示(括號內為中央處理系統)① Max Coltheart,“Modularity and Cognition”,Trends in Cognitive Sciences,Vol. 3,No. 3,1999,p. 116.
根據上圖所示,福多版本的心智模塊理論不僅具備信息封裝、先天處理、強制操作、快速處理、在地性、解離性、特定領域、中心不可訪問等特征之外,還比較明確地認為感知單元與行動單元在身體系統中,而與感知與行動相互分離的認知單元在顱內的腦與中樞神經系統中。科爾塔特(Max Coltheart)后來在回顧福多的遺產的時候,強調了福多并沒有堅持心智處理需要滿足模塊的“全部”特征,而只需要滿足其中一部分即可。福多在模塊特征問題上的讓步,已經為后福多(post-Fodorian)心智模塊理論提供了改造基礎。
后福多的心智模塊理論的初衷是想解決福多式模型的一些難題,以適應與刻畫大規模心智任務與信息處理的解釋。后來的哲學家與認知科學家對福多版本存在兩個擔憂,一方面,卡拉瑟斯等人認為,不僅邊緣神經(輸入系統)應當采取模塊化解釋,中央處理系統也應當是模塊化的;因為心智系統應該由多個專門系統來組成,而不應采用通用的中央系統,這樣可以更有效和快速地處理信息。另一方面,出于進化心理學的考慮,復雜系統的適應性總是不如多樣化的子系統適應性更強,出于對進化的考慮,子系統(模塊)的進化可以更好的解釋心智在進化中的歷史性過程。
后福多的大規模模塊理論為解釋人類預測問題提供了理論上的可能性。如果福多式的通用中央系統被具體的信息處理模塊取代,那么許多認知科學的理論模型也可以通過模塊化示例來呈現。我們不妨借助下面這個圖來說明那些可能支持模塊假說的認知科學家在試圖解釋人類心智中的預測過程的時候會采用的策 略。通過在上圖中對于認知主義模塊學說對預測加工的可能性觀點的圖示化展示,我們或許可以總結出下面一些特征:
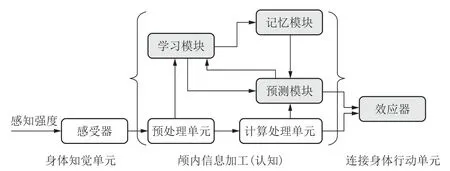
圖2 后福多大規模認知單元對人類預測過程示意圖(括號內為中央處理系統)
(1) 在認知主義預測模塊架構中,不僅感受器、效應器與代表認知加工的中央處理系統分開;認知過程內部的通用中心處理模塊,也被大規模模塊所替代。
(2) 在信息處理過程中,大規模模塊在預處理單元將信息進行區分(即將不同的信息進行分揀,體現了模塊的“特定領域”特征),對待信息處理與傳輸采取“寬域封裝”(wide-scope version of encapsulation)的方式。福多式的窄域封裝本是想說明腦內認知系統的一個信息處理過程完全不被其他腦內子系統的信息干擾。而寬域封裝則盡可能保證一個信息過程不被頭腦中大多數信息影響,但仍然會有一些其他模塊參與到操作中。比如在一個“感知—預測—行動”的信號過程中,學習與記憶模塊可能會將之前已經存儲的知識內容作為預測的前提(例如,“紅燈停”這個規則不需要每次單獨學習和預測,而是借助學習與記憶模塊來處理的)。這一點也被稱作基于模塊的(model-based)策略。
(3) 根據(2)所提示的特征結合圖中所示,預處理單元將信號分別傳輸到兩個主要的信息回路中:A回路組成的無先驗模塊(model-free)策略的回路(空心方框組成)與B回路基于模塊(model-based)回路的學習模塊、記憶模塊與預測模塊(實心方框組成)。
A回路:計算處理單元通過預處理單元直接給定的信息進行封裝加工,并向預測模塊輸出信號并最終輸出大效應器,或者直接以無預測方式向效應器提供簡單加工輸出。
B回路:基于學習與記憶模塊中先驗策略的信息回路在實現信息基本加工后,傳輸信號到預測模塊,并最終輸出到效應器中。B回路中,預測模塊為學習模塊提供部分信息反饋,從而形成預測式知覺滲透。
(4) 預測模塊與正常經過計算加工的信息模塊都可向效應器輸出行動指令。預測單元既可加工“預處理單元”直接給出的信號并發出預測指令(例如,躲避危險),也可以加工經過審慎計算過的復雜信息(計算加工后的行動決策,或者基于學習、記憶模塊的預測行為指令)。
而綜合以上特征,我們或許也可以看到一個“刻板印象中的”認知主義版本預測模塊假說存在的一些問題。首先,上圖所示的認知主義版本的預測加工模型在經過計算處理直接輸出的無模塊化處理與基于學習與記憶的模塊化的處理之間似乎存在兩個輸出路徑,卻沒有說明兩個路徑的信號之間如何通過正負加權從而將運動信號準確地輸出到行動單元。其次,以上模型中缺乏信息反饋回路,以糾正由突發風險事件引發的驚訝(surprise)和認知錯誤(cognitiveerror)。由于以上兩點均在后來的聯結主義的或者具身認知的預測加工理論中得到解決,或許有人會將認知主義模塊學說視作稻草人(strawman)學說而將其簡單化。簡單化的批評對于知識是有害的。因此,我們將在下文說明,在聯結主義與具身認知的預測加工理論出現之前,認知主義者如何在決策加權與反饋回路這兩個層次作出修正努力。
三、認知主義心智模塊對預測模塊策略的深入探索與不足
根據上文我們可以看到,遵循認知主義模塊學說可以對人類心智的預測行為作出初步的探索性與示例性的研究,但是這些研究仍然存在著難以解決的困難,特別是無預測的“感受器—(預處理—計算)—效應器”回路與預測模塊發揮功能的“感受器—[預處理—學習(±記憶)—預測]—效應器”回路之間存在著兩個信號輸出時出現的信號沖突現象,以及在信息處理中缺乏感知信息反饋的難題。不過,也如上文所說,認知主義并不(總)是忽略信號加權與信息反饋的作用。比如弗里斯頓(Karl Friston)在一項研究中重新回顧了認知模塊對于信號加權與評估系統的裝置。在早期的比較器運動編碼研究中,研究者試圖將策略預期反饋與實際感覺反饋進路的信號進行加權處理,并通過這種處理來實現機器手臂模擬人類手臂活動的控制性問題。(見圖3)

圖3 一個早期的基于比較器運動控制編碼研究示意圖。② R. Chris Miall & Daniel M. Wolpert,“Forward Models for Physiological Motor Control”,Neural Networks,Vol. 9,No. 9,1996,p. 1267.
從圖3可見,此版本示例運動指令與指令輸出的內部模塊架構,本模型示例具有以下特點:
(1)內部模塊按照預期回路與感覺現實回路兩個路徑相對獨立傳輸,并在輸出端進行信號差加權。預期回路不受到外部狀態影響,僅反應運動指令信號的預期;而運動、感覺系統回路受到外部信號影響,會產生新的感覺信號。
(2)運動指令同時向運動系統—感覺系統模塊輸出一個現實反饋信號,同時向正向動態模塊輸出副本信號作為感覺預期。兩條信號的加權結果即預期與現實感知的差,差值越高說明預期吻合越少,帶來的認知驚訝越多(風險也就越多),而需要在行動單元花費更多認知能量,使得預期符合運動感覺系統的實際效果,并調整姿態來減少因為意外的外界輸入帶來認知風險。
(3)兩組信號在擬合系統最后作出加權與評估,并最終實現對機器手臂的精準控制。
機器手臂的預測回路與實際感知回路的雙向擬合,與最終信號校準使得認知主義模塊理論中記憶學習模塊中存儲的預測結果,與感知覺反射的信號輸出出現的信號源沖突與誤差問題得到了解決。而福多與卡拉瑟斯或許也會同意信號校準與加權的模塊可以作為認知性預測活動的一部分,即以下面的圖例呈現:
從圖4我們可以看出,在加入信號源校準與加權評估裝置之后,似乎預測行為可以在認知主義模塊學說的范式下得到一種解釋與呈現。不過這種呈現仍然面臨著最近十年來聯結主義的預測加工理論的挑戰。在解釋新的預測加工模型之前,我們不妨稍微總結一下改進后的預測模塊與心智架構理論共同擁有的一些特征與問題。
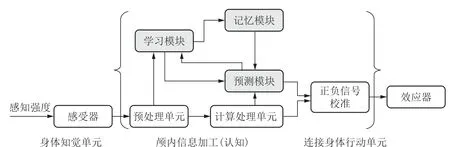
圖4 后福多大規模認知單元對人類預測過程示意圖(改進版)
首先,認知主義版本中的預測模塊策略是一個建立在 “感知—認知—行動”三階段的非連續性(non-continuity claim)基礎上的解釋模型。而聯結主義與具身認知的預測加工模型均試圖挑戰這種“認知三明治”架構,而采取更加連續的方式將感知、認知與行動視作密切相關、互相嵌套的層次的認知架構。
其次,大規模認知模塊假說采取了內部功能單元分離(isolation claim)的認知架構,這種架構基于一種假設,即人類大腦新皮層是嚴格按照功能分區而分布的。而自從認知神經科學的全局工作空間理論(Global workspace theory)出現以來,許多科學家認為,人的決策、注意力、評估等認知活動是一種全局可用性(globally available)的組織方式,任何一個顱內信息處理都會調用神經空間內相當部分的腦資源,而不僅僅是單一的本地模塊(local model)。顯然,在后來的聯結主義預測加工模型中,這一點也成了其理論的重要內容。
最后卻并非不重要的一點,在認知主義策略下的預測模塊體現了一種依賴于被動的感知輸入的模型,這種模型必須渴求外界輸入的感知強度(perceived intensity)作為先天條件。而后來的聯結主義或具身認知的預測加工模型則認為人的預測是一個主動與被動相結合的加工過程。
綜上,我們可以看出,認知主義的心智模塊學說在人類的預測行為方面確實作出了許多探索,但是仍然存在著上面三個似乎無法回避的爭論點。我們在下一節將著重討論聯結主義與具身認知預測加工模型的形式與這三個關鍵爭議的答案。
四、聯結主義與具身認知預測加工模型對認知主義預測模塊的超越
在過去十年間,基于弗里斯頓最先提出的將人類預測行為與多層級神經結構與貝葉斯算法相結合的神經科學假設,霍威與克拉克分別提出了不同版本的預測加工模型。霍威傾向于作出一個聯結主義版本的預測加工解釋,而克拉克則從具身認知背景提出了具身認知版本的解釋。本節我們將對這兩個不同視角的解釋分別作出分析與介紹。
(一) 聯結主義預測加工模型
霍威的聯結主義預測加工是基于弗里斯頓和弗里斯(Chris Frith)等神經科學基礎上的認知科學詮釋。在霍威看來,預測加工是一種基于腦全局工作的亞人格層面(sub-personallevel)的貝葉斯推理預測過程。由于這種推理過程僅僅關于無意識推理決策,而不是理性化的推理決策,因而并不涉及現象學意識層級的體驗,而這種無意識的貝葉斯推理過程在多層級神經系統中起作用。我們將從以下四個側面解釋聯結主義的加工模型結構。
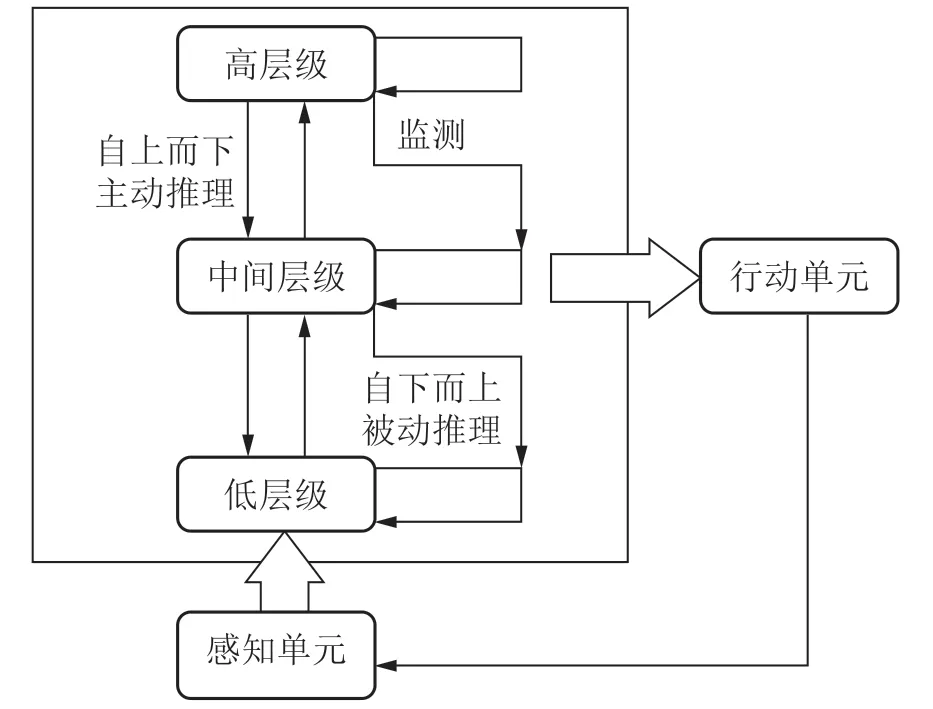
圖5 聯結主義預測加工模型示意圖(略修改)① Jakob Hohwy,The Predictive Mind,Oxford: Oxford University Press,2014,p. 68.
(1) 預測加工的動力:自我保存意圖下的主動預測。
依照弗里斯頓的解釋,生物體可以被看作由皮膚或細胞膜包裹的內穩態(homeostasis)系統,而任何孤立系統都會遵守熱力學第二定律自發且持續地耗散能量,并最終由于熱量耗散完成,達到熱力學平衡而系統崩解,能量在環境中平衡;因而,生命系統具有生存意圖,并維持能量不會快速耗散。生存意圖使得生命系統通過不斷對感受器采樣內容進行預測,所預測內容與感知采樣內容誤差越小,規避可能出現的意外與風險的時間與機會越大。
(2) 預測加工的中心與目的:追尋預測錯誤最小化的“貝葉斯腦”。
既然生物為了保存自身而需要規避風險,生命系統需要對所處環境的情況作出預測,預測結果與真實情況的差別越小,那么說明該系統有更多時間和能力規避這些風險,從而使得維持系統生存的可能性就越大。所以,生命系統的心智過程包含著努力追求預測錯誤最小化(predictive error minimization)的過程。
而追求預測錯誤最小化需要大腦不斷借助貝葉斯推斷(Bayesian inference)來對感知覺單元向腦內輸入的信號進行采樣,并將采樣結果與內部信念的先驗信念進行計算整合,并推測出關于未來事件發生的可能性概率。所有支持預測加工理論的學者幾乎都支持人類的腦是一個關于外部事件不斷預測的貝葉斯“引擎”。
(3) 預測加工的架構:主被動結合的多層級聯結主義。
霍威預測加工模型還借鑒了聯結主義神經元多層級架構作為預測加工架構的靈感來源,在他看來,人類神經網絡中存在多層級的信息處理,上一級對下一級按照先驗信念概率進行主動推理(active inference),與自下向上的后驗概率信號輸入被動推理(passive inference)的相遇,在任一層級內部產生相應的貝葉斯概率推斷,并將推斷結果作為下一層推斷采樣的依據。這樣上下信號相遇產生的預測結果不斷與外部感知覺輸入的信號相遇,為了符合預測誤差最小化,各層級會不斷調整輸入(平衡主動和被動信號)的權重(增強準確的信號精度、抑制干擾),使得預測結果與外部即時發生的事件的情況不斷接近,為規避風險的行動提供可能性。
(4) 預測加工的物理實現:自證邊界的內部實現。
既然每一層級都基于對下一層級的采樣,且采樣的基礎又是基于感知覺的信號輸入,這樣一來,似乎采樣的根據總是處在感知覺單元與預測處理分隔的邊界之上。如果貝葉斯推斷中的采樣內容都是神經內部的,那么在這些內部計算之外的步驟是(預測)邊界之外的。而在現實中,這個預測的采樣邊界“恰好”與腦的生理邊界重合,這樣一來,霍威認為,心智的預測加工是一個以腦為邊界的內部活動,邊界的位置是通過預測過程的內部性而得到自證的。
霍威的預測版本整體上認為預測加工處理并不是腦局部功能區或者模塊的作用,而是全腦多層級活動的共同結果,但是他仍然堅持認為認知單元與感知覺單元、行動單元互相分離。而在主動性立場上,霍威強調了自上而下的主動推理與自下而上的被動推理互相結合,但是他并沒有說明行動對于采樣或者行動者主體的更深層的影響。
(二) 克拉克的具身認知的預測加工:對霍威的批評 。
克拉克的具身認知版本的預測加工基本上認同霍威的整體結構,即關于預測錯誤最小化、貝葉斯推斷和多層級預測加工架構的模型。但是在如上觀點之外,克拉克堅持一種具身認知立場下的預測加工模式,即預測加工的過程不應當被理解為顱內狹義的貝葉斯推斷過程,而是應當考慮人與環境的廣義語境下,本體感受(proprioception)和行動對貝葉斯預測的深刻影響,也就是說,將身體與行動對內部推斷的影響非中介化了。
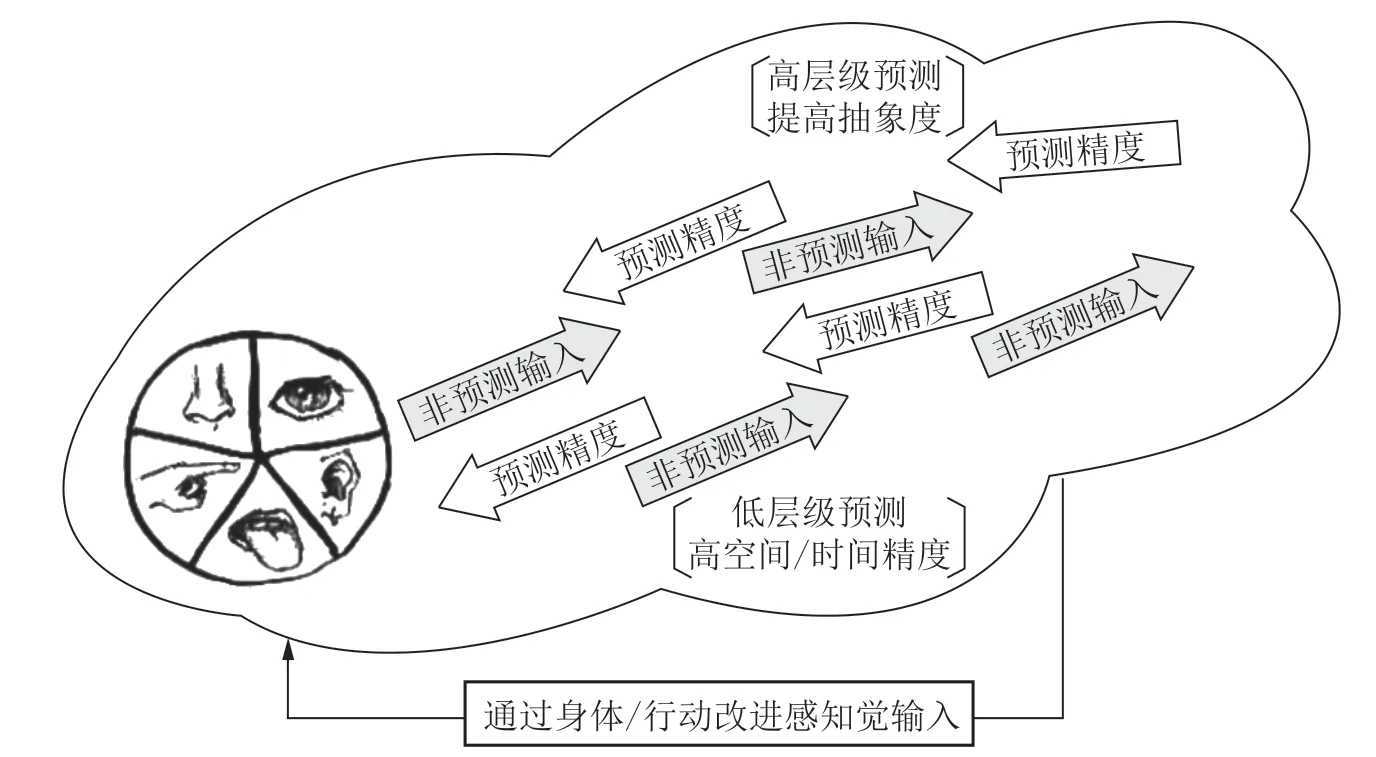
圖6 基于身體/行動的廣義貝葉斯預測模型(略修改)① Andy Clark,Surfing Uncertainty: Prediction,Action,and the Embodied Mind,Oxford: Oxford University Press,2015,p. 284.
克拉克的架構與霍威的差別主要體現在下面四個不同的角度。首先,克拉克認為,感知與行動對于預測的影響是深刻和連續的。在他看來,主動推理并不僅僅是一個顱內高層級指向低層級的信號指向活動,而是借助內部神經過程與外部復雜的知覺/行動系統(五官感受與本體感受)的雙重策略。通過“改變環境適應預測,改變預測適應環境”的方式來獲得最經濟和有效的預測推斷。在這個意義上看,感知覺與行動直接“介入”(embed)到了預測的全過程中。
其次,經由行動積極地縮小誤差的策略在霍威的模型中并沒有得到重視。在克拉克看來,人類(或某些動物或者智能機器人)可以經過學習從而使本體感受可以策動和實現身體行動,最終通過移動身體和觀察角度的遷移達到縮小預測誤差的目的。而之所以身體行動介入預測過程而不是全部依賴于神經活動,是因為生命體的生存優勢與進化優勢在于使用最小的能量獲得最大的效益,即認知經濟學(cognitive economy)。生命體需要在時間壓力下作出最優判斷的時候,具身行動(embodied action)的介入使減小預測誤差和實現認知目標顯得直接和高效起來。
再次,當主體具身行動成為預測與所在環境之間介入因素的時候,在克拉克看來,在貝葉斯推斷的過程中,感知與行動不再是預測過程之外的部分,而是被納入“廣義貝葉斯”的過程中。由于每一次貝葉斯推斷的過程,不僅僅包含著先驗信念與感知覺信號采樣本身,也包含著認知主體如何通過行動改變自身狀況來改變采樣精度符合預測的結果(比如通過登高望遠凝視遠方獲得準確的預測,或者對交通工具有了解的人,將對面好像是車的東西預測為汽車,提前做出躲開的動作以便在相遇的時候更容易作出反應)。又或者說,包含著另一種策略,即通過改變環境來讓環境符合我們的預測(為了看得更遠、觀察更清晰,走上樓梯或者摞起磚塊踩上去,等等)。
最后,霍威的內在主義版本往往忽略人類已經存在著的語言與文化因素對于預測的影響,因為其內在主義的特點,知覺到的內容也僅僅是與世界的偶然符合(感知內容受制于采樣的方式)。而克拉克堅持認為,預測加工必然伴隨著真實世界的認知策略,即人的預測加工被我們自身的語言與文化因素塑造著,而我們又通過歷史文化實踐塑造和生成了關于世界中(對我們發揮作用的)的因素。社會規則、社群文化、習俗和禁忌等作為我們預測推斷時業已存在的先驗信念,會影響到預測精度和最終的行為方式。
五、對三種預測模型的哲學再分析
最近幾年,德萊森(Zoe Drayson)等后福多心智模塊論擁護者在支持心智模塊假說兼容某種預測模型的時候,堅持認為:(1)預測或者其他任何認知活動都是在內部神經的局部(模塊)完成的;(2)感知、認知與行動單元之間彼此互相隔離;(3)預測活動必須依賴被動性的信息給予后的反應,和其他認知活動一樣,預測是被動的,感知之后的。
與此相對,聯結主義與具身認知的預測加工理論支持全局加工理論,認為預測活動并不發生在某一單元中,而是全腦神經元的共同作用的結果。但是在感知、認知與行動分離的立場上,霍威的聯結主義雖然部分認為行動對預測有積極效果,但是仍認為預測過程是一個顱內加工的過程,狹義的貝葉斯推理邊界就是腦邊界,與身體無關。而克拉克則立場更加徹底,認為預測加工和所有人的認知活動均是具身的過程。身體與行動不僅深刻影響認知的內容,也積極參與構建了認知的形態與全過程。
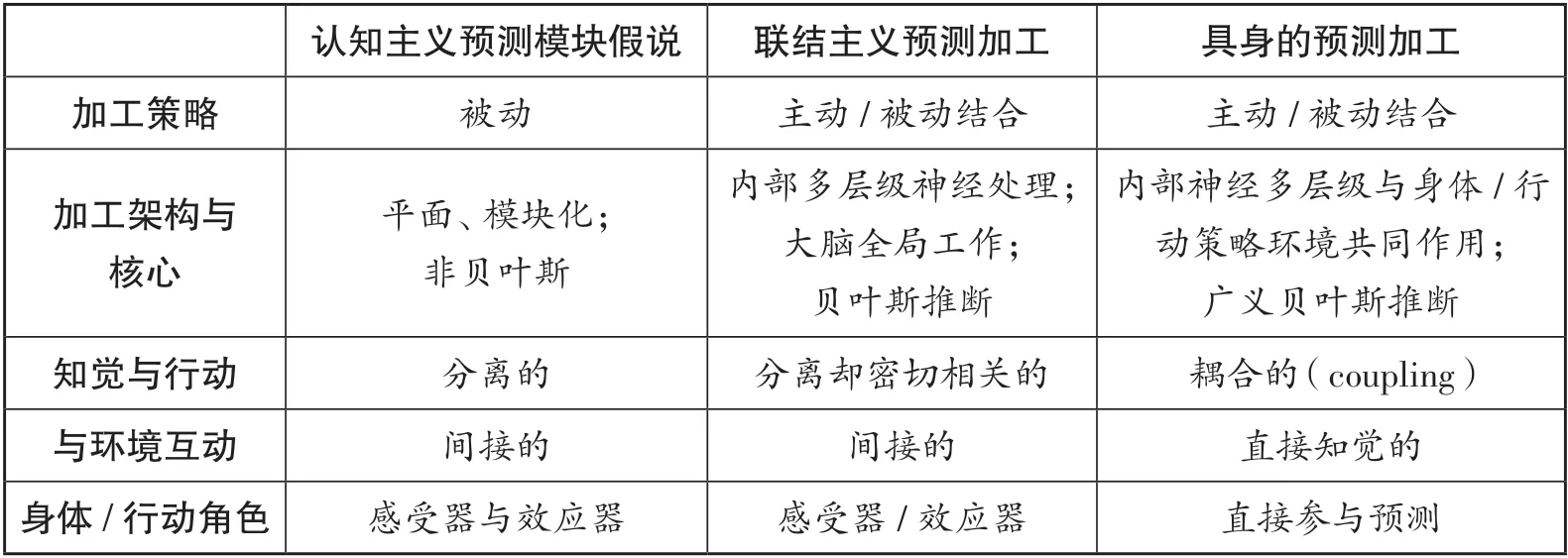
表1 三種預測加工模式的差異示意圖
無論上面哪種理論模型正確,似乎三種理論最終走到了一個待選或待驗證的平臺之上,哲學家們除了高聲援引亥姆霍茨(Hermann von Helmholtz)或康德與當代理論的相似性之外,似乎顯得束手無策,唯有等待科學家(比如弗里斯頓等)的驗證才能最終定論。但實際上并不盡然,我們不妨在下文嘗試從簡單到復雜,作進一步的哲學分析。
首先,反駁關于認知的被動性假說。經典認知主義習慣性地將認知過程理解(或設計)為被動,一方面基于“刺激—反應”的行為主義心理學假說,另一方面是因為表征主義訴求,即只有關于外部的刺激或感知壓力(perceived intensities)才有關于外部世界的表征。這樣一來,感知單元(感受器)就被視作認知單元的被動從屬。將感知視作被動也承載了某種理論的“歷史負擔”,例如阿奎那也說過“感知不是動,是被動(to be moved)”。不過,將人的身體感知系統也描繪成被動從屬,集大成者還是近代機械論和行為主義,既然人是機器或刺激反應對象,那么感知自然也被賦予了被動的屬性,這種刻畫易于分析卻十分違背日常直覺。諾伊(Alva No?)曾經舉過一個例子,當我們看到柵欄后好像有一只貓,但因為柵欄的遮擋,我們僅僅看到部分貓的形象。大多數人當然不會僅靠猜想說那是一只貓,而是憑借感覺運動能力(sensorimotor capacity),通過視覺移動和身體動作看到對象。人類的認知顯然從出生就具有某種先天的主動策略與能力,并在后天環境中強化或抑制這些策略。或許從覓食反射(rooting reflex)例子中可以得到說明:新生兒(1—120天)在唇角接受到皮膚碰觸后,會先天地產生轉動嘴唇尋覓最佳哺乳角度的行為。在這個過程中的舊解釋中,引發的刺激是外部的,且反射是一個應激行為;但是,從預測加工的視角看,由于人類的先天策略中保留著主動性與內置的傾向性,新生兒可以將碰觸嘴唇及其鄰近區域的物體判斷為食物來源,這使得他們可以主動做出唇角追覓哺乳的動作;唇角追覓事物的動作并不應僅僅解釋為一種刺激—反射機制,而是包含著復雜的身體反饋背后的主動預測機制。或許正是生命系統具有的這種主動傾向性和能力,使得我們具有了追尋事物的行為,并使得我們可以在外部世界主動地從環境中尋找和獲取有利的生存條件。
其次,反駁關于感知、認知與行動的分離假說。經典認知主義模型將感知、認知與行動分離,它不僅僅依賴上面所說的感知被動依附于認知,便于解釋認知單元的表征過程,更深層次地說,這種感知、認知、行動的分野很大程度和該理論大量借鑒通用編碼理論(common coding theory)有關。在這種理論模型中,感知即輸入、認知即信息處理、行動即輸出;行動需要認知單元將感知信號進行表征處理。但這種模型在最近三十年的具身認知理論發展中被不斷挑戰。具身認知模型的支持者認為,感知、認知與行動并不是簡單的線性因果關系,而是一個動態的纏繞過程。赫利認為感覺、認知與行動處在統一平臺上動態協作,或者諾伊支持依賴感覺運動能力在行動中知覺到世界,或者克拉克認為的主體的認知是與環境的密切組成的耦合系統,但無論哪一種模型都反對將認知與身體的感知與行動割裂開。我們不妨提供一個最低版本的支持連貫模型的解釋。一個沉思者或許真的不需要借助行動和感知外部環境來思考,但在絕大多數生活場景中,人的預測,乃至全部認知活動總是處在一個與環境動態交互的狀態和場景中。例如,一個靈活奔跑的運動員通過腦激活了腿與足部的大量神經感知,而對上肢很少感知與注意,似乎腿部參與控球預測的程度遠大于上肢;在一些極端版本中(比如阿爾茲海默癥患者與他的記事本),研究者會認為主體會將腦的部分功能與外界環境中的工具或設備整合在一起,形成高效的認知回路;他們或認為這些外部設備也部分地參與了認知過程與預測過程。在這些比較性的例子中,我們或許可以看到,感知與行動時刻構造著人的認知過程(和范圍),并影響著預測過程。甚至在一些案例中,認知的邊界會隨著認知任務的不同而變得可塑(擴大或收縮)。以上的案例至少說明分離假說對人的大多數認知現象的解釋是非常刻板和靜態的——沒有考慮到扶手椅思考之外的真實生活認知場景中的認知現象;而連貫假說看起來更符合我們現有的理論直覺。
最后,反駁關于腦局部模塊的假說。全局加工理論與心智模塊假說得到啟發的背景略顯不同。心智模塊假說的背景是試圖理解不同認知任務背后的機制,且這個機制必須以信息封裝與模塊化處理的方式,將外界環境信號表征為輸出信號的方式。這種理解仍然是基于通用編碼理論和馮諾依曼的問題解決機(problem-solver)的。而全局加工理論并不試圖解決問題或者解釋認知功能,它的旨趣在于理解和發現人的意識與意識的活動機制。這就是說,全局加工理論是否能夠反駁心智模塊假說的關鍵或許真的是一個向未來開放的科學證實的問題,而不是純粹哲學的問題(雖然依照今天的科學進展來看,似乎全局加工理論更加合理)。
六、總結性討論
本文回顧與比較了人類心智理論中三個典型理論,即基于預測模塊的認知主義策略、聯結主義預測加工模型與具身認知的預測加工模型,我們或許可以看到不同的理論策略或模型采取的認知尺度略有不同。認知主義的預測模塊策略基于“經典三明治”理論背景,關注人類認知架構中內部化、水平化的信息加工與處理過程。這個策略雖然在微觀尺度上可以模擬人的信息加工機制,或者模擬人的某種認知行為和現象(比如我們在第二節舉例說明的,模擬人類機制的機械手臂感受比較器),可一旦我們將預測行為的尺度放大到“人與環境”這個層面,似乎這種解釋策略就略顯不足。因而,在這個基礎上我們指出,由于堅持感知、認知與行動的分離,以及被動模型的方式,認知主義不能滿足解釋人類的預測行為。
而與此相對,聯結主義提出了一個改進型策略,它采用了全局意識假說下的多層級貝葉斯推斷架構。這個架構解決了預測校準機制不明確和信息處理結構單一的問題,但是仍然忽略了身體與行動、本體感受的作用——預測加工似乎受困于身心分離(disembodied)理論的束縛。
最后,具身認知立場的預測加工模型最主要的貢獻或許在于,克拉克等人將預測行為的解釋尺度從以腦為中心(brain-centered),放大到“人—世界”(personworld)。這不僅在認知架構上將感知與行動都納入“廣義貝葉斯計算”的考慮中(雖然細節機制仍然有待解釋),而且,由于本體感受的驅動,具身的預測機制與世界獲得了直接的聯系。當然,本文并不想獨斷地宣稱具身的預測加工一定準確地刻畫了人的預測活動,但至少我們通過比較與回顧的方式展示出了一種理論解釋上的最大可能性,并期待未來更多科學與哲學的新發現,以便同領域的學者們可以共同推進預測加工模型的研究,破解人類心智之謎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
鴨綠江(2021年35期)2021-04-19 12:24:18
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42