基于紅外傳感器的智能大棚內的田鼠捕獲裝置的設計與實現
2022-10-26 11:28:48李浩偉吳立哲吳修權高樹偉張遠軍
科學技術創新 2022年29期
李浩偉,吳立哲,吳修權*,金 航,高樹偉,張遠軍
(1.山東農業工程學院,山東 淄博 255000;2.聊城大學,山東 聊城 252000;3.山東交通學院,山東 濟南 250000;4.臨沂大學,山東 臨沂 276000)
1 系統總體設計
本設備整體設計思路框圖見圖1。
基于紅外傳感器的智能大棚內的田鼠捕獲裝置主要是由觸發器功能電路,紅外傳感模塊,警示燈處理模塊,電源模塊等組成。電源模塊[1]由電池組進行供電,成本低,效率高。紅外測距模塊通過檢測田鼠等生物的進入并作出響應,通過繼電器模塊閉合閘門,完成捕獲田鼠的操作。通過零件之間相互配合,完成裝置的閘門開合過程,觸發器信號電路接收來自紅外處理模塊所給予的信號,通過雙J-K 觸發器負邊沿觸發,通過邏輯電路控制閘門的開合,最后完成捕獲鼠類的工作,警示燈提醒說明操作完成。
2 裝置結構設計
2.1 紅外線測距感應裝置
AS312 型號智能紅外傳感器模塊能通過檢測生物的進入,同時給予中央處理器信號,通過信號的反饋,控制鐵籠的上升和下降,用來達到捕鼠的效果。原理是通過局部的信號作用,通過紅外線測距模塊發出測距信號,使用3 mm 紅外線發射管,最大正向電流為30 mA,反向耐壓值為6 V,最大功耗可到達80 mW,最大工作溫度在-25 ℃到70℃,通過采用三極管放大電路以及運算放大器的配合電路設計,是該模塊的可檢測波長在大大提高,通過配置電位器來時模塊具有數字和模擬輸出信號。
2.2 電池放電模塊
電池放電模塊[2]由單排電池組構成,配有電池充電保護模塊,電池組放電迅速,便于回收。背部的電池保護模塊能夠防止電流過載,電池組充電完成自動斷電,電壓穩定在5 v 左右,性能穩定,成本較低,對于機械設施控制系統的電壓容錯率較高,能夠獨立完成機械結構與觸發器的分別供電[3]。
2.3 特殊類型的機械結構
本項目采用了舵機聯合伸縮桿進行開關閘門的機械結構,對于閘門的開關閉合可以通過按鍵開關以及觸發傳感器的方式進行控制,當觸發器發出高電平信號時,舵機啟動控制連軸底座旋轉,進而調整伸縮桿方向的變化,伸縮桿末端連有閘門頂端,通過不同方向的伸縮桿平移變化,帶動閘門進行上升和下降。舵機選型為180°旋轉45 kg 的同軸機型,對機體本身容錯率較高,帶動重物時震蕩率低,能夠穩定的發揮其效能,帶動閘門穩定開啟和關閉。
2.4 控制模塊
2.4.1 觸發器功能和特點[4]
觸發器是能夠記憶一位二進制信號0 或1 的基本邏輯器件,把若干個觸發器組合在一起便可以記憶多位二進制信號。為了實現這種記憶的功能,觸發器應具有兩種能自保持的穩定狀態來記憶0 或1 兩種邏輯狀態。如Q=0、Q=1 表示0 狀態,記作Q=0、Q=1、Q=0 表示1 狀態,記作Q=1。
所有觸發器都具備以下兩個工作特性:
(1) 具有兩個穩定狀態(1 態或0 態),在一定的條件下,可保持在一個狀態下不變。
(2) 在一定的外加信號作用下,觸發器可從一種穩態轉變到另一種穩態。
根據功能不同,觸發器可分為:基本RS 觸發器;RS 觸發器;JK 觸發器;D 觸發器;T 觸發器;T 觸發器。根據觸發方式不同,觸發器可分為:電平觸發器;主從觸發器和邊沿觸發器。根據電路結構的不同,觸發器可分為:基本RS 觸發器;同步觸發器;主從觸發器和邊沿觸發器。
2.4.2 觸發器功能選擇以及原理介紹
采用雙J-K 負邊沿觸發型芯片74LS112 功能芯片,在輸入信號為雙端的情況下,JK 觸發器是功能完善、使用靈活和通用性較強的一種觸發器。
(1) 當J=0,K=0 時,觸發器維持原狀態,Qn+ 1=Dn。
(2) 當J=0,K=1 時,不管觸發器的原狀態如何,CP 作用(下降沿)后,觸發器總是處于“0”狀態,Qn+1=0 。
(3) 當J=1,K=0 時,不管觸發器原狀態如何,CP作用后,觸發器總是處于“1”狀態,Qn+1=1。
(4) 當J=1,K=1 時,不管觸發器原狀態如何,CP作用后,觸發器的狀態都要翻轉,Qn+1=Qn。
本系統選用雙J-K 負邊沿觸發器74LS112 芯片進行電路設計,其邏輯符號見圖2,芯片功能原理圖見圖3。
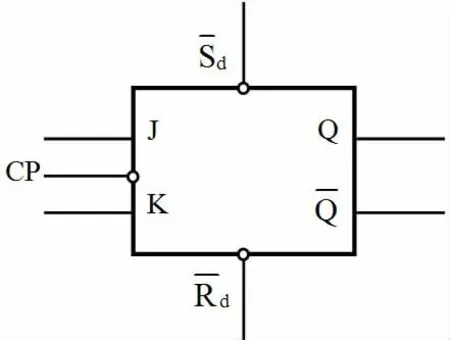
圖2 74LS112 邏輯符號圖
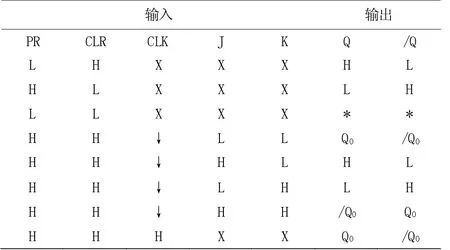
圖3 74LS112 芯片功能原理圖
具體結構見圖4、圖5。

圖4 效果展示圖1
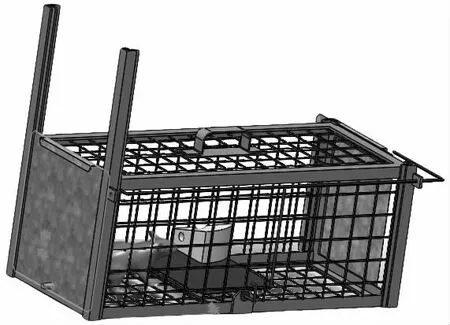
圖5 效果展示圖2
當田鼠[5]看到籠中的食物,會試探性地對周圍環境進行危害性檢測,田鼠在進入籠中初,觸碰到紅外測距感應開關,系統將數據傳送給中央處理器,但并不執行關籠操作,當田鼠放松警惕,進入籠中覓食時,觸碰到靠近食物近端的紅外傳感器模塊,中央處理器會發出信號,控制籠子關閉,從而束縛住田鼠,完成捕鼠操作。
如上圖所示在捕鼠器內放置誘餌,P1、P2 為兩個紅外檢測傳感器,S 為閘門。當老鼠進入捕鼠器進食時通過P1 閘門不動作,當到達P2 位置時閘門S 關閉。當紅外檢測到老鼠時P1、P2 輸出高電平,沒有老鼠時保持低電平。閘門開關S 默認輸出低電平,閘門不閉合。當S 輸出高電平時閘門閉合。
即:
(1) 當P1、P2 都為低電平時,說明沒有老鼠,輸出S 為低電平,閘門不關閉。
(2) 當P1 為高電平,P2 為低電平時,說明老鼠進入閘門,此時輸出S 為低電平,閘門不關閉。
(3) 當P1 為低電平、P2 為高電平時,說明老鼠已經進入正在覓食,此時輸出S 為高電平,閘門關閉。
(4) 當P1、P2 都為高電平時,說明有多只老鼠同時進入,此時輸出S 為高電平,閘門關閉。
其程序流程圖見圖6。
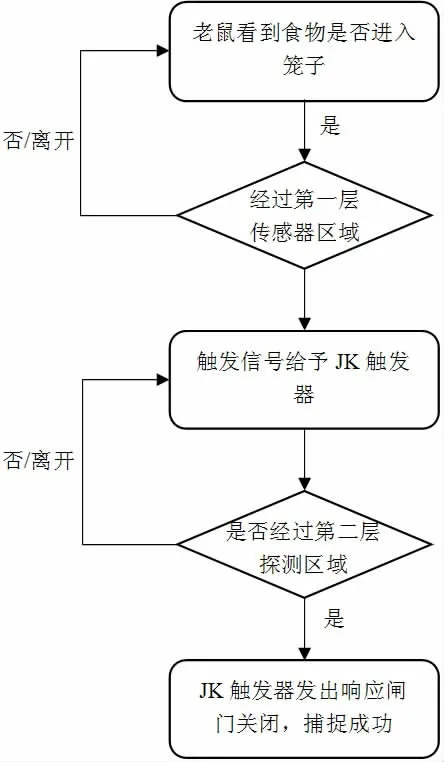
圖6 程序流程
根據系統設計方案可以得到大棚多點溫度采集溫控系統的真值表(見表1)、卡諾圖表(見表2)。
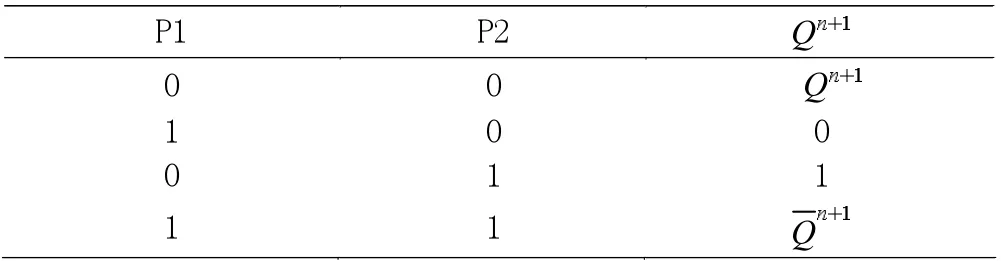
表1 系統真值表
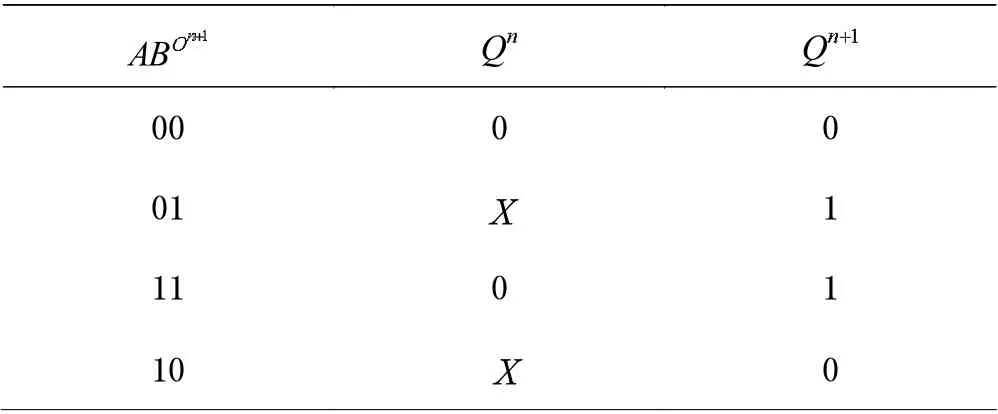
表2 系統卡諾圖表
如圖7 所示,將電路中的SD 與RD 接口置1,同時CP 為下降沿有效,設A 為第一個紅外傳感器的傳輸信號(默認狀態為低電平),B 為第二個傳感器的傳輸信號(默認狀態低電平),將A、B 分別接入到K、J 觸發器上,當老鼠觸碰到第一個傳感器時轉換為高電平,如果不再繼續前行則保持閘門開啟,如果觸碰到第二個傳感器則B 信號為高電平,閘門關閉,完成捕捉動作。
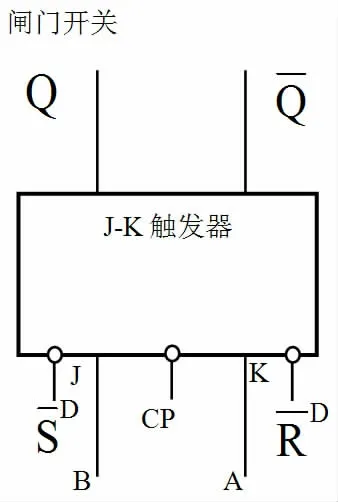
圖7 邏輯電路圖
根據圖8 的波形實現圖所示,在SLK/CP 時鐘的映射下,觸發器下降沿有效,在J 觸發/K 觸發關閉的情況下置一,在單獨K 觸發的情況下輸出并不發生變化,而雙觸發器同時工作的情況下輸出會在原來的狀態下進入反轉,改變原來的輸出狀態,本產品利用雙JK 觸發器的原理進行捕鼠操作,在與或門的配合下完成機械結構的配合,從而實現紅外測距的實現和籠門關閉。
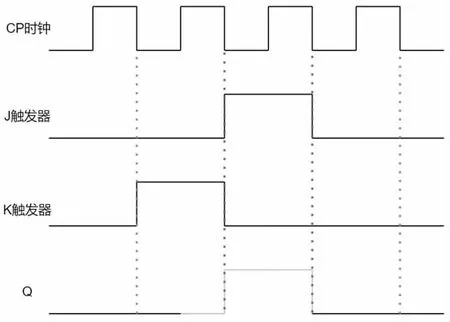
圖8 電路波形實現圖
3 產品優勢對比
根據市場調研,我們從市場上了解到了幾種現有的智能捕鼠設施,發現大多數捕鼠設施多采用單片機控制,將其與我們的產品進行了性能與產品優勢上的對比,見表3。
如表3 所示,各類捕鼠設施在產品特性方面大相庭徑,但在基礎功能的實施上并不存在過多的差異,較單片機型捕鼠器,雙JK 觸發器型捕鼠設施在靈活性和適用度方面較為親民,能夠大面積普遍推廣,經濟適用度較高,能夠在糧食生產領域得到廣泛的應用和推廣。
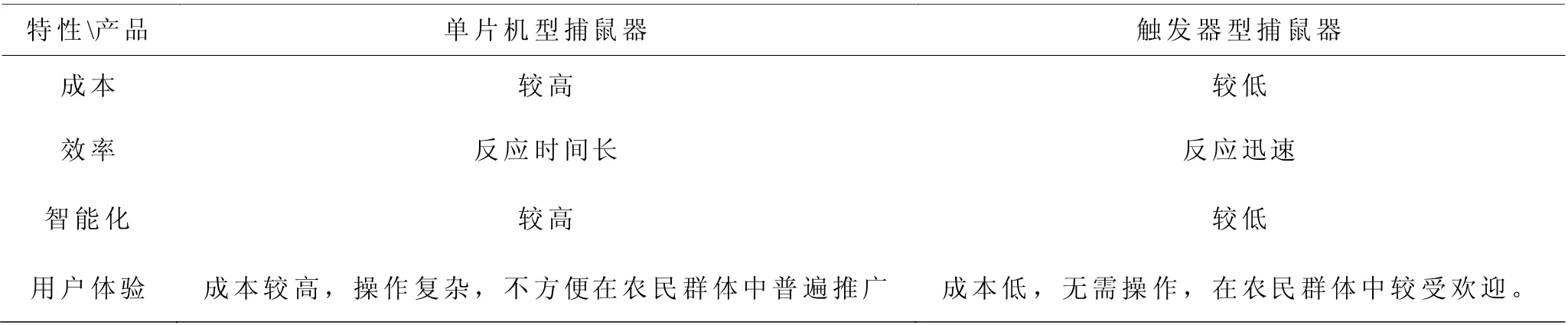
表3 產品優勢對比
在未來設想上,我們計劃用JK 觸發器以及D 觸發器聯合使用,同時使用三個紅外傳感器,相互配合完成捕捉多只老鼠的工作。其概念圖見圖10。
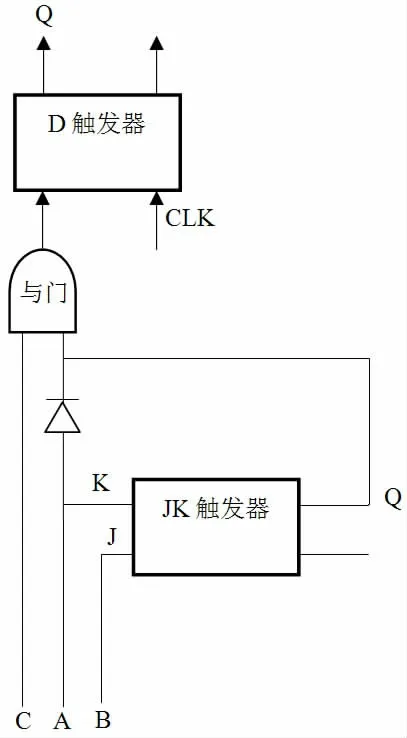
圖10 概念圖
4 產品概念模型
該系統采用反饋控制的基本控制方式,類似于龍門刨床速度檢測的自動控制過程(系統控制方塊圖如圖9 所示),在基本組成上分為測量元件、給定元件、比較元件以及放大元件。
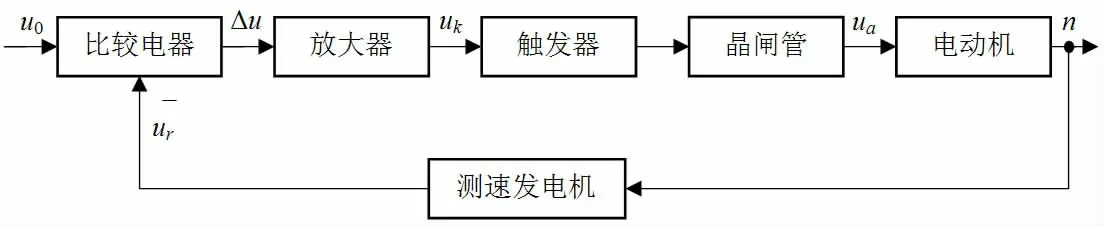
圖9 龍門刨床系統控制圖
在系統控制圖的前向通路部分,由觸發電路、放大器、觸發器等控制元件對被控對象進行對被測量的變化負責,而主反饋通路用于測量被控量的“偏差”作用,對偏移量直接測量并返回給比較電路,由被測量初始值和偏差值進行對比,返回偏移量作用于被控對象上,進行實時更新被控量。
當然,我們應該指出,本系統和龍門刨床系統在原理上也類似,都屬于有靜差系統,在系統正常運作的前提下,允許紅外檢測裝置的速度反饋存在穩態誤差。
按反饋控制方式進行的組成的反饋控制系統,能夠抑制內外擾動對被控量影響的能力,有較高的控制精度。但是此類系統采用的元件多,控制復雜,特別是系統的性能分析和設計也較為麻煩。
5 實際產品模型
由于龍門刨床系統在運行時采用單次反饋,并不能很好的實現本項目的功能。所以在實際的大棚捕鼠系統采用了內回路和主反饋通路并行的結構,在測量元件(紅外傳感裝置)檢測到有老鼠通過時,會傳輸單次偏移量給予與門存儲,當接近食物或者多只老鼠進入籠中時,第二觸發器發揮作用,閘門關閉,完成捕捉。龍門創床與大棚捕鼠裝置適用性對比見表4。

表4 龍門創床與大棚捕鼠裝置適用性對比
圖10 中的A、B、C 分別對應著紅外傳感器的位置關系(由外向內),當有多只老鼠進入時,機器閘門并不會關閉,當老鼠吃完奶酪進行回程時,閘門關閉,封鎖住了老鼠的路線,最終捕捉到多只老鼠。
6 產品未來展望
6.1 控制方式精準化
在閉環反饋控制方式的基礎上,加上基于電流擾動測量的開環測量,且保證電路有且僅有單個擾動因素作為補償,對其他擾動均不起補償作用,在此情況下,系統中的主要擾動已被補償,其余的反饋控制部分也比較容易設計;復合控制方式的精度高且穩態誤差小,適合用于高精度檢測儀器中的反饋。
6.2 控制智能化
在現有電路的基礎上,設計以STM32F4XX 為內核的單片機控制系統,采用TCR 系列紅外對管檢測模塊,遵循IIC 協議,可以主動發射紅外線探測,因此目標的反射率和形狀是探測距離的關鍵。其中黑色探測距離最小,白色最大;小面積物體距離小,大面積距離大。(反射面平整、顏色淺的物體反射距離遠,感應的靈敏度也高;反射面凹凸不平,顏色越深的物體反射感應距離和靈敏度會下降);同時設置看門狗和低功耗,使設備在沒有外部中斷的作用時處于睡眠狀態,看門狗用于防止設備在中斷內部運行時發生錯誤,迅速重啟設備不影響消費者使用。
6.3 后備電力能源供應
光伏發電板效率低下,成本高且穩定性差,受天氣影響較大。在光伏電池板電力即將耗盡時,迅速切換到帶有電池保護功能的蓄電池組,代替光伏供電版進行供電。蓄電池組容量儲備較大,能幫助設備更好的匹配環境。
