差分進化算法在陣風響應減緩控制中的應用
2022-10-29 03:32:32陳世康楊士斌孫曉哲
航空科學技術 2022年10期
關鍵詞:模型
陳世康,楊士斌,孫曉哲
中國民航大學,天津 300300
飛機在飛行過程中不可避免地會受到陣風的影響,這會干擾飛行員的正常操作,降低乘客的乘坐品質。在更嚴重的情況下,飛行任務無法完成,更可能影響飛行安全。陣風可以被視為飛機的外部激振器,它不僅會引起剛性運動的變化,還會引起彈性振動,并導致額外的氣動彈性響應。一方面,人體對低頻振動(1Hz左右)非常敏感[1],因此陣風引起的加速度響應可能會嚴重惡化乘客的乘坐品質;另一方面,帶來額外的陣風載荷,可能會縮短結構的疲勞壽命[2-3]。陣風載荷過大會對飛機造成很嚴重的問題,所以在飛機設計過程中,陣風減緩一直是一個重要且亟待解決的問題。
陣風響應減緩可通過傳感器感受運動特征,如速度、加速度、氣動力等,并通過設計的控制律來驅動位于副翼的作動器,改變副翼的角度從而改善飛機性能。目前,國內外有很多學者研究控制并進行了很多的試驗去驗證,芮俊俊等[4]通過此最優控制器和H∞控制器針對二維翼段陣風載荷進行控制并進行試驗驗證。傅軍等[5]基于現代魯棒控制理論對彈性飛機進行陣風載荷減緩。陸勤等[6]采用H∞狀態反饋控制對飛機進行陣風響應減緩。Wu Zhigang等[7]針對大展弦比機翼的大型客機提出三種采用PⅠD控制的陣風減緩控制方案并在風洞試驗中進行驗證。張紅波等[8]在控制增穩系統的基礎上對引入副翼對稱偏轉進行陣風減緩的可行性進行了仿真與分析。Dai Yuting等[9]設計了一種用于減緩陣風響應的廣義預測控制律,并在飛機模型上進行了仿真。然而,對于控制參數的選取,大多數是基于工程實際經驗進行參數整定的,其不易于得到最優解且效率低下,需要手動反復迭代運算。所以,智能算法與傳統控制相結合的方法體現出了不可代替的優勢。差分進化算法(DE)于1995 年由Storn 和Price 提出,是一種基于群體的自適應全局優化算法,具有算法效率高、易操作、簡單通用、收斂快速及魯棒性強等特點[10]。因此將差分進化算法與控制律相結合有著重大意義。
本文以大展弦比柔性機翼作為研究對象,通過差分進化算法尋找控制策略中最優參數值并設計了PⅠD、LQR 和輸出反饋三種控制策略應用于陣風減緩控制中。最后,對比分析控制前后機翼翼尖加速度和翼根彎矩值的變化,為飛機陣風響應減緩控制設計方法提供一些參考。
1 仿真模型
1.1 機翼結構模型
機翼模型為一大展弦比柔性機翼,其有限元模型如圖1所示,機翼總長約為2.35m,總重量(質量)約為8.7kg,機翼梁沿翼展方向分為23個離散剖面。
機翼模型結構如圖2 所示,材料為7050-T7451 的十字形梁模擬其剛度特性,機翼后緣及維形材質為松木,機翼前緣采用PMⅠ泡沫裱糊單層碳纖維布的工藝制成,機翼共分成10 個框段,每個框段的維形框通過加強肋(5mm 厚的航空層板)與主梁膠結,維形肋為厚度3mm的航空層板,主梁從其中間穿過但不連接,翼尖小翼蒙皮為碳纖維/泡沫夾層結構,不模擬剛度。伺服舵機通過金屬連接件固定于主梁上,通過搖臂-拉桿機構驅動副翼轉動。
通過計算,得出機翼前十階模態,見表1,垂直一彎頻率為1.55Hz,面內一彎頻率為3.03Hz,垂直二彎頻率為5.35Hz,顫振速度約為35m/s,顫振頻率約為6.37Hz。
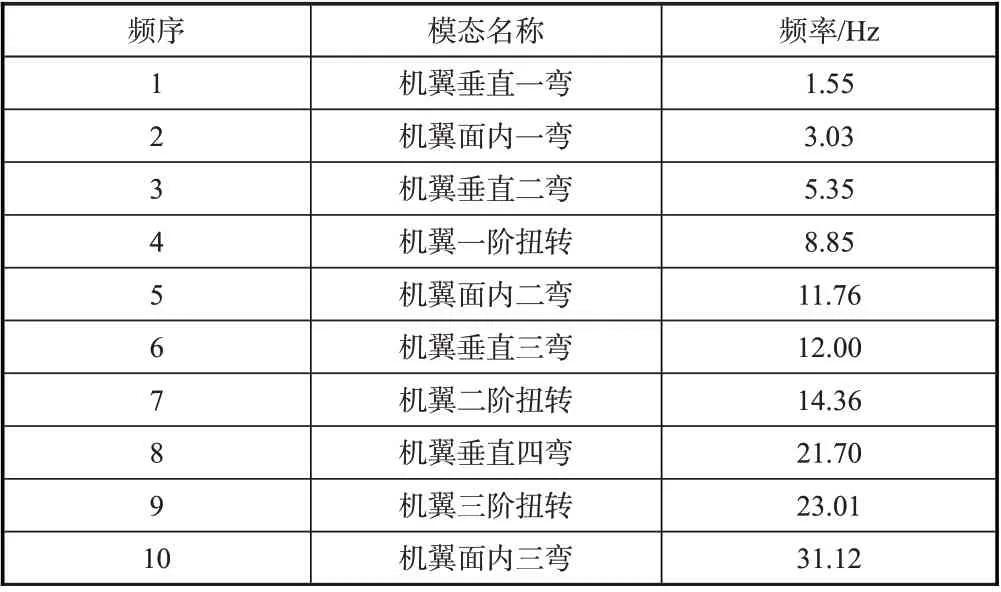
表1 機翼模態Table 1 Wing modal
1.2 陣風模型
根據適航條款AC 25.341-1規定,1-cosine離散陣風速度定義式為
式中,U為陣風速度;Uds為設計陣風速度;H為陣風梯度距離;Uref為參考陣風速度;Fg為飛行剖面緩和系數。陣風模型波形圖如圖3所示。
1.3 機翼陣風響應狀態空間模型
基于模態坐標機翼氣動彈性方程為[11]
式中,M1和M2為質量矩陣;D1為模態阻尼矩陣;K為剛度矩陣;q(t)為機翼彈性模態坐標;δ為操縱面偏轉坐標;wg為陣風的垂直速度;q∞為來流氣體動壓;V為飛行速度;Q1,Q2,Q3分別為操縱面、機翼面和陣風的氣動力系數矩陣。
采用最小狀態法近似非定常氣動力[12]
式中,b為弦長;A0,A1,A2為系數矩陣;L,E為列矢量。
由此得到狀態空間方程為
式中,x'為滯后根,x=xae,A=Aae,B=[BaeEae];C=Cae,D=[DaeFae]。
1.4 差分進化算法
在自然界中,遺傳、變異、選擇的作用,使得生物不斷由低級向高級進化,人們發現適者生存這一規律可以模式化,從而構成一些列優化算法。差分進化算法就是從這種模式中產生的一種智能優化算法。其算法流程如圖4所示。基于本次仿真內容,差分進化算法的具體流程如下。
(1)初始化種群,在n維空間里隨機產生m個個體
(2)變異
DE算法通過差分策略實現個體變異,常見的差分策略是隨機選取種群中兩個不同的個體,將其矢量縮放后與待變異個體進行矢量合成。
式中,r1、r2 和r3 為三個隨機數,區間為[1,NP];F為變異因子,為一個確定的常數。g為第g代,此時Xr1(g)為當代種群中最優個體,即找到當代種群中PⅠD 參數和Q矩陣最優值。
(3)交叉
交叉操作目的為隨機選擇個體,其操作方法為
(4)選擇
DE 中采取貪婪選擇策略,為確定Xi(g)是否成為下一代成員,用試驗矢量Ui(g+ 1)和目標矢量Xi(g)與目標函數進行比較。
在此基礎上循環執行步驟(2)到步驟(4),直到迭代次數達到最大,輸出最優結果。
2 基于差分進化算法PID參數整定
2.1 PID控制模型
PⅠD控制作為應用廣泛的控制算法,算法簡單明了,易于在工程上實現,與差分進化算法相結合,可快速得到適合的參數。
在本仿真中,設飛行速度為20m/s,陣風頻率為1~6Hz,副翼偏轉限制為±10°,找尋范圍內翼尖加速度和翼根彎矩最大值并減緩,模型如圖5所示。對于目標函數的選擇,機翼離散陣風響應過程較為短暫,在1s之內翼尖加速度和翼根彎矩達到最大值,3s 之內恢復穩定。考慮翼尖加速度a和翼根彎矩T的絕對值分別與時間t相乘再積分相加,既能使其最大值快速下降,又不會過度影響穩態時間,兼顧穩定與快速的性能,而且根據需求不同可通過調節權值α1和α2滿足著重改善翼根彎矩或翼尖加速度的需要。積分上限選取到3s可使系統動態過程和穩態過程都受到關注。差分進化算法定義目標函數為
2.2 結果分析
取變異因子為1.2,交叉因子為0.6,種群大小為100,迭代次數為30,目標函數如圖6 所示。翼尖加速度響應如圖7所示,當進行開環仿真時,陣風頻率為6Hz(機翼垂直二彎模態)取得加速度最大值,加速度最大值為40.02m/s2,到達最大值的時間為0.71s;閉環仿真時,最大加速度為11.24m/s2,到達最大值時間為0.21s。
從圖7 中可以看出,閉環控制很好地改善了翼尖加速度的動態性能并且穩態性良好。翼根彎矩響應如圖8 所示,陣風頻率為1Hz(機翼垂直一彎模態)時,機翼翼根彎矩取得最大值,開環仿真最大值為116.07N·m,到達最大值時間為0.63s;閉環仿真最大值為86.81N·m,時間為0.67s,減緩效果為25.2%。
3 基于差分進化算法LQR控制整定
3.1 LQR控制模型
線性二次調節器(LQR)是工業應用較為廣泛的一種控制方法。通過設計狀態反饋控制器使二次型目標函數取最小值來達到理想的效果,具有設計方便、魯棒穩定性良好等特點。
由于難以直接觀測到所有的狀態變量,首先設計狀態觀測器去估量狀態變化。狀態變量的估計值和輸出的估計值狀態空間矩陣為
觀測器盡可能準確地觀測到系統狀態變量,即誤差趨近于零,則需要矩陣A-GC的特征值全都有負實部。矩陣G可通過給定特征值反解A-GC特征方程得到。
LQR控制的二次型目標函數為
式中,Q為狀態量的加權矩陣;R為控制量加權矩陣。
根據Riccati方程
解出狀態變量增益矢量為
LQR控制通過改變Q、R矩陣使得目標函數達到最小,因此可設差分進化算法目標函數與LQR 控制目標函數一致,通過算法迭代得出Q矩陣。積分上限同樣選取3s,可以覆蓋到系統動態過程和穩態過程。
設定工況為飛行速度為20m/s,陣風頻率為6Hz,副翼偏轉限制為±10°,模型如圖9 所示。設定加權矩陣Q為對角矩陣,對角線上的值為a1,a2,…,an。
3.2 結果分析
取交叉因子為0.6,種群大小為100,迭代次數為20次,為平衡收斂和收斂速度,采用自適應變異分子[13]
式中,ni表示第i代,觀測器與實際模型輸出誤差如圖10所示,輸出誤差量級約為10-13,可認為與實際模型相同。
目標函數如圖11 所示,翼尖加速度響應如圖12 所示。當進行開環仿真時加速度最大值為40.02m/s2,到達最大值的時間為0.17s;閉環仿真時,最大加速度為23.11m/s2,到達最大值時間為0.34s,到達穩態時間與開環響應相同。翼根彎矩矩響應如圖13 所示,機翼翼根彎矩取得最大值,開環仿真最大值為116.07N·m,到達最大值時間為0.63s;閉環仿真最大值為87.63N·m,時間為0.66s,減緩效果為24.5%。
3.3 輸出反饋控制
在實際試驗中,要觀測到所有的狀態矢量是比較困難的,對于陣風響應減緩,取翼尖速度、加速度和位移構成狀態矢量進行輸出反饋控制,以翼尖最小位移作為目標函數,由于目標函數不再是二次型,可將Q矩陣視為增益矩陣作用于狀態矢量。翼尖加速度響應如圖14所示,翼根彎矩響應如圖15所示。
在閉環控制時,翼尖加速度最大值為22.17m/s2,時間為0.21s,翼根彎矩最大值為95.1N·m,時間為0.67s,減緩效果為20%。與LQR控制相比,由于LQR控制包含了機翼所有狀態,因此其翼根彎矩減緩效果比輸出反饋控制好,但差別不大,同時輸出反饋控制在技術上更容易實現,易于試驗驗證。
4 結論
本文基于差分進化算法,運用三種不同的控制策略對機翼陣風響應進行了控制。對于PⅠD控制中參數的選取和LQR控制中矩陣的設定,通過算法可以快速求出,且仿真結果良好,在設計初期是一種不錯的方法。在LQR控制策略中,全維觀測器在工程中不易實現,后續會考慮降維觀測器來進行試驗驗證,同時設計輸出反饋控制便于試驗驗證。后續將根據已有的仿真進行陣風響應試驗來優化仿真控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19