嘉定區(qū)無人農(nóng)場(chǎng)的技術(shù)路線
2022-11-23 07:45:38馮敏康
農(nóng)業(yè)開發(fā)與裝備 2022年10期
關(guān)鍵詞:作業(yè)
馮敏康
(嘉定區(qū)農(nóng)機(jī)技術(shù)推廣站,上海市 201800)
1 無人駕駛農(nóng)業(yè)機(jī)械的技術(shù)路線
農(nóng)業(yè)機(jī)械進(jìn)行無人化改裝的關(guān)鍵點(diǎn)就是如何將模擬信號(hào)轉(zhuǎn)化為農(nóng)業(yè)機(jī)械實(shí)際動(dòng)作的方法。以下就是上海市嘉定區(qū)無人農(nóng)場(chǎng)中對(duì)農(nóng)業(yè)機(jī)械進(jìn)行無人化改裝的技術(shù)路線。
1.1 拖拉機(jī)的換向控制
現(xiàn)有拖拉機(jī)的換向方式一般分為兩種:一種是撥桿撥到相應(yīng)方向位置時(shí)停止(久保田135 G拖拉機(jī)),另一種是前進(jìn)、后退撥桿撥到相應(yīng)方向位置時(shí)會(huì)反彈回原位置(凱斯2254拖拉機(jī))。
針對(duì)第一種換向方式的拖拉機(jī),在改造時(shí)模擬其各個(gè)方向動(dòng)作在操作時(shí)產(chǎn)生的電信號(hào)即可;針對(duì)第二種換向方式的拖拉機(jī),在改造時(shí)模擬各個(gè)方向位置在操作時(shí)產(chǎn)生的電信號(hào)以及其在原位置的電信號(hào)即可。
1.2 拖拉機(jī)的換擋控制
進(jìn)行換擋時(shí)需要按下相應(yīng)的換擋按鈕,改變其電信號(hào)進(jìn)行加減擋。現(xiàn)有拖拉機(jī)的換擋方式一般分為兩種:一種是換擋按鍵可以一直加減到指定的高擋位或低擋位(久保田135 G拖拉機(jī));另一種是換擋按鍵到達(dá)區(qū)間最高擋位后,必須同時(shí)按下高擋位保護(hù)按鈕才可以再往更高擋位加或減(紐荷蘭1654拖拉機(jī))。
針對(duì)第一種換擋方式,在改造時(shí),模擬以下電信號(hào):加擋或減擋按鍵按下時(shí)同組線路中的各個(gè)線路電信號(hào)變化、松開時(shí)同組線路中的各個(gè)線路電信號(hào)變化;針對(duì)第二種換擋方式,在改造時(shí),模擬以下電信號(hào):加擋或減擋按鍵按下時(shí)同組線路中的各個(gè)線路電信號(hào)變化、松開時(shí)同組線路中的各個(gè)線路電信號(hào)變化、高擋位保護(hù)按鈕按下按鈕相連的線路電信號(hào)變化、高擋位保護(hù)按鈕與加(或減)擋按鈕同時(shí)按下,其相連的各個(gè)線路電信號(hào)變化。
1.3 插秧機(jī)的秧臺(tái)控制電控改裝
秧臺(tái)抬升、下降位置的控制由原來的手動(dòng)機(jī)械控制實(shí)現(xiàn)電動(dòng)控制,通過加裝一款電機(jī),不帶自鎖裝置,可以靈活地進(jìn)行伸長(zhǎng)與縮短,也是市面上使用比較多的標(biāo)準(zhǔn)驅(qū)動(dòng)電機(jī),使用預(yù)先測(cè)量、設(shè)計(jì)好的結(jié)構(gòu)件或者進(jìn)行更換后的結(jié)構(gòu)件進(jìn)行相連接,一端與電機(jī)首端進(jìn)行相連接,另一端與秧臺(tái)連接的關(guān)鍵性結(jié)構(gòu)件相連接,而電機(jī)的尾端通過對(duì)應(yīng)的結(jié)構(gòu)件連接于車體的固定位置,從而通過電機(jī)伸長(zhǎng)與縮短的長(zhǎng)度,進(jìn)行控制秧臺(tái)的抬升、下降,使得插秧機(jī)秧臺(tái)可以通過對(duì)應(yīng)的指令,達(dá)到自動(dòng)控制的效果,實(shí)現(xiàn)自動(dòng)控制。
1.4 插秧機(jī)的速度控制電控改裝
插秧機(jī)的速度控制,由原來的手動(dòng)機(jī)械控制實(shí)現(xiàn)電動(dòng)控制,通過加裝對(duì)應(yīng)的自鎖電機(jī)進(jìn)行達(dá)到電控的效果,此種電機(jī)類型市面上使用標(biāo)準(zhǔn)電機(jī)也是比較多,使用預(yù)先測(cè)量、設(shè)計(jì)好的結(jié)構(gòu)件或者更換后的結(jié)構(gòu)件進(jìn)行相連接,一端與電機(jī)首端進(jìn)行連接,另一端與速度控制連接的關(guān)鍵性結(jié)構(gòu)件進(jìn)行相連接,而電機(jī)的尾端通過對(duì)應(yīng)的結(jié)構(gòu)件連接于車體的固定位置,且結(jié)構(gòu)件首端位置含有滑槽,可以實(shí)現(xiàn)手自動(dòng)一體,通過發(fā)送指令由對(duì)應(yīng)的電機(jī)的伸長(zhǎng)與縮短進(jìn)行控制速度的加速或者減速,從而實(shí)現(xiàn)插秧機(jī)速度的控制。
1.5 植保機(jī)的智能噴霧控制
北斗智能噴霧控制系統(tǒng),是一套機(jī)電液一體化的流量控制系統(tǒng),利用北斗衛(wèi)星導(dǎo)航系統(tǒng)的定位及速度等信息,結(jié)合壓力傳感器、流量計(jì)等傳感器信息,通過控制器自動(dòng)化、智能化的方式控制開關(guān)閥、比例閥等,進(jìn)一步實(shí)現(xiàn)打藥機(jī)精確、精準(zhǔn)流量控制。
系統(tǒng)可以根據(jù)實(shí)際作業(yè)范圍設(shè)置藥量進(jìn)行作業(yè),能夠精確控制噴口的開合,自動(dòng)調(diào)節(jié)藥液噴灑,實(shí)現(xiàn)打藥作業(yè)范圍內(nèi)打藥均勻的效果。系統(tǒng)還支持信息化回傳,能夠?qū)崟r(shí)上傳作業(yè)信息,控制中心可實(shí)時(shí)監(jiān)控作業(yè)位置、打藥量、作業(yè)面積以及作業(yè)質(zhì)量等。
1.6 收割機(jī)HST手動(dòng)改電控
HST手改電指的是將機(jī)械操作,改為電動(dòng)操作,操控起來方便省力。原車的變速手柄控制方式是人手操作變速桿,引起變速連桿動(dòng)作,實(shí)現(xiàn)后退、停車、前進(jìn)以及速度變化。手動(dòng)改電控后,變速手柄和變速連桿之間增加了角度傳感器和帶有模擬反饋的推桿電機(jī)。手改電后的控制方法是人手操作機(jī)械手柄,手柄帶動(dòng)角度傳感器做動(dòng)作,會(huì)相應(yīng)地產(chǎn)生一個(gè)角度變化,變化量輸入到驅(qū)動(dòng)控制器,驅(qū)動(dòng)控制器根據(jù)該角度變化量,驅(qū)動(dòng)推桿電機(jī)產(chǎn)生相應(yīng)動(dòng)作,推桿電機(jī)帶動(dòng)變速連桿動(dòng)作,這樣就實(shí)現(xiàn)了變速功能。
1.7 收割機(jī)離合裝置電控改裝
原車離合裝置由驅(qū)動(dòng)皮帶輪、從動(dòng)皮帶輪、傳動(dòng)皮帶、張緊輪組成,離合裝置結(jié)合時(shí),拉動(dòng)手柄,通過拉線傳動(dòng)帶動(dòng)張緊輪將驅(qū)動(dòng)皮帶輪和從動(dòng)皮帶輪之間的皮帶拉緊,增大摩擦,使從動(dòng)皮帶輪跟隨驅(qū)動(dòng)皮帶輪轉(zhuǎn)動(dòng),帶動(dòng)脫谷滾筒或割臺(tái)的工作機(jī)構(gòu)運(yùn)轉(zhuǎn),離合分離時(shí)松開拉線,皮帶松開,從而切斷工作裝置的動(dòng)力來源。
原車純機(jī)械離合裝置通過加裝執(zhí)行電機(jī)、拉線和安裝結(jié)構(gòu)件,使其能夠?qū)崿F(xiàn)驅(qū)動(dòng)器控制,將原車的純機(jī)械結(jié)構(gòu)改為電控,便于無人駕駛系統(tǒng)控制,當(dāng)控制離合結(jié)合時(shí),執(zhí)行電機(jī)運(yùn)轉(zhuǎn)將拉線拉緊,帶動(dòng)原車離合機(jī)構(gòu)的張緊輪收緊,就能實(shí)現(xiàn)機(jī)械離合的電動(dòng)控制,且當(dāng)電控機(jī)構(gòu)不工作時(shí),不影響原車手動(dòng)操作。
1.8 收割機(jī)遙控卸糧
相比于拖拉機(jī)遙控功能,收割機(jī)的遙控還增加了遙控卸糧功能,當(dāng)糧桶滿時(shí),可在手機(jī)端查看糧倉(cāng)狀態(tài),此時(shí)通過遙控駕駛將車輛駕駛到卸糧點(diǎn),通過遙控調(diào)整糧桶位置,讓其對(duì)準(zhǔn)運(yùn)糧車,點(diǎn)擊卸糧按鈕即可開始卸糧,卸糧結(jié)束后斷開卸糧離合,操作糧桶回位,再通過手機(jī)APP控制車輛行駛到需要作業(yè)的位置,點(diǎn)擊開始作業(yè)即可繼續(xù)作業(yè)。
該功能真正實(shí)現(xiàn)了收割機(jī)作業(yè)過程中不需要人操作車輛,將人從惡劣的作業(yè)環(huán)境中解放出來,大大降低了人的勞動(dòng)強(qiáng)度,甚至可以一個(gè)人控制多臺(tái)車輛作業(yè)。
2 無人農(nóng)場(chǎng)的相關(guān)數(shù)據(jù)
自無人農(nóng)場(chǎng)項(xiàng)目建設(shè)以來,嘉定區(qū)農(nóng)機(jī)技術(shù)推廣站進(jìn)行了針對(duì)無人農(nóng)機(jī)耕、種、管、收的數(shù)據(jù)測(cè)試,并與人工作業(yè)進(jìn)行了比較。由于拖拉機(jī)的改裝涉及動(dòng)力換擋和動(dòng)力變向,而動(dòng)力換擋和動(dòng)力換向兼具的拖拉機(jī)不適用于嘉定的水田,所以在拖拉機(jī)的改裝方面存在有局限性,使得無人拖拉機(jī)的工作質(zhì)量與人工有所差異,故無法獲得準(zhǔn)確數(shù)據(jù)。
2.1 無人插秧機(jī)的作業(yè)數(shù)據(jù)
無人插秧機(jī)試驗(yàn)的機(jī)具為洋馬VP8D水稻插秧機(jī),試驗(yàn)田塊為外岡的高水平良田,適用性較為廣泛。其次,該田塊情況良好、軟硬程度適中,適合無人駕駛技術(shù)試驗(yàn)的開展,提升試驗(yàn)數(shù)據(jù)準(zhǔn)確性。試驗(yàn)數(shù)據(jù)如表1、表2所示。
由試驗(yàn)數(shù)據(jù)(表1、表2)計(jì)算可知:無人駕駛的作業(yè)效率為0.46 hm2/h,人工駕駛的作業(yè)效率為0.53 hm2/h。
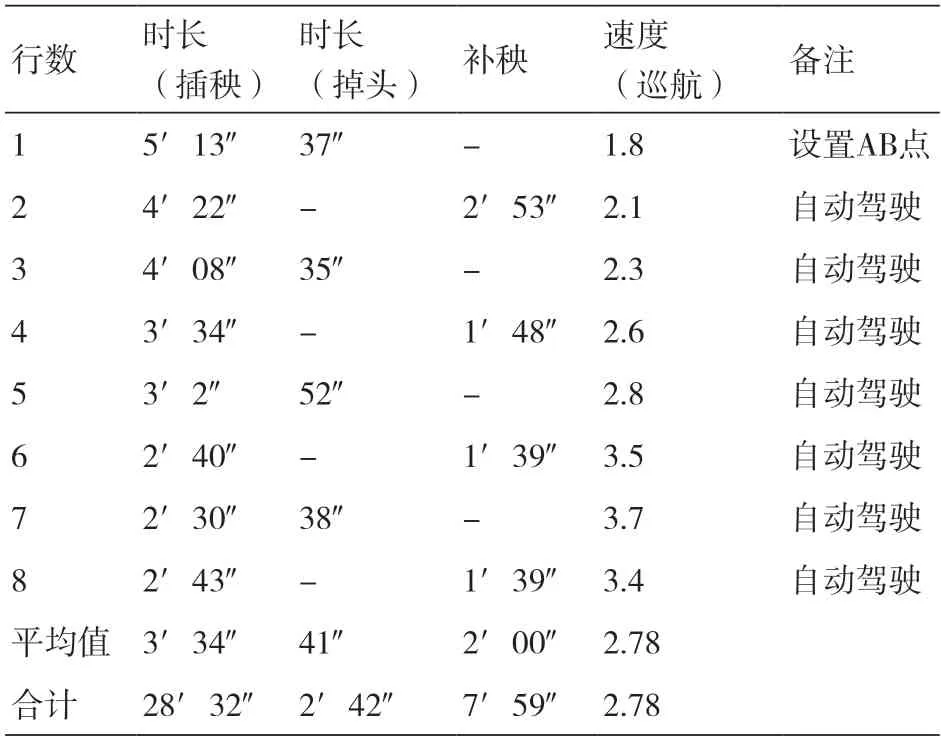
表1 無人駕駛插秧機(jī)作業(yè)數(shù)據(jù)(單位:km/h)

表2 人工駕駛插秧機(jī)作業(yè)數(shù)據(jù)(單位:km/h)
2.2 農(nóng)業(yè)無人機(jī)的作業(yè)數(shù)據(jù)
無人植保作業(yè)選擇以丸山自走式噴桿噴霧機(jī)與農(nóng)業(yè)無人機(jī)作對(duì)比。由表3、表4可見,經(jīng)計(jì)算自走式噴桿噴霧機(jī)在大田中平均每畝作業(yè)時(shí)間均為1.6 min,農(nóng)業(yè)無人機(jī)平均每畝作業(yè)時(shí)間均為1.24 min。作業(yè)效率上農(nóng)業(yè)無人機(jī)是自走式噴桿噴霧機(jī)的1.2倍左右。但隨著單塊田塊情況變化,自走式在小田塊、不規(guī)則田塊、魚塘田中效率將遠(yuǎn)低于農(nóng)業(yè)無人機(jī)。
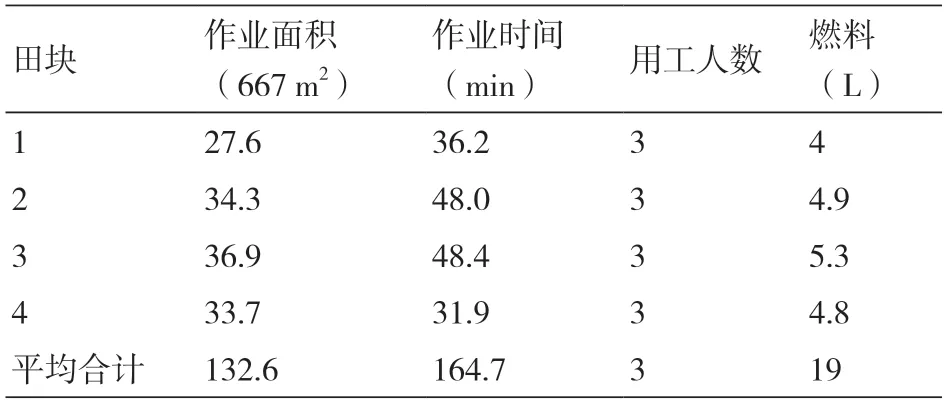
表3 農(nóng)業(yè)無人機(jī)作業(yè)數(shù)據(jù)
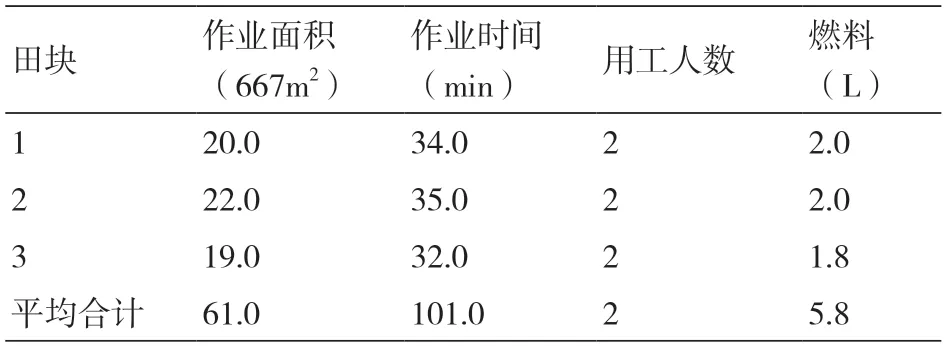
表4 自走式噴桿噴霧機(jī)作業(yè)數(shù)據(jù)
2.3 無人收割機(jī)的作業(yè)數(shù)據(jù)
無人收割試驗(yàn)的機(jī)具為洋馬YH6118水稻收割機(jī),試驗(yàn)數(shù)據(jù)如所示。由試驗(yàn)數(shù)據(jù)(表5)計(jì)算可知:無人駕駛的作業(yè)效率為0.37 hm2/h,人工駕駛的作業(yè)效率為0.424 hm2/h。
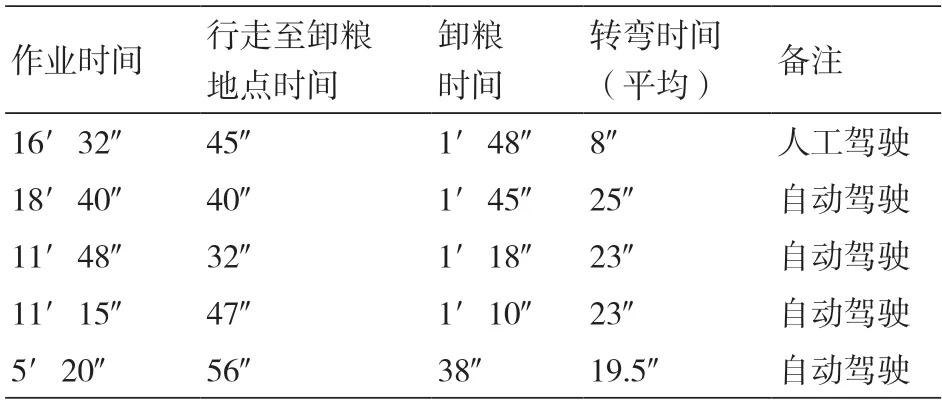
表5 無人駕駛收割機(jī)作業(yè)情況表(0.29 hm2無人駕駛+0.12 hm2人工駕駛)
3 結(jié)語
1)無人插秧和無人收割的工作效率會(huì)略低于人工駕駛,但是采用無人駕駛可大幅度降低人工成本。目前,嘉定區(qū)高水平設(shè)施良田機(jī)械插秧作業(yè)效率約為5.53~6.67 hm2/天,用工平均成本為13.75元/667m2。無人農(nóng)場(chǎng)采用智能駕駛系統(tǒng),作業(yè)效率約為5.13~6.46 hm2/天,且由于無需擺秧工,平均成本降至7.2~9元/667m2。經(jīng)試驗(yàn)對(duì)照,相同作業(yè)條件下,無人駕駛較人工駕駛可以節(jié)約一個(gè)人工,平均成本大幅降低。
2)田塊條件良好情況下,農(nóng)業(yè)無人機(jī)與自走式植保車作業(yè)速度無明顯差異,但在田塊條件復(fù)雜情況下,無人機(jī)不受地域條件約束,作業(yè)效率高、作業(yè)效果良好。
同時(shí),數(shù)字化無人農(nóng)場(chǎng)的應(yīng)用改變了農(nóng)業(yè)生產(chǎn)對(duì)勞動(dòng)力的強(qiáng)依賴性,重新定義農(nóng)業(yè)人才的新標(biāo)準(zhǔn),管理、技術(shù)復(fù)合型人才已然成為嘉定區(qū)都市型農(nóng)業(yè)人才的培養(yǎng)方向,找到了“誰來種地、如何種地”的答案。
猜你喜歡
小主人報(bào)(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級(jí)適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08