無人履帶平臺發動機控制技術
2022-12-01 12:37:58馬廣原陳慧巖
兵工學報 2022年11期
關鍵詞:發動機
馬廣原, 陳慧巖
(北京理工大學 機械與車輛學院, 北京 100081)
0 引言
隨著智能技術的快速發展,裝備無人化逐漸成為發展趨勢,可在作戰中發揮重要作用。履帶車輛具有良好的通過性和環境適應性,是陸軍裝備重要組成部分。對無人裝備的研制可分為重新設計無人平臺和基于現有裝備改造兩種方式。研制先進的新型號無人平臺,費用高、周期長,應用新技術對現有裝備改造,既可以對老舊型號加以利用并縮短研發周期,又可為無人平臺設計積累經驗。目前國外已經有不少通過現有裝備改造的無人平臺,例如美國無人駕駛M113裝甲運輸車、俄羅斯“天王星-9”無人戰車等[1]。我國也在積極探索基于舊型號裝備改造無人平臺,其中對原有動力傳動裝置機械結構進行無人化改造并適應無人系統是其中的重點及難點。
本文中無人履帶機動平臺使用大功率柴油機作為動力執行系統,目前對柴油機控制的研究多為使用先進控制算法提高發動機轉速穩定性以及抗負載能力[2-6],而對柴油機調速特性適配車輛運行工況的研究較少。柴油機和變速箱是車輛動力傳動系統的重要組成部分,對柴油機和變速箱協同控制的研究中,多以變速箱換擋特性為主,柴油機配合變速箱工作[7-11],此種方法換擋特性制定方法復雜,難以適應無人履帶平臺復雜工況。無人履帶機動平臺具有無人打擊、警戒巡邏、物資運輸、無人值守等功能,這對其軌跡跟蹤控制精度提出極高要求,需要控制系統及執行系統的密切配合,要求動力系統具有自動啟停、可變調速特性等功能以適應無人平臺操控發動機的要求。
本文以某型輸送車搭載的6150型機械式調速柴油機為研究基礎,探究底層控制系統對無人機動平臺性能的影響,并設計發動機電控制系統,加入自動啟停、可變發動機調速特性功能,以適應無人機動平臺在不同工況下的需求,與車輛傳動系統配合以提高無人機動平臺動力性和通過能力。
1 無人機動平臺體系結構
1.1 無人平臺系統框架
無人履帶機動平臺需要在無人干預的情況下穿越復雜的地形,這就要求其能夠感知環境信息并規劃得到目標軌跡,最后通過控制系統實現軌跡跟蹤。無人機動平臺系統是一個復雜的相互耦合的整體,其性能與系統各個部分性能密切相關。
無人平臺整車系統由感知定位模塊、決策規劃模塊和控制模塊組成[12-21]。感知定位模塊中實現了傳感器與系統的通訊、數據接收和保存,并將環境信息發送至決策規劃模塊和控制模塊。決策規劃模塊從環境信息中取得相機、雷達及慣性導航信息,在數據融合的基礎上實現地圖重建;根據路點信息快速搜索無碰撞通道,并以履帶平臺的運動軌跡特性為基礎生成局部路徑,最后將處理后得到的局部路點信息輸出至控制模塊,控制模塊通過解算得到期望速度以及轉向模式和轉向角度,生成控制指令并將其傳輸至發動機、變速箱、轉向等控制器。
軍用無人履帶平臺運行環境復雜多變,既需要在公路上高速移動,又需要在越野環境行駛,不同的工況對由發動機和變速箱為核心組成的動力傳動系統提出不同的要求:例如在阻力系數小的平路上長距離行駛時,提高系統經濟性以增加平臺作戰半徑;在短距離快速機動時,則以提高系統動力性為主。動力傳動系統性能與發動機調速特性和調速特性密切相關,本文通過分析發動機控制對無人平臺性能的影響,設計適應無人履帶平臺發動機智能控制與管理系統。
1.2 無人平臺動力傳動系統
本文研究對象為基于定軸傳動、行星轉向機構和柴油發動機組成的履帶車輛平臺。其傳動圖如 圖1 所示,該平臺的動力裝置為額定功率260馬力的6缸水冷柴油發動機;動力通過主離合器傳遞至傳動裝置,傳動裝置是由原車定軸式變速箱改造而來的電控機械自動變速箱(AMT)。車輛轉向裝置為串聯在變速箱輸出端的二級行星轉向機,由一個行星排和三個摩擦元件組成,通過控制左右側履帶主動輪轉速,來實現車輛差速轉向。
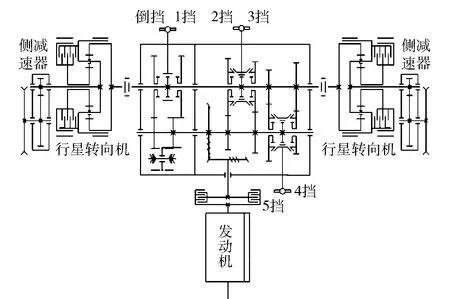
圖1 無人履帶平臺傳動簡圖
2 直駛轉向工況下發動機調速特性制定
發動機調速特性指當油門開度固定在某個位置,由調速器自動控制噴油泵供油齒桿的移動,當負載從零變到最大時發動機轉矩或者功率等參數與轉速的變化關系。調速特性直接影響無人履帶平臺的動力性、經濟性和路徑跟蹤控制精度。無人履帶平臺運行工況復雜多變,在不同路面行駛、上下坡、轉向等工況對發動機調速特性均有不同的需求。本節通過分析無人平臺直駛和轉向兩種工況下對發動機調速特性的需求,指出在無人平臺直駛時應使用原機械調速發動機的調速特性以適應AMT換擋特性,在轉向時應保證在油門開度不變的前提下,發動機轉速不隨負載變化,避免車輛降速過多導致AMT異常換擋、發動機熄火等現象,使車輛路徑跟蹤精度下降。
2.1 直駛工況下發動機調速特性
車輛的動力系與傳動系是相互影響、彼此關聯的,這就要求將動力傳動系統作為一個整體進行研究。無人履帶平臺使用的AMT自動變速箱換擋規律根據原機械調速發動機調速特性曲線計算得到。對于無人履帶平臺而言,應主要考慮動力性和通過性,因此采用最佳動力性換擋規律。在無人平臺直駛工況下,為保證發動機特性與AMT自動變速箱換擋特性匹配,應盡可能模仿原機械調速發動機調速特性曲線。
為測定機械調速發動機調速特性需要進行臺架試驗,并實時測量發動機轉速、油門開度和轉矩信息。轉速測量采用磁電式轉速傳感器測量曲軸轉角,安裝在發動機飛輪殼上,通過測量接收到的脈沖頻率計算得到發動機轉速。油門拉桿通過試驗臺架上電機驅動,可以任意調節油門開度。臺架上安裝有水力測功機,控制臺通過控制水門開度控制負載大小,并實時顯示此時發動機轉矩信息。試驗時將油門固定在100%,通過測功機施加載荷,發動機轉速隨載荷增大逐漸下降,記錄下每次轉速下降50 r/min 并穩定時的轉速和轉矩信息,直到發動機轉速低于1 300 r/min到達最大轉矩點時停止加載,得到油門開度為100%時的發動機外特性曲線。將發動機油門開度依次減小10%,重復上述步驟以采集柴油機部分調速特性曲線。當柴油機空載轉速小于800 r/min時停止加載,此時油門開度為30%。得到原機械調速發動機調速特性曲線如圖2所示,其中不同顏色曲線從左至右分別代表了柴油機油門開度為30%~100%時,發動機輸出轉矩與轉速關系圖。從圖2中可以看出,當柴油機油門開度固定,轉速隨著轉矩的上升而下降,調速率為10%。發動機最大轉矩點在1 300~1 400 r/min之間,最大轉矩 1 130 N·m。
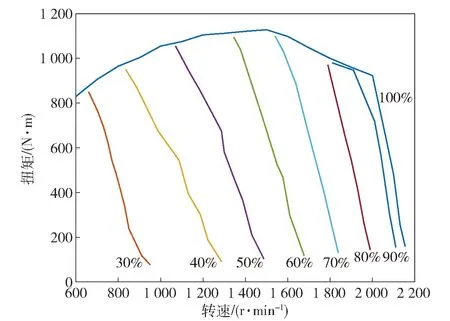
圖2 機械調速發動機調速特性曲線
2.2 轉向工況下發動機調速特性
無人履帶車輛轉向時所需發動機功率遠大于車輛處于相同條件下(發動機轉速相同、變速箱擋位相同)直駛時消耗的功率。履帶車輛轉向時阻力包括內部機構摩擦阻力和外部履帶與地面相互作用產生的阻力。外阻力包含履帶相對地面滑動產生的摩擦力,如果是在松軟路面上還包含剪切阻力和推土阻力。轉向時消耗發動機功率可由(1)式計算得到:
(1)
式中:Pe表示轉向過程中消耗的發動機功率;PR表示轉向時外側履帶消耗的功率;Pf表示轉向機構摩擦元件滑摩并換算到主動輪時消耗的功率;η表示由履帶車輛傳動裝置效率;Ph為內側履帶與地面作用產生的再生功率。無人平臺轉向時外側履帶消耗功率和內側履帶再生功率可由(2)式計算得到:
(2)
式中:Fo、Fi分別表示地面對外側和內側履帶產生的作用力;f滾動阻力系數;G、B、L為車輛參數,分別表示車重、車寬和車長;v表示外側履帶與接地面中心的切線速度;ρ為相對轉向半徑,是轉向半徑R與車寬B的比值;μ為轉向阻力系數,隨轉向半徑減小而增大,
(3)
式中:μmax為最大轉向阻力系數。
本文使用的無人履帶平臺轉向裝置使用的是二級行星轉向機,此種轉向裝置有兩種規定轉向半徑,在中低速行駛過程中,多以第一規定轉向半徑轉向,此時不存在摩擦元件滑摩消耗的功率,即Pf=0。無人履帶平臺以第一位置轉向時功率與直駛功率之比約為1.9。此時為避免車速大幅下降將增大油門開度,從而越過降擋曲線,導致自動變速箱循環換擋甚至發動機熄火。且車速下降或換擋導致的動力中斷,都將增加無人平臺轉向時路徑跟蹤誤差。因此無人平臺轉向時應改變發動機調速特性,在油門開度不變的情況下,避免發動機轉速隨負載增加而降低。直駛時發動機調速特性如圖3所示,此時在油門開度不變時,發動機轉速不隨負載變化。
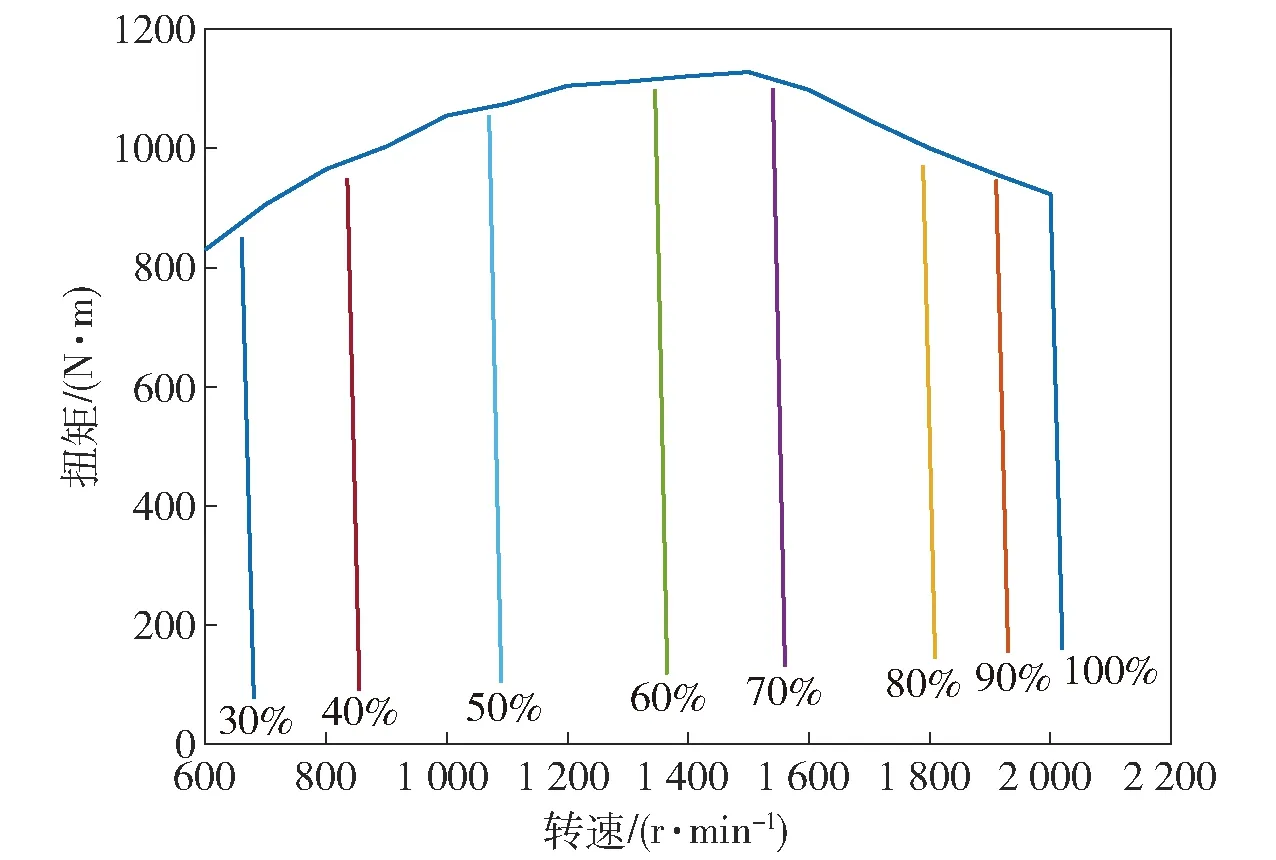
圖3 轉向工況下發動機調速特性曲線
3 無人平臺發動機系統硬件設計
人在控制車輛的行駛過程中,通過眼睛、耳朵、身體等感官感知車輛、環境信息,并通過大腦分析障礙物、路面等情況的方法,得到車輛的目標速度和航向,并操縱油門、轉向、剎車等操縱裝置控制車輛運動狀態。下一時刻的車輛狀態和環境信息再被駕駛員感知形成了一個實時閉環系統。對于無人駕駛車輛而言,需要自主感知車輛行駛環境,并選擇發動機、變速箱最佳控制方式,發揮車輛的最佳性能。
無人履帶平臺在不同工況下對發動機調速特性的需求不同,需要發動機控制系統具有可變調速特性功能。機械調速發動機無法實時改變調速特性,需要將機械調速發動機改為電控。柴油發動機控制系統軟硬件組成結構如圖4所示,控制系統由傳感器、控制器和執行器三部分組成。控制器通過CAN網絡與整車相關系統控制器進行通信,電子控制單元(ECU)自主選擇控制模式并遵循系統閉環控制策略控制執行器工作,實現轉速和轉矩控制。此外,控制器時刻監測發動機機油壓力和水溫狀態,當冷卻水溫高于警戒線或機油壓力低于最低允許值時,將根據情況作出降低發動機功率或降低變速箱擋位等控制,并發出警報,以避免發動機在故障狀態下長時間運行導致損壞。

圖4 柴油發動機控制系統
3.1 發動機調速系統機械結構改造
原6150型發動機使用的機械調速器采用離心式調速裝置,由油門拉桿力和轉子離心力二力平衡,共同作用決定供油齒桿開度。采用位置式控制系統對其進行電控化改造只需去掉機械調速泵原有的離心式調速裝置,并使用電磁執行器替代,無需對高壓油路、噴油器進行變動。電子調速器示意圖如圖5所示,執行器選用具有結構簡單、體積小、控制簡單等優點的比例電磁鐵,供油齒桿與執行器推桿固連,并與回位彈簧共同組成調速系統。
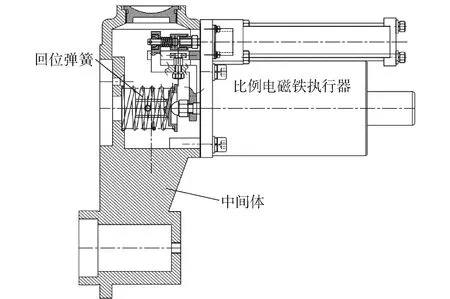
圖5 執行器示意圖
比例電磁鐵執行器最大推力根據回力彈簧彈力選擇。根據發動機噴油泵出廠要求,供油齒桿伸出長度應大于17 mm,此時彈簧彈力為85 N。理想情況下,比例電磁鐵最大推力應等于彈簧最大壓縮力,即執行器通電電流最大時,供油齒桿伸出17 mm。但是彈簧剛度過大會導致執行器長時間處于大電流工作,將產生驅動電路發熱的問題。因此本文選用最大推力為100 N的比例電磁鐵代替機械調速器控制供油齒桿移動。調速系統階躍響應曲線如圖6所示,在44 ms時下發目標指令,然后執行器快速響應并在88 ms時達到目標位置,穩定時間小于50 ms。
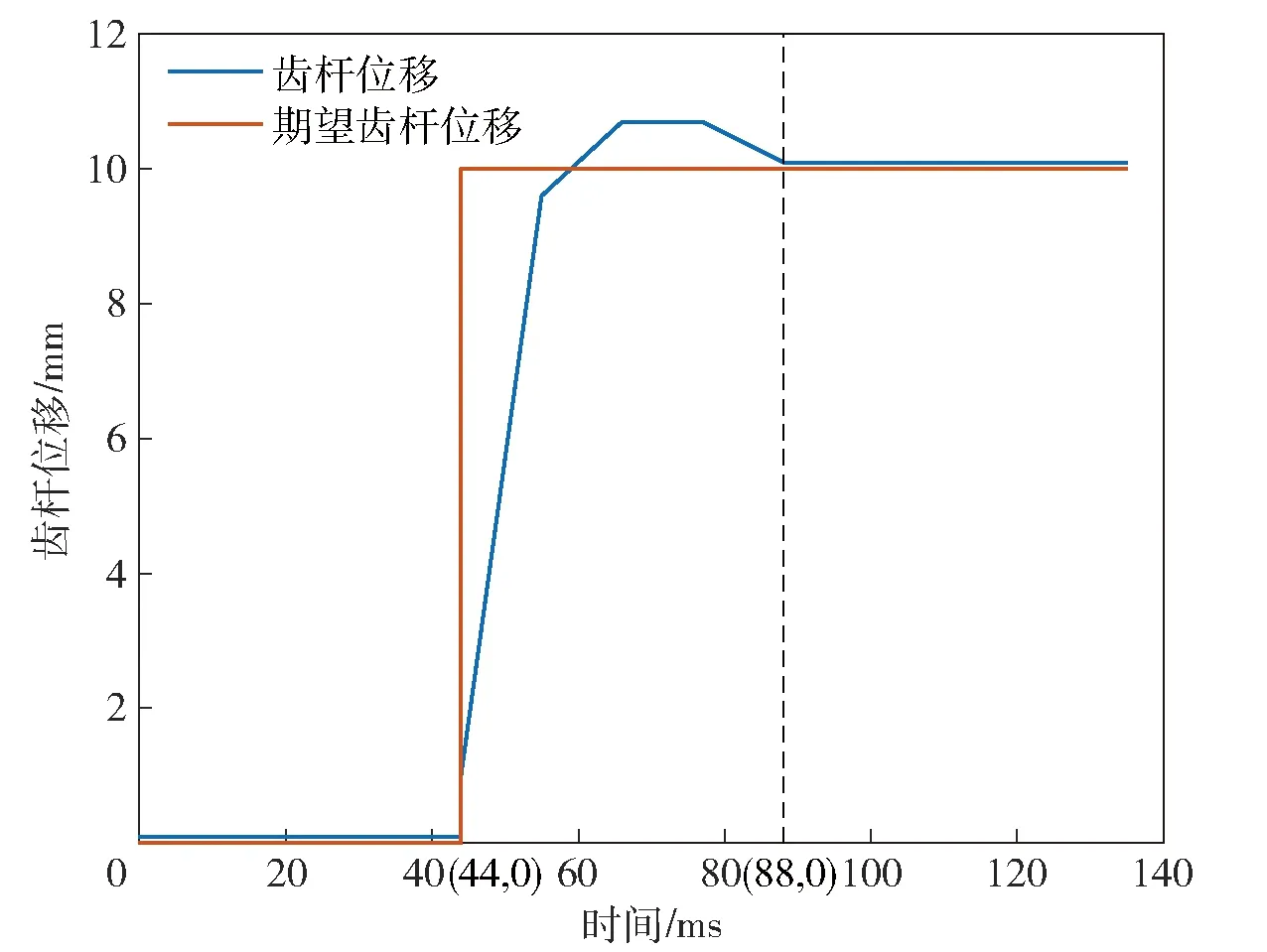
圖6 調速系統階躍響應圖
3.2 電控系統硬件組成
控制器ECU采集發動機轉速、冷卻水溫、機油壓力等信息,經過軟件處理,輸出執行器控制信號,并將采集到的信息通過CAN總線發送給上層控制系統。ECU硬件組成如圖7所示,電控系統微處理器使用的是飛思卡爾專為汽車電子設計的MPC5644A處理器。控制器具有兩路頻率量輸入信號,以采集發動機轉速信息。轉速傳感器采用的是磁電式轉速傳感器,經過頻率信號處理電路進行濾波、限幅、整型后成為標準方波引入CPU。具有五路模擬量輸入信號,分別采集發動機冷卻水溫、機油壓力、機油溫度、供油齒桿位移和油門踏板開度信息。CPU通過計算,輸出PWM波,經過功率放大電路后,驅動執行器工作。

圖7 發動機ECU硬件組成
控制器擁有兩路CAN通信電路,一路用于向無人平臺CAN網發送發動機轉速、轉矩、水溫、油壓等信息,并接收目標轉速、轉矩控制指令,另一路用于調試。由于控制器經常處于復雜電磁環境下工作,容易造成通信錯誤增加,甚至損壞通信網絡,因此采用隔離式CAN總線收發器實現總線與控制器的完全隔離。為防止車輛啟動時車載電源電壓波動劇烈,使用具有寬電壓范圍降壓- 升壓開關穩壓器的電源穩壓模塊,可對輸入電壓進行調節,并輸出5 V電壓,有效解決了無人機動平臺車載電源波動的問題。
4 無人平臺發動機控制系統軟件設計
柴油發動機軟件架構如圖8所示,包含發動機運轉狀態信息的輸入和濾波處理、智能自動啟停控制、運行狀態切換、系統故障自診斷以及處理等功能。無人機動平臺控制實質是通過控制系統代替人進行操作實現車輛的自主運行,因此要求發動機控制軟件識別車輛運行狀態,自主選擇控制模式,并實現轉速、轉矩的智能調節。

圖8 柴油發動機軟件架構
電控柴油機共有啟動、停車、運行和故障四種運行狀態。發動機處于停車狀態時,接收到上層系統下發的啟動信號即進入啟動程序,啟動成功后進入運行狀態。運行狀態分為平路直駛、轉向兩種主要控制模式,對應不同的發動機特性曲線和調速參數。平路直駛時控制軟件調節發動機特性曲線與原機械調速發動機特性曲線相同,可以與變速箱更好地匹配。履帶車輛轉向時所需發動機功率遠大于直駛,為保證車輛精確跟蹤目標軌跡,應進行轉矩控制,并盡可能減小調速率,在允許的情況下可以短時間提高發動機最大功率。控制系統還具有故障自診斷和處理功能,以保護發動機避免長時間在異常狀態下工作而損壞。
4.1 發動機啟動控制
柴油發動機冬季低溫環境下起動困難,啟動時產生大量有害廢氣,且發動機磨損大多在啟動瞬間,因此啟動控制是發動機控制系統的重要部分。發動機啟動控制包括啟動電機控制、發動機轉速檢測、以及噴油量設置三個部分。啟動控制邏輯如圖9所示,發動機處于停機狀態時,接收到上層系統下發的啟動信號,進入啟動控制循環。開啟啟動電機繼電器。當軟件檢測到發動機轉速超過100 r/min時,即打開供油齒桿,供油齒桿開度根據溫度計算得到,溫度越低,齒桿開度越大,噴油量越高。隨著發動機開始供油,轉速迅速上升,當轉速超過300 r/min時,即進入發動機轉速閉環控制,此時供油齒桿開度根據當前轉速和期望轉速計算得到。當發動機轉速大于650 r/min時,即認為轉速啟動成功,程序退出啟動循環。

圖9 發動機啟動控制流程圖
4.2 柴油發動機調速特性控制
電控柴油機調速特性控制邏輯如圖10所示,包含調速特性選擇和調速計算兩部分。無人履帶平臺上層控制系統基于期望軌跡和車輛當前狀態,計算出車輛油門、轉向角度指令,并通過CAN網絡下發給整車控制器,隨后由整車控制器解析得到柴油機控制指令。控制指令包含柴油機調速特性選擇及目標油門開度,柴油機控制器根據控制指令選擇直駛工況或者轉向工況下的調速特性,最后進行調速計算,得到柴油機目標轉速。調速計算的方法采用逐次逼近法,每隔200 ms根據當前柴油發動機轉速和負載大小計算出下一時刻的目標轉速,不斷調節直到發動機轉速達到穩定。

圖10 柴油發動機調速特性控制
4.3 發動機轉速、轉矩調節
如圖11所示,發動機控制分為轉速控制和轉矩控制兩種方式,以適應車輛復雜多變的運行環境。轉速控制采用轉速閉環和齒桿位移閉環雙閉環控制系統。車輛在正常行駛過程中,要求發動機調速系統既有極高的響應速度,又要有極短的穩定時間和轉速精度。由于柴油機是一個非線性的、時變的復雜系統,使用一套PID參數難以得到理想的控制效果,可以通過自適應PID控制方法解決。在進行閉環調速計算前,根據發動機轉速和期望轉速偏差和偏差變化率自動選擇PID控制參數,以解決調速時超調較大、穩定時間較長以及怠速轉速不穩定等方面的問題。當車輛處于換擋結束離合器接合工況或處于上坡、轉向工況時,為保證發動機快速響應需要使用轉矩控制模式。轉矩控制直接通過齒桿位移PID閉環控制供油齒桿開度,為避免發動機飛車,此模式需在離合器接合時使用。

圖11 發動機轉速、轉矩控制流程圖
噴油泵供油齒桿使用比例電磁鐵控制,齒桿伸出位置和控制器電流輸入可以簡化為比例+積分+純滯后環節,此類控制對象通常采用PID控制。為克服傳統PID控制算法需要對每次測量的偏差值進行累加的不足,采用增量式PID算法:
Δu(k)=Kp(ek-ek-1)+Kiek+
Kd(ek-2ek-1+ek-2)
uk=uk-1+Δu(k)
(5)
式中:Δu(k)為每次計算得到的控制量偏差;uk為控制量;ek為控制量和目標值之間的偏差;Kp、Ki、Kd為PID控制參數。
4.4 DBR油量限制
DBR油量限制用于控制柴油機不同轉速下的最高輸出功率。通過采集柴油機最大扭矩點、最大功率點供油齒桿位移,繪制DBR油量限制曲線。此外考慮到低轉速時容易燃燒不完全,當柴油機轉速低于1 000 r/min時,將供油齒桿位移限制為13 mm。當柴油機轉速超過2 300 r/min時,加入超速保護功能,進行斷油處理。DBR油量限制曲線如圖12所示。

圖12 DBR油量限制曲線
4.5 發動機故障診斷保護功能
發動機故障診斷和保護功能是保障發動機正常運轉的重要功能,縱觀無人車輛比賽與使用,無人機動平臺由于傳動系統配合不當,使發動機長時間工作于高負荷區間,且缺乏保護措施而使發動機損壞的問題頻頻出現,因此加入發動機故障診斷處理功能至關重要。
如圖13所示,發動機控制程序每100 ms進行一次故障檢測,如果發現問題,則根據其對發動機運行產生的影響共有四種處理方式:當檢測到水溫、油壓傳感器數據異常時,車輛仍可以正常行駛,僅發出異常警報;當冷卻水溫高于105 ℃時,說明發動機處于超負荷運轉狀態,此時應降低發動機功率輸出,待水溫降低后恢復;若發動機水溫超過110 ℃或機油壓力低于0.25 MPa,此時長時間運轉會對發動機造成損害,僅允許車輛以最低速度行駛到維修處;若發動機機油壓力低于0.08 MPa,此時運轉發動機會造成極大損壞,應立即停車處理。

圖13 發動機故障處理程序
5 試驗驗證
為驗證電控系統控制性能是否滿足無人裝備機動平臺的需求,搭建了發動機試驗臺架,以驗證電子調速發動機在不同工況下的調速特性,最后進行實車直駛和轉向兩種工況的試驗。
5.1 直駛狀態下發動機試驗
發動機直駛狀態下調速特性模仿原機械式發動機,為驗證此時電子調速發動機的調速特性,將電調發動機安裝在試驗臺架上,利用水力測功機對發動機進行加載。控制臺通過控制水門開度控制負載大小,并可以實時顯示此時發動機轉矩信息,試驗數據通過串口通信與采集電腦連接,采集頻率為50 Hz。使用電腦控制發動機油門信號,分別測定不同油門開度下的特性曲線。試驗結果如圖14所示,與原機械發動機試驗結果相差4%以內,可以認為具有相同的調速特性。
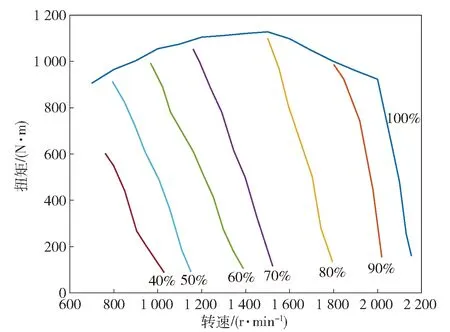
圖14 發動機調速特性曲線圖
5.2 轉向工況下發動機試驗
車輛轉向時功率遠大于直駛功率,相當于突然施加負載,此時發動機應快速反應并回到初始轉速。為驗證發動機對抗負載擾動的能力,通過測功機快速施加負載檢驗發動機調速性能。圖15所示為發動機處于1 300 r/min時突加突卸500 N·m載荷的試驗數據圖。數據圖分為上下兩部分,下圖曲線表示發動機負載變化,上圖曲線表示發動機轉速變化。從圖中可以看出發動機在外界負載變化后快速響應,并迅速恢復穩定,轉速波動率小于10%,可以保證無人平臺轉向時速度恒定。
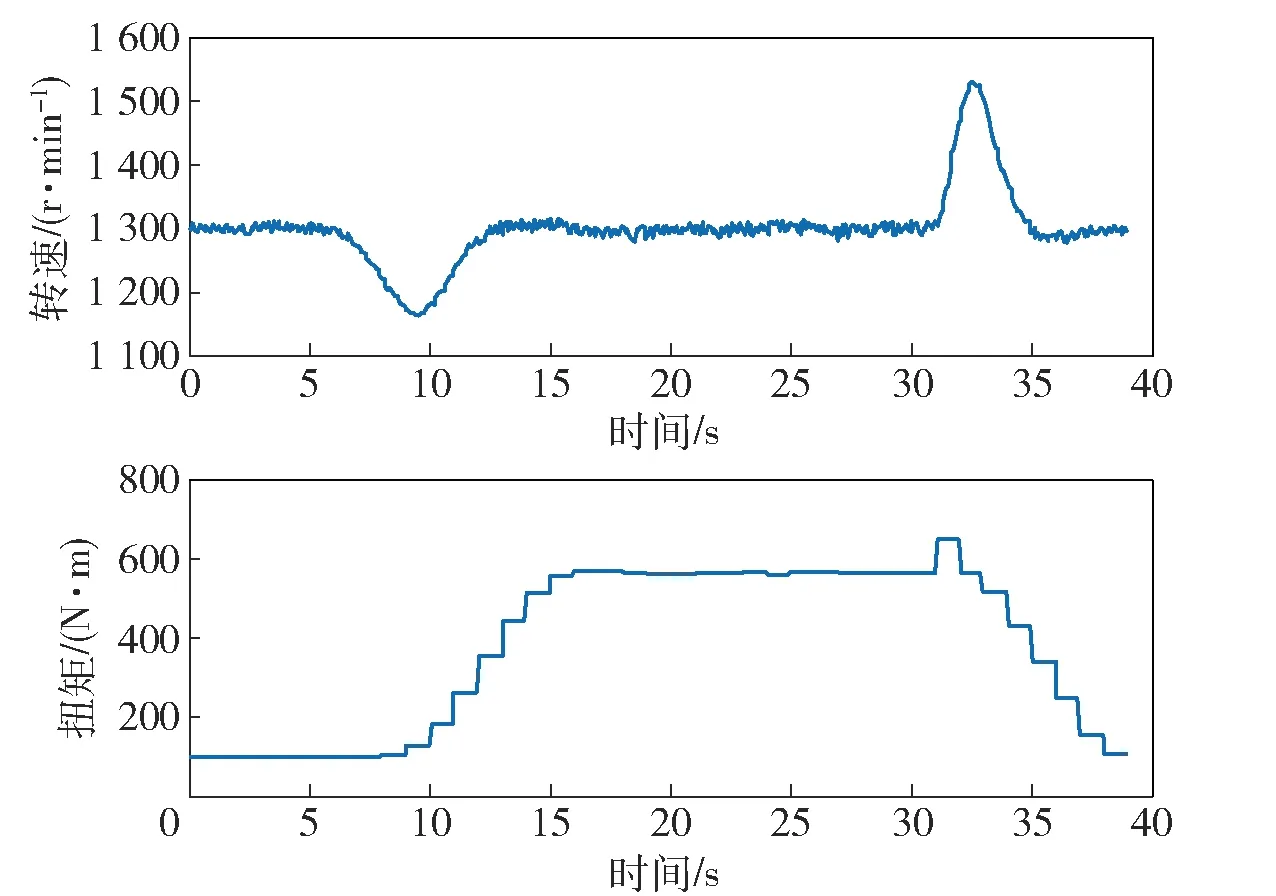
圖15 發動機載荷突變試驗
5.3 實車加速測試
將改裝后的電調發動機安裝在無人平臺上進行直線加速試驗。試驗在干燥、平坦的水泥路段上進行,從靜止加速至25 km/h,使用專用采集電腦采集試驗數據,結果如圖16所示。車輛從靜止開始加速,并變換三次擋位,發動機在每次離合器接合時均進行調速以適應變速箱輸入軸轉速,在換擋期間,變速箱輸出軸轉速隨車速勻速下降。由圖16可以看出,除了在起步時發動機轉速被拉低外,換擋結束離合器接合時發動機轉速與變速箱輸入軸轉速基本一致,離合器接合快速平穩,極大地提高了離合器接合速度,減小了換擋沖擊和換擋過程中車輛的動力損失,提高了整車動力性和經濟性。

圖16 車輛加速曲線
5.4 實車轉向測試
對無人履帶車輛進行直角彎轉向試驗,轉向前車速固定為10 km/h,此時發動機轉速在940 r/min左右,油門開度為21%。車速穩定后將左側轉向操縱桿拉到第一位置,直到車身轉過90°。轉向過程中發動機轉速曲線如圖17所示,拉動轉向操縱桿后,由于轉向阻力遠大與直駛阻力,發動機轉速快速下降,此時發動機調速特性為轉向時調速特性。轉向過程中油門開度保持21%不變,控制器快速調節發動機轉速,經過約1 s后重新穩定在940 r/min。

圖17 車輛轉向試驗
6 結論
本文依托某型履帶車輛改造的無人平臺,通過分析履帶平臺轉向和直駛兩種工況下對發動機調速特性的需求,提出在直駛時使用原機械調速發動機的調速特性,在轉向時改變發動機調速特性,避免發動機轉速隨負載增加而降低。對原機械調速發動機進行電控化改造。設計控制器以使柴油發動機具有可變調速特性功能。改裝后電調發動機通過試驗臺架測試,直駛工況下與原機械發動機調速特性相差4%以內;轉向工況下外界負載變化后快速響應,并迅速恢復穩定,轉速波動率小于10%。對安裝電控柴油機的無人履帶平臺進行加速和轉向測試,結果表明控制系統滿足無人車輛對發動機控制性能的需求。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15