三維掃描在直升機(jī)同軸度檢測(cè)與調(diào)整中的應(yīng)用
2022-12-28 14:15:54賈永康李奕鋒
賈永康,陳 晉,李奕鋒
(成都國(guó)營(yíng)錦江機(jī)器廠,四川 成都 610043)
近年來(lái),著眼備戰(zhàn)形勢(shì)需要,部隊(duì)飛行訓(xùn)練逐漸增加,越來(lái)越貼近實(shí)戰(zhàn),各型直升機(jī)面臨非正常損傷的概率增加,傳統(tǒng)修理方法已無(wú)法滿足新形勢(shì)下直升機(jī)基地級(jí)修理的需求。在未來(lái)很長(zhǎng)一段時(shí)間內(nèi),如何對(duì)非正常受損的直升機(jī)進(jìn)行修理,滿足非正常損傷直升機(jī)搶修保障需求,恢復(fù)裝備性能,挖掘裝備戰(zhàn)斗力,將成為基地級(jí)修理共同關(guān)注的重點(diǎn)。
尾傳動(dòng)軸同軸度檢測(cè)是直升機(jī)維修必須進(jìn)行的一項(xiàng)工作,直接關(guān)系到直升機(jī)振動(dòng)水平及飛行安全。目前一般采用百分表檢測(cè)法、光學(xué)檢測(cè)法,這些方法簡(jiǎn)單方便,操作性強(qiáng),但測(cè)量取點(diǎn)范圍小,無(wú)法直接測(cè)量尾傳動(dòng)軸整體同軸度情況,隨機(jī)誤差大。
尾傳動(dòng)軸同軸度檢測(cè)發(fā)現(xiàn)同軸度超差后,需進(jìn)行調(diào)整,使其恢復(fù)到出廠性能狀態(tài)。傳統(tǒng)維護(hù)、修理時(shí)一般通過(guò)調(diào)整尾傳動(dòng)軸支座位置或調(diào)整中減速器支座處墊片厚度的方法進(jìn)行調(diào)整,該方法具有局限性,無(wú)法適用于非正常受損直升機(jī)修理。三維激光掃描技術(shù)的出現(xiàn),則為解決該課題提供了一條很好的途徑。
三維激光掃描技術(shù)是20世紀(jì)90年代中期出現(xiàn)的一項(xiàng)新技術(shù),又稱“實(shí)景復(fù)制技術(shù)”[1-3],目前在國(guó)內(nèi)外發(fā)展迅猛,被喻為測(cè)量技術(shù)的一次“工業(yè)革命”。三維激光掃描技術(shù)主要應(yīng)用于物體外殼掃描,能夠快速計(jì)算出工件表面標(biāo)志點(diǎn)的精確三維空間坐標(biāo),形成一個(gè)全局坐標(biāo)系統(tǒng)后可與CAD模型進(jìn)行誤差比對(duì),實(shí)現(xiàn)大型工件快速三維檢測(cè)。與傳統(tǒng)測(cè)量方法相比,其具有精度高、速度快、逼近原型等特點(diǎn),可以真正做到直接從實(shí)物中進(jìn)行快速逆向三維數(shù)據(jù)采集及模型重構(gòu),無(wú)需進(jìn)行任何實(shí)物表面處理,其點(diǎn)云中的每個(gè)三維數(shù)據(jù)都是直接采集目標(biāo)的真實(shí)數(shù)據(jù),使得后期處理的數(shù)據(jù)完全真實(shí)可靠。近年來(lái),三維激光掃描技術(shù)應(yīng)用已從汽車領(lǐng)域逐漸滲透到航空領(lǐng)域,在航空設(shè)計(jì)、制造方面均有大量應(yīng)用實(shí)例,并取得較好效果。本文以加拿大生產(chǎn)的handyscan 700 系列手持式自定位掃描儀(如圖1)為對(duì)象,嘗試通過(guò)利用三維激光掃描技術(shù)檢測(cè)非正常損傷的直升機(jī)技術(shù)狀態(tài),以期為非正常損傷直升機(jī)尾傳動(dòng)軸同軸度檢測(cè)與調(diào)整提供新的方法和思路。

圖1 handyscan 700 系列手持式自定位掃描儀
1 三維激光掃描原理
三維掃描系統(tǒng)是集光、機(jī)、電、計(jì)算機(jī)技術(shù)為一體的新型掃描系統(tǒng),它主要用于空間物體外形、結(jié)構(gòu)及色彩的掃描,將物體立體信息變換為可以利用計(jì)算機(jī)直接進(jìn)行處理的信號(hào),獲得物體空間表面坐標(biāo),實(shí)現(xiàn)物體的三維掃描[4]。整個(gè)三維激光掃描測(cè)量系統(tǒng)主要由激光掃描儀、數(shù)碼相機(jī)、一字標(biāo)桿、十字標(biāo)桿、后處理軟件、電源系統(tǒng)及附屬設(shè)備組成。三維激光掃描技術(shù)的測(cè)量原理是由激光脈沖二極管發(fā)射的激光脈沖,經(jīng)過(guò)旋轉(zhuǎn)棱鏡,射向目標(biāo),探測(cè)區(qū)通過(guò)接收并記錄反射回來(lái)的激光脈沖信號(hào)來(lái)捕獲數(shù)據(jù),最后經(jīng)過(guò)軟件處理后建模輸出。激光掃描的過(guò)程,實(shí)際上就是一個(gè)不斷地進(jìn)行數(shù)據(jù)采集和處理的過(guò)程。通過(guò)具有一定分辨率的點(diǎn)與激光掃描設(shè)備構(gòu)成一個(gè)坐標(biāo)系。通過(guò)激光掃描測(cè)量系統(tǒng)的測(cè)角和測(cè)距從而計(jì)算出測(cè)點(diǎn)的三維坐標(biāo)(xP,yP,zP),如圖2所示,其中P點(diǎn)為地面掃描點(diǎn),地面三維掃描測(cè)量系統(tǒng)通過(guò)數(shù)據(jù)采集獲得距離觀測(cè)值S,精密時(shí)鐘控制編碼器同步實(shí)時(shí)測(cè)量出每個(gè)激光脈沖的橫向掃描角度觀測(cè)值α和縱向掃描觀測(cè)值θ。掃描測(cè)量系統(tǒng)在內(nèi)部坐標(biāo)系內(nèi)計(jì)算出P點(diǎn)的三維坐標(biāo)[5]。
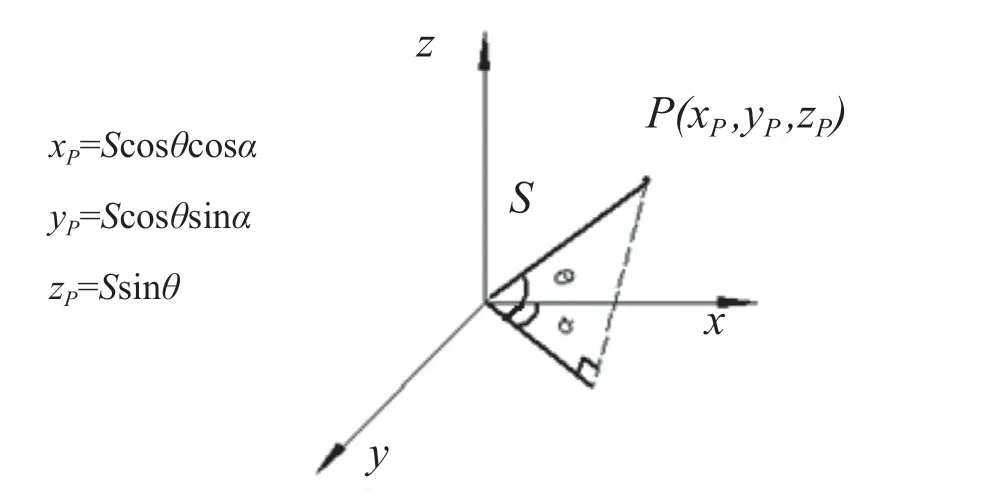
圖2 三維激光掃描技術(shù)測(cè)量三維坐標(biāo)
2 尾傳動(dòng)軸同軸度檢測(cè)方法
2.1 百分表檢測(cè)法
直升機(jī)尾傳動(dòng)軸分段布置,各段傳動(dòng)軸之間靠聯(lián)軸節(jié)連接以補(bǔ)償尾傳動(dòng)軸旋轉(zhuǎn)時(shí)的長(zhǎng)度變化和角度變化,從而滿足同軸度要求,若尾傳動(dòng)軸各段之間的同軸度超過(guò)一定限制,會(huì)使直升機(jī)振動(dòng)加大,傳動(dòng)軸承受應(yīng)力增大,影響飛行的安全性。百分表檢測(cè)主要是靠測(cè)量膜片聯(lián)軸節(jié)的角度偏差β是否在限度之內(nèi)來(lái)判斷同軸度是否合格,如圖3所示。
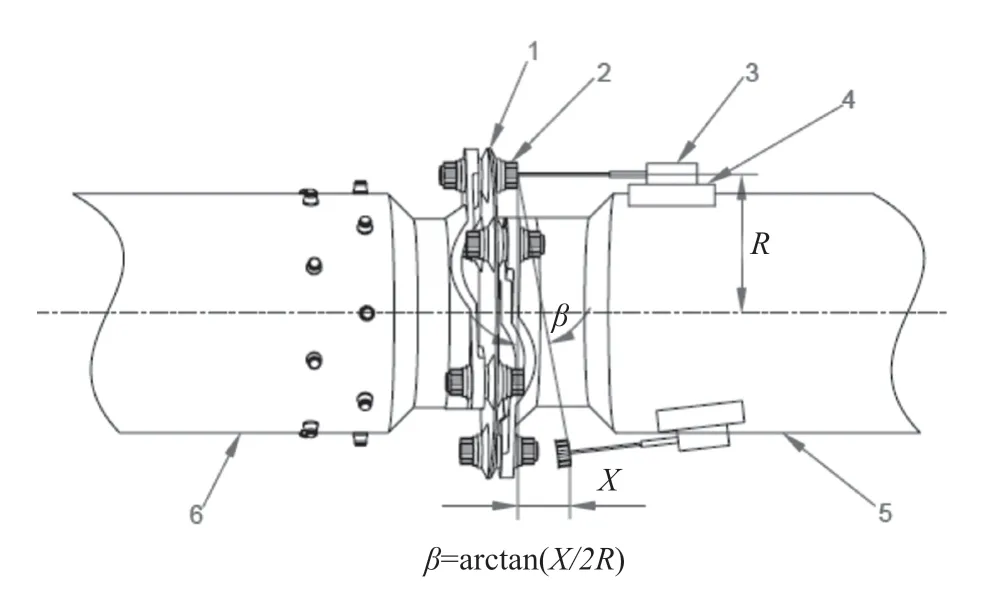
圖3 百分表檢測(cè)尾傳動(dòng)軸聯(lián)軸節(jié)角度偏差原理圖
2.2 光學(xué)檢測(cè)法
光學(xué)檢測(cè)法主要是在傳動(dòng)軸拆卸的情況下,用靶標(biāo)代替?zhèn)鲃?dòng)軸,利用準(zhǔn)直望遠(yuǎn)鏡或觀測(cè)瞄準(zhǔn)具進(jìn)行測(cè)量,如圖4所示。
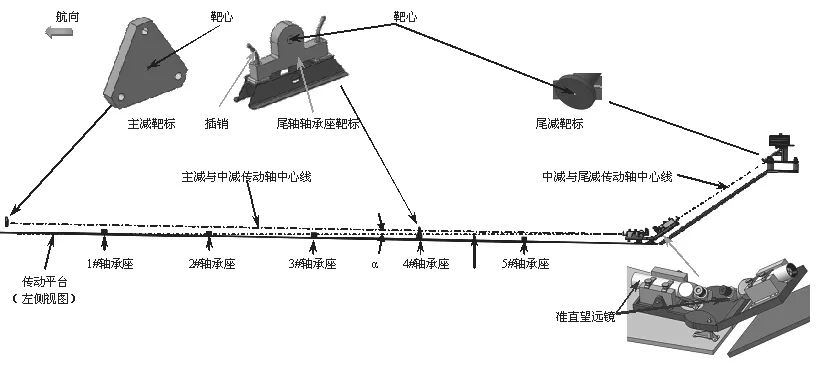
圖4 光學(xué)檢測(cè)尾傳動(dòng)軸聯(lián)軸節(jié)角度偏差原理圖
檢測(cè)時(shí),先將準(zhǔn)直望遠(yuǎn)鏡用夾具固定在中減速器處,通過(guò)調(diào)整望遠(yuǎn)鏡夾具高度,使得望遠(yuǎn)鏡“十字線交點(diǎn)”與裝于主減速器輸出法蘭盤的靶標(biāo)靶心對(duì)齊,然后依次將尾軸軸承座靶標(biāo)裝于各個(gè)軸承座,檢測(cè)靶心是否與望遠(yuǎn)鏡“十字線交點(diǎn)”對(duì)齊。
2.3 三維激光掃描檢測(cè)尾傳動(dòng)軸同軸度方法
2.3.1 設(shè)備組成
設(shè)備主要由攝影測(cè)量系統(tǒng)、手持式激光掃描儀、檢測(cè)軟件組成。
2.3.2 檢測(cè)方法
使用攝影測(cè)量系統(tǒng)對(duì)傳動(dòng)軸上的所有點(diǎn)拍照,獲取整個(gè)傳動(dòng)軸點(diǎn)云。
利用手持式激光掃描儀傳動(dòng)軸進(jìn)行面數(shù)據(jù)掃描,完成當(dāng)前狀態(tài)的掃描后,將傳動(dòng)軸旋轉(zhuǎn)約90度再進(jìn)行第二次面數(shù)據(jù)掃描。
最后分別將兩次掃描的面數(shù)據(jù)導(dǎo)出為stl(網(wǎng)格面數(shù)據(jù)格式,通用型格式)格式文件,導(dǎo)入檢測(cè)軟件。
檢測(cè)流程詳見(jiàn)圖5。
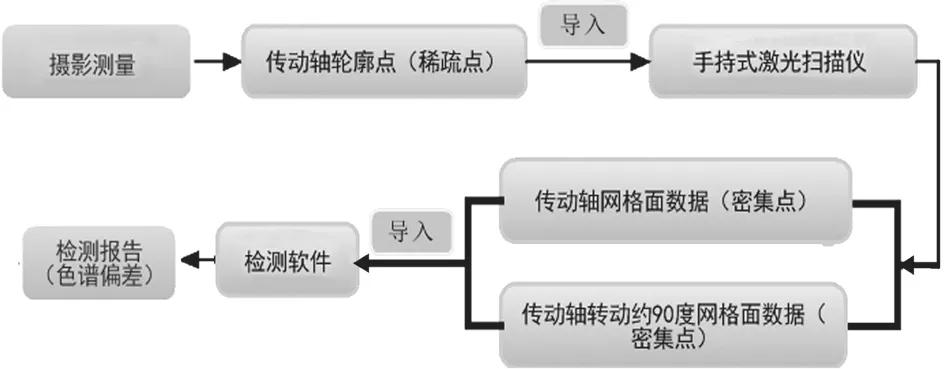
圖5 三維掃描檢測(cè)傳動(dòng)軸同軸度流程
根據(jù)三種直升機(jī)尾傳動(dòng)軸檢測(cè)方法的原理分析和技術(shù)特點(diǎn),可以總結(jié)出各自的優(yōu)缺點(diǎn)及發(fā)展趨勢(shì),如表1所示。
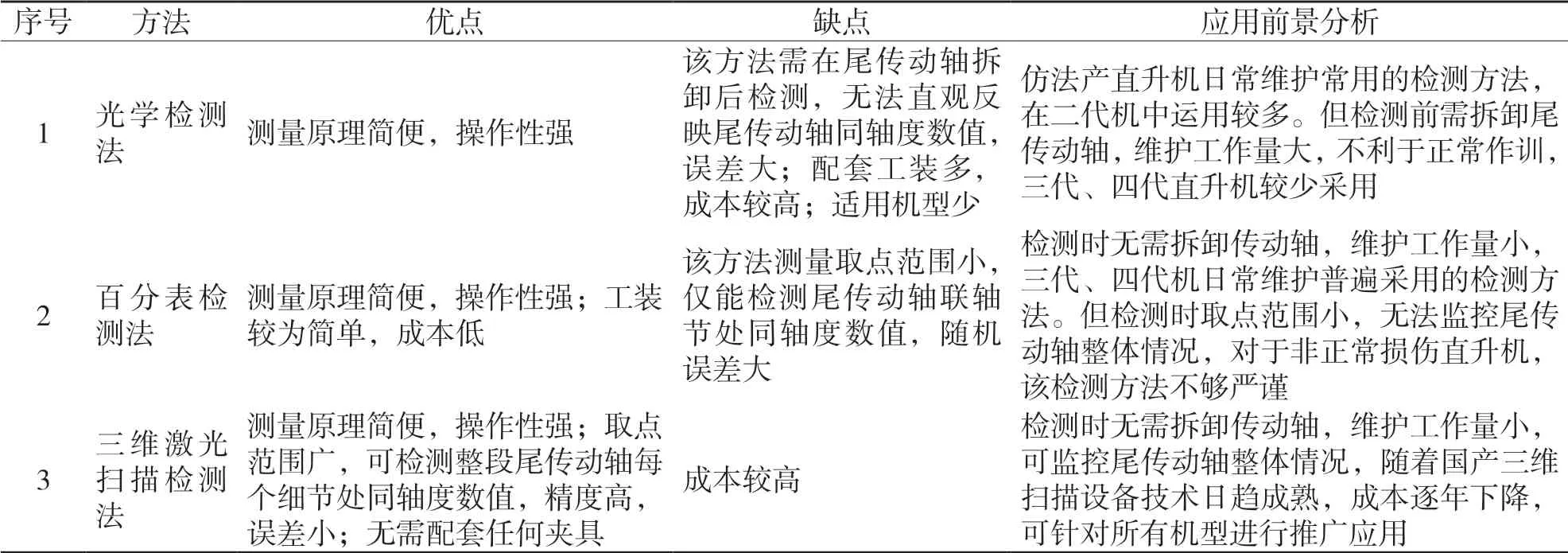
表1 三種尾傳動(dòng)軸檢測(cè)方法的優(yōu)缺點(diǎn)對(duì)比
3 直升機(jī)同軸度調(diào)整方法
3.1 正常直升機(jī)同軸度調(diào)整
采用以上檢測(cè)方法檢測(cè)正常直升機(jī)同軸度超差后,一般通過(guò)調(diào)整尾傳動(dòng)軸支座位置或調(diào)整中減速器支座處墊片厚度的方法可將同軸度調(diào)至目標(biāo)值。
3.2 非正常損傷直升機(jī)同軸度調(diào)整
非正常損傷直升機(jī)由于做機(jī)動(dòng)飛行或非正常著陸等造成尾梁、尾斜梁結(jié)構(gòu)變形,嚴(yán)重偏離直升機(jī)出廠狀態(tài)。檢測(cè)到直升機(jī)同軸度超差后,通過(guò)調(diào)整尾傳動(dòng)軸支座位置或調(diào)整中減速器支座處墊片厚度等傳統(tǒng)方法已無(wú)法將同軸度調(diào)至目標(biāo)值。而三維掃描技術(shù)可通過(guò)對(duì)變形情況進(jìn)行檢測(cè),檢測(cè)評(píng)估后對(duì)機(jī)體機(jī)構(gòu)進(jìn)行修復(fù),并增加調(diào)整點(diǎn)對(duì)中機(jī)身-尾梁、尾梁-尾斜梁相對(duì)位置進(jìn)行調(diào)整后,結(jié)合傳統(tǒng)方法可使尾傳動(dòng)軸同軸度恢復(fù)至出廠水平。
3.2.1 中機(jī)身-尾梁相對(duì)位置調(diào)整
中機(jī)身-尾梁相對(duì)位置變化主要是尾梁變形導(dǎo)致,并間接導(dǎo)致尾傳動(dòng)軸同軸度超差故障,理論上可在中機(jī)身與尾梁對(duì)接的地方加裝楔形墊片進(jìn)行補(bǔ)償(如圖6),但是由于尾梁變形量無(wú)法確認(rèn),無(wú)法精確計(jì)算加裝的楔形墊片厚度,需反復(fù)嘗試,因此,中機(jī)身與尾梁需多次拆卸。按照技術(shù)規(guī)定,拆卸達(dá)到規(guī)定的三次就需更換整套對(duì)接螺栓,造成人力和航材浪費(fèi)。利用三維掃描技術(shù),可解決該問(wèn)題,具體作業(yè)流程如下所示。
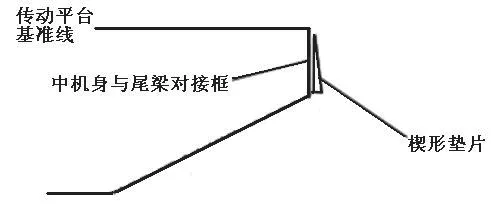
圖6 中機(jī)身與尾梁對(duì)接框處安裝楔形墊片示意圖
① 將該系統(tǒng)附帶的一字標(biāo)桿、十字標(biāo)桿和標(biāo)識(shí)點(diǎn)貼在所測(cè)部位的表面,調(diào)整相機(jī)的光圈和焦距,對(duì)所測(cè)部位進(jìn)行拍照。
② 將拍攝的照片導(dǎo)入三維計(jì)算軟件(比如3D-Metric)中進(jìn)行運(yùn)算,獲取整個(gè)測(cè)量區(qū)域的空間點(diǎn)分布。
③ 將獲取的空間點(diǎn)分布數(shù)據(jù)導(dǎo)入三維測(cè)繪軟件(比如VXelements),調(diào)節(jié)三維激光掃描儀的快門、分辨率、激光束類型等參數(shù),以獲取的空間點(diǎn)分布為基礎(chǔ),對(duì)尾梁外形進(jìn)行測(cè)繪,獲取三維模型并與理論模型進(jìn)行比對(duì),得出具體變形部位、變形量。
④ 對(duì)變形部位進(jìn)行矯正、修理,通過(guò)變形量計(jì)算中機(jī)身與尾梁對(duì)接地方的楔形墊片厚度。
3.2.2 尾梁-尾斜梁相對(duì)位置調(diào)整
尾梁-尾斜梁相對(duì)位置變化主要體現(xiàn)為尾梁-尾斜梁對(duì)接處夾角尺寸超差。由于尾梁平面與尾斜梁平面屬于未發(fā)生相交的空間面,制造出廠前,通過(guò)制作專用大型工裝夾具保證該夾角達(dá)到規(guī)定值144°(如圖7),制造出廠后尾梁平面與尾斜梁平面均加裝了鈑金結(jié)構(gòu)、導(dǎo)管、鉚釘?shù)龋虼嗽谥鄙龣C(jī)修理時(shí)工裝夾具已無(wú)法進(jìn)行測(cè)量,給該夾角恢復(fù)調(diào)整帶來(lái)困難。而采用三維掃描技術(shù)可避免鈑金結(jié)構(gòu)、導(dǎo)管、鉚釘?shù)鹊挠绊懀芍苯訏呙柙搳A角模型,將模型導(dǎo)入CATIA軟件,根據(jù)模型特征提取尾梁、尾斜梁平面后,直接讀取夾角值,可精確到0.01°。根據(jù)測(cè)量的夾角值,調(diào)整尾梁-尾斜梁處連接接頭,使該尾梁-尾斜梁夾角恢復(fù)至規(guī)定值144°。
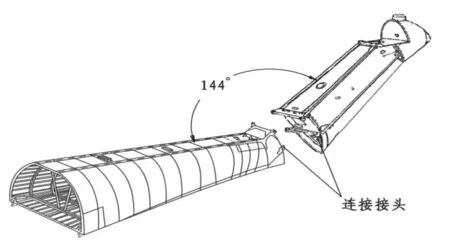
圖7 尾梁與斜梁的夾角示意圖
4 結(jié)論
基于三維掃描技術(shù)的直升機(jī)尾傳動(dòng)軸同軸度檢測(cè)方法無(wú)需配套任何夾具,測(cè)量精度高,能直觀反映整段尾傳動(dòng)軸偏差的真實(shí)情況,為尾傳動(dòng)軸同軸度檢測(cè)提供一種新的思路和方法。
利用三維掃描技術(shù)可實(shí)現(xiàn)直升機(jī)中機(jī)身-尾梁、尾梁-尾斜梁相對(duì)位置調(diào)整,對(duì)非正常受損的直升機(jī)修理具有重要意義。目前,基于三維掃描技術(shù)對(duì)直升機(jī)尾傳動(dòng)軸同軸度檢測(cè)與調(diào)整的方法,已在某非正常受損國(guó)產(chǎn)運(yùn)輸直升機(jī)特殊修理時(shí)進(jìn)行運(yùn)用,經(jīng)試飛驗(yàn)證,傳動(dòng)軸同軸度及振動(dòng)數(shù)據(jù)均符合技術(shù)要求,直升機(jī)修復(fù)后使用良好,振動(dòng)水平低,效果顯著。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
 長(zhǎng)沙航空職業(yè)技術(shù)學(xué)院學(xué)報(bào)2022年4期
長(zhǎng)沙航空職業(yè)技術(shù)學(xué)院學(xué)報(bào)2022年4期
- 長(zhǎng)沙航空職業(yè)技術(shù)學(xué)院學(xué)報(bào)的其它文章
- 軍民融合背景下我國(guó)通航空域管理保障體系構(gòu)建與實(shí)踐探索
- 政府信息公開(kāi)中過(guò)程性信息的司法認(rèn)定
- 高職英語(yǔ)“課程思政”:意義、現(xiàn)狀與建設(shè)路徑剖析
- 高職C語(yǔ)言有效落實(shí)課程思政的對(duì)策研究
- “雙高”建設(shè)背景下高職電子類專業(yè)1+X證書(shū)制度的實(shí)施路徑研究
- 本科層次職業(yè)教育專業(yè)教學(xué)標(biāo)準(zhǔn)的特點(diǎn)、內(nèi)涵和開(kāi)發(fā)途徑