域控制技術在新能源專用車上的應用開發與技術研究
2022-12-29 00:00:00趙斌良蔣國琛
專用汽車 2022年7期



摘要:主要針對新能源專用車電控系統架構和控制策略的技術路線和發展趨勢,結合最新的域控制技術,提出域控制器在新能源專用車上的系統解決方案。新能源環衛車已進入快速發展階段,掌握三電系統控制技術與核心算法才能在未來專用車市場上占據領先地位。隨著控制器芯片算力快速提升和車聯網技術的應用,智能環衛車既需要更多傳感器件,又需要軟件與硬件的解耦,還需要整車算力向域控制器集中。域控制器技術應用提升了整車性能,縮短了開發周期,實現了快速響應客戶多元化需求。
關鍵詞:域控制器;新能源專用車;應用開發
中圖分類號:U464.149收稿日期:2022-06-19
DOI: 10.19999/j.cnki.1004-0226.2022.07.016
1前言
21世紀初期,中國CO2排放量及占比快速提升。近年來增速有所放緩,至2019年中國CO2排放量達98.26億t,占世界CO,總排放總量的28.76%。“2030碳達峰、2060碳中和”已上升至前所未有的高度,成為大國崛起的必要籌碼。
《新能源汽車產業發展規劃(2021-2035年)》要求,從2021年起,國家生態文明試驗區、大氣污染防治重點區域新增或更新公交、出租、物流配送等公共領域車輛,新能源汽車比例不低于80%。
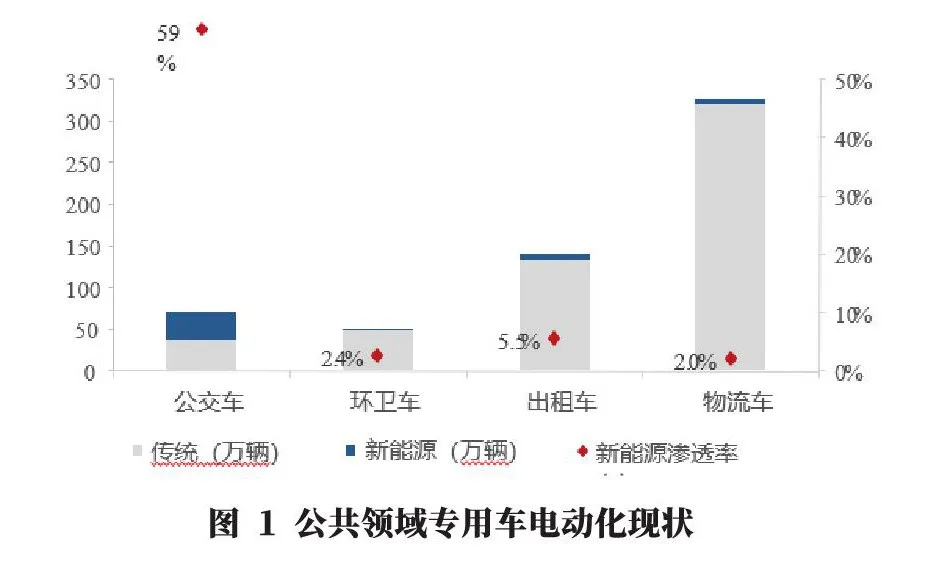
公共領域車輛油耗及排量都比較大,碳減排貢獻潛力大。但目前的新能源替代率遠低于80%的政策目標。其中,環衛車的新能源替代占比僅2.4%,如圖1所示。
環衛車屬于專用車,多采用中型或重型底盤,以大排量為主,同時考慮作業特點,環衛車安裝副發動機從底盤取力驅動上裝作業,進一步增加環衛車單車排量。僅僅一輛18t燃油洗掃車一年的碳排放就是50t,相當于15輛乘用車的碳排放總和。
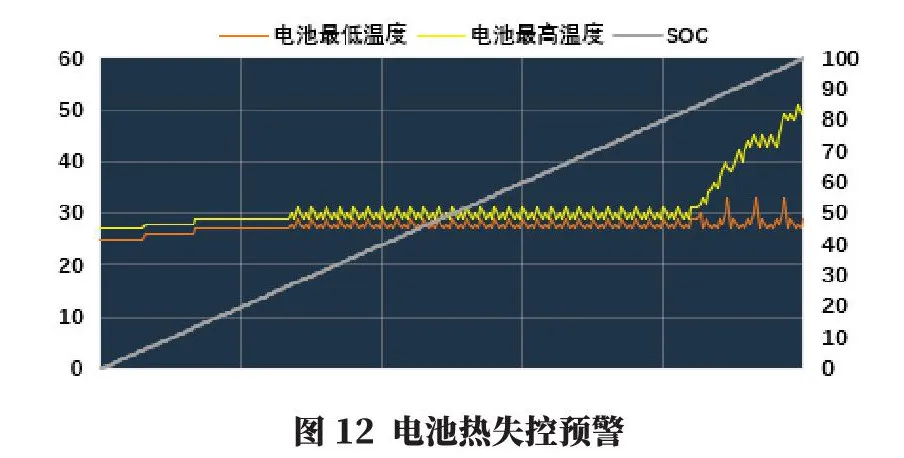
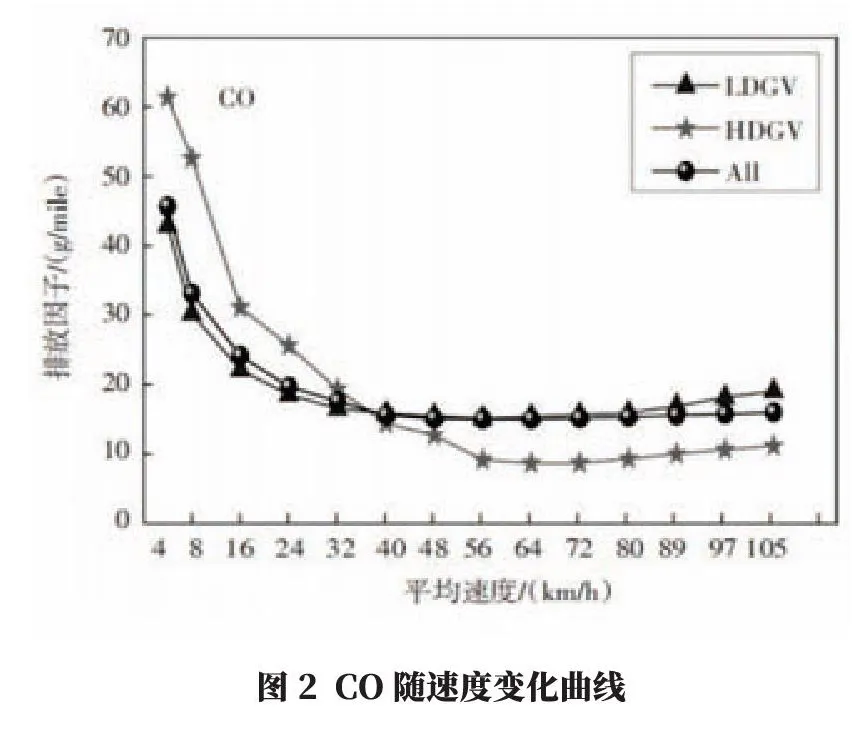
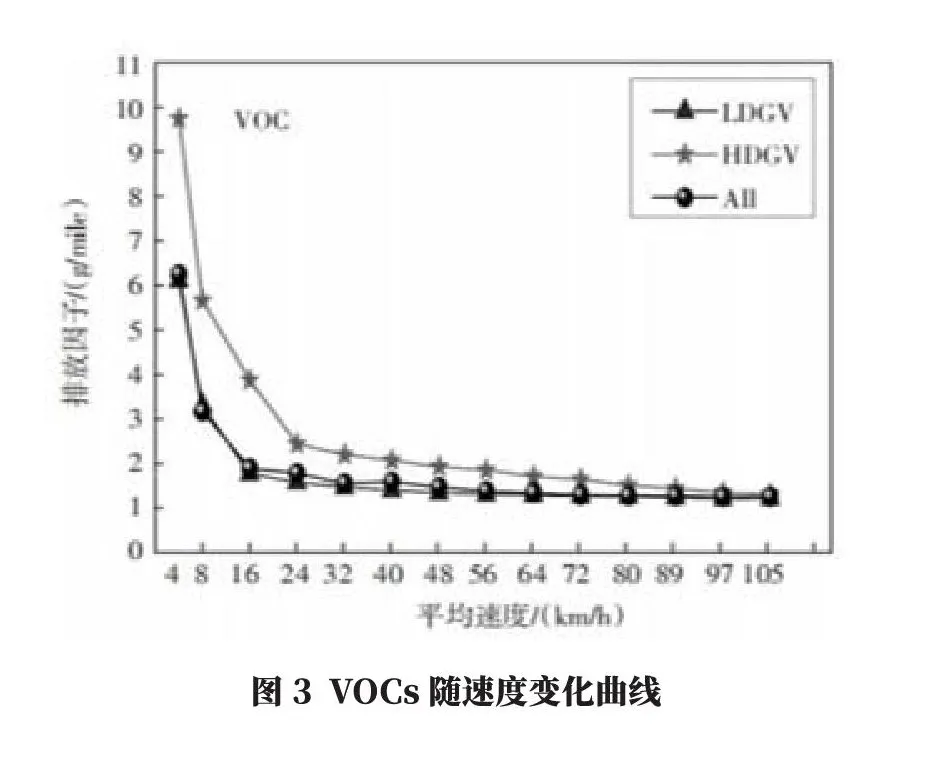
環衛車還屬于低速運行車輛,運行時速一般不超過20 kan2TbV2bFvCUdlWT8ufeyQ==m/h且經常處于怠速狀態,這不僅會增加油耗,還會使尾氣排放量增大,CO和VOCs排放濃度也會隨之升高。低速運行的環衛車輛往往造成更大的污染物排放,如圖2、圖3所示。
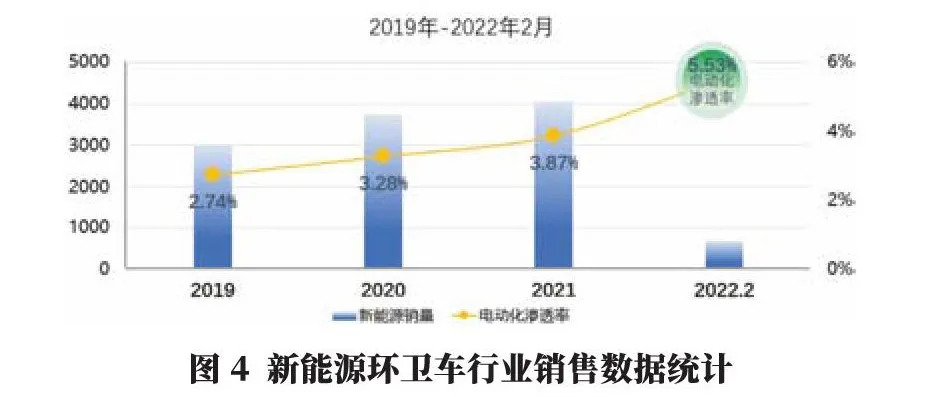
為解決傳統環衛車造成的污染及能耗問題,并響應國家政策,環衛車的電動化研究是重要的解決途徑。截至目前我國新能源環衛車保有量大約為1.2萬輛,今年的電動化滲透率預計增加到5.53%,如圖4所示。未來5年的電動化滲透率預計都在10%以上,2025年的滲透率預計達到20%以上,到2035年環衛車基本實現電動化。如果將我國現有的50多萬臺環衛車全部電動化,每年可減排CO,超過1100萬t。
過去5年我國環衛車的平均增長率為12.1%,未來5年的平均增長率將在9%以上,平均作業時間也會隨著自動駕駛環衛車的到來而大幅增加。隨著未來汽車“四化”的提出,電動化、智能化、網聯化、共享化已經成為汽車未來產業公認的發展方向,而軟件是“四化”的核心技術之一甲,未來汽車功能的70%都是軟件定義,未來企業利潤中的70%都是數據服務創造的。
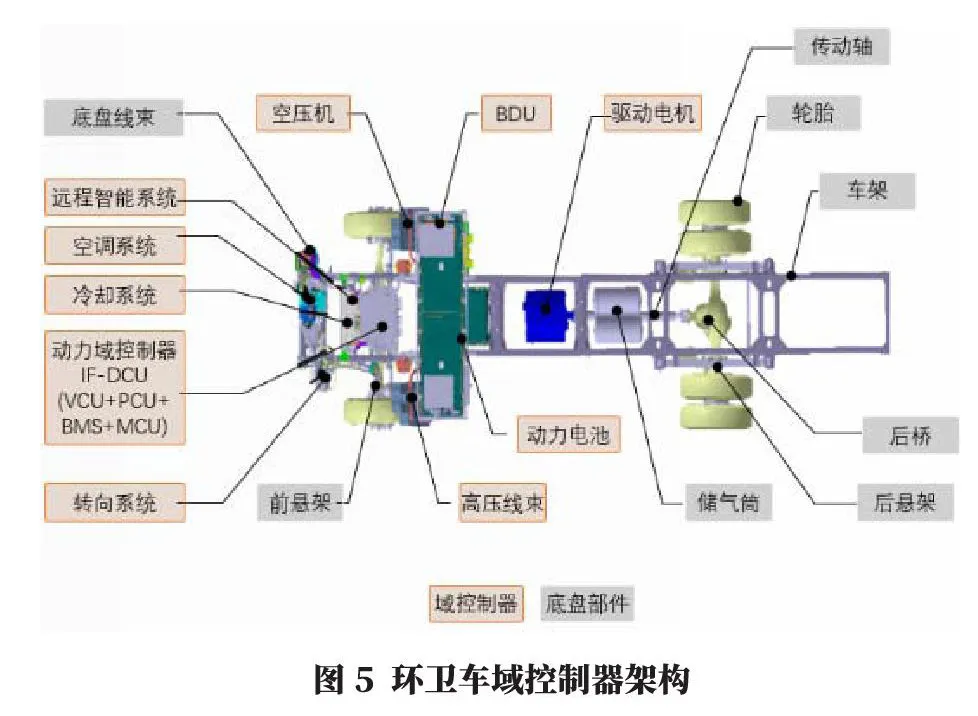
未來的技術方向是以整車域控制技術為核心,采用集中式電子電氣架構、大數據分析技術,基于底盤上裝全新一體化整車設計理念,實現硬件平臺化、軟件集成化、模塊標準化、產品場景化的全新技術。環衛車整車域控制器架構如圖5所示。
2專用車電子電氣架構現狀
專用車目前采用的依舊是基于ECU控制的傳統電子電氣架構。上世紀80年代,隨著IT技術的初步興起,在當時以機械為主宰的汽車行業掀起了一場汽車電子電氣化革命。電子控制單元(Electronic Control Unit,ECU)迅猛發展,從防抱死制動系統、四輪驅動系統、電控自動變速器、主動懸架系統、安全氣囊系統,逐漸延伸到車身安全、網絡、娛樂和傳感控制等系統,成為了汽車的重要組成部分[1-2]。
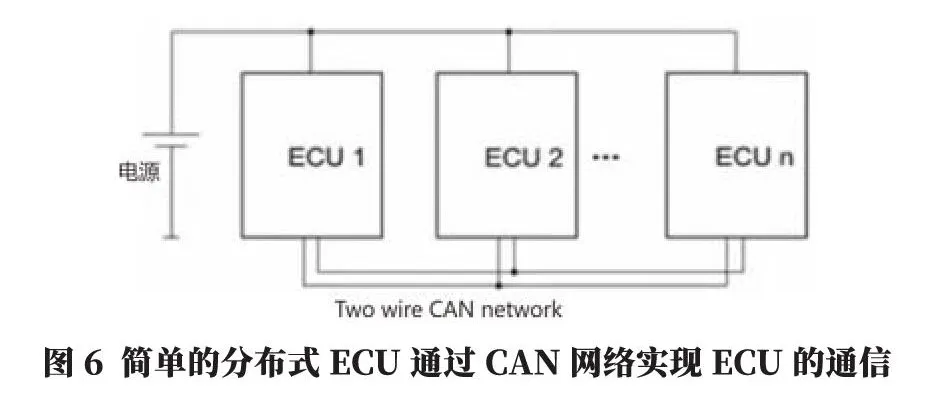
ECU通常用簡單的MCU芯片來實現,每個ECU通常只負責控制一個單一的功能單元,各個ECU之間通過CAN總線或者LIN總線連接在一起,通過廠商預先定義好的通信協議交換信息。因此這個時期的汽車電。子電氣架構也稱為“分布式EEA”,如圖6所示。
隨著汽車“四化”對汽車電子電氣架構要求越來越高,傳統的分布式EEA架構體現出很多不足之處:
a.效率低下。每個系統都在開發各自的控制器,車輛控制單元數量劇烈增加。
b.維護困難。ECU控制器數量過多,信號接口復雜,匹配困難。
c.低復用性。功能相近的系統無法復用控制器,零件及系統缺少前期完整規劃,不同產品需要開發新的控制器,產品復用率低。
d.軟硬件緊耦合。每個ECU都與某個具體功能緊緊綁定在一起,無法實現橫跨多個ECU/傳感器的復雜功能,也無法通過OTA來持續更新汽車上的軟件系統。在軟件定義汽車的時代,持續的整車在線升級OTA和模塊之間互相通信融合變得異常重要,顯然ECU之間的信息孤島問題會嚴重制約和阻礙這一趨勢。
上述這些問題和挑戰,在汽車“四化”的發展背景下是質量、成本和時間的天敵。要解決這一問題,最有效的辦法就是將多個分散的小傳感器集成為功能更強的單個傳感器,將多個分散的ECU按照功能域劃分,集成到一個運算能力更強大的域控制器(Domain ControlUnit, DCU)中。這一思想直接開啟了汽車電子電氣架構從“分布式=>(跨)域集中式=>中央+區域集中式”的升級和進化序幕。
3汽車電子電氣架構的演進趨勢
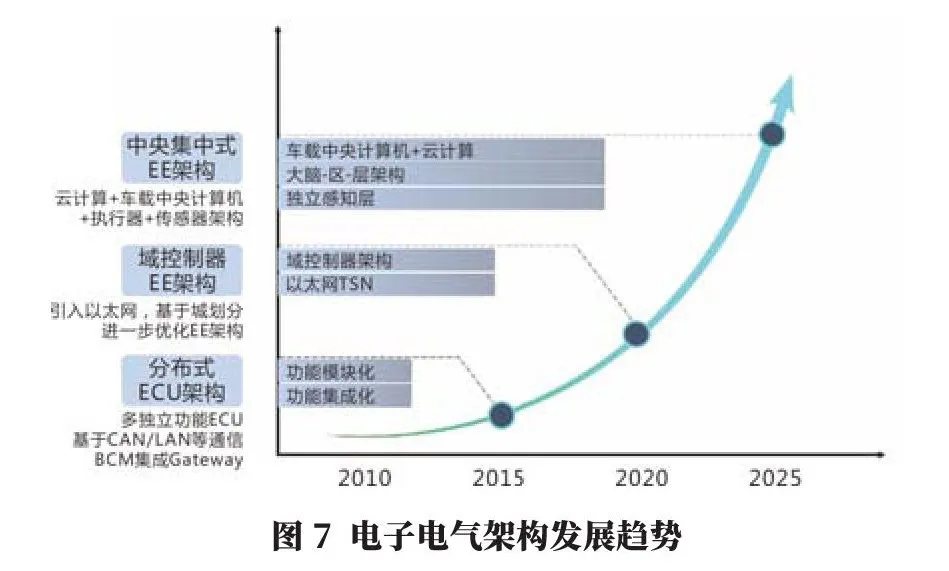
傳統的商業模式正在重構,汽車制造商開始向汽車服務提供商的角色轉變。傳統的汽車是基于EE架構(也就是總線+分散控制的架構)設計,智能網聯電動汽車將采用分布式網絡+域控制器的架構,也就是通信界提到的CC架構(計算+通信)。汽車的安全觀念已經從傳統的整車安全上升到網絡安全和信息安全。電子電氣架構發展趨勢如圖7所示。
對于功能域的具體劃分,各汽車主機廠家會根據自身的設計理念差異而劃分成幾個不同的域。比如BOSCH劃分為五個域:動力域(Power Train)、底盤域(Chassis)、車身域(Body/Comfort)、座艙域(Cockpit/Info-tainment)、自動駕駛域(ADAS)。這也就是最常見的五域集中式EEA。
伴隨著域主控處理器性能的進一步增強,對主處理器需求比較類似的多個不同功能域可以進一步融合成一個功能域,也即融合成“跨域集中式EE架構”。隨著功能域的深度融合后,功能域(Function Domain)的概念將逐漸消失,域主控處理器演變為更加通用的計算平臺,這就是車載“中央+區域(Central & Zonal)EEA”,也,稱為“中央集中式EEA”。
域控制技術為何是大勢所趨?針對環衛行業,原因有5個。
a.根據摩爾定律,芯片的算力每隔18個月性能就提升一倍。所以原先多個ECU才能實現的整車功能現在一個域控制器上就可以順暢運行。
b.根據梅特卡夫定律,車聯網的價值隨著鏈接數增加而倍增,即將到來的智能駕駛環衛車要求更多傳感器件和更高算力,算力向中央集中,向域控制器集中。
c.電氣系統的高度集成推動了軟件與硬件解耦,需要域控制器將整車級的控制策略與執行層的接口標準化。新能源動力系統都是全新的技術和零部件,不會涉及來自傳統汽車電氣架構和功能定義變更的巨大阻力,可以快速實現動力域的功能融合。
d.傳統的ECU的算力不能協同,分離的嵌入式OS和應用程序由不同供應商開發,無法統一維護。同時市場迫切需要環衛車公司縮短開發周期,快速響應客戶多元化需求,域控制器技術應用而生。
e.在基于域控制器的域集中式EEA中,傳感器。ECU與功能特性不再是一對一的關系,也就意味著傳感器與數據處理被分離開來。這點變化帶來了諸多好處,包括:集中式管理起來比較容易;更高的集成度可以減少ECU的數量,平臺的可擴展性也會更好;在更強大的域主控處理器上可以運行更復雜的傳感器融合算法,使得實現跨多個傳感器的復雜功能成為可能。域控制器及其架構如圖8所示。
4 現階段環衛車的問題
現階段的環衛車市場,新能源的發展還處于初期階段,電子電氣架構依舊在使用分布式ECU架構,在能耗、控制邏輯、電氣架構售后維護、控制策略升級等方面都存在較大的問題。
在能耗方面,大部分環衛車是燃油車,相比電動環衛車有更高的整車購置成本。同時,電動環衛車還能通過電控策略實現滑動能量回收和制動能量回收,進一步提升電能的利用率。
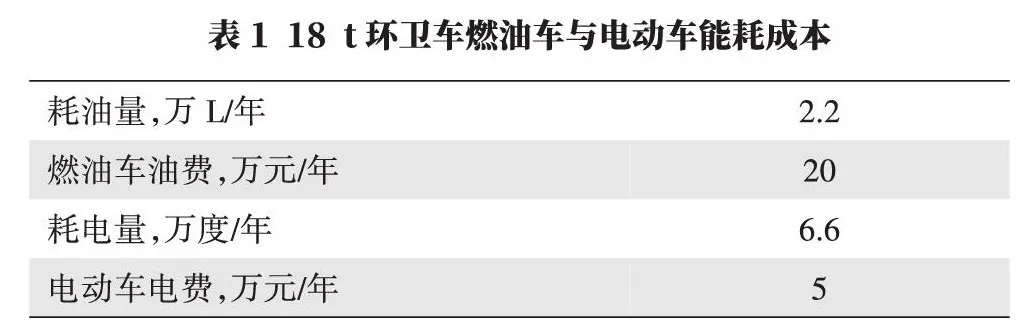
環衛車常用噸位為18t,每天運營120km,由于持續怠速作業,環衛車能耗水平相對較高。根據行業慣例,18t環衛車百公里油耗約50L,按照油電比1:3計算,百公里消耗電能150度。能源單價方面,柴油成本取最新油價9元/L,充電成本因為基本自建充電樁,不需要服務費,取工業用電均價0.76元/(kW.h)。以此計算出每年的能耗成本如表1所示。
在控制邏輯方面,現階段環衛車采用分布式ECU架構,上裝部分與底盤功能分離,控制邏輯也較為冗余。采用域控制器EEA的控制策略,可以集成整車的控制系統。整車控制器是新能源汽車的控制核心,負責整車安全、動力性能及能量管理,協調電池系統、電機系統及各種高低壓附件的高效作業。通過集成整車控制系統,可以標準化、規范化新能源環衛車的設計過程,從而能實現更短的開發周期,更快的需求方案,并可同時研發更多款車型,掌握關鍵技術,可積累自己的產品工程數據庫。
在電氣架構售后維護方面,傳統分布式電子電器架構由于沒有集成化,因此發生電子電氣故障時很難定位其原因,需要專業人士逐一排查。使用域控制器技術集成整車控制器后,可以建立統一的故障診斷系統,便于追查故障發生原因,從而降低維護成本。
從控制策略變更來講,由于分布式EEA沒有實現軟硬件解耦,因此無法通過OTA來升級控制策略或者變更控制策略,每次需要變更控制策略都需要前往產品所在地,使用硬件完成升級。而使用域控制器技術,可以實現軟硬件的解耦,從而通過OTA遠程升級電控軟件,實現控制策略的升級。
根據與環衛車設計制造的相關人員的交流,收集了包括技術人員、銷售人員、裝配人員以及售后服務人員等多個群體的反饋意見,得出現階段環衛車存在以下問題:
a.控制邏輯冗余,同樣車型不同工況需要多套控制邏輯。
b.控制策略升級換代后,無法遠程升級,需要售后服務人員到現場升級。
c.上裝與底盤關聯性不夠,電子電氣架構線束布局困難。
d.相比機械系統的售后維護,電子電氣部件的售后維護難以發現故障源頭。
5基于域控制器的優化解決辦法
針對以上環衛車提出的問題,以域控制器為核心,結合一體化設計理念和大數據分析方法,實現對控制邏輯、策略升級、整車布局、售后維護方法的優化。
5.1域控制器架構
新能源環衛車的域控制器架構,考慮到上裝部分,相比主流的五域集中式EEA和三域集中式EEA做出了自己的優化與改進,針對不同時延性和可靠性要求,將三域集中式EEA中的整車控制域劃分為動力域、底盤域、上裝域三部分。
動力域控制器和底盤域控制器都有比較固定的控制策略,而上裝控制器則會根據不同的環衛車類型設計不同的上裝域控制器策略。
隨著后續車載芯片的功能更加強大,動力域與底盤域將會融合為車輛運動域控制器。由于動力域和底盤域之間存在較多的協同控制,在智能汽車背景下,未來協調控制功能仍將大幅增加。這兩個域的功能安全和信息安全級別要求相似,可以合并到一個域控制器。
更進一步,動力域控制器可與網關融合,并集成上裝控制功能,成為車輛層級的集成型域控制器,或稱車輛計算機。由于相應功能域的安全等級要求不同,此種深程度域融合需要硬件虛擬化技術支持,以防止不同安全等級功能間的相互影響。
5.2軟硬件解耦與遠程升級策略
分布式ECU架構由于結構復雜,而且軟硬件耦合,在更改控制策略時需要考慮到很多安全層面的問題,因此需要專業人士切換控制策略并進行調試。
域控制器的軟件是高度集成的,軟件功能虛擬化和硬件簡化將進一步推進,一邊是將硬件整合到針對不同時延性和可靠性要求的堆棧中,一邊是一個“超級計算器”取代ECU(電子控制單元)的地位。
域控制器的設計思想是軟件定義功能,能夠實現資源與功能解耦,從而可以共享資源池;能夠實現軟件與硬件解耦,從而軟件可升級、硬件可更換,傳感器可擴展,如圖9所示。
由于域控制器軟硬件解耦,同類型的環衛車在不同工況下的控制策略更容易調整。不同工況下控制策略的切換,可通過更改軟件層面的標定參數來進行切換。軟件層的切換相比軟硬件結合的切換更簡單,可以結合座艙域讓用戶自行選擇所需要的控制模式,在座艙中控屏上一鍵切換工作模式。
控制策略升級換代后,無法遠程升級,需要售后服務人員到現場升級的問題,可以通過空中下載技術OTA(Over the Air在線升級)來實現。域控制器中的關鍵變。量是基于云數據的自動標定來學習的,支持OTA遠程升級,可遠程單獨刷新標定數據和最新版應用程序,極大縮短開發周期和后期維護成本。OTA遠程升級技術如圖10所示。
OTA是指通過服務器、移動通信網絡和終端等的網絡連接,最終實現終端內存儲數據的更新,進而改善終端的功能和服務的技術。這項技術最早應用在PC機上,后來廣泛應用在移動手機行業,在短短二三十年便廣泛應用于各自軟件升級、系統升級等。近幾年才開始在汽車行業里廣泛應用。
汽車行業由于ECU(電子控制單元)復雜以及安全顧慮,并沒有很快接受這項新技術。但是隨著域控制器技術在汽車行業的普及,越來越多的車企開始嘗試在汽車上使用OTA技術。
現在,新興的新能源車企如特斯拉、比亞迪、小鵬等都在研究通過OTA的方式實現改善車輛的底盤、信息娛樂、電池續航、ADAS乃至自動駕駛等多項功能的效果,讓車的功能選代更加靈活和便捷。
5.3一體化設計
從整車集成到電氣架構,再到軟硬件開發都要遵從自上而下、深度一體化的設計,解決了環衛車上裝和底盤關聯性不夠、空間利用率不足、線束布局困難等問題。
環衛車屬于專用車,相比物流車、公交車等,種類多,一體化難度大,在同一種型號的底盤上需要設計多種不同功能的環衛車上裝部分。比如相同噸位的垃圾壓縮車、洗掃車、除雪車、吸塵車、吸污車等,所采用的底盤相同,但是上裝部分由于結構不同需要差異化設計。
對于如此多的不同功能的上裝部分,不可能為每一種上裝功能單獨設計一款底盤,不論從零件的通用化還是量產的成本的角度考慮,使用一款底盤去做適配都是更經濟更高效的選擇。
采用域控制器的架構,有助于實現機械集成一體化、電氣集成一體化、軟件集成一體化、售后服務一體化四個一體化方向。
在機械一體化方向,使用域控制器有助于實現標準化、能量供給一體化,并協助完成安全設計一體化的目標。
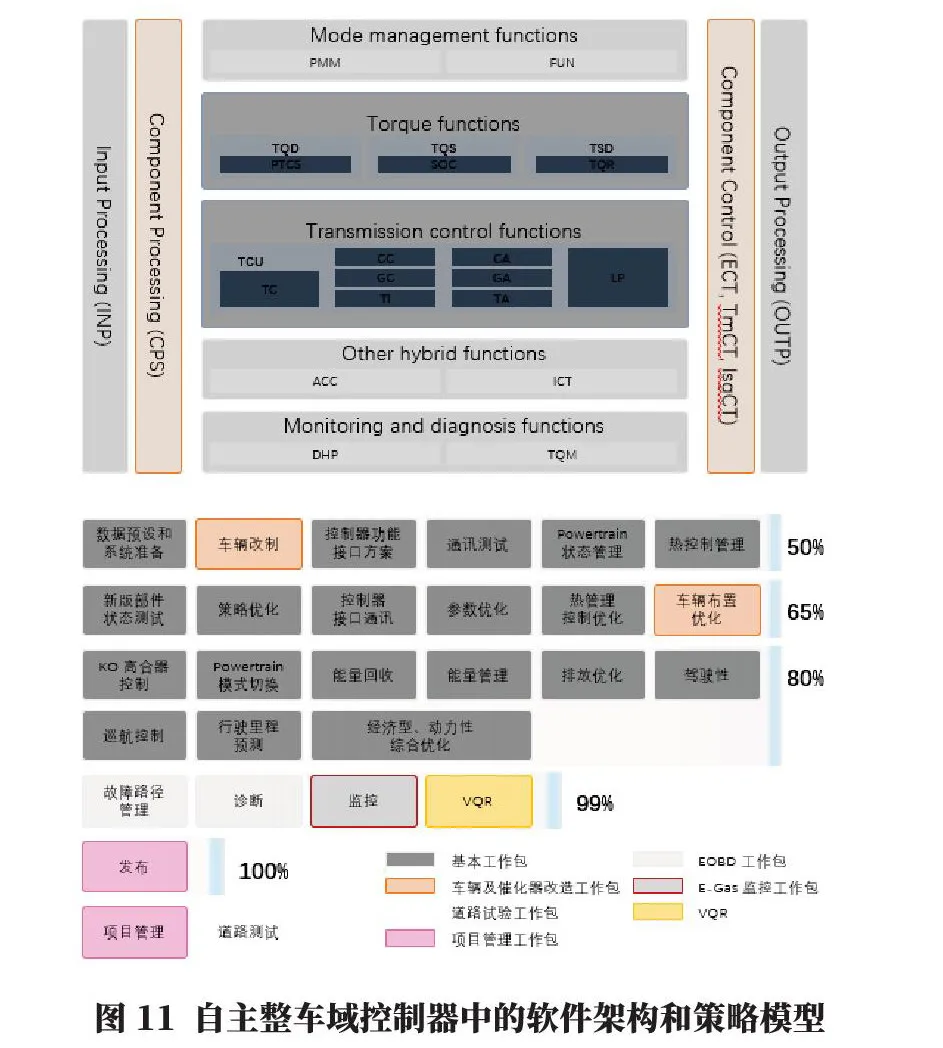
在電氣一體化方向,域控制器可以向區域控制器的方向過渡。區域控制器是一種新的控制器概念,不再以功能為導向劃分控制器的邊界,而是以車輛特定物理區域為導向定義控制器。采用區域控制器可以從兩個方面降低電子電氣架構的成本:a.將該區域內的功能型控制器集成區域控制器,實現驅動電機一體化,功率驅動一體化;b.由于區域控制器采用就近接線,減少了車輛的線束成本,實現線控系統模塊化,如圖11所示。
通過區域控制器向中央計算機的最終目標過渡的方案,平穩實現四個一體化設計理念,是提高新能源環衛車質量、降低成本的有力途徑。
5.4故障診斷系統
據統計,在傳統汽車維修過程中70%左右的時間用于查找故障,30%左右的時間用來排除故障。純電動汽車的電氣結構復雜,各子系統間通過CAN控制器局域網絡相互通信,當發生電子電氣或通信故障時,靠經驗及傳統手用工具等維修方法很難排除車輛故障。因此,對于純電動汽車而言,車載診斷系統的開發更有必要性[3]。結合大數據分析,使用域控制器技術實現故障診斷,然后用大數據平臺匯總數據實現故障診斷和故障預測系統,是提高新能源環衛車售后服務能力的有效方法。
當前新能源車依據國標32960的要求,需要上傳73項數據到國家大數據平臺,這些數據項主要運用于追蹤車輛行駛軌跡、電池能耗等運營項數據,實現車輛過檢和補貼。要求上傳的車輛故障數據很少,而且這些數據按照國標要求10s發送一次數據,時間間隔都比較長,如果將這些數據用于故障診斷,會出現較大的誤差。
使用域控制器技術替代分布式電子電氣架構后,可以設計集中式的故障診斷系統對車輛行駛過程中的數據進行診斷,從而擴大故障數據與狀態數據的樣本。通過域控制器對報文協議統一處理,就不需要對每個ECU進行單獨的處理,既節省了運算資源,也便于完成整車通信協議和高低壓電氣架構的自主開發。
基于域控制技術的集中式故障診斷系統,將故障數據和狀態參數從國標規定的73個擴展至300個以上,實現更加精細化的故障分類分解,實現故障等級的劃分,避免更為嚴重的事故4;還可以減少故障發送間隔時間,從國標規定的10s發送一次數據降低到100 ms發送一次數據,增加數據的精度。真正意義上實現了大數據采集與分析,也激活了大數據云平臺的數據增值業務。
基于上傳至企業大數據平臺的故障信息與狀態數據,我們可以實現遠程故障診斷,快速定位故障原因以及具體的故障排查方案。通過特定的算法,可以實現故障預警的功能,在不影響客戶使用情況下將故障消滅于萌芽,實現客戶零故障體驗。
譬如目前對電動車安全性能最重要的電池預警系統,可以通過機器學習、人工神經網絡、高斯回歸等方法,分析過溫、過壓、低電壓、低電流等情況,建立數學物理模型,并使用大數據平臺大量的庫存數據進行分析,從而實現對電池系統的故障檢測與預警5),電池熱失控預警,如圖12所示。
ZkEBOD2j4wwhy3gMmpZraPC3U9gqJJcglaJ14Cy+UBc=大數據平臺還可以通過行車數據指導產品正向開發,提供定制化解決方案。根據客戶運營車輛在具體城市和固定路線上的路況數據、氣候數據(干燥潮濕,年平均溫度高低)、充電樁配套信息(充電設施完善,可以減小電池包開支)、作業時間以及強度等信息,我們可以為客戶量身訂制符合客戶需求的最經濟或是單項性能最優的產品。
6結語
整車域控制技術,可以充分考慮各部件的能量管理和效率優化,高度集成的高壓模塊和低壓控制單元將最大限度減少整車能耗,降低客戶的購置成本和使用成本。
域控制器指導下的整車開發,從整車集成到電氣架構,再到軟硬件開發都要遵從自上而下、深度一體化的設計思路。實車上發現的任何問題都能追溯到具體是哪個設計環節的問題。即便是那些偶發的故障,也能快速鎖定問題范疇。
ECU 之間的通信在處理器內部,而不是通過CAN或LIN等外部網絡進行,這將大大減少數據延遲和系統復雜性,同時可以協同以往不同ECU的功能來達成更復雜更優秀的計算策略[6]。
從高壓系統多合一的功率驅動器,到低壓系統多合一的域控制器,高度的硬件集成和深度軟件集成帶來了超高的節能率。智能決策、自動控制、圖像識別、語音識,別、大數據分析等智能技術的應用,讓操控更便捷,讓客戶零故障感知,快速實現市場新技術客戶的新需求。
參考文獻:
[1]劉佳熙,丁鋒,面向未來汽車電子電氣架構的域控制器平臺[J].中國集成電路,2019,28(9):82-87.
[2]黎偉,俞曉勇,匡小軍、淺析汽車電子架構發展與典型域控制器[J]. 時代汽車,2021(16):163-164.
[3]曹紅,純電動汽車故障診斷系統開發[D].濟南:山東大學,2014.
[4]門磊,王剛,宋金夢,等,動力域控制器功能安全概念階段開發[J].中國汽車,2022(5):19-25.
[5]王震坡,李曉宇,袁昌貴,等,大數據下電動汽車動力電池故障診斷技術挑戰與發展趨勢[J].機械工程學報,2021,57(14):52-63.[6] Dingwang Wang, Subramaniam Ganesan. Automotive Domain Con- troller[C].2020 International Conference on Computing and Infor- mation Technology (ICCIT-1441).Tabuk , 2020:52-63.
作者簡介:
趙斌良,男,1980年生,工程師,研究方向為新能源底盤三電控制系統。