坦克炮控系統RBF神經網絡自適應魯棒控制方法研究
2023-01-03 04:36:50王一珉楊國來王麗群
振動與沖擊 2022年24期
王一珉, 楊國來, 王麗群
(南京理工大學 機械工程學院,南京 210094)
坦克具有攻防性能兼備,抗干擾能力高,集群戰斗力強等諸多優點,現在仍然是世界各國常規武器裝備中的首要兵器,在現代戰爭中起著非常重要的作用。坦克炮口擾動的影響因素十分復雜,包括了耳軸間隙、襯瓦搖架間隙、身管柔性等多因素,呈現典型非線性特征。同時,現代化戰爭也對坦克的高精度射擊提出了更高的要求,現代智能控制算法也被逐漸應用到坦克炮控系統之中[1-6]。由于車炮系統的非線性多因素未能被準確建模,使得控制器設計存在一些固有缺點。隨著近年來數值分析技術的發展,非線性有限元理論、多體系統剛柔耦合建模[7-10]等都得到進一步擴充,為復雜車炮系統動力學研究提供了條件。
王燁波等[11-12]通過設計自適應魯棒控制器,對優化目標進行穩定控制研究,然而未能準確考慮優化目標中的不確定因素對控制性能的影響,僅通過數學表述的方式進行了表達。胡鑫等[13]對帶有電動缸建模的坦克炮系統進行了隨動系統控制研究,但其建模中也未考慮到實際車炮多體系統的復雜情況。張博等[14]基于RBF(radial basis function)神經網絡設計了滑模控制器對永磁同步直線電機進行了位置控制,提出了基于RBF神經網絡的非線性觀測器。劉恒沙等[15]對影響火炮射擊穩定精度的參數進行了研究,通過仿真對全炮28個重要參數進行了靈敏度分析,為兼顧非線性多因素的火炮精細化建模指出了研究方向,但未綜合分析非線性多參數耦合對炮口擾動的影響。
對車炮系統的主要非線性因素[16-18]進行多體動力學建模,設計坦克炮控系統自適應魯棒控制器,對自適應魯棒控制中的未建模擾動進行補償,通過Matlab/Simulink與RecurDyn軟件中多體模型的聯合仿真驗證,提高坦克炮穩定精度,具有較高的抗擾動性與魯棒性,也具有重要的現實意義。
1 發射動力學建模與計算
1.1 車炮系統拓撲結構分析
行進間坦克車炮系統多體動力學的建模主要包括履帶、車身、炮塔、起落、后坐共5個組成部分。并且涉及到各總成之間的約束連接、裝配定位與路面接觸副的建立以及大規模復雜結構接觸問題的求解。
主要考慮的總成及連接關系,如圖1所示。
圖1 車炮系統主要總成連接方式的拓撲關系Fig.1 Topological diagram of the connection relationship in the vehicle-gun system
1.2 多因素建模基本假設
1.2.1 身管襯瓦接觸碰撞建模
在實際的坦克系統中,為了保證后坐過程的順暢,身管外壁與前后襯瓦之間會存在微小間隙[19]。坦克炮身管分別與前襯瓦、后襯瓦間隙接觸關系示意圖,如圖2所示。
圖2 身管-前后襯瓦間隙接觸模型示意Fig.2 Gap contact model between barrel and the bushings
采用非線性彈簧-阻尼模型來計算身管與襯瓦間的接觸碰撞力。其計算法向接觸力F的表達式為
(1)

(2)
式中:cmax為最大阻尼系數;dmax為最大穿透深度。
1.2.2 耳軸間隙接觸碰撞建模
在已有的車炮系統多體動力學建模中,通常將耳軸與耳軸軸承的關系簡化成以耳軸中心為鉸點的理想轉動副。但在實際運動中,忽略耳軸與耳軸軸承之間的接觸碰撞會導致較大的誤差。耳軸-耳軸軸承間隙接觸模型,如圖3所示。
圖3 耳軸-耳軸軸承間隙接觸模型示意Fig.3 Gap contact model between trunnion and bearing
考慮到耳軸與耳軸軸承之間的間隙較小,并不滿足Hertz接觸理論中的非協調接觸條件。本文根據含有間隙的旋轉鉸模型,采用含非線性剛度的接觸碰撞算法計算耳軸軸承間的接觸力,其表達式如下
(3)
式中,K為剛度系數,其表達式為
(4)
式中:E*為復合彈性模量;第二項為碰撞過程中的阻尼力項,對碰撞時的能量損失進行了描述;D為阻尼系數,其表達式為
(5)
式中,ce為碰撞恢復系數。
1.2.3 身管柔性體建模
現代坦克炮可視為長徑較大的薄壁空心梁,炮控系統控制精度受其彈性影響較大。坦克炮身管的材料主要是均質炮鋼。身管是一種管狀結構,內部半徑恒定,外部半徑逐漸增大。
根據Euker-Bernoulli梁理論,彎矩M(x,t)與撓度y(x,t)的關系可以表示為
(6)
式中:E為炮鋼的楊氏模量;Ix為截面轉動慣量。變截面身管的橫向自由振動微分方程表示為
(7)
式中,ρ為炮鋼密度。
設身管的垂直變形為簡諧振動,滿足y(x,t)=W(x)cosωt,則身管的最大動能為
(8)
不計剪切力做功,身管應變能為
(9)
由于ymax(x,t)=W(x),轉角θ非常小時有
(10)
結合式(8)和式(10)計算可得Riley quotient為
(11)
設W(x)滿足
W(x)=[φ1(x),φ2(x),…,φN(x)]·
[a1,a2,…,aN]T
(12)
式中:φi(x)為滿足邊界條件的線性無關函數;ai為待定系數,可由式(13)求得
(13)
因此,變截面身管的固有頻率ω可以計算出來,并可以計算得到模態函數W(x)。
本研究在有限元軟件Hypermesh中采用了8節點六面體單元對坦克身管進行網格劃分,如圖4所示。身管有限元模型共148 140個網格,184 380個節點。同時,利用RecurDyn中提供的FFlex完全柔性體法[20]對身管進行柔性化建模,并將柔性身管的末端與剛性體炮尾通過界面節點約束進行固定連接,后將身管外壁與前后襯瓦通過用戶子程序定義接觸約束,如圖5所示。

圖4 身管有限元模型Fig.4 Finite element model of the barrel
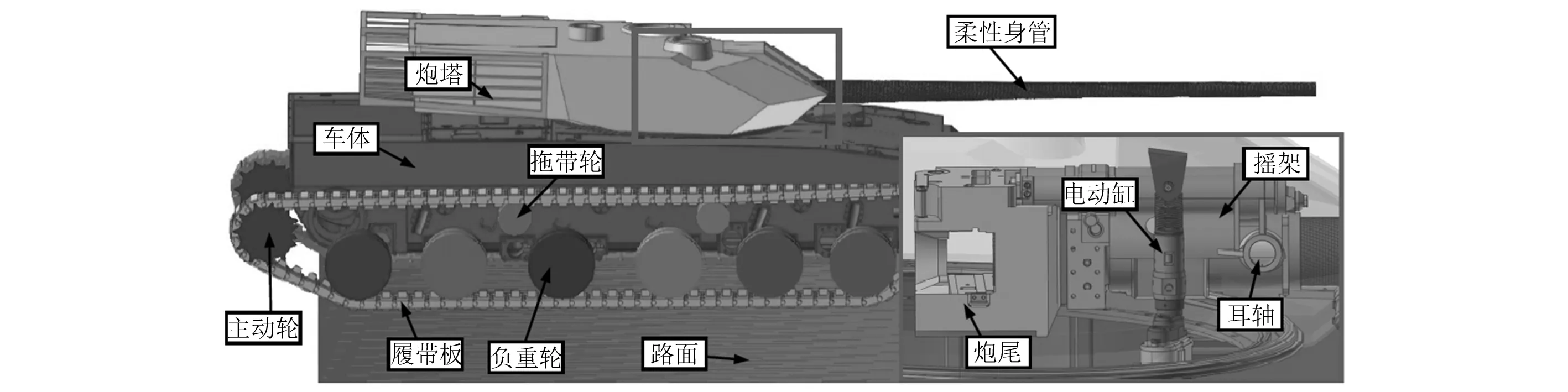
圖5 利用RecurDyn軟件搭建的車炮系統多體動力學模型Fig.5 Multibody dynamics model of the vehicle-gun system built in RecurDyn
1.3 路面不平度建模
根據路面實際統計特征,路面粗糙度信號為平穩高斯過程。其統計特性通常通過頻率域的功率譜密度給出。路面不平度的功率譜密度擬合公式如下
(14)
式中:n為空間頻率;n0為參考空間頻率;Gq(n0)為路面不平度系數;w為頻率指數。
本文基于MATLAB軟件中的數學工具利用諧波疊加法編寫路面不平度隨機生成程序對路面進行重構,分別建立了長為300 m,寬10 m的D級和F級兩種路面模型。D級路面三維剖面,如圖6所示。
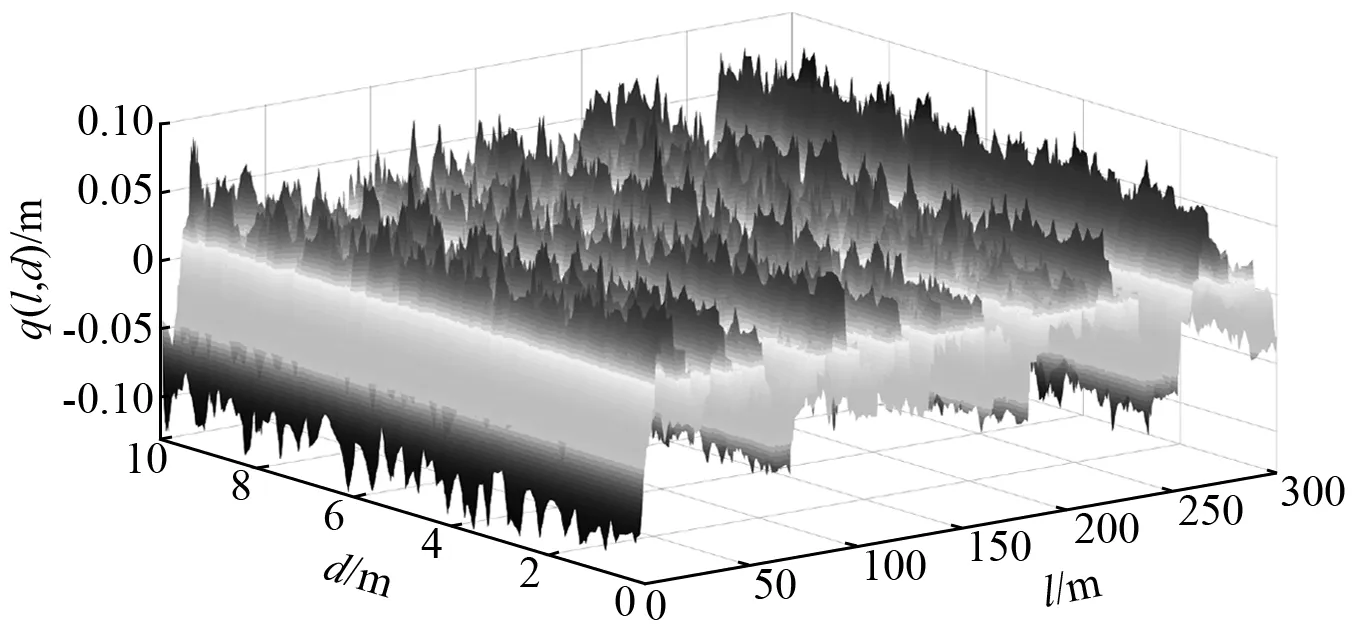
圖6 D級路面三維剖面Fig.6 D-level road profile in three-dimensional plot
2 高低向穩定器自適應魯棒控制建模與分析
2.1 坦克高低向系統數學模型與動力學分析
根據圖7所示的坦克高低向系統進行受力分析,可以得到坦克炮身管的高低向運動方程
Jβ=Te-Bω-Tf
(15)
式中:J為坦克炮全部俯仰部分折算在電機輸出軸處的轉動慣量;β為電動缸電機輸出軸的角加速度;Te為電機輸出端的轉矩,其與驅動器輸入的電壓指令成近似比例關系,設Kt為電壓轉矩系數,則有Te=Ktu;Tf為坦克高低向系統折算到電機輸出端的負載力矩;B為電機黏滯摩擦因數。
圖7 坦克高低向系統主要總成結構模型Fig.7 Main structure model of tank vertical system
Jβ=Ktu-Bω-Tf
(16)
(17)

(18)
式中,u0為誤差反饋律。定義系統不確定參數θ=[θ1,θ2]T,有如下假設
(19)
(20)
式中:z1為高低向穩定系統的角度誤差;x1d為角度控制指令;k1為反饋增益。
因此,需要控制z2盡可能小,使系統的角誤差和速度誤差均有更好的表現。
2.2 坦克高低向系統自適應魯棒控制器設計
按照如下方法設計控制器,使得z2趨近于0。
(21)
由此,設計如下控制器
(22)

(23)

(24)
(25)

(26)


(27)
式中,k2s2為正非線性增益。至此完成了自適應魯棒控制器的設計。坦克高低向系統控制器的誤差反饋律表述為

(28)
2.3 基于RBF神經網絡的未建模擾動項估計
RBF神經網絡的隱含層節點使用徑向基函數作為激活函數,采用輸入節點與中心向量的距離為函數自變量。其結構如圖8所示。
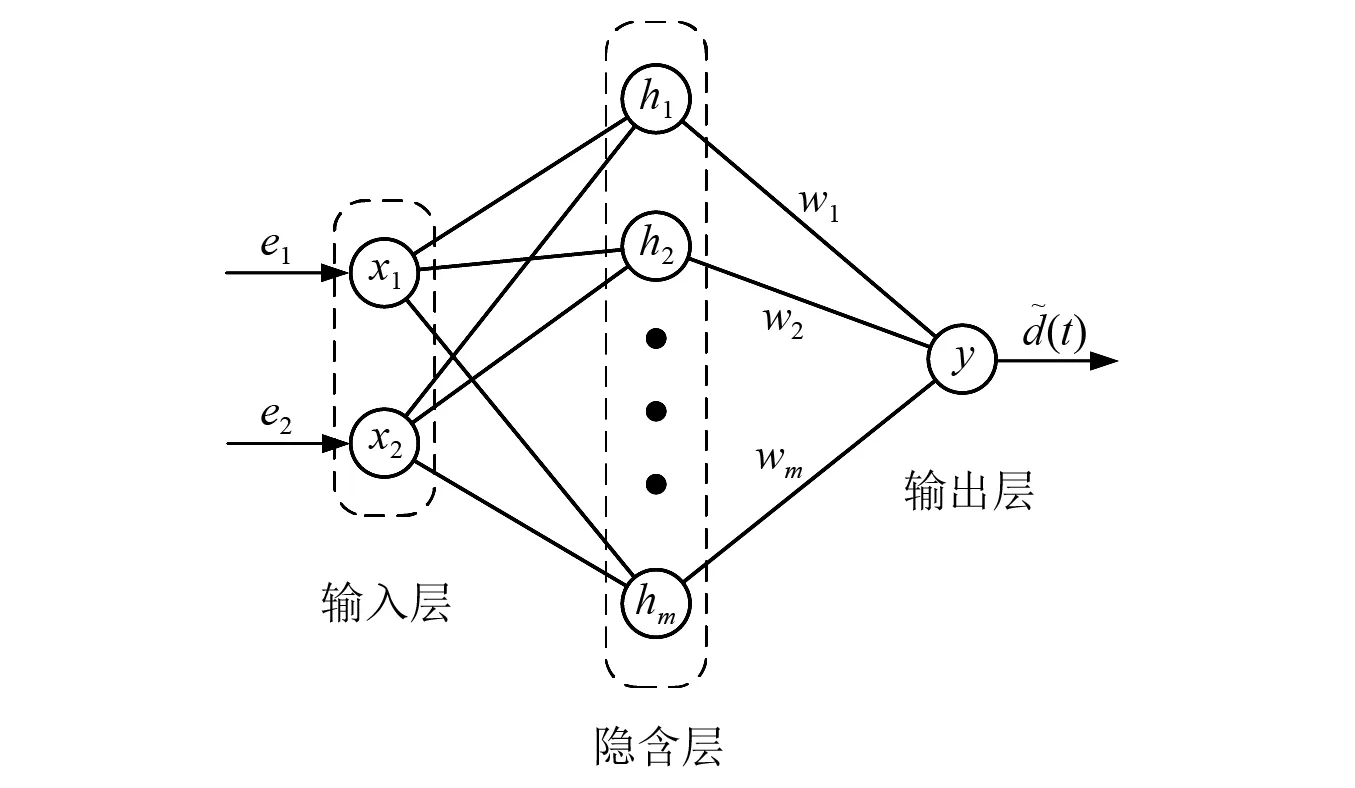
圖8 RBF神經網絡原理框架Fig.8 The principle framework of RBF neural network
(29)
其輸出結果為
(30)
式中:WT為連接隱含層與輸出層的權重矩陣;hk(x)為隱含層的非線性函數;ε為逼近誤差。非線性函數hk(x)選擇如下
(31)

(32)
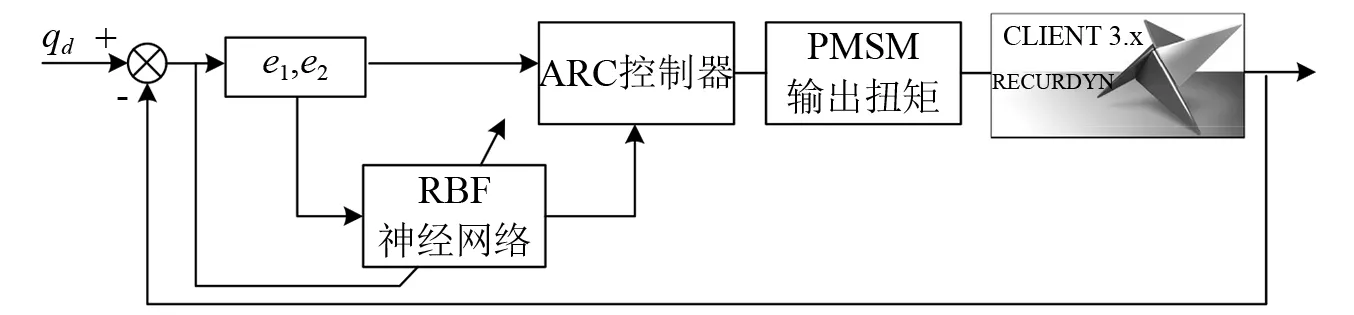
圖9 本文炮控系統控制器與車炮系統多體模型聯合仿真流程Fig.9 The co-simulation flow chart of gun controller and vehicle-gun system multibody model
3 聯合仿真分析
根據圖9搭建Matlab/Simulink與RecurDyn多體模型的聯合仿真模型,計算坦克在不同行駛工況下控制器的控制效果。研究中聯合仿真系統模型的原理圖,如圖10所示。
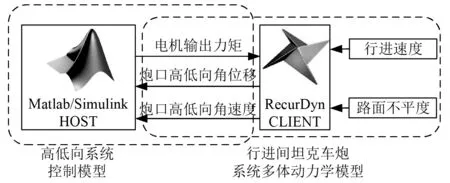
圖10 聯合仿真系統模型原理Fig.10 Principles of co-simulation system model
通過坦克炮的穩定精度來表征控制器性能[21],其為炮口角振動振幅的算數平均值
(33)
式中:n為總的采樣點數;θi為每個采樣點的炮口俯仰角度。
為了驗證上述算法有效性,本文中對未建模擾動補償的RBF神經網絡坦克炮自適應控制與常規PID(proportional integral derivative)控制進行仿真比對。炮控系統高低向的永磁同步電機主要參數,如表1所示。
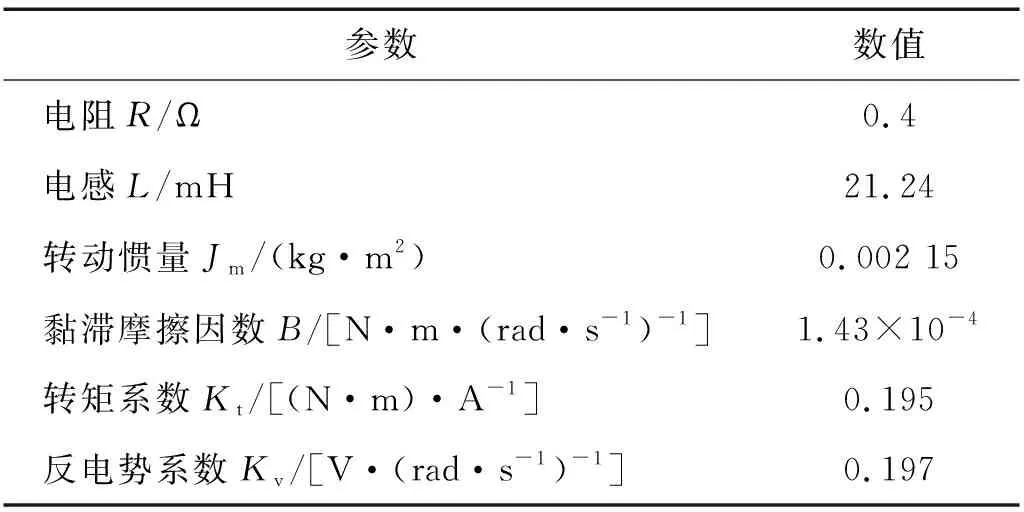
表1 永磁同步電機主要參數Tab.1 Parameters of PMSM in this article
3.1 角度跟蹤性能分析
仿真時長設計為10 s,根據實際坦克炮高低向穩定系統參數,聯合仿真中設計最大角速度指令不超過0.436 rad/s,最大角加速度指令不超過0.698 rad/s2。在4 s時給一個0.1 rad的階躍響應信號。在D級路面下控制算法與PID控制器的跟蹤特性曲線,如圖11所示。兩者均在4.5 s前后分別達到穩定,控制算法跟蹤速度略快于PID,且較為平滑,達到指令后超調和振蕩都較小。
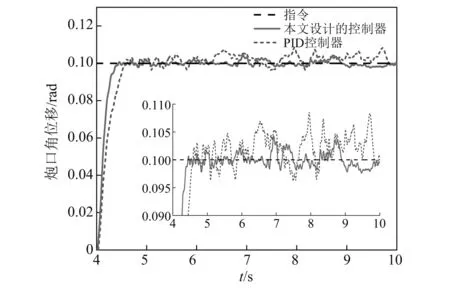
圖11 兩種控制算法在控制指令為0.1 rad下的階躍響應Fig.11 The step response of the two controllers under the control command of 0.1 rad
3.2 抗干擾性能分析
坦克分別以20 km/h,30 km/h,在D級和E級兩種等級路面條件下,分別基于RBF神經網絡補償未建模動態的自適應魯棒坦克炮控制器與PID控制器的炮口擾動曲線,如圖12所示。10 s內上述4種工況通過式(33)計算出的穩定精度,如表2所示。由表2可知,坦克以20 km/h行駛在D級路面,此時的穩定精度為1.060 mrad,相較于傳統PID的2.362 mrad提升了55.12%。
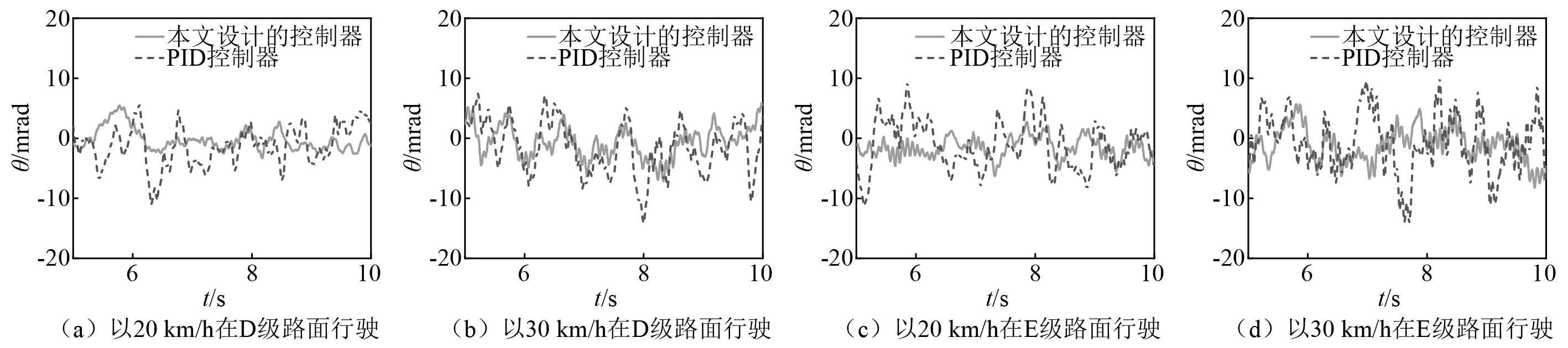
圖12 不同車速與路面工況下兩種算法的穩定性能比對Fig.12 Comparison of the stability of the two controllers under different vehicle speeds and road conditions
與坦克以20 km/h行駛在D級路面相比,當路面狀況變為E級路面,與PID的控制結果相比提升了達到了60.98%;隨著車速的提高至30 km/h,與PID的控制結果相比提升了更是達到了62.70%。以上數據表明,隨著外界擾動的增加PID算法對坦克的控制效果逐漸變差,而提出的算法體現出較強的魯棒性與穩定性。
上述仿真結果根據式(33)計算得到的兩種控制器分別以20 km/h,30 km/h,在D級和E級兩種等級路面條件下行駛得到的穩定精度,如表2所示。
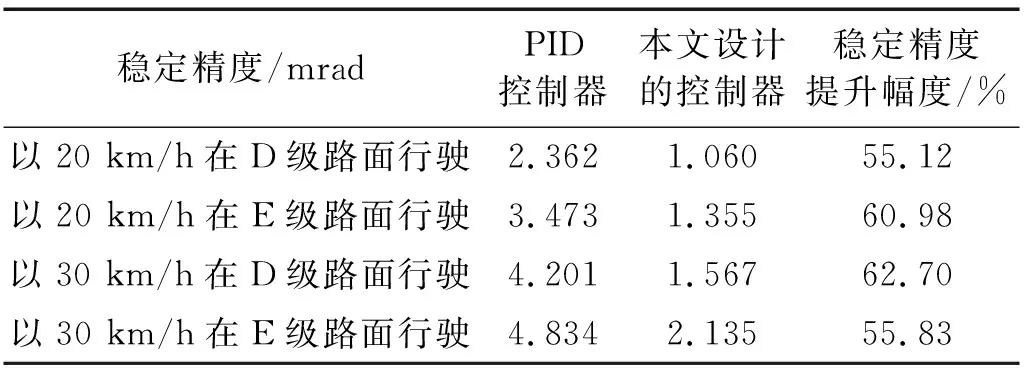
表2 兩種控制器在不同工況下的穩定精度Tab.2 Under different conditions in the stability and accuracy of both controllers
4 結 論
標定了包含非線性多因素的車炮系統多體動力學模型參數,并在Matlab/Simulink中針對永磁同步電機伺服控制系統,設計了帶有未建模動態補償的RBF神經網絡坦克炮控系統自適應魯棒控制策略。利用RBF神經網絡的自學習能力,對自適應魯棒控制中的未建模動態誤差進行估計補償。RecurDyn與Matlab/Simulink的聯合仿真試驗表明,設計的控制器相較于已有PID控制器的魯棒性與抗干擾能力要好,較未進行補償的自適應魯棒控制的跟蹤性能優越。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
