基于路網信息輔助的多星編隊系統SAR-GMTI動目標徑向速度估計與重定位方法
2023-03-09 02:54:46李相海楊志偉廖桂生韓超壘
系統工程與電子技術 2023年3期
關鍵詞:方法
李相海, 楊志偉,*, 賀 順, 廖桂生, 韓超壘, 姜 巖
(1. 西安電子科技大學雷達信號處理國家重點實驗室, 陜西 西安 710071; 2. 西安科技大學通信與信息工程學院, 陜西 西安 710054; 3. 上海衛星工程研究所, 上海 200090)
0 引 言
多星編隊雷達系統結合干涉合成孔徑雷達(interferometric synthetic aperture radar, InSAR)技術與地面運動目標指示(ground moving target indication, GMTI)技術可執行高精度的測高、測速等重要任務[1-2]。動目標徑向速度估計與重定位是SAR-GMTI研究的重點內容[3]。單星多通道系統可利用通道間的相干特性實現雜波抑制,通過進一步結合自適應匹配濾波(adaptive matched filtering, AMF),可估計得到目標徑向速度[4]。我國的高分3號SAR衛星具有雙通道GMTI模式[5-6],可滿足高精度的動目標測速定位任務需求。多星編隊系統可靈活構成多組有效基線,是實現更好的最小可檢測速度(minimum detectable velocity, MDV)和更高的測速定位精度的重要途徑[7]。文獻[8]公開了超長沿航跡基線構型下的TerraSAR-X和TanDEM-X雙星編隊GMTI實驗結果,極大程度地提升了目標的定位、測速和測向精度。對于多星編隊系統,混合基線構型引入的地形干涉相位是制約系統GMTI處理性能的關鍵因素[9-10]。一方面,地形干涉相位使得雜波空間分布具有高程依賴性,雜波非均勻問題突出,進而導致雜波抑制性能惡化;另一方面,地形干涉相位與動目標徑向速度干涉相位的耦合問題[11],導致動目標參數估計性能嚴重惡化。針對雜波非均勻問題,已有相關研究工作提出基于地形干涉相位補償的穩健雜波抑制方法[12],此處不再贅述。針對動目標參數估計,文獻[13]提出了一種多通道多像素聯合處理方法,文獻[14]利用目標相鄰像素對相干信息進行高度補償,可實現目標參數估計和定位功能,其測速精度高于單像素法。但是,動目標徑向速度易導致成像位置發生偏移,目標真實位置與成像位置存在高度偏差,進而導致出現徑向速度估計偏差。為此,文獻[15]提出基于非線性陣列結構的干涉相位解耦合策略,文獻[16]利用數字高程測量(digital elevation model, DEM)信息迭代補償目標高程干涉相位。但是,這兩種方法必須滿足非線性陣列系統的約束條件,給系統設計和信號處理帶來了挑戰。
針對上述動目標參數估計難題,本文提出一種基于路網信息的迭代自適應匹配(knowledge based iterative AMF, KBI-AMF)算法,該算法可實現混合基線構型下的目標徑向速度估計與重定位。算法核心是利用交通路網先驗信息輔助補償動目標成像位置與其真實位置之間的高程差,對補償后的數據采用自適應匹配算法,進行動目標徑向速度估計與重定位。為了提高算法的穩健性,進一步將重定位結果進行反饋并輔助目標高程補償,采用迭代的方式獲得最終的測速定位結果。此外,本文基于混合基線系統構型下的動目標信號模型,重點分析了線性陣列與非線性陣列構型下動目標高程干涉相位耦合對徑向速度估計的影響。最后,基于仿真的多星SAR圖像數據GMTI處理實驗結果表明,本文方法能夠有效消除目標高程的影響,在地形起伏場景中具有較好的徑向速度估計和重定位性能,并且對線性和非線性陣列系統都具有很好的適用性與穩健性。
1 信號模型
假設由L個衛星構成多星編隊系統,其觀測構型如圖1(a)所示,目標存在高程起伏情形時,觀測場景示意圖如圖1(b)所示。將不同通道的數據排成列矢量z=[z1,z2,…,zL],其二元假設下的信號形式如下:
(1)
式中:zc=σc·ac⊙x表示雜波信號,σc表示雜波強度,ac表示雜波導向矢量,x表示雜波通道間的隨機擾動,⊙表示Hadamard積;zT=A·a(h,vr)表示目標信號,A表示目標信號強度,a表示目標導向矢量;v表示白噪聲。
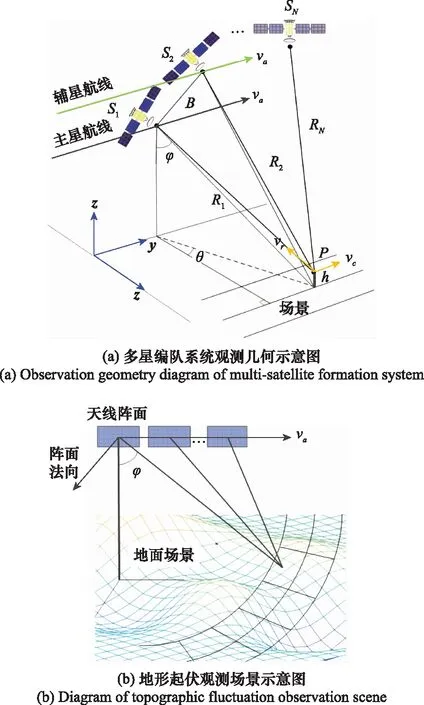
圖1 多星編隊系統幾何模型Fig.1 Geometric model of multi-satellite formation system
如圖1(a)所示,星載編隊雷達系統沿航跡基線與垂直航跡基線同時存在。沿航跡基線對目標徑向速度敏感,垂直航跡基線對目標高程敏感。因此,混合基線構型下動目標干涉相位與地形干涉相位相互耦合[16],動目標信號的導向矢量可表示為
a(h,vr)=ac(h)⊙as(vr)=
[1,ejα1h,…,ejαL-1h]T⊙[1,ej β1vr,…,ej βL-1vr]T
(2)

2 徑向速度估計
2.1 干涉相位耦合問題
在混合基線構型下,針對動目標干涉相位耦合問題,可通過地形高程干涉相位估計與補償實現GMTI任務[17]。然而,在實際處理過程中,動目標的真實位置未知,在利用目標成像位置所在鄰域的雜波高程干涉相位對目標進行補償時,難免存在補償剩余:
A·a(Δh,vr)
(3)
式中:ac(hc)表示目標成像位置鄰域的雜波導向矢量;(·)*表示取共軛;Δh表示動目標成像位置與真實位置之間的高程差。由式(3)可見,利用目標鄰域內的雜波導向進行補償,無法完全消除地形高程干涉相位的影響,由此引入的高程補償誤差會進一步導致徑向速度估計性能惡化。僅考慮目標導向矢量a(Δh,vr)的干涉相位,可將式(3)中目標高程與速度的耦合關系表示為
(4)
式中:φl表示第1個空間通道與第l個通道的干涉相位。由式(4)可以看出,在混合基線構型下,目標速度干涉相位與高程干涉相位并非獨立存在,在特定條件下,二者具有線性關系。因而,在自適應匹配處理過程中,目標高程補償誤差將轉化為徑向速度估計偏差。
對于線性陣列構型,不同空間通道的基線關系為固定比例,即αl/βl=κ,為固定常數。對應的相位關系滿足φl(h,vr)=βl(κΔh+vr)由此可得目標導向關系滿足:
a(Δh,vr)=as(κΔh+vr)
(5)
由式(5)可見,目標的速度導向和高程導向關系完全等效,高程補償誤差完全轉化為徑向速度估計偏差。因此,對于線性陣列構型,利用可空域自由度無法實現干涉相位解耦合。
對于非線性陣列構型,不同空間通道對應的比例系數αl/βl不同,與之對應的方位與俯仰維陣列導向結構不同。根據二維波達角(direction of arrival, DOA)估計理論,可采用二維最優波束形成的方式估計DOA參數[18]。因此,對于非線性陣列的干涉相位耦合問題,可利用空域自由度實現解耦合。式(3)中的目標導向同時存在速度與高度兩個未知變量,需要將自適應匹配濾波算法[4]擴展為二維匹配估計:
(6)
式中:RC表示雜波協方差矩陣;(·)-1表示矩陣求逆操作。通常,為加快算法收斂速度,式(6)可采用坐標輪換法(coordinate descent, CD)交替優化求解[19]。利用空域自由度對速度和高度交替匹配搜索,即可得到徑向速度的估計結果。
下面根據式(3)所給的信號模型,仿真分析目標高程補償誤差對徑向速度估計的影響。設目標速度vr=3 m/s,目標信噪比為20 dB,雜波的雜噪比為20 dB,雜波通道幅/相誤差為0.3 dB/3°,隨機向量x=[x1,x2,…,xL]T服從復高斯分布,其他系統參數如表1所示。在仿真實驗中,通過設置不同的目標高程補償誤差,進行100次蒙特卡羅實驗,統計速度估計均方根誤差(root mean square error, RMSE),并給出相應的變化曲線。
圖2(a)和圖2(b)分別是非線性、線性陣列構型下采用AMF方法時的速度估計均方根誤差與目標高程誤差的響應曲線。由圖2可明顯看出,目標高程干涉相位補償誤差導致一維AMF算法的估計偏差較大,并且成像位置與真實位置地形高程變化越大,導致的徑向速度估計偏差越大。對比圖2(a)和圖2(b)可見,在非線性陣列構型下,二維AMF算法可實現速度-高程解耦合,其速度估計誤差較小。但是,對于線性陣列系統構型二維AMF方法估計目標徑向速度偏差較大,甚至失效。這是因為線性陣列構型下目標的速度導向與高程導向完全等價,高程補償誤差完全轉化為徑向速度估計偏差。
2.2 所提方法
針對混合基線構型下目標高程干涉相位耦合導致的徑向速度估計偏差問題,通常可借助外部先驗信息輔助來完成目標參數估計。文獻[20]的研究結果表明,利用交通路網先驗信息輔助可提高目標徑向速度估計精度。其中,路網信息一方面可通過地理信息系統(geographic information system,GIS)獲取,另一方面可直接利用SAR圖像在線提取[21-22]。文獻[16]提出了一種基于DEM先驗信息輔助的最大似然估計(coordinate descent maximum likelihood, CDML)方法。CDML算法的核心思想是利用先驗DEM信息補償目標成像位置與真實位置之間的高程差,進而采用一維匹配濾波估計徑向速度,最后根據徑向速度估計與重定位結果重新補償目標高程差,通過交替迭代處理得到最終估計結果。CDML方法可提高混合基線構型下的目標徑向速度估計性能。但是,式(6)中的目標速度和高度兩個變量存在耦合關系,當目標高程差較大時,徑向速度估計偏差較大,進而導致CDML算法無法收斂。
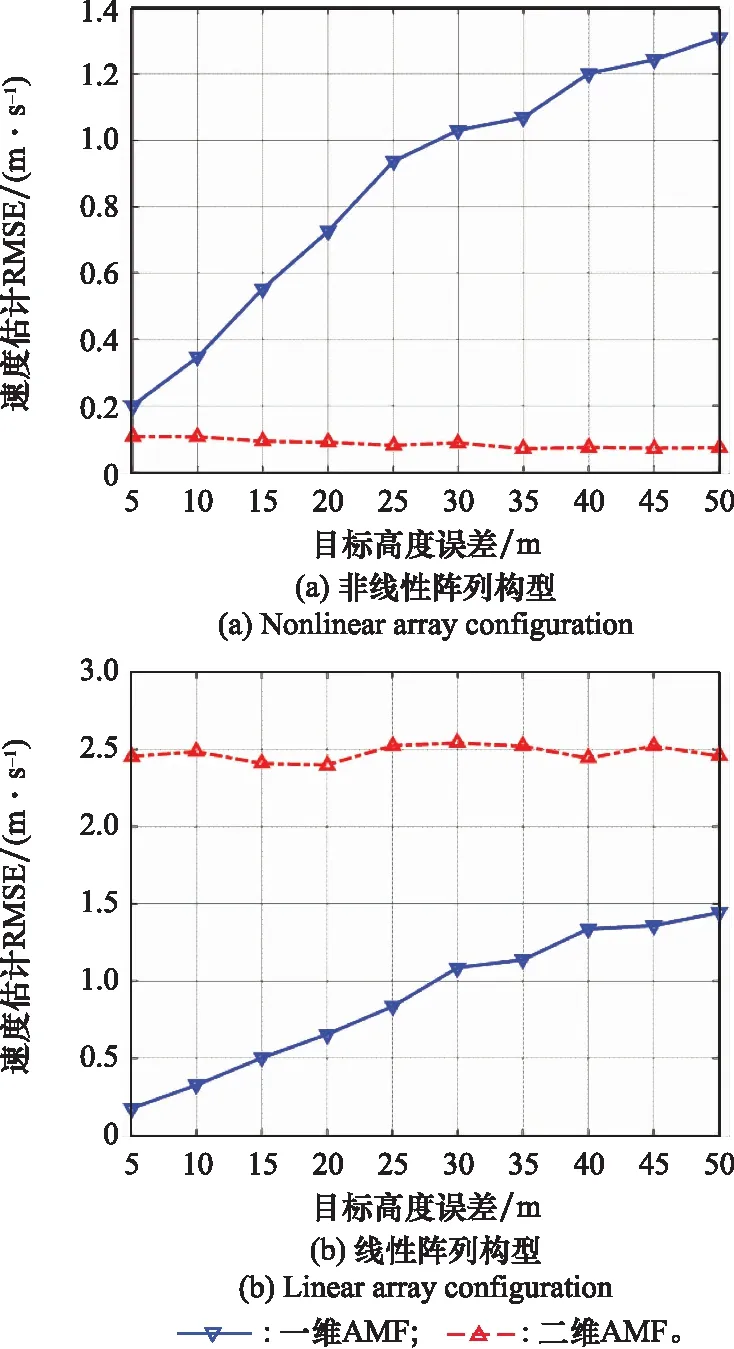
圖2 高程補償誤差導致的徑向速度估計偏差Fig.2 Target velocity estimation bias caused by elevation compensation error
本文提出的KBI-AMF算法用于混合基線構型下的目標徑向速度估計與重定位,其算法處理流程圖如圖3所示。首先,基于交通路網先驗信息補償目標真實位置與成像位置之間的高程差,然后利用自適應匹配濾波算法估計目標徑向速度,最后將目標重定位的結果與路網信息結合,重新補償目標高程差,通過迭代處理獲得最終的目標徑向速度估計與重定位結果。KBI-AMF算法的執行步驟如下。
步驟 1雜波抑制與目標檢測。
混合基線構型下的雜波抑制首先需要通過地形干涉相位補償來消除雜波的地形依賴性,補償方法參見文獻[12]。補償后采用圖像域的空時自適應算法進行雜波抑制[23],目標檢測采用恒虛警(constant false alarm rate, CFAR)檢測方式。
步驟 2在目標鄰域內估計高程導向矢量。
依據地形緩變假設,目標檢測位置鄰域內的雜波具有近似相同的高程干涉相位導向。利用特征值分解的方式估計高程干涉相位導向:
(7)

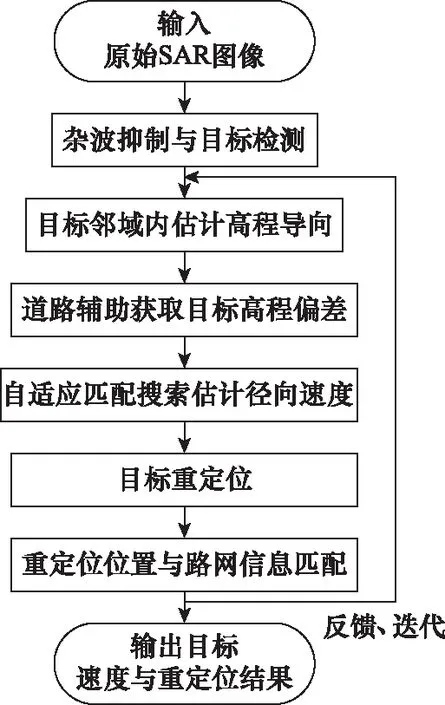
圖3 本文算法流程圖Fig.3 Flowchart of the proposed algorithm
步驟 3利用路網先驗信息補償動目標成像位置的高程差。
(8)

(9)
步驟 4利用自適應匹配濾波算法估計動目標徑向速度。
利用一維搜索估計目標的徑向速度:
(10)

步驟 5利用徑向速度估計結果對動目標重定位。
根據式(10)中的徑向速度估計結果對目標重定位:
(11)
式中:yD表示目標檢測結果對應的方位位置;RT表示目標斜距。
步驟 6動目標重定位結果與路網位置信息匹配。
依據動目標成像理論,當目標速度與高度完全匹配時,目標重定位誤差最小。所以,動目標重定位結果與路網位置誤差最小的估計結果為有效估計:
(12)

步驟 7考慮到實際處理過程中先驗信息誤差的影響,將步驟6中的重定位結果代入步驟3中,輔助估計目標高程差。通過迭代處理重復執行步驟3~步驟6,獲得最終的目標徑向速度估計與重定位結果。
當目標徑向速度較大時,目標成像位置方位偏移較大,目標可能出現同時跨多條道路的情形,導致目標高程補償存在較大高程差。由式(5)可知,高程補償誤差將直接轉化為徑向速度估計和重定位的偏差,進而導致本文算法的迭代過程無法收斂。此時,可利用目標回波的時域特性預估目標的運動參數。典型地,在SAR成像中常用距離走動補償來實現動目標速度參數估計[24-25]。由目標速度的預估值對目標重定位,得到其真實位置所在的區域,用來輔助目標高程補償,進而采用本文算法的處理流程獲得更加準確的估計結果。
3 仿真驗證
本節針對多星編隊SAR-GMTI系統,利用基于真實地形場景DEM數據仿真的SAR圖像數據驗證本文方法的有效性。以星載四星編隊SAR-GMTI系統為例,仿真參數配置為:軌道高度為700 km,衛星飛行速度為7 500 m/s,工作波長為0.03 m,脈沖重頻為4 000 Hz,發射帶寬為50 MHz,目標信噪比為20 dB,雜波的雜噪比為20 dB。仿真實驗包含兩個觀測場景,分別仿真非線性陣列構型和線性陣列構型下的GMTI處理目標徑向速度估計與重定位性能。詳細參數如表1所示。
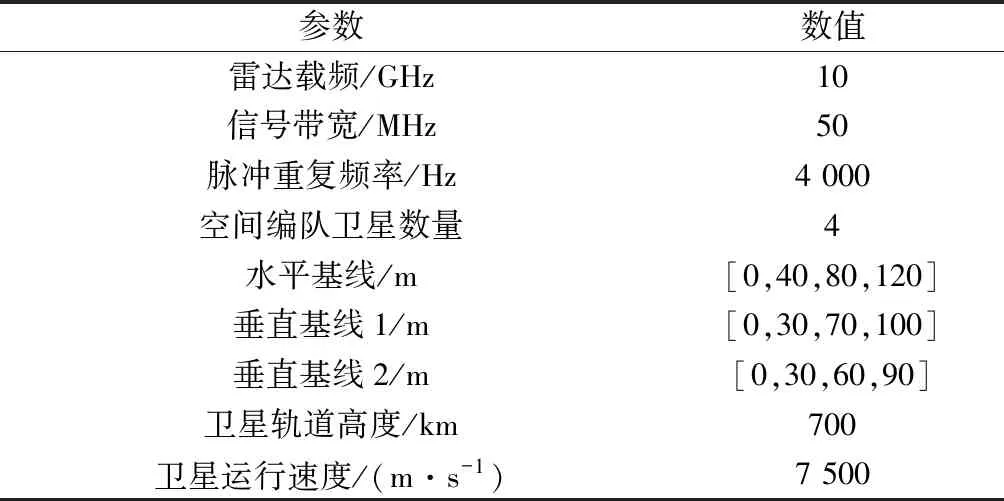
表1 雷達系統參數
3.1 仿真實驗1
非線性編隊構型的垂直基線分別為0 m、30 m、70 m、100 m。數據仿真結果如圖4所示,其中,圖4(a)為仿真場景的DEM圖,圖4(b)為原始幅度圖,圖4(c)為干涉相位圖。從干涉相位圖可明顯看出,地形高程干涉相位沿距離和方位兩維快速變化。在這類觀測場景中,目標真實位置與成像所在位置的高程干涉相位存在較大差異,導致目標高程干涉相位補償誤差,進而影響徑向速度估計性能。為驗證本文方法的有效性,下面進一步給出GMTI處理結果。將本文算法的處理結果分別與一維AMF方法、CDML方法、速度估計克拉美羅界(Cramer-Rao bound,CRB)方法進行對比。其中,CRB由高斯假設下的Fisher信息矩陣求逆計算得到,詳細計算過程可參考文獻[26]。
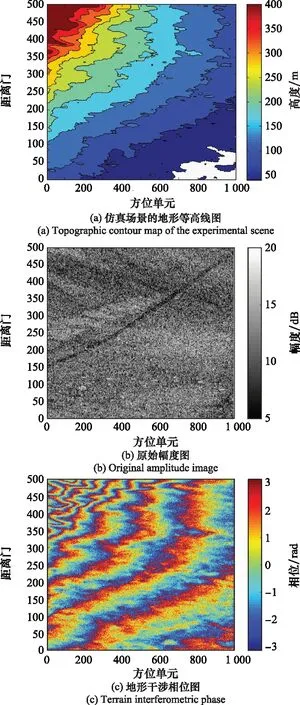
圖4 場景1的多星SAR圖像數據仿真結果Fig.4 Simulation result of multi-satellite SAR image
根據SAR-GMTI處理流程,對于混合基線構型首先要補償地形干涉相位。本文采用二維頻域補償方法,可以避免由補償過程導致的動目標干涉相位損失。然后,進行雜波抑制和目標檢測處理,對于檢測到的目標采用所提算法進行目標徑向速度估計。道路先驗信息事先已知,在實驗中直接給出道路中心線的位置坐標,并假設其誤差滿足[-5,5]像素區間內的均勻分布。最后,在仿真實驗中,通過設置徑向速度不同的點目標,進行50次蒙特卡羅實驗,統計速度估計均方根誤差RMSE,并給出相應的變化曲線。對高程干涉相位補償后的目標數據,分別利用一維AMF方法、CDML方法和本文方法進行速度估計,得到目標的徑向速度估計結果,給出不同方法估計的RMSE與目標徑向速度的變化曲線,如圖5所示。
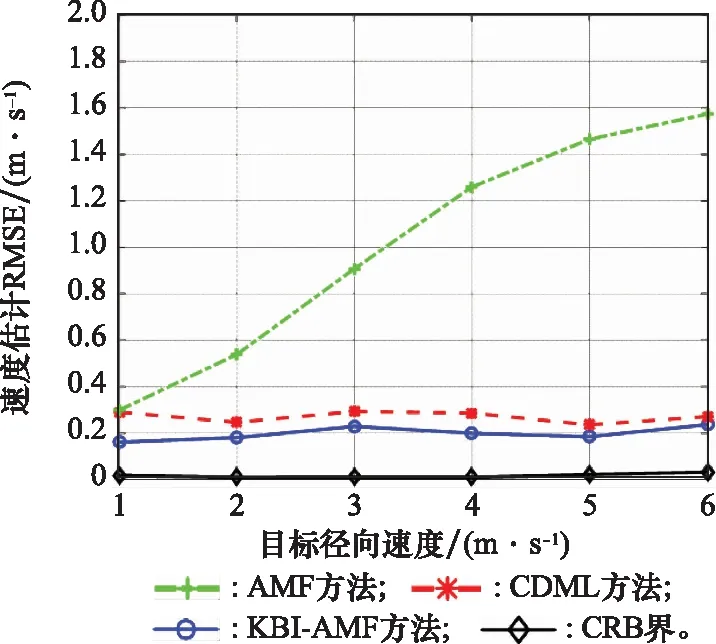
圖5 非線性陣列構型RMSE隨目標徑向速度的變化曲線Fig.5 RMSE versus target radial velocity under nonlinear array configuration
由圖5可見,將AMF方法直接用于混合基線構型下的動目標徑向速度估計,存在較大的誤差,并且目標速度越大,RMSE值越大。這是因為目標速度越大,其成像位置偏離真實位置越遠,高程干涉相位補償誤差越大。從圖4(a)和圖4(c)可見,在本文的實驗條件下,目標方位位置偏移越大,對應的地形高度差越大。仿真結果表明,目標地形高程干涉相位補償誤差導致AMF徑向速度估計方法性能嚴重惡化,甚至失效。圖5中,藍色實線是利用本文方法獲得的RMSE變化曲線,黑色實線是徑向速度估計克拉美羅界。從圖5可以看出,在非線性陣列構型下,采用CDML算法交替搜索和采用本文算法,可明顯提升徑向速度估計精度。
根據動目標成像理論,由徑向速度的估計結果可對目標重定位。圖6是根據徑向速度估計值對運動目標重定位的結果,圖6中藍色圓圈標出了檢測到的目標位置,黃色菱形標出了目標重定位的真實方位位置。由圖6可見,動目標因徑向速度使得成像后的方位偏離公路,經GMTI處理后,動目標被重定位到與其檢測位置同一距離門的公路上。對比圖6(b)~圖6(d)明顯可見,AMF方法受到高程干涉相位補償誤差的影響,測速重定位性能惡化,采用本文所提方法能夠獲得更高的目標徑向速度估計精度。
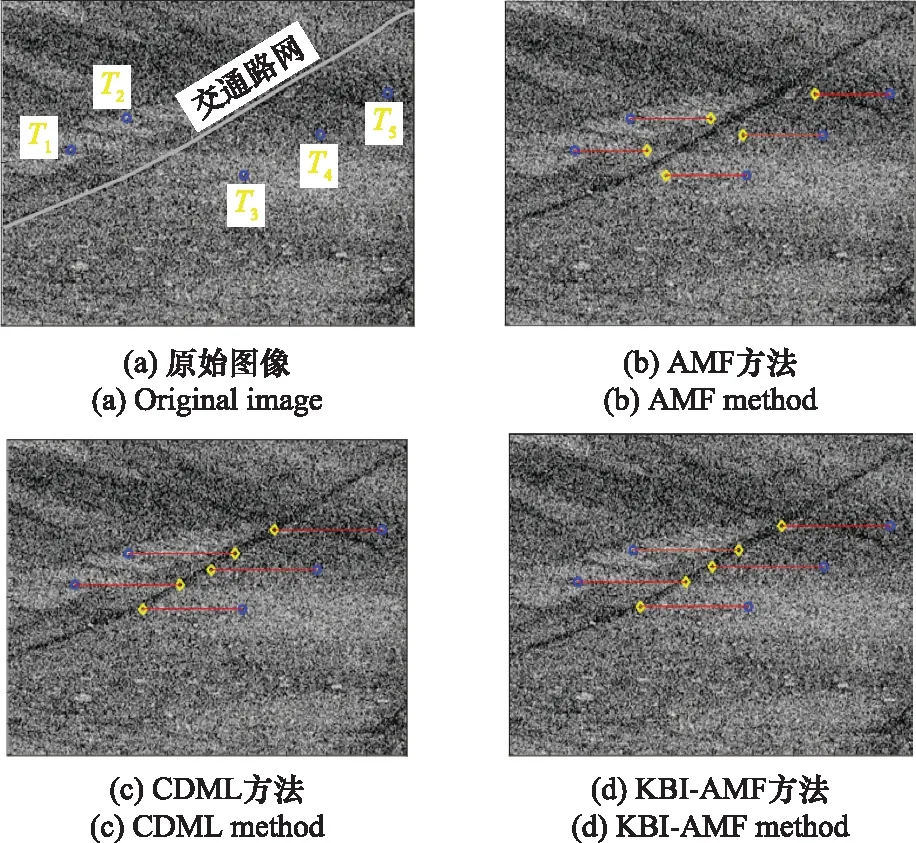
圖6 非線性陣列構型下的目標重定位結果Fig.6 Target relocation results under nonlinear array configuration
3.2 仿真實驗2
線性編隊構型的垂直基線分別為0 m、30 m、60 m、90 m。數據仿真結果如圖7所示,其中圖7(a)為仿真場景的DEM圖,圖7(b)為原始幅度圖,圖7(c)為干涉相位圖。
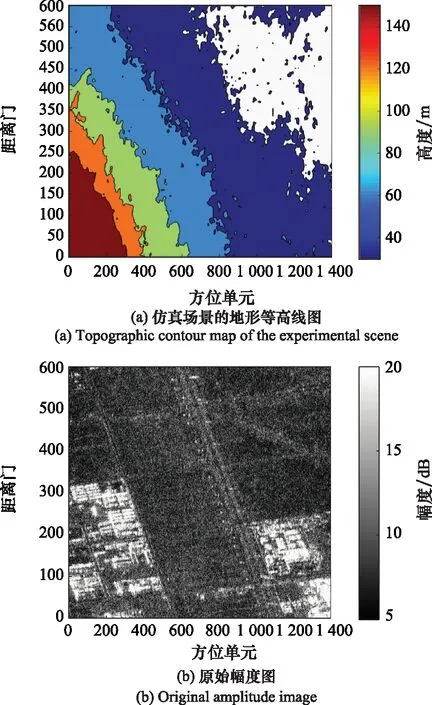
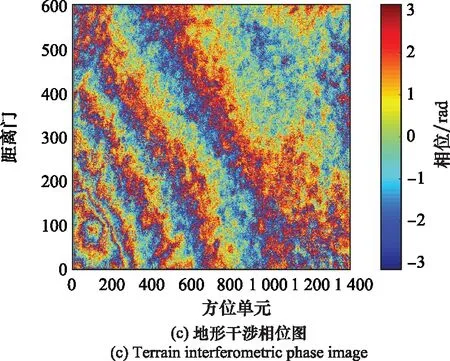
圖7 場景2的多星SAR圖像數據仿真結果Fig.7 Simulation result of multi-satellite SAR image
下面通過GMTI處理結果驗證本文所提方法在線性陣列構型下的適用性與有效性。仿真實驗通過設置徑向速度不同的點目標進行50次蒙特卡羅實驗,統計速度估計均方根誤差RMSE,由不同處理方法估計的RMSE與目標徑向速度的變化曲線如圖8所示。
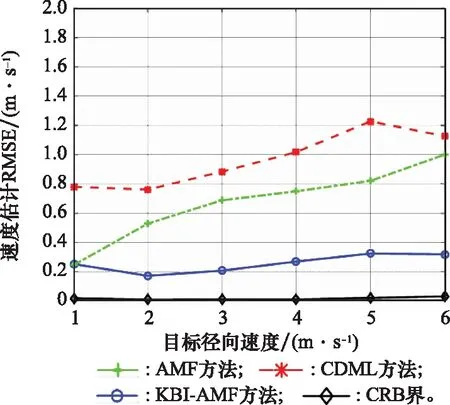
圖8 線性陣列構型RMSE隨目標徑向速度的變化曲線Fig.8 RMSE versus with target radial velocity under linear array configuration
由圖8可見,當將AMF方法和CDML方法直接用于線性陣列構型時,動目標徑向速度估計存在較大的誤差。這是因為AMF方法和CDML方法無法解相位耦合,高程干涉相位補償誤差直接轉化為目標速度估計誤差。并且,CDML方法的徑向速度估計RMSE比AMF更大,因為當目標徑向速度估計偏差較大時,高程干涉相位補償誤差也隨之增大,從而導致CDML算法迭代過程發散。仿真結果表明,AMF方法和CDML方法在線性陣列構型下的徑向速度估計方法性能嚴重惡化,甚至失效。圖8中,藍色實線是利用本文方法獲得的RMSE變化曲線,相比于AMF方法和CDML算法,采用本文所提算法可顯著提升徑向速度估計精度。
從圖7(b)可以看出,觀測場景中存在多條道路,因此會導致速度估計的多值問題。本文利用徑向速度的估計結果對目標重定位,進而將重定位結果與路網信息匹配。由此剔除存在多條道路時帶來的虛假估計,得到最終的目標徑向速度估計與重定位結果如圖9所示。圖9中,藍色圓圈標出了檢測到的目標位置,黃色菱形標出了目標重新定位的真實方位位置。圖9(a)標出了目標檢測位置,T1~T4為目標。其中,目標T4因徑向速度較大,同時跨越兩條道路。對比圖9(b)~圖9(d)的處理結果明顯可見,AMF方法與CDML方法受到高程干涉相位補償誤差的影響,其測速重定位性能惡化,重定位位置明顯偏離道路。采用本文所提方法進行GMTI處理后,目標被重新定位到與其檢測位置同一距離門的公路上。特別地,從圖9(d)中可以看出,目標T4同時跨越多條道路,采用本文算法處理后,可得到更準確的徑向速度估計與重定位結果。
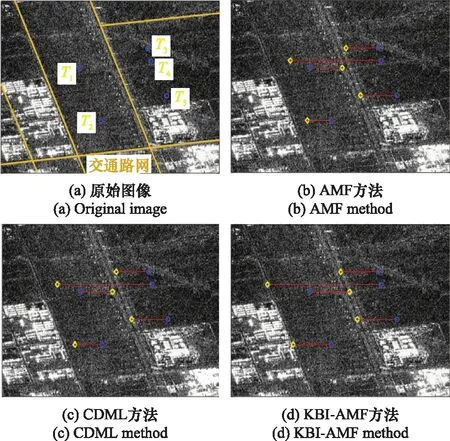
圖9 線性陣列構型下的目標重定位結果Fig.9 Target relocation results under linear array configuration
綜合實驗1和實驗2的結果不難看出,當多星編隊SAR-GMTI系統存在混合基線時,目標的高程干涉相位補償誤差不可忽略,直接采用AMF方法估計目標徑向速度會存在嚴重的估計偏差。在非線性陣列構型下,采用CDML算法交替搜索可緩解高程干涉相位補償誤差的影響,從而提升徑向速度估計精度。但是,在線性陣列構型下,CDML方法無法解相位耦合,高程干涉相位補償誤差直接轉化為目標速度估計誤差,算法性能嚴重惡化。本文所提方法可有效消除高程干涉相位補償誤差的影響,且不受陣列構型的制約,具有很好的測速重定位精度。
3.3 算法穩健性分析
眾所周知,基于先驗信息的信號處理算法的穩健性受到先驗信息本身的精度以及多源圖像匹配程度的制約。近年來,多源圖像配準和圖像融合技術快速發展[27-28],相關研究表明,利用像素、強度、結構、紋理、輪廓、區域等多層次特征提取與融合[29],可實現像素級的圖像融合精度[30]。為了進一步降低先驗信息提取誤差的影響,本文方法采取迭代處理,獲得最終的目標徑向速度估計與重定位結果。下面進一步驗證本文所提方法的收斂性與穩健性。假設道路信息的隨機誤差服從[-10,10]像素區間內的均勻分布,采用本文方法進行50次蒙特卡羅實驗,統計目標徑向速度估計均方根誤差RMSE,并給出速度估計RMSE與迭代次數的變化曲線,如圖10所示。從圖10可以看出,經過2~3次迭代,即可收斂,證明本文方法對路網信息誤差具有很好的穩健性。
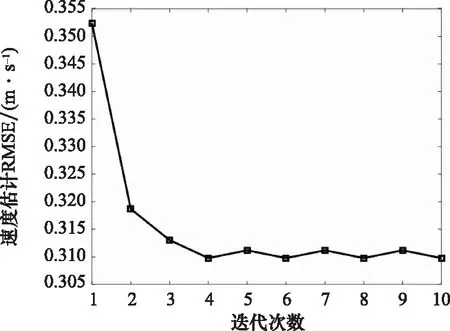
圖10 目標徑向速度估計RMSE隨迭代次數的變化曲線Fig.10 RMSE of radial velocity estimation versus number of iterations
4 結 論
多星編隊雷達系統在SAR-GMTI處理時面臨著由混合基線引入的目標高程干涉相位耦合問題,嚴重制約動目標徑向速度估計性能。針對該問題,本文提出了一種基于路網信息輔助的動目標徑向速度估計與重定位方法,可有效解決由目標高程差導致的徑向速度估計偏差問題,并且可同時適用于線性和非線性陣列構型。基于真實DEM的多星編隊系統仿真SAR圖像數據的GMTI處理結果表明,所提方法可有效消除高程干涉相位補償誤差的影響,提升多星編隊混合基線系統在地形起伏場景下的目標徑向速度估計與重定位性能,且不受系統構型的制約。特別地,對于地形存在突變的復雜地理場景,可通過高精度的DEM先驗信息輔助,來提高目標測速定位精度。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56