三元組近場效應的饋電系數修正與各向異性分析
2023-03-09 02:54:48魯嘉淇郭琨毅金從軍盛新慶
系統工程與電子技術 2023年3期
唐 波, 魯嘉淇, 郭琨毅, 金從軍, 盛新慶
(1. 北京科技大學計算機與通信工程學院, 北京 100083; 2. 北京理工大學集成電路與電子學院射頻技術與軟件研究所, 北京 100081; 3. 北京仿真中心, 北京 100037)
0 引 言
半實物射頻仿真是一種實物在回路仿真,其將待測試的雷達導引頭實物引入仿真回路,以在最大程度上模擬真實試驗環境,從而得到最逼近真實情況的結果。同時,半實物仿真僅需在微波暗室中進行,克服了外場試驗費用較昂貴的不足。因此,半實物射頻仿真已成為雷達導引頭研發過程中的一個重要環節。在世界上的一些主要國家和地區,都建立有半實物射頻仿真實驗室,比較著名的有美國的陸軍高級仿真中心、埃格林空軍基地導彈仿真實驗室,俄羅斯“雷達MMS”科工公司,英國的馬可尼公司等[1-2]。我國也在相關的科研院所建立了半實物射頻仿真實驗室,例如上海航天局等[3]。這些半實物射頻仿真實驗室在實際工作中都發揮了重要的作用。半實物射頻仿真系統處于微波暗室中,主要包括曲面狀的天線陣列墻、三軸飛行轉臺、仿真控制系統等。在天線陣列墻上,以正三角形構型整齊排列多個輻射單元,相鄰的3個單元構成一個三元組。在仿真系統工作時,三元組的3個單元可以同時工作,其輻射場在空中疊加,在轉臺處其合成輻射場的能流方向(或相位梯度方向)與真實環境下某個點目標的回波的能流方向相同,從而仿真了該方向的點目標[4]。改變3個單元的相對饋電幅度,就可以改變合成場的能流方向,從而可以對點目標在不同方位位置處及整個運動過程中的回波進行仿真。
三元組所仿真的點目標的方位位置可以使用幅度重心公式來表達[3]。根據不同的物理解釋,幅度重心公式可以有不同的導出方法[5-6]。根據重心公式,仿真點目標的位置可以表達為三元組的3個單元位置的加權組合,其權重即為每個輻射單元的饋電幅度。幅度重心公式是一個簡潔而又有一定近似程度的公式。其反映的是一種方位角度維的空間線性插值,通過空間中的3個單元,線性插值出待仿真的目標點。三元組的3個單元相當于空間采樣點,因而在輻射單元附近,仿真誤差較小。三元組的張角越小(即空間采樣步長越小),仿真精度越高。這是由于采樣步長越小,線性插值的精確性越好。也就是說,當三元組的張角較大時,線性插值會存在較大誤差,因而需要使用非線性插值。這就是三元組的近場效應和近場誤差。關于三元組近場誤差和近場修正的研究,已有多篇文獻發表。文獻[3]明確指出,此近場非彼近場,即三元組近場不同于單元近場。文獻[7-8]認為,導引頭接收到的3個單元發出的不同方向的平面波不能使用一個方向的平面波來替代,是產生三元組近場誤差的原因。文獻[9]研究了高精度毫米波系統的近場誤差問題;文獻[10]通過嚴格的電磁計算方法來研究三元組近場誤差;文獻[11]研究了復合陣列的近場誤差變化規律;文獻[12]通過函數擬合的方法進行了近場誤差修正。對于存在不可忽略的三元組近場誤差的仿真系統,通常需要建立修正表格,在仿真時加以矯正。在建立修正表格的過程中,可以采用不同的算法,以獲得修正量。文獻[13]通過計算雷達導引頭的響應函數的梯度,來獲得每次迭代所需要的修正量。文獻[14]通過差分重心公式來獲得每次迭代的修正量。差分重心公式的本質是通過增加一個點目標,把仿真偏離的點目標拉回,即增加的點目標與存在近場誤差的仿真點目標的空間線性插值正好落在仿真點目標正確的方位。上述文獻基本都集中于分析近場效應的產生原因和修正方法,而對于近場誤差的各向異性卻鮮有提及。實際上,在三元組張角逐漸增大的過程中,除了帶來三元組近場效應,三元組結構的形狀特性以及待測試雷達導引頭的形狀特性也將顯現。這些在三元組被濃縮為一個點的情況下不會出現的問題將會被顯現出來,導致三元組近場誤差不一定隨導引頭自旋對稱,即可能存在各向異性。雷達技術的精進對仿真精度提出了更高的要求,因而對三元組近場誤差進行更深入的分析和處理是有必要的。
本文將對三元組近場效應進行研究,以改進饋電系數計算公式,降低三元組近場誤差的影響,并對三元組近場誤差的各向異性進行深入分析。本文在解析分析中,將單元天線在導引頭處的輻射場按照平面波進行處理,而在藉以比較的數值計算中嚴格按照球面波處理。另外,文中所稱導引頭(口徑面)旋轉若非特別說明皆指繞縱軸旋轉,即自旋。
為了聚焦問題,本文在分析中令三元組的3個單元進行了相位配平,且3個輻射單元在轉臺方向上的天線增益相同。
1 幅度重心公式及饋電系數的極坐標解
在半實物射頻仿真的研究中,幅度重心公式具有重要的理論意義和實用價值。本文的研究也將在幅度重心公式的基礎上展開。首先建立分析所用的坐標系[15],如圖1所示。
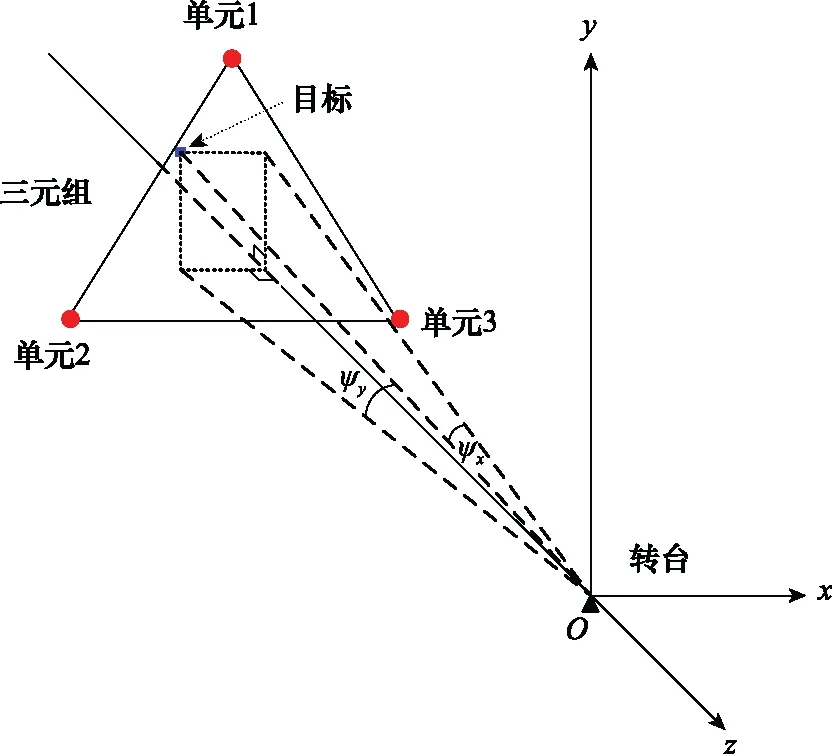
圖1 坐標系Fig.1 Coordinate system
以導引頭的輻射口面中心點為坐標原點,建立xyz直角坐標系。其中,以雷達導引頭的輻射口面為xy面,導引頭天線陣列的兩個正交的基線方向分別為x方向和y方向。三元組的3個單元的坐標為(xi,yi,zi)(zi?xi,yi;i=1,2,3)。目標的坐標為(x,y,z)(z?x,y;)與文獻[16]相同,令
(1)
(2)

(3)
(4)
式中:Ci0(i=1,2,3)為第i個單元的由幅度重心公式給出的饋電系數,正比于各輻射單元的饋電電流大小。式(3)和式(4)為簡單的線性方程組,其一個重要特點是具有對xy平面的旋轉對稱性。
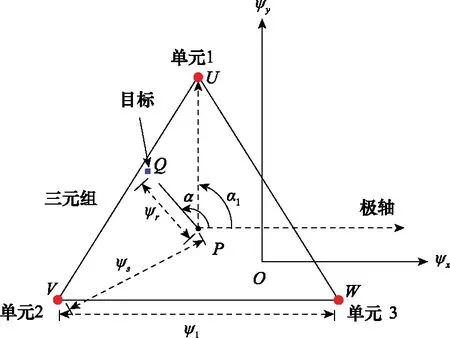
圖2 二維角域坐標系Fig.2 Coordinate system in two-dimension angular domain
(5)
可以看到,饋電系數表達式只與目標在三元組中的相對位置有關,而與極角的絕對大小無關。由于極軸定義在導引頭口徑的天線基線上,因而導引頭的旋轉不影響重心公式的結果,饋電系數僅取決于待仿真目標點在三元組中的相對位置,而與導引頭的旋轉無關。這實際上是因為幅度重心公式的導出基于忽略導引頭口面和三元組口徑尺寸的影響,把其近似為點狀,因而具有旋轉對稱性。另外,由于三元組結構是120°旋轉對稱的,當導引頭口面固定時,Ci0關于目標的極角位置α具有120°的旋轉對稱性。
除了對稱性分析,式(5)也給出了另外一種直觀的認識。可以將(5)中的第一項視作零階項,將第二項視作微擾項。很顯然,第一項表達的是仿真點在三元組中心時的饋電系數,而微擾項相當于增加了另外一個仿真點,從而將仿真點從中心拉到正確的位置。此處顯現的物理意義實際上與文獻[14]討論的差分重心公式具有一致性。
2 針對比相式單脈沖雷達的饋電系數修正
三元組相對于轉臺存在一定的張角,基于幅度重心公式給出的饋電系數將導致仿真結果存在三元組近場誤差[3]。為了克服該誤差,此處針對比相測向體制對饋電系數的計算進行修正。假設導引頭口徑面上有4個具有不同等效相位中心點的天線單元,其中,兩幅天線單元在x方向上構成一幅干涉儀,另外兩幅天線單元在y方向上構成一幅干涉儀。兩個方向上的干涉基線長度分別為Lx和Ly,如圖3所示。
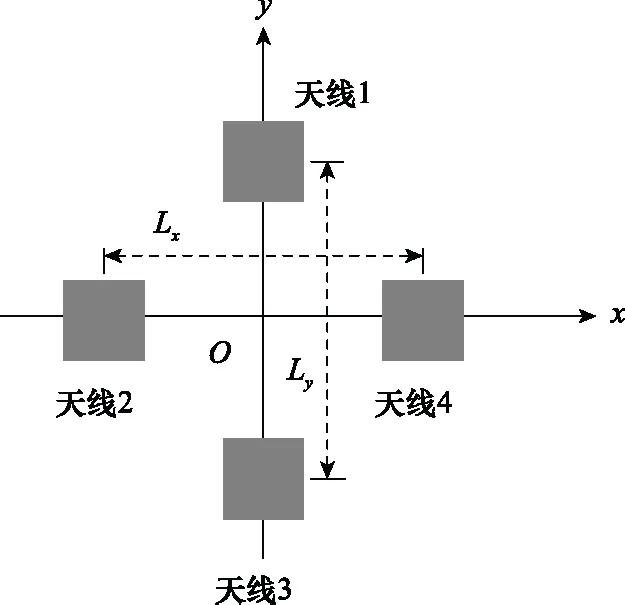
圖3 接收口徑天線分布Fig.3 Antenna distribution in receiving aperture
將三元組各單元的相位依據其到O點的距離進行校準,即各單元到達O點的場同相位。三元組的各單元處于導引頭口徑的遠場,則天線2和天線4接收到的三元組3個單元的輻射場分別為
(6)
(7)
式中:Ci為第i個單元的饋電系數。天線2和天線4接收到的目標的輻射場分別為
(8)
(9)
仿真環境下的天線口面場的相位信息應該等于實際環境下的天線口面場的相位信息,因而有
(10)
可得
(11)
式(11)的直觀涵義是復信號疊加時,在相量圖中,與最終合成結果方向垂直的部分合成為零。如圖4所示,粉色的分量部分疊加為零。

圖4 三元組單元輻射復信號相量合成圖Fig.4 Phasor synthesis diagram of the complex signal radiated by the triad units
同理可得
(12)
(13)
(14)
可以使用式(13)和式(14)計算避免了三元組近場誤差的饋電系數:
(15)
需要注意的是,式(15)中α和αi值的獲取依賴于導引頭口徑天線基線取向,而當導引頭可以三維自由轉動時,α和αi值的獲取是困難的,因此在實際工作中往往難以基于式(15)計算饋電系數。下面對該式進行展開分析。
令kLx/2=kLy/2=Γ。對sin函數做級數展開,只保留到三次項,并且注意到sin(α2+α3)=sin 2α1,通過推導可得第i個(i=1,2,3)單元的饋電系數為
(16)
其中

(17)


(18)

(19)
式(19)即為導引頭旋轉姿態未知時的饋電系數的最佳估計。
3 近場誤差的各向異性
ΔCi隨導引頭的旋轉而變,表明在不同的導引頭口徑面旋轉姿態下,近場誤差是不同的,即近場誤差相對于導引頭口面旋轉而言存在各向異性。下面對其做詳細分析:首先由饋電系數的差導出仿真位置的偏移量,即近場誤差。
(20)
(21)


圖5 三元組近場誤差的分解Fig.5 Decomposition of the near field error of the triad
(22)
(23)

4 數值結果
采用如圖1所示的坐標系。三元組的3個單元在初始xyz坐標系中的坐標為(0,0.2,15),(0.2 cos7/6π,0.2 sin 7/6π,15),(0.2 cos 11/6π,0.2 sin 11/6π,15),單位為m。工作頻率為15 GHz。導引頭口面天線基線長度Lx=Ly=0.2 m。
當目標方向處于三元組中心點時,對于仿真場景進行嚴格計算得出的仿真誤差結果為1.0×10-4rad,而解析公式給出的結果為9.7×10-5rad,兩個結果基本吻合。
分別基于式(5)、式(19)和式(15)給出的饋電系數進行仿真,并與真實目標方向比較,得出近場誤差,如圖6和圖7所示。式(5)為重心公式的結果,式(19)為依賴導引頭基線長度的結果,式(15)為需要依賴導引頭旋轉姿態的結果。圖6為初始xyz坐標系下的結果,圖7為xy面繞z軸順時針旋轉45°的結果。
從圖6可以看到,圖6(a)的近場誤差最大,圖6(c)的近場誤差最小,但不為零,因為此時式(15)雖然摒除了三元組近場誤差,但是單元相對于導引頭口面的近場誤差仍存在。圖6(b)的近場誤差雖然大于圖6(c),但相對于圖6(a)仍有顯著的降低。圖7有相同的規律。因此,基于式(19)的饋電系數的計算,有助于克服傳統幅度重心公式計算所帶來的三元組近場誤差。圖6(b)和圖7(b)中的誤差實際上是圖5中的可變量部分,當導引頭旋轉角未知時,該誤差是不可修正的。因此,式(15)給出的饋電系數是導引頭自旋姿態可知時的最優解,而式(19)給出的饋電系數是導引頭自旋姿態未知時的最優解。
對比圖6(a)和圖7(a)可知,在三元組內的誤差幅度分布圖存在差異,這是因為圖5所示的4個分量疊加后的幅度隨導引頭自旋而變;對比圖6(b)和圖7(b)可知,在三元組內的誤差幅度分布圖相同,這是因為圖5所示的兩個可變分量的角度差固定,疊加后的幅度不隨導引頭旋轉而變。這些結果都與前述各向異性分析結果吻合。此外,由圖6和圖7可以看出,式(19)給出的結果比式(5)給出的結果對某些區域的近場誤差可以改善一個數量級;式(15)給出的結果比式(19)給出的結果對某些區域的近場誤差可以改善兩個數量級。式(5)對應的近場誤差來源于三元組近場和單元近場;式(15)對應的近場誤差來源于三元組近場的確定部分和單元近場;式(15)對應的近場誤差僅來源于單元近場。
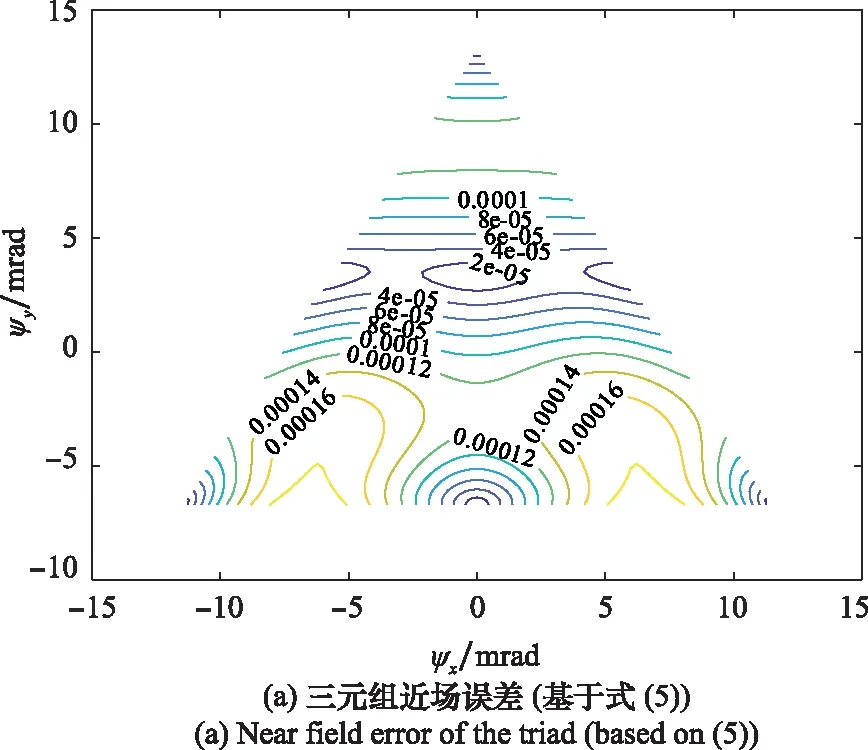
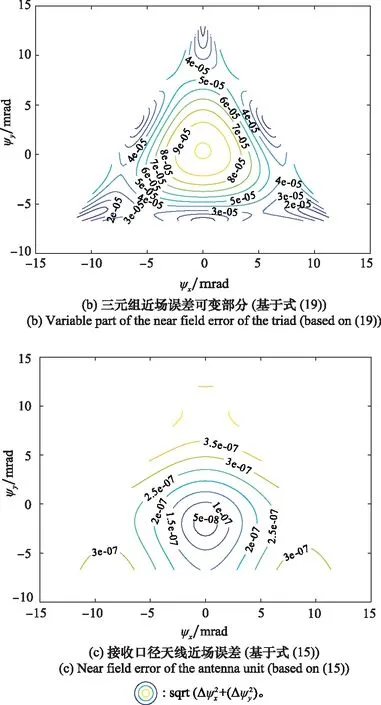
圖6 旋轉角為零時各種饋電系數下仿真的近場誤差Fig.6 Near field error with different feeding coefficients when the rotation angle is zero
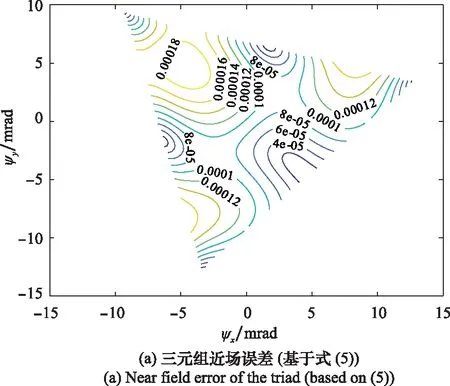
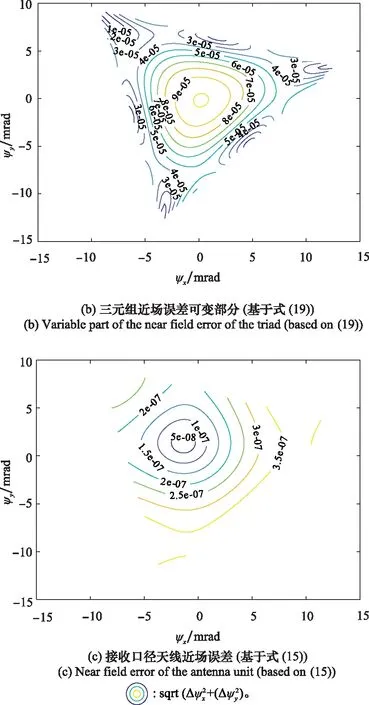
圖7 旋轉角為順時針45°時各種饋電系數下仿真的近場誤差Fig.7 Near field error with different feeding coefficients when the rotation angle is 45°
實際上,圖6(b)和圖7(b)給出的即為導引頭旋轉姿態未知時不可修正的近場誤差的大小。
5 結 論
本文在二維角度域的極坐標系下研究了比相式單脈沖雷達的半實物射頻仿真的三元組近場效應問題,給出了可以克服三元組近場誤差的饋電系數的表達式。該饋電系數表達式可以不依賴于對導引頭口徑面旋轉姿態的掌握。此外,為了分析三元組近場誤差的各向異性,給出了三元組近場誤差的解析表達式。結果表明,比相式單脈沖雷達的三元組近場誤差包括兩個部分,一部分隨著導引頭自旋保持不變,而另一部分則會隨著導引頭自旋而改變,從而導致了三元組近場誤差的各向異性特性。且當導引頭旋轉姿態未知時,存在不可修正的近場誤差大小,即隨導引頭旋轉可變的部分。數值實驗證實了這些分析結果。本文針對的是比相式單脈沖雷達,在后續的工作中將在此基礎上繼續對比幅式單脈沖雷達的三元組近場誤差的各向異性特性展開研究。