基于雙十字陣的海上彈著點定位誤差分析
2023-03-09 02:55:00王世哲李宗吉王平波孫玉臣
系統工程與電子技術 2023年3期
王世哲, 李宗吉, 王平波, 孫玉臣,3
(1. 海軍工程大學兵器工程學院, 湖北 武漢 430033; 2. 海軍工程大學電子工程學院, 湖北 武漢 430033; 3. 中國人民解放軍92767部隊, 山東 青島 266102)
0 引 言
隨著科技的發展,艦炮技術得到了飛速發展,艦炮射擊精度[1](即對艦炮海上彈著點進行定位)一直是海上靶場艦炮武器系統[2-4]試驗過程中特別關注的問題。彈著點位置測量結果是否及時及準確是影響試驗效果的關鍵因素,只有把位置測量結果及時、準確地傳達給指揮員及操作員,才能根據射擊偏差[5-7]調整下一次射擊,從而提高艦炮射擊水平,增強試驗意義,也為后續的武器改進優化提供指導意見。
文獻[8]結合當前靶場彈著點定位系統的現實情況與存在的問題,較為全面地總結分析了各種彈著點定位方法,給出了各種方法的優缺點及適用情況,最后給出結論:被動聲探測技術是解決靶場彈著點定位問題很好的研究方向。文獻[9]也說明了基于聲學的彈著點定位方案具有較高的準確性與較強的穩定性和可擴展性。
文獻[10]按照不同的分類方式對聲源定位算法進行了分類。其中,根據定位原理的不同,聲源定位算法可分為可控波束形成定位算法、基于高分辨率譜的估計定位算法和基于到達時間差(time difference of arrival, TDOA)的定位算法。基于TDOA的定位算法計算量小,定位精度高,得到了廣泛應用。文獻[11]給出了基于TDOA定位算法的水聲陣列的不同組陣方式,對各種陣型的定位原理進行了推導。
三元陣是一種常見的陣型,文獻[12]說明了用三元陣定位時,目標方位不在30°~150°范圍內時誤差很大,因此30°~150°的目標方位范圍可被稱為有效觀察范圍。文獻[12]對三元陣定位做出了詳細的誤差分析。從分析結果可以看出,當彈著點位于中遠程時,三元陣測距誤差較大,測向誤差數值較小。
基于上述研究,本文在三元陣定位的基礎上進行了布陣方式的改進,提出了一種基于雙十字陣的海上彈著點定位方法,簡單闡述了新方法的布陣方案與定位原理,重點對三元陣定位與雙十字陣定位誤差做了詳細分析與仿真,并進行了對比,驗證了“定位精度得到提高”的可靠性。
1 定位原理
基于雙十字陣的海上彈著點定位方法主要有兩個創新點:一是采用十字陣(即雙三元陣)的布設方式。這樣,無論彈著點在哪個方位,總有一個三元陣滿足彈著點相對其方位在30°~150°內,將其稱作工作三元陣,這種布陣方式打破了30°~150°測向范圍的限制,將有效觀察范圍擴大至360°全方位,也解決了目標“左右舷”模糊的問題,進而減小了定位誤差;二是采用雙十字陣(即兩個十字陣)的布設方式,只利用每個十字陣上工作三元陣的測向功能,采用方位交叉的定位原理,形成的兩條方位線的交點即為彈著點位置,這樣可以避開三元陣中遠程定位時測距誤差大的缺點,巧妙應用其測向誤差數值較小的優點,提高了定位精度。
該方法的定位原理可分為以下三部分:一是基于北斗差分的十字陣位置精確標定[13-21]。通過北斗差分定位原理可以精確標定水聽器陣元的空間位置,得出空間位置坐標;二是基于北斗測向原理的工作三元陣航向角估計[22-26]。根據北斗測向原理,可得出雙十字陣中工作三元陣方向偏離正北方向的夾角;三是基于單三元陣的目標方位距離估算。假設三元陣被動定位[27]的模型圖如圖1所示。
圖1 三元陣被動定位模型圖Fig.1 Diagram of three-element array passive location model
則可推算出彈著點方位距離的精確表達式為
(1)
(2)
式中:φ為待估測爆炸點的方位;R2=R為待估測爆炸點的距離;c為聲速;d為陣元間距;τ12表示陣元A、陣元B接收信號的時延差;τ23表示陣元B、陣元C接收信號的時延差;τ13表示陣元A、陣元C接收信號的時延差。
在實際應用場景中,可將彈著點位置視為遠場。利用泰勒展開公式,取二階近似,則彈著點方位距離可近似表達為
(3)
(4)
由式(3)、式(4)可以看出,彈著點在遠場時,τ12和τ23很接近,導致測距公式的分母趨近于0,因此距離估計誤差很大,而方位估計會更加準確。
在上述三部分定位原理的基礎上,可以得出導彈著點位置的原理圖,如圖2所示。其中,θ1、θ2為兩個工作三元陣相對于正北方向的偏角,r、β分別為爆炸點相對靶心的距離和方位,(x1,y1)、(x2,y2)分別為兩個十字陣的中心陣元坐標,(x,y)為靶心坐標(已知),(x0,y0)為爆炸點坐標。
圖2 彈著點定位原理圖Fig.2 Schematic diagram of impact point location
通過推算,在兩個中心陣元與爆炸點構成的三角形OSF中,兩個底角∠SOF、∠SFO分別為90°-(φ1-θ1)-α、90°-(φ2-θ2)+α。利用三角形幾何關系與余弦定理可求出R′,最終可求出爆炸點坐標(x0,y0),進而求出r、β的表達式,可稱爆炸點在靶心(r,β)處。
(5)
(6)
(7)
2 誤差分析與仿真
本文提出的基于雙十字陣的海上彈著點定位方法,其工作原理本質上是單三元陣的定位原理,也就是說,單三元陣的定位誤差決定了雙十字陣的定位誤差,雙十字陣的定位誤差分析要在單三元陣定位誤差分析的基礎上進行。本節對單三元陣與雙十字陣的一系列定位誤差做了詳細仿真分析,并進行了簡要對比,表明了雙十字陣定位的明顯精度優勢。聲速定為1 500 m/s,三元陣的陣元間距定為10 m。
2.1 單三元陣定位誤差
2.1.1 公式近似誤差

表1 由公式近似帶來的測距誤差
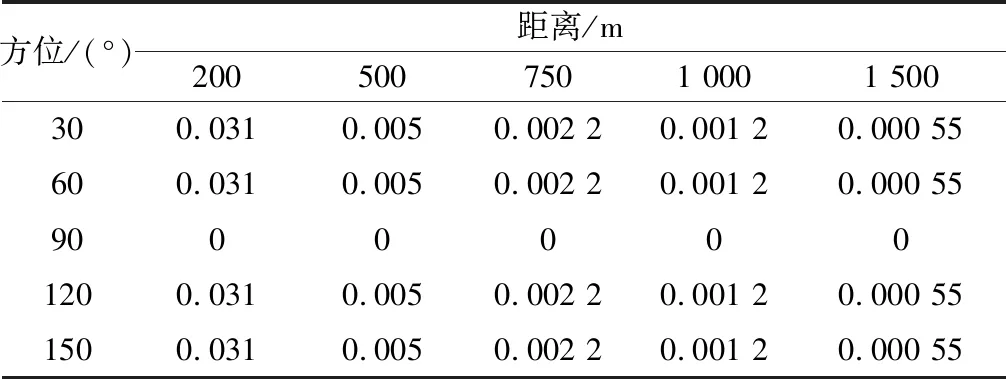
表2 公式近似帶來的測向誤差
由上表可知,在中遠距離時,使用近似公式帶來的誤差可忽略不計,不影響海上彈著點定位的需求。使用近似公式時,隨著爆炸點距離的增大,遠場平面波近似所帶來的誤差會變小。
2.1.2 隨機誤差
測向和測距結果的隨機誤差主要由聲速、各個陣元間的時延差測量結果以及由陣元間距所產生的隨機誤差[29]引起。
下面推導各因素對結果的影響,重寫測向公式:
(8)
假設各項誤差彼此獨立,對式(8)兩邊取對數后全微分,并整理,得出式(9)。
式(9)中的第1項是陣元間距d的測量誤差,在實際安裝時可采用激光定位[30-36]方法,保證Δd<1 mm,而且陣元間距越大,該項誤差越小。第2項是聲速測量誤差[37-42],通常可使其達到0.1%,因此影響不大。第3項、第4項、第5項是時延測量誤差,與前兩項相比,這三項是主要部分。隨著彈著點距離的增大,時延測量誤差也會增大,且爆炸聲信號的傳播也會受海洋環境[43-48]的影響,因此時延估計誤差與目標距離、信噪比等多個因素有關,無法給出一個定量的關系式。下文在進行仿真時,對時延估計誤差均取一個理想固定值(Δτ=10 μs),且假設信噪比足夠高(利于聲信號檢測[49-51])。
(9)
圖3給出了在距離方位不同時由隨機誤差引起的測向誤差圖。由圖3可知,彈著點方位越接近工作三元陣的正橫方向,測向誤差越小。在彈著點距離1 000 m、方位接近正橫的情形時,測向誤差約為0.04°。

圖3 距離和方位不同時由隨機誤差引起的測向誤差圖Fig.3 Diagram of direction finding error caused by random errors at different distances and azimuths
重寫測距公式:
(10)

(11)
與上文分析相同,式(11)的前3項可以忽略,第4項的影響占主要部分。同理,對時延估計誤差取一個理想值(Δτ=10 μs),且假設信噪比理想。圖4給出了在距離方位不同時由隨機誤差引起的測距誤差圖。由圖4可以看出,隨著距離增大,測距誤差增大;彈著點方位越接近工作三元陣的正橫方向,測距誤差越小。在彈著點距離1 000 m、方位接近正橫的情形時,測距誤差約為150 m。
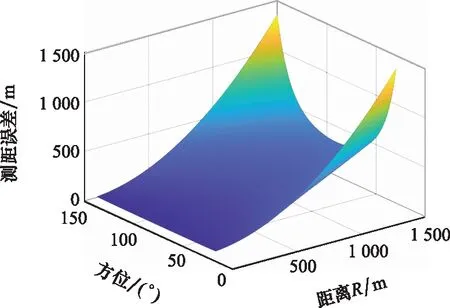
圖4 距離和方位不同時由隨機誤差引起的測距誤差圖Fig.4 Diagram of ranging error caused by random errors at different distances and azimuths
2.1.3 安裝誤差
在實際安裝施工時,3個陣元不可能安裝在一條絕對的直線上,且滿足陣元間距相等,基陣安裝誤差會導致很大的測距誤差,因此必須進行修正,以減小測距誤差[28]。
首先,考慮第1種情況:3個陣元在一條直線上,但陣元位置有偏離,中心陣元B向左平移了距離Δd,陣元間距不相等,如圖5所示。

圖5 三陣元共線、中心陣元位置有偏離時的陣元配置Fig.5 Array element configuration when the three elements are collinear and the position of the center element is deviated
在這種情況下,陣元A、陣元B的間距變為d-Δd,陣元B、陣元C的間距變為d+Δd,到達陣元B的聲程有Δξ的變化,τ12和τ23分別變為
(12)
由此帶來了新的時延差測量誤差,其變化量如式(13)所示。
(13)
由式(10)、式(11),忽略前3項,只考慮最后一項,φ2≈φ,則有
(14)
(15)
圖6、圖7分別給出了在彈著點距離1 000 m、方位接近正橫的情形時,三陣元共線時由安裝誤差Δd導致的測距誤差與測向誤差。
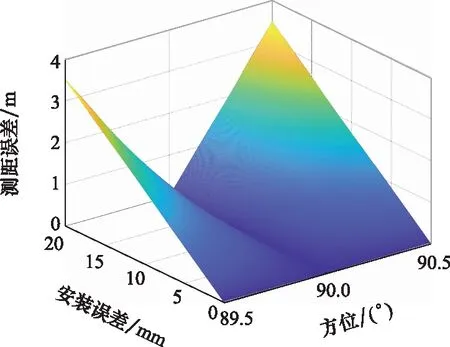
圖6 三陣元共線時由安裝誤差引起的測距誤差Fig.6 Ranging error caused by installation error when three array elements are collinear
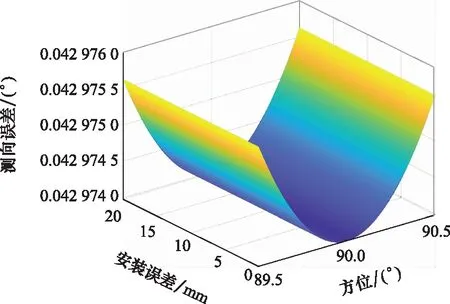
圖7 三陣元共線時由安裝誤差引起的測向誤差Fig.7 Direction finding error caused by installation error when three array elements are collinear
可以看出,在彈著點距離1 000 m、方位接近正橫的情形下,當安裝誤差為20 mm時,對應的測距誤差接近4 m,而對應的測向誤差數值較小。
其次,考慮第2種情況:3個陣元不在同一直線上,陣元B發生了小的偏移,如圖8所示。
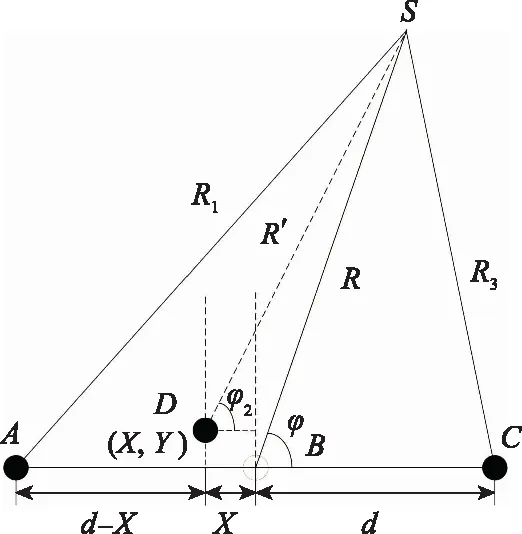
圖8 三陣元不共線、中心陣元位置有偏離時的陣元配置Fig.8 Array element configuration when the three elements are not collinear and the position of the center element is deviated
陣元B偏移到D點,設D點坐標為(X,Y)。B點與D點的程差為
Δξ=R-R′
(16)
與上述第1種情況的推導類似,圖9與圖10給出了陣元B稍有偏離、使陣元A、陣元B、陣元C不在同一直線上時導致的測距誤差與測向誤差。
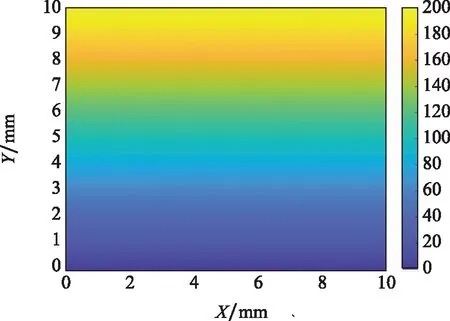
圖9 三陣元不共線時由安裝誤差引起的測距誤差圖Fig.9 Ranging error caused by installation error when the three array elements are not collinear
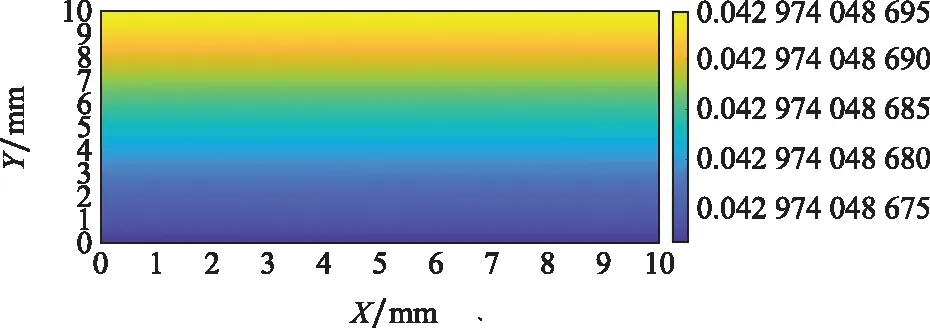
圖10 三陣元不共線時由安裝誤差引起的測向誤差圖Fig.10 Direction finding error caused by installation error when the three array elements are not collinear
可以得出,在彈著點距離1 000 m、方位接近正橫的情形下,當偏差X、偏差Y均為10 mm時,對應的測距誤差很大,而對應的測向誤差數值較小。
2.1.4 搖擺誤差
第2.1.3節在分析安裝誤差時,并未考慮陣列受海浪影響發生搖擺的情況,當陣列發生搖擺時,會產生搖擺誤差[28]。設工作三元陣方向為x軸,中間陣元位于D(X,Y,Z),如圖11所示。
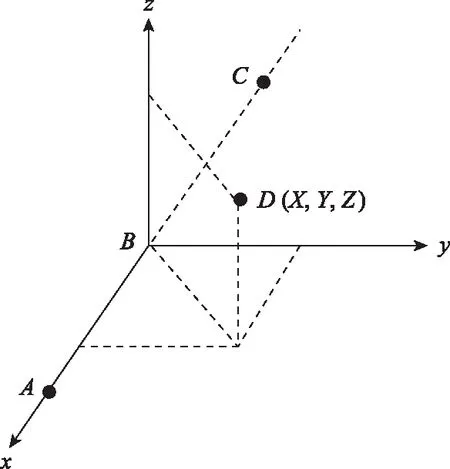
圖11 陣元有偏移時的陣幾何Fig.11 Array geometry when the array element is offset

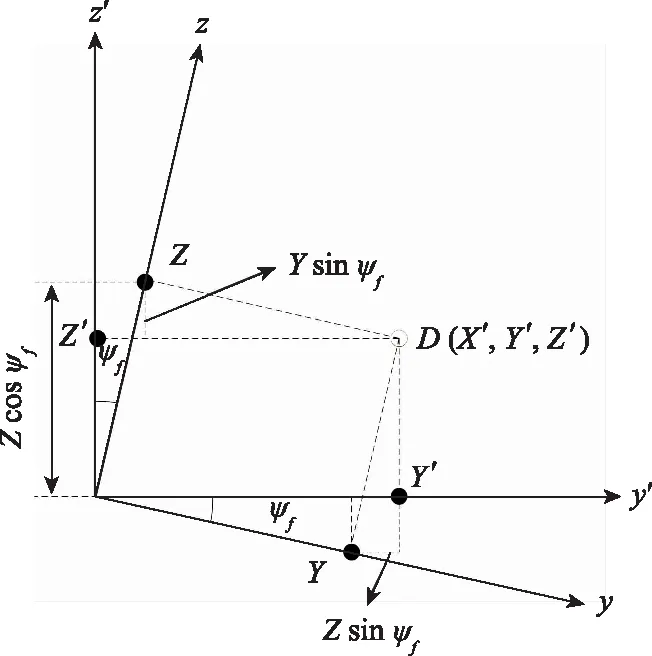
圖12 陣列有橫搖的情況Fig.12 Diagram of the array with roll
(17)
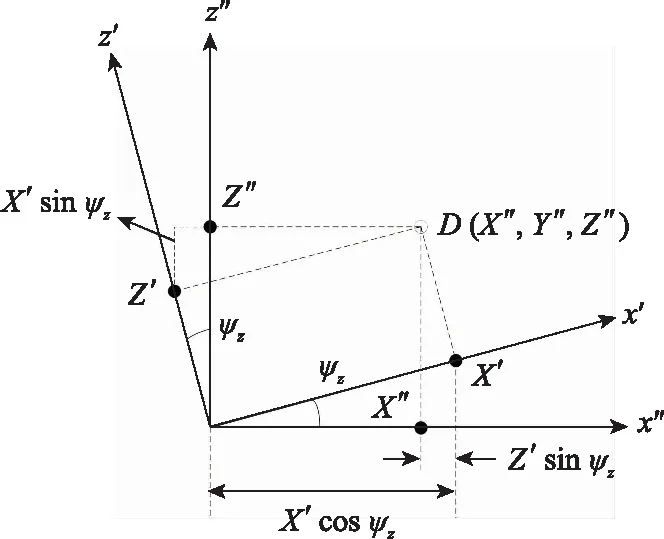
圖13 陣列有縱傾的情況Fig.13 Diagram of the array with trim
(18)
將式(17)代入式(18),得到了陣列在縱傾橫搖情況下,中間陣元B在坐標系x″y″z″下的位置坐標為
(19)
與第2.1.3節第2種情況的推導類似,可以得出在陣列縱傾橫搖情況下,由中間陣元造成的程差變化。
設X、Y、Z的絕對值均為10 mm,圖14與圖15給出了在彈著點距離為1 000 m、方位接近正橫的情形下,不同橫搖角與縱傾角的測距誤差與測向誤差。
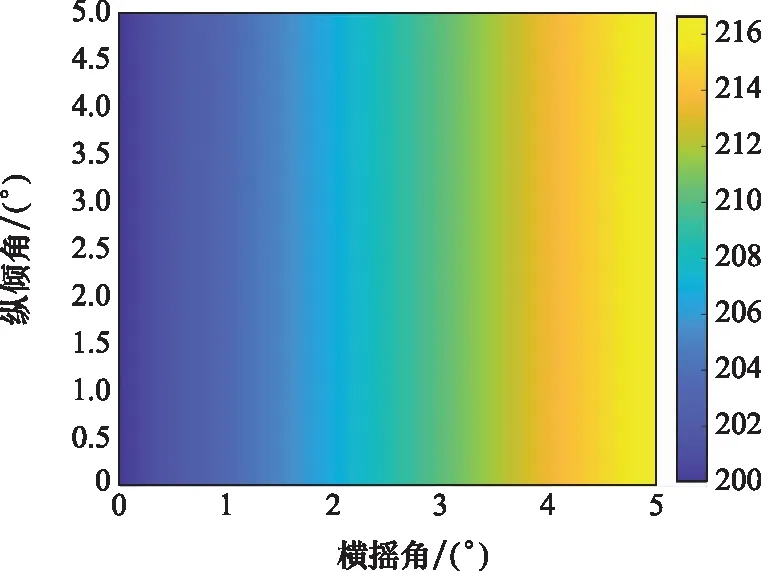
圖14 不同橫搖角與縱傾角時的測距誤差圖Fig.14 Ranging error graph at different roll and pitch angles

圖15 不同橫搖角與縱傾角時的測向誤差圖Fig.15 Direction finding error at different roll and pitch angles
可以得出,當橫搖角與縱傾角均為5°時,測距誤差很大,而測向誤差數值相對較小。
2.2 雙十字陣定位誤差
由上文可知,在不考慮安裝誤差與搖擺誤差的前提下,采用精確公式,此時誤差僅來自隨機誤差。
當彈著點位于圖16所示位置時(彈著點位于靶心附近,靶心相對兩個十字陣方位正橫,距離1 000 m),假設靶心與雙十字陣中心陣元的連線垂直,時延估計誤差值與信噪比與上文相同,均為理想值,此時對兩個十字陣而言,隨機因素帶來的測向誤差約為0.04°,測距誤差約為150 m,ΔR橫≈1 000 sin(2×0.04°)=1.4 m為三元陣的橫向定位誤差,ΔR縱≈2×150=300 m為三元陣的縱向定位誤差。
將黃色區域視作單三元陣的定位誤差區域,紅色區域視作雙十字陣的定位誤差區域。以圖16左側三元陣的中心陣元為原點,建立直角坐標系,兩個十字陣的中心陣元均在X軸上,求得黃色區域面積約為418.88 m2,紅色區域面積約為1.95 m2,因此從理論角度分析,該種情況下,定位誤差降低為單三元陣定位誤差的4.66‰。
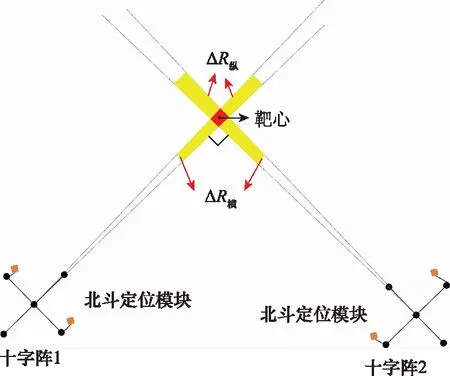
圖16 雙十字陣定位概念圖Fig.16 Conceptual diagram of dual cross-array
3 結 論
本文對基于雙十字陣的海上彈著點定位原理進行了簡要推導闡述,重點對單三元陣定位與雙十字陣定位進行了詳細的誤差分析與仿真。仿真結果表明:在本文分析的算例情況下,基于雙十字陣的艦炮海上彈著點定位方法的定位誤差降低為單三元陣定位誤差的4.66‰,驗證了定位方法的正確性、合理性。本文的研究結果為靶場測量艦炮彈著點提供了新思路、新方法,為艦炮射擊精度的考評提供了參考依據,也為艦炮武器的生產研發與改進提供了必要保障,對提高部隊戰斗力具有重要的意義。